Данная работа представляет собой научную статью "математическое моделирование электродинамического вибростенда в матричной форме пространства состояний". Данная статья разработана Селезневой Светланой Вячеславовной. В работе представлено описание электродинамического вибростенда, его математическое моделирование в пространстве состояний. а также графики частотных и временных характеристик.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ЭЛЕКТРОДИНАМИЧЕСКОГО ВИБРОСТЕНДА В МАТРИЧНОЙ
ФОРМЕ ПРОСТРАНСТВА СОСТОЯНИЙ
В настоящее время широко распространено моделирование различных
механических систем при помощи численных методов и специализированного
программного обеспечения. В качестве математических моделей используются
системы дифференциальных уравнений в стандартной форме Коши. Подобное
представление модели позволяет довольно эффективно и адекватно
моделировать поведение объектов во временной области.
Иначе говоря, задавая различные воздействия в виде функций зависящих
от времени моделировать состояние объекта и отдельных его элементов также в
виде функций зависящих от времени. Для решения ряда задач этого вполне
достаточно. Но в некоторых случаях возникают задачи иного рода, связанные с
исследованиями объектов в частотной области, например исследование
устойчивости механического объекта или исследование резонансных частот. В
таком случае применение подобных моделей оказывается неудобным, так как
приводит к увеличению количества моделирований (объект приходится
моделировать при различных частотах, чтобы сформировать картину его
отклика в частотной области). Гораздо более эффективным решением подобной
категории задач будет получение частотных характеристик, по которым можно
будет определить как резонансные частоты, так и устойчивость системы в
целом.
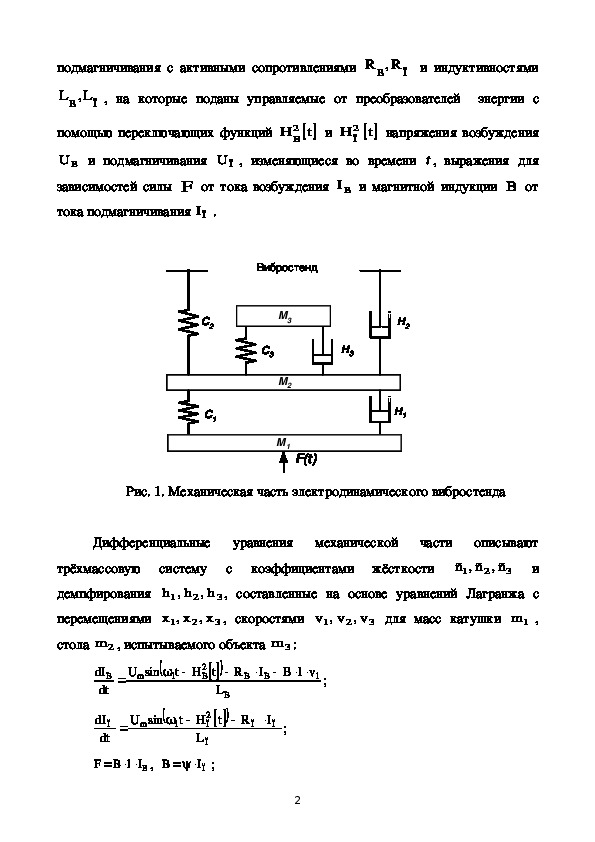
Рассмотрим, к примеру, схему электродинамического вибростенда (рис.1),
который при использовании двух каналов управления с непосредственными
преобразователями электроэнергии описывается системой, включающей в себя
дифференциальные уравнения Кирхгофа для обмоток возбуждения длиной l и
1подмагничивания с активными сопротивлениями
B R,R
Ï
и индуктивностями
B L,L
Ï
, на которые поданы управляемые от преобразователей энергии с
помощью переключающих функций
tH 2
B
и
tH 2
Ï
напряжения возбуждения
BU и подмагничивания
зависимостей силы F от тока возбуждения BI
тока подмагничивания
ÏU , изменяющиеся во времени t , выражения для
и магнитной индукции B от
.
ÏI
C2
C1
Вибростенд
C3
M3
M2
M1
F(t)
H3
H2
H1
Рис. 1. Механическая часть электродинамического вибростенда
Дифференциальные уравнения механической части описывают
трёхмассовую систему с коэффициентами жёсткости
демпфирования
и
, составленные на основе уравнений Лагранжа с
1m ,
для масс катушки
, скоростями
ñ,ñ,ñ
1
3
h,h,h
v,v,v
x,x,x
2
3
2
1
3
2
1
3
2
1
перемещениями
стола
2m , испытываемого объекта
3m :
1
m
tHtωsinU
2
B
L
B
tHtωsinU
2
Ï
m
1
dI
B
dt
dI
Ï
dt
Ï
L
ÏIψB
;
BIlBF
,
IR
B
B
vlB
1
;
R
Ï
I
Ï
;
2hF
1
v
2
dv
1
dt
v
1
m
1
x
2
c
1
x
1
,
dx ;
1
v
1
dt
v
c
1
1
h
h
2
1
h
1
dv
2
dt
c
x
3
3
c
c
2
3
x
2
,
dx ;
2
v
dt
2
v
h
x
3
3
1
v
c
h
2
1
m
3
2
v
2
v
3
h
3
dv
3
dt
m
3
x
2
x
3
c
3
,
dx .
3
v
dt
3
Составленная система уравнений описывает динамические процессы
ЭДВС и может быть использована при моделировании, как статики, так и
динамики систем управления виброиспытаниями. Регулирование тока
подмагничивания ведёт к изменению индукции, а, следовательно, и ЭДС, и
пондеромоторной
этом математическая модель
электродинамического вибростенда оказывается нелинейной, что усложняет
При
силы.
исследование.
Примем
x ,
4
1
v
x ,
2
5
v
x ,
3
6
v
v ,
v
1
1
v ,
2
2
v
v
3
3
v
и
соответственно
dv
3
dt
запишем уравнение электродинамического стенда в матричной форме.
,
v
,
v
,
v
1
,
,
dv
1
dt
dx
2
dt
dx
3
dt
dx
1
dt
dv
2
dt
v
2
4
5
v
6
и
v
3
Получим
tvAtv
,txB
;txDtvCty
где
3A
11
a
a
21
0
1
0
0
22
12
a
a
a
32
0
1
0
23
0
a
a
33
0
0
1
14
a
a
24
0
0
0
0
25
15
a
a
a
35
0
0
0
26
0
a
a
36
0
0
0
;
h
1
m
1
1
h
a
11
a
22
,
h
2
m
2
h
2
a ,
12 m
1
h
3
a
14
c
1
m
1
,
c
1
a ,
15 m
1
,
h
3
a
23 m
2
,
c
1
a ,
24 m
2
a
25
h
1
a ,
21 m
2
c
c
1
3
c
2
m
2
,
2
3
3
.
a
a
33
36
,
h
3
a ,
32 m
c
3
a ,
35 m
c
3
a ,
26 m
T000001B
tv
v
1
F
tx .
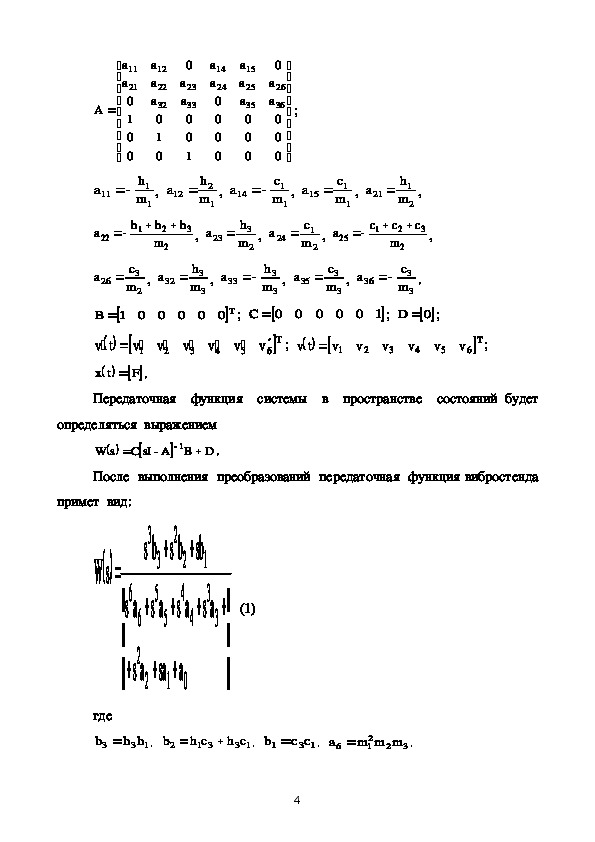
Передаточная функция системы в пространстве состояний будет
100000C
c
3
m
0D ;
h
3
m
3
T
6
tv
v
1
T
;
;
;
v
5
v
4
v
3
v
2
v
v
v
5
v
3
v
2
v
4
;
6
3
определяться выражением
DBAsICsW
1
.
После выполнения преобразований передаточная функция вибростенда
примет вид:
3
bs
3
5
as
5
sa
2
1
2
bs
2
4
as
a
0
6
as
6
2
as
sb
1
3
as
4
3
(1)
sW
где
b
3
hh
13
,
b
2
ch
31
ch
13
,
b
1
cc
13
,
4
mmma
6
2
2
1
,
3
ma
5
1
a
4
m
1
ma
3
1
ma
2
2
3
2
1
2
3
,
3
3
1
3
3
2
3
3
1
1
3
3
1
1
1
31
3
32
mmhmmhmmh
2
3
2
1
1
1
mmhmmh
1
3
1
1
2
mhhmhhmhhmh
1
31
3
1
mmcmmcmmc
2
1
mmcmmcmhh
31
2
2
hh
3
1
mhcmhcmhcmhc
23
12
mhcmhcmhcmhc
11
13
mhcmhcmhcmhc
12
31
mhcmhcmhc
32
13
11
2
hcmc2c
12
31
3
hhcmcc
21
311
hhcmcc
312
32
1
mcc
31
2
321
hcc
31
23
31
13
13
13
1
3
3
1
1
3
2
1
3
1
2
3
,
,
3
3
3
,
1
hccma
131
1
Разделим числитель и знаменатель передаточной функции (1) на
cccma
3211
0
hcc
132
,
.
коэффициент 6a и получим передаточную функцию, записанную в виде:
sW
3
*
bs
3
4
*
as
4
*
2
bs
2
*
3
as
3
*
sb
1
2
as
*
2
.
sa
*
1
a
*
0
6
s
5
as
*
5
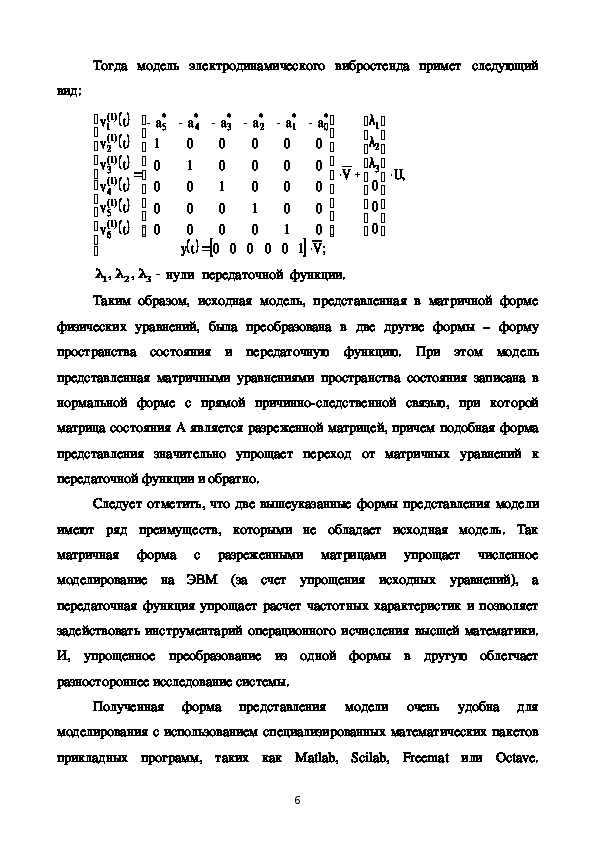
5Тогда модель электродинамического вибростенда примет следующий
вид:
*
5
a
1
0
0
0
0
*
4
a
0
1
0
0
0
ty
*
0
*
2
*
3
*
1
a
0
0
0
1
0
a
a
0
0
0
0
1
0
0
0
0
0
;V100000
a
0
0
0
0
1
V
λ
1
λ
2
λ
3
0
0
0
U,
t
t
t
t
t
t
(1)
v
1
(1)
v
2
(1)
v
3
(1)
v
4
(1)
v
5
(1)
v
6
λ,λ,λ
1
2
3
нули передаточной функции.
Таким образом, исходная модель, представленная в матричной форме
физических уравнений, была преобразована в две другие формы – форму
пространства состояния и передаточную функцию. При этом модель
представленная матричными уравнениями пространства состояния записана в
нормальной форме с прямой причинноследственной связью, при которой
матрица состояния А является разреженной матрицей, причем подобная форма
представления значительно упрощает переход от матричных уравнений к
передаточной функции и обратно.
Следует отметить, что две вышеуказанные формы представления модели
имеют ряд преимуществ, которыми не обладает исходная модель. Так
матричная форма с разреженными матрицами упрощает численное
моделирование на ЭВМ (за счет упрощения исходных уравнений), а
передаточная функция упрощает расчет частотных характеристик и позволяет
задействовать инструментарий операционного исчисления высшей математики.
И, упрощенное преобразование из одной формы в другую облегчает
разностороннее исследование системы.
Полученная форма представления модели очень удобна для
моделирования с использованием специализированных математических пакетов
Freemat или Octave.
прикладных программ, таких как Matlab,
Scilab,
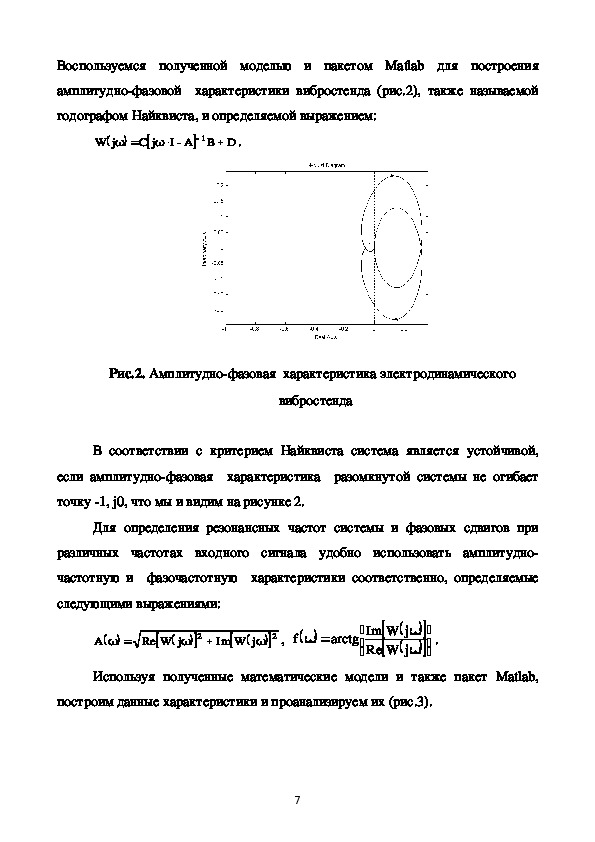
6Воспользуемся полученной моделью и пакетом Matlab для построения
амплитуднофазовой характеристики вибростенда (рис.2), также называемой
годографом Найквиста, и определяемой выражением:
jωW
jωC
DBAI
1
.
Рис.2. Амплитуднофазовая характеристика электродинамического
вибростенда
В соответствии с критерием Найквиста система является устойчивой,
если амплитуднофазовая характеристика разомкнутой системы не огибает
точку 1, j0, что мы и видим на рисунке 2.
Для определения резонансных частот системы и фазовых сдвигов при
различных частотах входного сигнала удобно использовать амплитудно
частотную и фазочастотную характеристики соответственно, определяемые
следующими выражениями:
ωA
jωWRe
2
jωWIm
2
,
ωf
arctg
jωWIm
jωWRe
.
Используя полученные математические модели и также пакет Matlab,
построим данные характеристики и проанализируем их (рис.3).
7Рис. 3. Частотные характеристики электродинамического вибростенда
(амплитудночастотная характеристика, фазочастотная характеристика)
На графике амплитудночастотной характеристики (рис. 3) частота
порядка 0,85 Гц является единственной резонансной для системы, что,
безусловно, необходимо учитывать при построении обратных связей. На
резонансной частоте ослабление сигнала составляет единицы децибел.
Из графика фазочастотной характеристики (рис. 3), видно, что знак фазы в
точке резонансной частоты меняется на противоположный, что свойственно
системам подобным этой, а так же, что в интересующем диапазоне частот это
единственная смена знака фазы, что в конечном итоге упрощает цепи обратных
связей, предназначенных для управления или стабилизации.
Проведем исследование электродинамического
вибростенда
во
временной области.
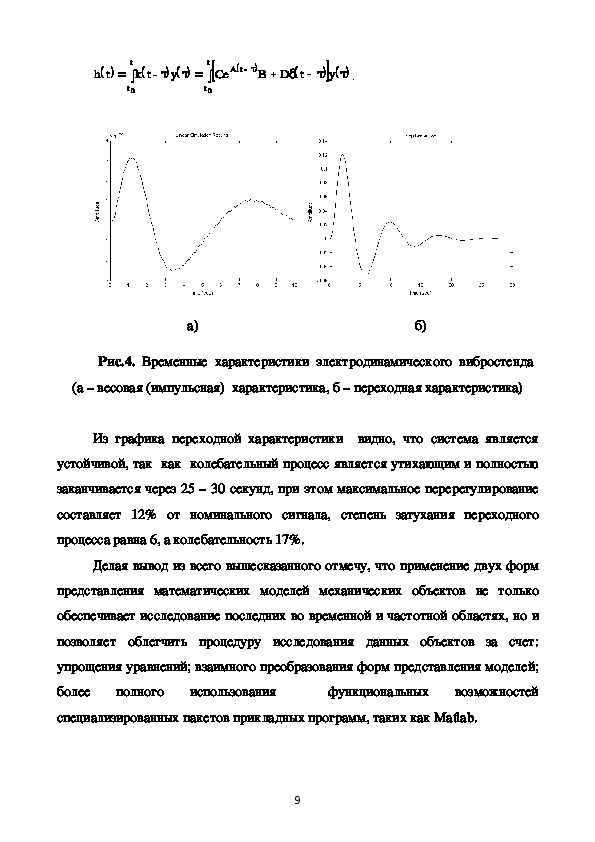
Весовая (импульсная) характеристика представлена на рис. 4,а, ее
аналитическое выражение:
τtk
τtA
B
Ce
τtDδ
.
На
рис. 4,б
представлена
переходная
характеристика
электродинамического вибростенда. Ее аналитическое выражение:
8
th
t
τyτtk
t
0
t
Ce
t
0
τtA
B
τyτtDδ
.
а) б)
Рис.4. Временные характеристики электродинамического вибростенда
(а – весовая (импульсная) характеристика, б – переходная характеристика)
Из графика переходной характеристики видно, что система является
устойчивой, так как колебательный процесс является утихающим и полностью
заканчивается через 25 – 30 секунд, при этом максимальное перерегулирование
составляет 12% от номинального сигнала, степень затухания переходного
процесса равна 6, а колебательность 17%.
Делая вывод из всего вышесказанного отмечу, что применение двух форм
представления математических моделей механических объектов не только
обеспечивает исследование последних во временной и частотной областях, но и
позволяет облегчить процедуру исследования данных объектов за счет:
упрощения уравнений; взаимного преобразования форм представления моделей;
функциональных возможностей
более полного использования
специализированных пакетов прикладных программ, таких как Matlab.
9