Поделиться

Методическая разработка открытого занятия
«Гонки на одномоторных шагоходах»
Направление: «Современный урок и внеурочная деятельность»
Ковязин Владимир Анатольевич,
Педагог дополнительного образования
Муниципальное бюджетное образовательное учреждение дополнительного образования детей
Страна: Россия
629300 ЯНАО г. Новый Уренгой
ул. Молодежная, 17-А
E-mail: kovyazin.70@mail.ru
т: 89124307079
Цели:
• проектирование и конструирование;
• поиск альтернативных творческих решений;
• развитие пространственных и математических представлений в процессе конструирования.
Задачи:
1) образовательная: формировать умения и навыки проектирования и конструирования;
2) развивающая: развивать конструкторские навыки, творческое воображение;
3) воспитательная: воспитывать трудолюбие и стремление добиваться выполнения поставленной задачи.
Оборудование: ПК, конструктор Lego Mindstorms EV3, поле для Икар-Старт 2019-2020.
Ход занятия
I. Организационный момент.
II. Повторение.
Блиц опрос.
1) Какой язык программирования используется в конструкторе Lego Mindstorms EV3?
2) Что такое цикл?
3) Какие виды циклов различают в среде программирования Mindstorms EV3?
4) С помощью какого пункта меню модуля Mindstorms EV3, можно отследить состояние датчиков вращения больших моторов?
5) Как правильно подключить к портам датчики и моторы в конструкторе Lego Mindstorms EV3?
6) Как перезагрузить модуль EV3, если он завис?
III. Знакомство с регламентом соревнований.
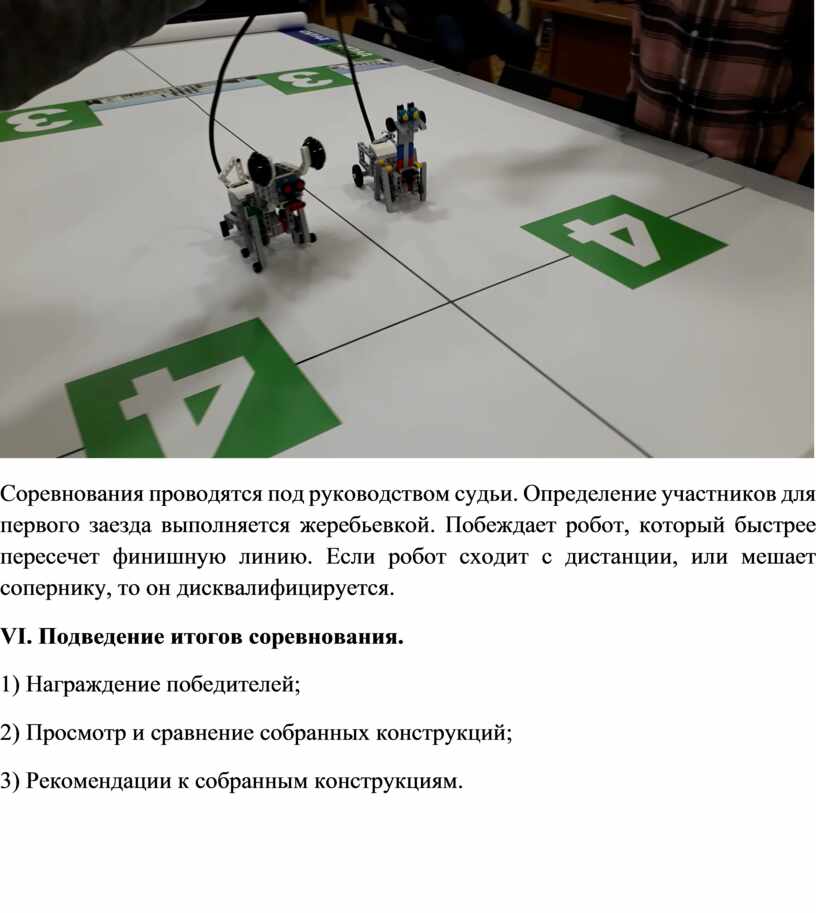
1) Поле для Икар-Старт 2019-2020. Количество заездов и участников.

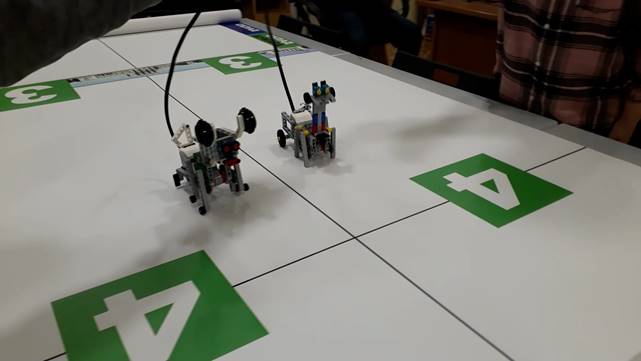
Для соревнований требуется фрагмент поля Икар-Старт, между 3 и 4 этапами. Длина соревновательной части фрагмента составляет 1 метр.
Количество заездов определяется судьёй. В одном заезде одновременно участвуют 2 робота. Роботов ставят перед линией старта (3 этап) и запускают по сигналу судьи в направлении финиша (4 этап). Они должны пересечь финишную линию задними колесами.
2) Требования к роботам.

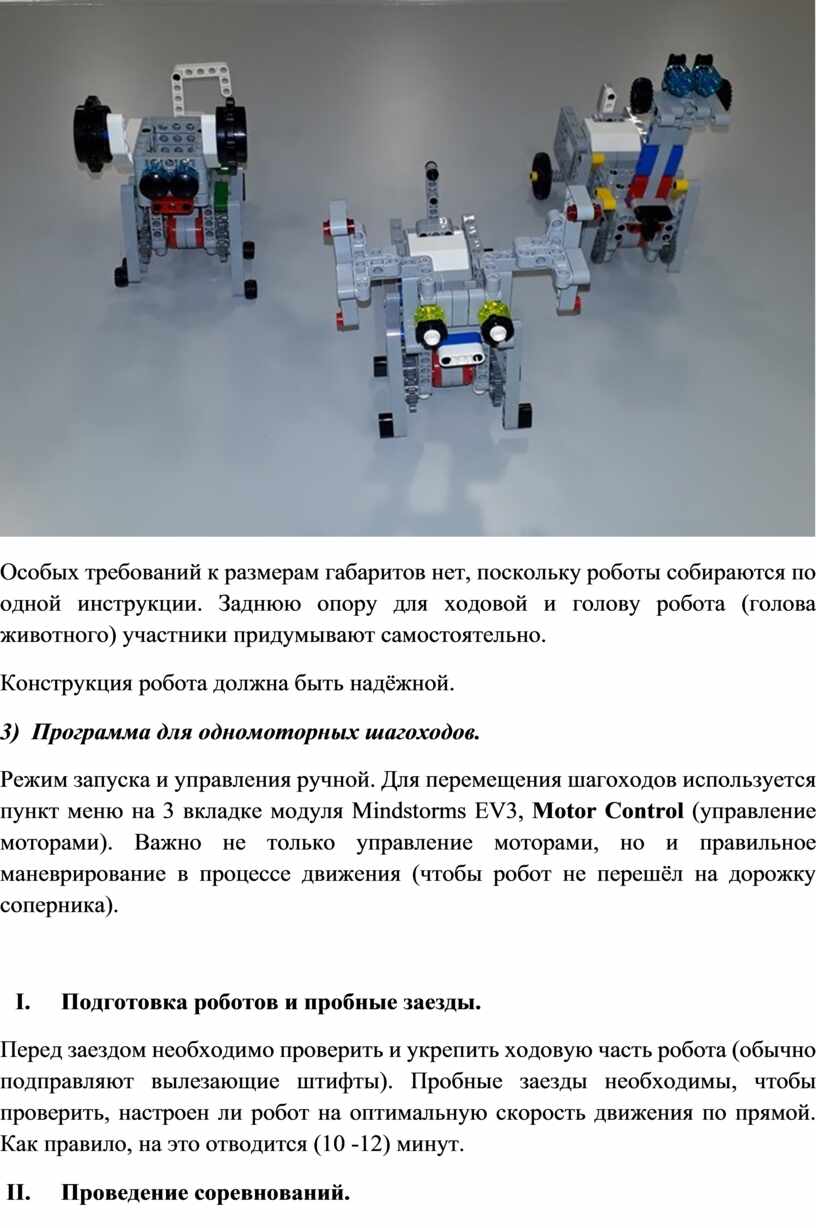
Особых требований к размерам габаритов нет, поскольку роботы собираются по одной инструкции. Заднюю опору для ходовой и голову робота (голова животного) участники придумывают самостоятельно.
Конструкция робота должна быть надёжной.
3) Программа для одномоторных шагоходов.
Режим запуска и управления ручной. Для перемещения шагоходов используется пункт меню на 3 вкладке модуля Mindstorms EV3, Motor Control (управление моторами). Важно не только управление моторами, но и правильное маневрирование в процессе движения (чтобы робот не перешёл на дорожку соперника).
IV. Подготовка роботов и пробные заезды.
Перед заездом необходимо проверить и укрепить ходовую часть робота (обычно подправляют вылезающие штифты). Пробные заезды необходимы, чтобы проверить, настроен ли робот на оптимальную скорость движения по прямой. Как правило, на это отводится (10 -12) минут.
V. Проведение соревнований.
Соревнования проводятся под руководством судьи. Определение участников для первого заезда выполняется жеребьевкой. Побеждает робот, который быстрее пересечет финишную линию. Если робот сходит с дистанции, или мешает сопернику, то он дисквалифицируется.
VI. Подведение итогов соревнования.
1) Награждение победителей;
2) Просмотр и сравнение собранных конструкций;
3) Рекомендации к собранным конструкциям.

Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
