

|
Муниципальное бюджетное общеобразовательное учреждение «Средняя школа № 5» |
||
|
«Рассмотрено» Руководитель ШМО _____________/ М.Г. Ковалькова /
Протокол № 4 от «26» мая 2022 г. |
«Рекомендовать к утверждению»
Педагогический совет
Протокол № 7 от «27» мая 2022 г. |
«Утверждено»
Директор МБОУ «СШ № 5»
Приказ № 348 от «30» мая 2022 г. |
РАБОЧАЯ ПРОГРАММА ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ
«ЗАНИМАТЕЛЬНАЯ РОБОТОТЕХНИКА»
Среднего общего образования
Класс: 5-8
Срок реализации: 2022-2023
Составитель: Подберезная Татьяна Юрьевна, учитель информатики
2022-2023 гг.
Рабочая программа внеурочной деятельности «Занимательная робототехника» составлена в соответствии с требованиями Федерального государственного общеобразовательного стандарта среднего общего образования, предназначена для обучающихся 5-8(х) классов МБОУ «СШ № 5», желающих расширить свои теоретические и практические навыки в области моделирования, конструирования, программирования, а также в области инженерного строительства.
Актуальность данной программы обосновывается широким распространением робототехники в окружающем нас мире: от лифта в доме до производства автомобилей, они повсюду. Конструктор LEGO Mindstorms приглашает ребят войти в увлекательный мир роботов, погрузиться в сложную среду информационных технологий.
Программное обеспечение NXT Mindstorms отличается дружественным интерфейсом, позволяющим ребенку постепенно превращаться из новичка в опытного пользователя.
Lego позволяет учащимся:
- совместно обучаться в рамках одной бригады;
- распределять обязанности в своей бригаде;
- проявлять повышенное внимание культуре и этике общения;
- проявлять творческий подход к решению поставленной задачи;
- создавать модели реальных объектов и процессов;
- видеть реальный результат своей работы.
Также в рамках региона введение робототехники, также является очень важным и далеко смотрящим проектам, способным развить и приумножить навыки и увлечения подрастающего поколения к инженерным специальностям, так как не один регион России, как Ямал не нуждается в сильных продуктивных и целеустремленных специалистах.
Цель курса:
развитие навыков начального технического конструирования с использованием оборудования LEGO и программирования в среде NXT-G и Robolab.
- Развитие творческого мышления при создании действующих моделей.
- Развитие словарного запаса и навыков общения при объяснении работы модели.
- Установление причинно-следственных связей.
- Анализ результатов и поиск новых решений.
- Коллективная выработка идей, упорство при реализации некоторых из них.
- Экспериментальное исследование, оценка (измерение) влияния отдельных факторов.
- Проведение систематических наблюдений и измерений.
- Использование таблиц для отображения и анализа данных.
- Построение трехмерных моделей по двухмерным чертежам.
- Логическое мышление и программирование заданного поведения модели.
- Написание и воспроизведение сценария с использованием модели для наглядности и драматургического эффекта.
Мотивация к изучению наук естественно-научного цикла: физики, информатики (программирование и автоматизированные системы управления) и математики.
Задачи курса:
- Организация занятости школьников во внеурочное время.
- Всестороннее развитие личности учащегося:
1. Ознакомление с основными принципами механики;
2. Ознакомление с основами программирования в компьютерной среде моделирования
LEGO Robolab и NXT-G;
3.Развитие умения работать по предложенным инструкциям;
4. Развитие умения творчески подходить к решению задачи;
5. Развитие умения довести решение задачи до работающей модели;
6. Развитие умения излагать мысли в четкой логической последовательности,
отстаивать свою точку зрения, анализировать ситуацию и самостоятельно находить
ответы на вопросы путем логических рассуждений.
7. Развитие умения работать над проектом в команде, эффективно распределять
обязанности.
8. Подготовка к соревнованиям по Лего-конструированию (соревнования «Кегель ринг», «Траектория», «Сумо», «Лабиринт» и тд.).
В процессе решения практических задач и поиска оптимальных решений школьники осваивают понятия баланса конструкции, ее оптимальной формы, прочности, устойчивости, жесткости и подвижности, а также передачи движения внутри конструкции. Изучая простые механизмы, дети учатся работать руками (развитие мелких и точных движений), развивают элементарное конструкторское мышление, фантазию.
Обучающая среда позволяет учащимся использовать и развивать навыки конкретного познания, строить новые знания на привычном фундаменте. В то же время новым для учащихся является работа над проектами. И хотя этапы работы над проектом отличаются от этапов, по которым идет работа над проектами в средней школе, но цели остаются теми же. В ходе работы над проектами дети начинают учиться работать с дополнительной литературой. Идет активная работа по обучению ребят анализу собранного материала и аргументации в правильности выбора данного материала. В ходе занятий повышается коммуникативная активность каждого ребенка, происходит развитие его творческих способностей. Повышается мотивация к учению. Занятия помогают в усвоении математических и логических задач, связанных с объемом и площадью, а также в усвоении других математических знаний, так как для создания проектов требуется провести простейшие расчеты и сделать чертежи. У учащихся, занимающихся конструированием, улучшается память, появляются положительные сдвиги в улучшении почерка (так как работа с мелкими деталями конструктора положительно влияет на мелкую моторику), речь становится более логической.
Образовательная система предлагает такие методики и такие решения, которые помогают становиться творчески мыслящими, обучают работе в команде. Эта система предлагает детям проблемы, дает в руки инструменты, позволяющие им найти своё собственное решение. Благодаря этому учащиеся испытывают удовольствие подлинного достижения.
Методическая основа курса – деятельный подход, т.е. организация максимально продуктивной творческой деятельности детей, начиная с первого класса.
Деятельность учащихся первоначально имеет, главным образом, индивидуальный характер. Но постепенно увеличивается доля коллективных работ, особенно творческих, обобщающего характера – проектов.
1. Наборы Лего - конструкторов:
2. Lego Mindstorms NXT – 15 наборов
3. Набор ресурсный средний – 4 набора
4. Программное обеспечение ПервоРобот NXT 2.0
5. Руководство пользователя ПервоРобот NXT 2.
6. Датчики освещённости – 15 шт.
7. Зарядные устройства – 15 шт.
8.АРМ учителя (компьютер, проектор, сканер, принтер)
- ОБЩАЯ ХАРАКТЕРИСТИКА КУРСА
Программа курса «Занимательная робототехника» предполагает построение занятий на принципах сотрудничества детей и взрослых, обеспечение роста творческого потенциала, обогащение форм взаимодействия со сверстниками и взрослыми в творческой деятельности.
В основе курса лежит целостный образ окружающего мира, который преломляется через результат деятельности учащихся. Конструирование как учебный предмет является комплексным и интегративным по своей сути, он предполагает реальные взаимосвязи практически со всеми предметами начальной школы.
Очень важным представляется тренировка работы в коллективе и развитие самостоятельного технического творчества. Простота в построении модели в сочетании с большими конструктивными возможностями конструктора позволяют детям в конце занятия увидеть сделанную своими руками модель, которая выполняет поставленную ими же самими задачу.
Преподавание курса предполагает использование компьютеров и специальных интерфейсных блоков совместно с конструкторами. Важно отметить, что компьютер используется как средство управления моделью; его использование направлено на составление управляющих алгоритмов для собранных моделей. Учащиеся получают представление об особенностях составления программ управления, автоматизации механизмов, моделировании работы систем.
Важно, что при этом ребенок сам строит свои знания, а учитель лишь
консультирует работу. В окружающем нас мире очень много роботов: от лифта в вашем доме до производства автомобилей, они повсюду. Конструктор LEGO Mindstorm приглашает ребят войти в увлекательный мир роботов, погрузиться в сложную среду информационных технологий.
Lego позволяет учащимся:
- совместно обучаться в рамках одной группе;
- распределять обязанности в своей группе;
- проявлять повышенное внимание культуре и этике общения;
- проявлять творческий подход к решению поставленной задачи;
- создавать модели реальных объектов и процессов;
- видеть реальный результат своей работы.
Программа составлена с расчетом 35 часов в год, 1 час в неделю.
- ОПИСАНИЕ МЕСТА КУРСА В ПЛАНЕ ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ
Курс творческой мастерской «Занимательная робототехника» реализуется в рамках общеинтеллектуального направления плана внеурочной деятельности для 5-х класс (40 минут; 1 раз в неделю; 35 часов за год), для 6-х класс (40 минут; 1 раз в неделю; 35 часов за год), для 7-х класс (40 минут; 1 раз в неделю; 35 часов за год), для 8-х класс (40 минут; 1 раз в неделю; 35 часов за год)
- ОПИСАНИЕ ЦЕННОСТНЫХ ОРИЕНТАЦИЙ СОДЕРЖАНИЯ КУРСА
Конструирование теснейшим образом связано с чувственным и интеллектуальным развитием ребенка. В процессе занятий идет работа над развитием интеллекта воображения, мелкой моторики, творческих задатков, развитие диалогической и монологической речи, расширение словарного запаса. Особое внимание уделяется развитию логического и пространственного мышления. Ученики учатся работать с предложенными инструкциями, формируются умения сотрудничать с партнером, работать в коллективе.
Различают три основных вида конструирования: по образцу, по условиям и по замыслу. Конструирование по образцу — когда есть готовая модель того, что нужно построить (например, изображение или схема). При конструировании по условиям — образца нет, задаются только условия, которым постройка должна соответствовать (например, домик для собачки должен быть маленьким, а для лошадки — большим). Конструирование по замыслу предполагает, что ребенок сам, без каких-либо внешних ограничений, создаст образ будущего сооружения и воплотит его в материале, который имеется в его распоряжении. Этот тип конструирования лучше остальных развивает творческие способности.
- РЕЗУЛЬТАТЫ ОСВОЕНИЯ КУРСА ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ.
Личностные результаты:
Наличие представлений об информации как важнейшем стратегическом ресурсе развития личности, государства, общества;
понимание роли информационных процессов в современном мире;
владение первичными навыками анализа и критичной оценки получаемой информации;
ответственное отношение к информации с учетом правовых и этических аспектов ее распространения;
развитие чувства личной ответственности за качество окружающей информационной среды;
способность увязать учебное содержание с собственным жизненным опытом, понять значимость подготовки в области информатики и ИКТ в условиях развития информационного общества;
готовность к повышению своего образовательного уровня и продолжению обучения с использованием средств и методов информатики и ИКТ;
способность и готовность к общению и сотрудничеству со сверстниками и взрослыми в процессе образовательной, общественно-полезной, учебно-исследовательской, творческой деятельности;
способность и готовность к принятию ценностей здорового образа жизни за счет знания основных гигиенических, эргономических и технических условий безопасной эксплуатации средств ИКТ.
Метапредметные результаты:
владение общепредметными понятиями «объект», «система», «модель», «алгоритм», «исполнитель» и др.;
владение информационно-логическими умениями: определять понятия, создавать обобщения, устанавливать аналогии, классифицировать, самостоятельно выбирать основания и критерии для классификации, устанавливать причинно-следственные связи, строить логическое рассуждение, умозаключение (индуктивное, дедуктивное и по аналогии) и делать выводы;
владение умениями самостоятельно планировать пути достижения целей; соотносить свои действия с планируемыми результатами, осуществлять контроль своей деятельности, определять способы действий в рамках предложенных условий, корректировать свои действия в соответствии изменяющейся ситуацией; оценивать правильность выполнения учебной задачи;
владение основами самоконтроля, самооценки, принятия решений и осуществления осознанного выбора в учебной и познавательной деятельности; владение основными универсальными умениями информационного характера: постановка и формулирование проблемы; поиск и выделение необходимой информации, применение методов информационного поиска; структурирование и визуализация информации; выбор наиболее эффективных способов решения задач в зависимости от конкретных условий; самостоятельное создание алгоритмов деятельности при решении проблем творческого и поискового характера;
владение информационным моделированием как основным методом приобретения знаний: умение преобразовывать объект из чувственной формы в пространственно-графическую или знаково-символическую модель; умение строить разнообразные информационные структуры для описания объектов; умение «читать» таблицы, графики, диаграммы, схемы и т.д., самостоятельно перекодировать информацию из одной знаковой системы в другую; умение выбирать
Ученик научится:
- правилам безопасной работы;
- основным компонентам конструкторов ЛЕГО;
- конструктивным особенностям различных моделей, сооружений и механизмов;
- выявлять особенности компьютерной среды, включающей в себя графический язык программирования;
- видам подвижных и неподвижных соединений в конструкторе;
- основным приемам конструирования роботов;
- определять конструктивные особенности различных роботов;
- особенностям передачи программы в RCX;
- использованию написанных программ;
- самостоятельному решению технических задач в процессе конструирования роботов (планирование предстоящих действий, самоконтроль, применять полученные знания, приемы и опыт конструирования с использованием специальных элементов, и других объектов и т.д.);
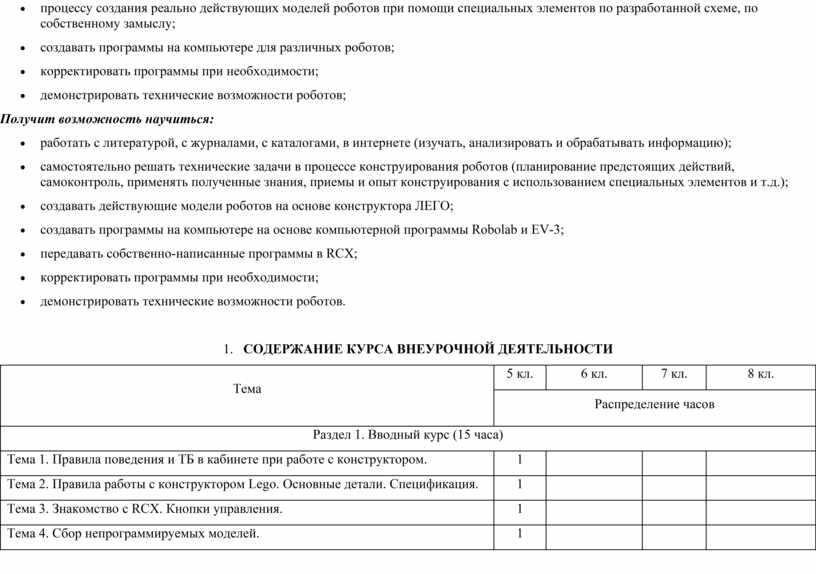
- процессу создания реально действующих моделей роботов при помощи специальных элементов по разработанной схеме, по собственному замыслу;
- создавать программы на компьютере для различных роботов;
- корректировать программы при необходимости;
- демонстрировать технические возможности роботов;
Получит возможность научиться:
- работать с литературой, с журналами, с каталогами, в интернете (изучать, анализировать и обрабатывать информацию);
- самостоятельно решать технические задачи в процессе конструирования роботов (планирование предстоящих действий, самоконтроль, применять полученные знания, приемы и опыт конструирования с использованием специальных элементов и т.д.);
- создавать действующие модели роботов на основе конструктора ЛЕГО;
- создавать программы на компьютере на основе компьютерной программы Robolab и EV-3;
- передавать собственно-написанные программы в RСX;
- корректировать программы при необходимости;
- демонстрировать технические возможности роботов.
- СОДЕРЖАНИЕ КУРСА ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ
|
Тема |
5 кл. |
6 кл. |
7 кл. |
8 кл. |
|||
|
Распределение часов |
|||||||
|
Раздел 1. Вводный курс (15 часа) |
|||||||
|
Тема 1. Правила поведения и ТБ в кабинете при работе с конструктором. |
1 |
||||||
|
Тема 2. Правила работы с конструктором Lego. Основные детали. Спецификация. |
1 |
||||||
|
Тема 3. Знакомство с RCX. Кнопки управления. |
1 |
||||||
|
Тема 4. Сбор непрограммируемых моделей. |
1 |
||||||
|
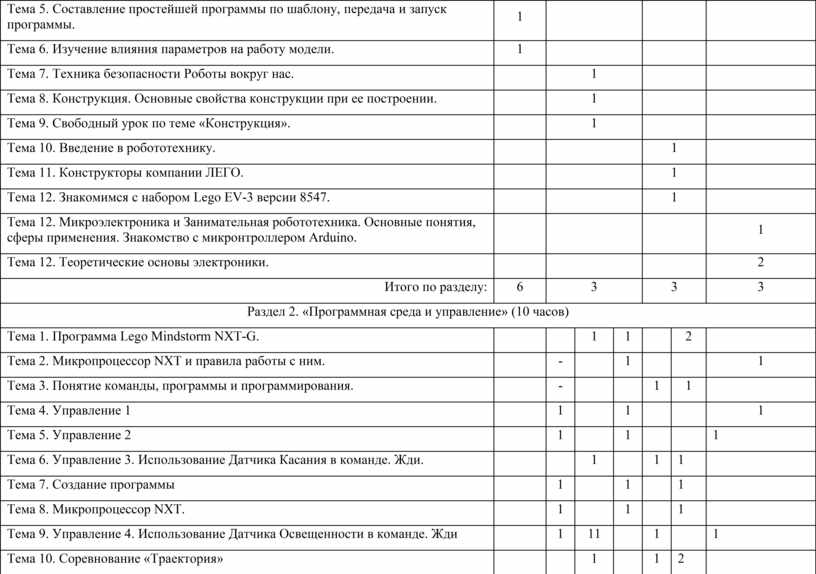
Тема 5. Составление простейшей программы по шаблону, передача и запуск программы. |
1 |
||||||
|
Тема 6. Изучение влияния параметров на работу модели. |
1 |
||||||
|
Тема 7. Техника безопасности Роботы вокруг нас. |
1 |
||||||
|
Тема 8. Конструкция. Основные свойства конструкции при ее построении. |
1 |
||||||
|
Тема 9. Свободный урок по теме «Конструкция». |
1 |
||||||
|
Тема 10. Введение в робототехнику. |
1 |
||||||
|
Тема 11. Конструкторы компании ЛЕГО. |
1 |
||||||
|
Тема 12. Знакомимся с набором Lego EV-3 версии 8547. |
1 |
||||||
|
Тема 12. Микроэлектроника и Занимательная робототехника. Основные понятия, сферы применения. Знакомство с микронтроллером Arduino. |
1 |
||||||
|
Тема 12. Теоретические основы электроники. |
2 |
||||||
|
Итого по разделу: |
6 |
3 |
3 |
3 |
|||
|
Раздел 2. «Программная среда и управление» (10 часов) |
|||||||
|
Тема 1. Программа Lego Mindstorm NXT-G. |
1 |
1 |
2 |
||||
|
Тема 2. Микропроцессор NXT и правила работы с ним. |
- |
1 |
1 |
||||
|
Тема 3. Понятие команды, программы и программирования. |
- |
1 |
1 |
||||
|
Тема 4. Управление 1 |
1 |
1 |
1 |
||||
|
Тема 5. Управление 2 |
1 |
1 |
1 |
||||
|
Тема 6. Управление 3. Использование Датчика Касания в команде. Жди. |
1 |
1 |
1 |
||||
|
Тема 7. Создание программы |
1 |
1 |
1 |
||||
|
Тема 8. Микропроцессор NXT. |
1 |
1 |
1 |
||||
|
Тема 9. Управление 4. Использование Датчика Освещенности в команде. Жди |
1 |
11 |
1 |
1 |
|||
|
Тема 10. Соревнование «Траектория» |
1 |
1 |
2 |
||||
|
Итого по разделу: |
10 |
10 |
12 |
||||
|
Раздел 3. Исследование и управление (5 часов) |
|||||||
|
Тема 1. Исследование. Управление 1 Датчика Освещенности |
1 |
1 |
2 |
||||
|
Тема 2. Исследование. Управление 2 |
1 |
1 |
1 |
||||
|
Тема 3. Микропроцессор NXT + конструктор LEGO + программа LEGO |
1 |
1 |
1 |
||||
|
Тема 4. Движение по траектории. |
1 |
1 |
1 |
||||
|
Тема 5. Соревнования «Движение по линии» |
1 |
1 |
1 |
||||
|
Итого по разделу: |
5 |
5 |
6 |
||||
|
Раздел 4. Конструирование (7 часов) |
|||||||
|
Тема 1. Конструирование 1. Управление двумя моторами с помощью команды «Жди». |
1 |
1 |
1 |
||||
|
Тема 2. Конструирование 2. Управление мощностью моторов. |
1 |
1 |
1 |
||||
|
Тема 3. Органы чувств робота. |
1 |
1 |
1 |
||||
|
Тема 4. Конструирование 3. Использование Датчика Освещенности в команде «Жди». |
1 |
1 |
1 |
||||
|
Тема 5. Конструирование 4. Программирование функций регистрации данных, основанное на планировании частоты отсчетов |
1 |
1 |
1 |
||||
|
Тема 6. Органы чувств робота. Датчик освещенности. |
1 |
1 |
1 |
||||
|
Тема 7. Проект Карусель. Использование автоматического управления. |
1 |
1 |
1 |
||||
|
Итого по разделу: |
7 |
7 |
7 |
||||
|
Раздел 5. Механизмы и датчики (10 часов) |
|||||||
|
Тема 1. Понятие о простых механизмах и их разновидностях. |
1 |
1 |
1 |
||||
|
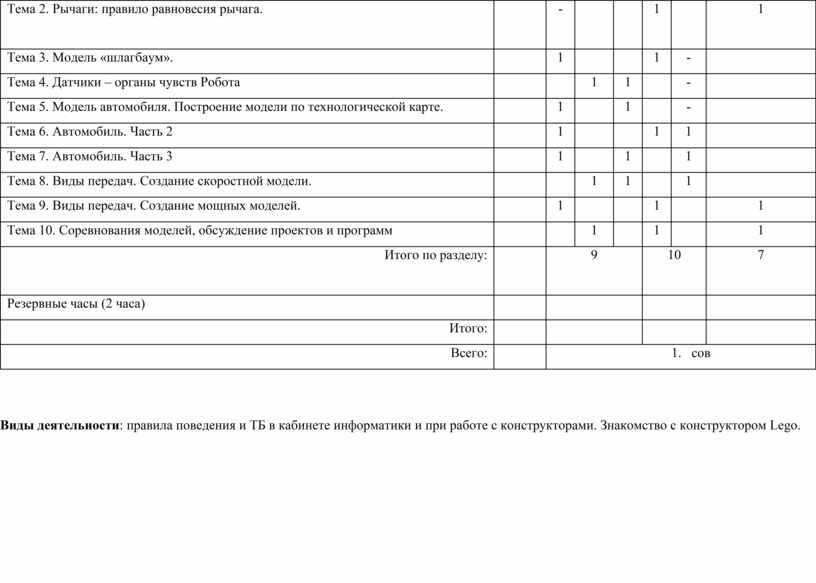
Тема 2. Рычаги: правило равновесия рычага. |
- |
1 |
1 |
||||
|
Тема 3. Модель «шлагбаум». |
1 |
1 |
- |
||||
|
Тема 4. Датчики – органы чувств Робота |
1 |
1 |
- |
||||
|
Тема 5. Модель автомобиля. Построение модели по технологической карте. |
1 |
1 |
- |
||||
|
Тема 6. Автомобиль. Часть 2 |
1 |
1 |
1 |
||||
|
Тема 7. Автомобиль. Часть 3 |
1 |
1 |
1 |
||||
|
Тема 8. Виды передач. Создание скоростной модели. |
1 |
1 |
1 |
||||
|
Тема 9. Виды передач. Создание мощных моделей. |
1 |
1 |
1 |
||||
|
Тема 10. Соревнования моделей, обсуждение проектов и программ |
1 |
1 |
1 |
||||
|
Итого по разделу: |
9 |
10 |
7 |
||||
|
Резервные часы (2 часа) |
|||||||
|
Итого: |
|||||||
|
Всего: |
|
||||||
Виды деятельности: правила поведения и ТБ в кабинете информатики и при работе с конструкторами. Знакомство с конструктором Lego.
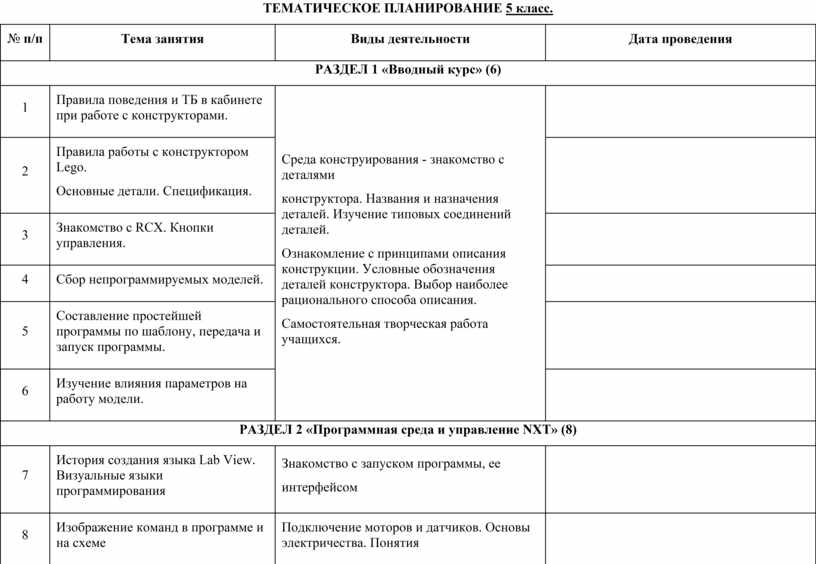
ТЕМАТИЧЕСКОЕ ПЛАНИРОВАНИЕ 5 класс.
|
№ п/п |
Тема занятия |
Виды деятельности |
Дата проведения |
|
РАЗДЕЛ 1 «Вводный курс» (6) |
|||
|
1 |
Правила поведения и ТБ в кабинете при работе с конструкторами. |
Среда конструирования - знакомство с деталями конструктора. Названия и назначения деталей. Изучение типовых соединений деталей. Ознакомление с принципами описания конструкции. Условные обозначения деталей конструктора. Выбор наиболее рационального способа описания. Самостоятельная творческая работа учащихся. |
|
|
2 |
Правила работы с конструктором Lego. Основные детали. Спецификация. |
|
|
|
3 |
Знакомство с RCX. Кнопки управления. |
|
|
|
4 |
Сбор непрограммируемых моделей. |
|
|
|
5 |
Составление простейшей программы по шаблону, передача и запуск программы. |
|
|
|
6 |
Изучение влияния параметров на работу модели. |
|
|
|
РАЗДЕЛ 2 «Программная среда и управление NXT» (8) |
|||
|
7 |
История создания языка Lab View. Визуальные языки программирования |
Знакомство с запуском программы, ее интерфейсом |
|
|
8 |
Изображение команд в программе и на схеме |
Подключение моторов и датчиков. Основы электричества. Понятия напряжения, полярности, электрической цепи. Техника безопасности. |
|
|
9 |
Понятие команды, программы и программирования. |
• Управление одним мотором • Использование команды жди • Загрузка программ в NXT |
|
|
10 |
Работа с пиктограммами, соединение команд |
|
|
|
11 |
Составления программы по шаблону |
• Управление двумя моторами • Изменение мощности мотора |
|
|
12 |
Передача и запуск программы |
• Создание двухступенчатых программ • Использование кнопки Выполнять много раз для повторения действий программы • Сохранение и загрузка программ |
|
|
13 |
Сборка модели с использованием мотора |
«Поворот на 90%» с использованием датчика касания (направо и налево) |
|
|
14 |
Линейная и циклическая программа. |
Микропроцессор NXT + конструктор LEGO + программа LEGO Mindstorm = LEGO-робот. |
|
|
РАЗДЕЛ 3 «Исследование и управление» (5) |
|||
|
15 |
Исследование. Управление 1 Датчика Освещенности |
• Проектирование сбора данных об освещенности с использованием • Обзор областей раздела Исследователь: Загрузка данных, Просмотр и Сравнение, Описание |
|
|
16 |
Исследование. Управление 2 |
|
|
|
17 |
Микропроцессор NXT + конструктор LEGO + программа LEGO |
• Проектирование сбора данных об освещенности в течение заданного времени • Программирование движения робота и сбора данных об освещенности |
|
|
18 |
Движение по траектории. |
Модель с одним и двумя датчиками света. Программирование. |
|
|
19 |
Соревнования «Движение по линии» |
Соревнование между группами, обсуждение проектов и программ |
|
|
РАЗДЕЛ 4 «Конструирование» (7) |
|||
|
20 |
Инфракрасный передатчик. Передача и запуск программы. |
• Использование палитры команд и окна Диаграммы • Использование палитры инструментов • Загрузка программ в NXT |
|
|
21 |
Модель «Выключатель света». Сборка модели. |
• Использование Модификаторов • Копирование и вставка пиктограмм в программе • Использование Датчика Касания в команде Жди • Сохранение программы |
|
|
22 |
Модель «Выключатель света». Сборка модели. |
Датчик света. Модели, реагирующие на изменение освещенности. |
|
|
23 |
Разработка и сбор собственных моделей. |
• Использование команд Прыжок и Метка • Загрузка ранее сохраненной программы |
|
|
24 |
Разработка и сбор собственных моделей. |
• Проектирование сбора данных от Датчика Освещенности • Программирование движения робота и сбора данных об освещенности • Смена графиков Обзор областей раздела Исследователь: Загрузка данных, Просмотр и Сравнение, Описание |
|
|
25 |
Разработка и сбор собственных моделей. |
Движение по траектории 1 датчик освещенности |
|
|
26 |
Демонстрация моделей |
Программирование вращения на заданное количество времени, автоматическое освещение, срабатывающее на уменьшение освещенности объекта. Разбиение на задачи. Прыжки. |
|
|
РАЗДЕЛ 5 «Механизмы и датчики» (9) |
|||
|
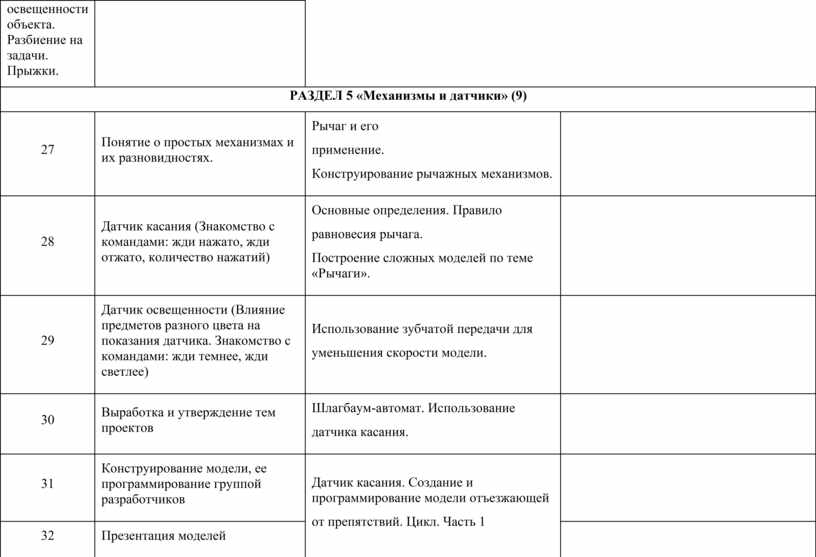
27 |
Понятие о простых механизмах и их разновидностях. |
Рычаг и его применение. Конструирование рычажных механизмов. |
|
|
28 |
Датчик касания (Знакомство с командами: жди нажато, жди отжато, количество нажатий) |
Основные определения. Правило равновесия рычага. Построение сложных моделей по теме «Рычаги». |
|
|
29 |
Датчик освещенности (Влияние предметов разного цвета на показания датчика. Знакомство с командами: жди темнее, жди светлее) |
Использование зубчатой передачи для уменьшения скорости модели. |
|
|
30 |
Выработка и утверждение тем проектов |
Шлагбаум-автомат. Использование датчика касания. |
|
|
31 |
Конструирование модели, ее программирование группой разработчиков |
Датчик касания. Создание и программирование модели отъезжающей от препятствий. Цикл. Часть 1 |
|
|
32 |
Презентация моделей |
|
|
|
33 |
Выставка |
|
|
|
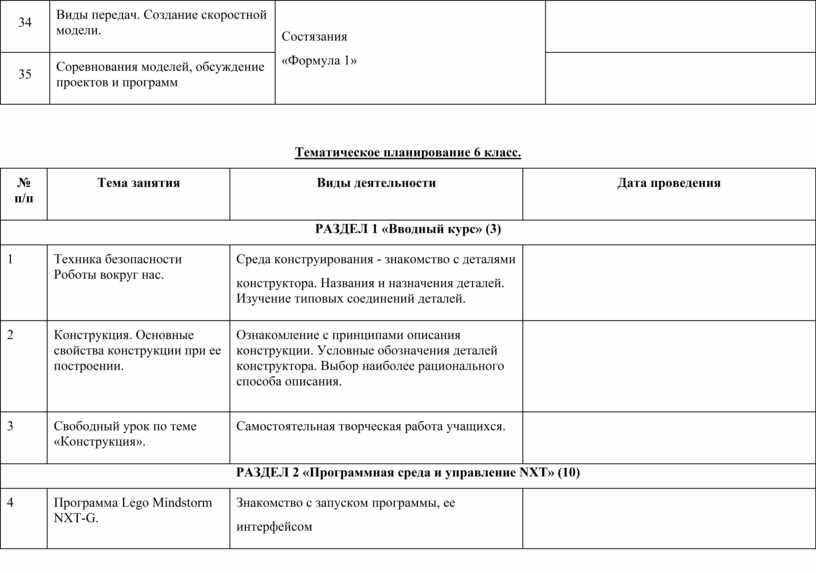
34 |
Виды передач. Создание скоростной модели. |
Состязания «Формула 1» |
|
|
35 |
Соревнования моделей, обсуждение проектов и программ |
|
|
Тематическое планирование 6 класс.
|
№ п/п |
Тема занятия |
Виды деятельности |
Дата проведения |
|
РАЗДЕЛ 1 «Вводный курс» (3) |
|||
|
1 |
Техника безопасности Роботы вокруг нас. |
Среда конструирования - знакомство с деталями конструктора. Названия и назначения деталей. Изучение типовых соединений деталей. |
|
|
2 |
Конструкция. Основные свойства конструкции при ее построении. |
Ознакомление с принципами описания конструкции. Условные обозначения деталей конструктора. Выбор наиболее рационального способа описания. |
|
|
3 |
Свободный урок по теме «Конструкция». |
Самостоятельная творческая работа учащихся. |
|
|
РАЗДЕЛ 2 «Программная среда и управление NXT» (10) |
|||
|
4 |
Программа Lego Mindstorm NXT-G. |
Знакомство с запуском программы, ее интерфейсом |
|
|
5 |
Микропроцессор NXT и правила работы с ним. |
Подключение моторов и датчиков. Основы электричества. Понятия напряжения, полярности, электрической цепи. Техника безопасности. |
|
|
6 |
Понятие команды, программы и программирования. |
|
|
|
7 |
Управление 1 |
• Управление одним мотором • Использование команды жди • Загрузка программ в NXT |
|
|
8 |
Управление 2 |
• Управление двумя моторами • Изменение мощности мотора |
|
|
9 |
Управление 3 • Использование Датчика Касания в команде Жди |
• Создание двухступенчатых программ • Использование кнопки Выполнять много раз для повторения действий программы • Сохранение и загрузка программ |
|
|
10 |
Создание программы |
«Поворот на 90%» с использованием датчика касания (направо и налево) |
|
|
11 |
Микропроцессор NXT. |
Микропроцессор NXT + конструктор LEGO + программа LEGO Mindstorm = LEGO-робот. |
|
|
12 |
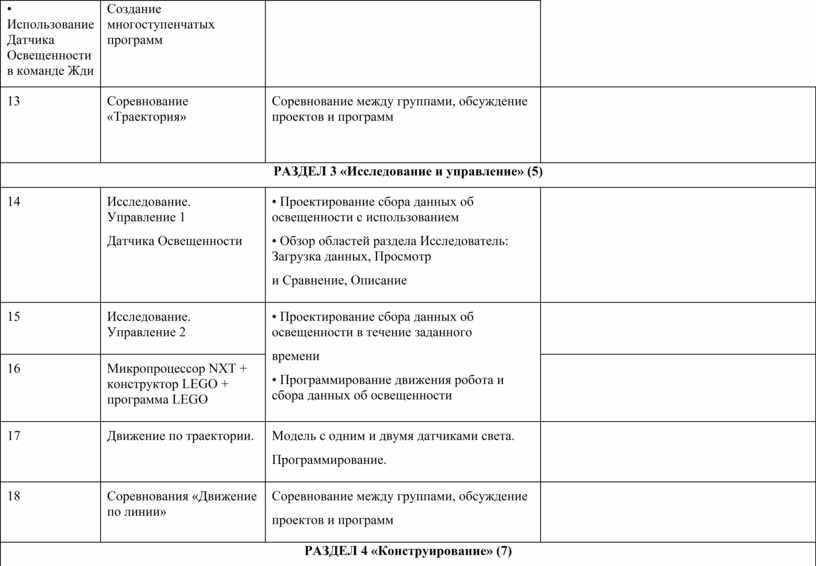
Управление 4 • Использование Датчика Освещенности в команде Жди |
Создание многоступенчатых программ |
|
|
13 |
Соревнование «Траектория» |
Соревнование между группами, обсуждение проектов и программ |
|
|
РАЗДЕЛ 3 «Исследование и управление» (5) |
|||
|
14 |
Исследование. Управление 1 Датчика Освещенности |
• Проектирование сбора данных об освещенности с использованием • Обзор областей раздела Исследователь: Загрузка данных, Просмотр и Сравнение, Описание |
|
|
15 |
Исследование. Управление 2 |
• Проектирование сбора данных об освещенности в течение заданного времени • Программирование движения робота и сбора данных об освещенности |
|
|
16 |
Микропроцессор NXT + конструктор LEGO + программа LEGO |
|
|
|
17 |
Движение по траектории. |
Модель с одним и двумя датчиками света. Программирование. |
|
|
18 |
Соревнования «Движение по линии» |
Соревнование между группами, обсуждение проектов и программ |
|
|
РАЗДЕЛ 4 «Конструирование» (7) |
|||
|
19 |
Конструирование 1. Управление двумя моторами с помощью команды Жди |
• Использование палитры команд и окна Диаграммы • Использование палитры инструментов • Загрузка программ в NXT |
|
|
20 |
Конструирование 2. Управление мощностью моторов. |
• Использование Модификаторов • Копирование и вставка пиктограмм в программе • Использование Датчика Касания в команде Жди • Сохранение программы |
|
|
21 |
Органы чувств робота. |
Датчик света. Модели, реагирующие на изменение освещенности. |
|
|
22 |
Конструирование 3. Использование Датчика Освещенности в команде Жди |
• Использование команд Прыжок и Метка • Загрузка ранее сохраненной программы |
|
|
23 |
Конструирование 4. Программирование функций регистрации данных, основанное на планировании частоты отсчетов |
• Проектирование сбора данных от Датчика Освещенности • Программирование движения робота и сбора данных об освещенности • Смена графиков Обзор областей раздела Исследователь: Загрузка данных, Просмотр и Сравнение, Описание |
|
|
24 |
Органы чувств робота. Датчик освещенности. |
Движение по траектории 1 датчик освещенности |
|
|
25 |
Проект Карусель. Использование автоматического управления. |
Программирование вращения на заданное количество времени, автоматическое освещение, срабатывающее на уменьшение освещенности объекта. Разбиение на задачи. Прыжки. |
|
|
РАЗДЕЛ 5 «Механизмы и датчики» (10) |
|||
|
26 |
Понятие о простых механизмах и их разновидностях. |
Рычаг и его применение. Конструирование рычажных механизмов. |
|
|
27 |
Рычаги: правило равновесия рычага. |
Основные определения. Правило равновесия рычага. Построение сложных моделей по теме «Рычаги». |
|
|
28 |
Модель «шлагбаум». |
Использование зубчатой передачи для уменьшения скорости модели. |
|
|
29 |
Датчики – органы чувств Робота. |
Шлагбаум-автомат. Использование датчика касания. |
|
|
30 |
Модель автомобиля. Построение модели по технологической карте. |
Датчик касания. Создание и программирование модели отъезжающей от препятствий. Цикл. Часть 1 |
|
|
31 |
Автомобиль. Часть 2 |
|
|
|
32 |
Автомобиль. Часть 3 |
|
|
|
33 |
Виды передач. Создание скоростной модели. |
|
|
|
34 |
Виды передач. Создание мощных моделей. |
Состязания «Перетягивание каната» Зачет по теме «Виды передач» |
|
|
35 |
Соревнования моделей, обсуждение проектов и программ |
|
|
Календарно-тематическое планирование 7 класс.
|
№ п/п |
Тема занятия |
Виды деятельности |
Дата проведения |
|
РАЗДЕЛ 1 «Вводный курс» (3) |
|||
|
1 |
Введение в робототехнику |
Лекция. Цели и задачи курса. Что такое роботы. Ролики, фотографии и мультимедиа. Рассказ о соревнованиях роботов: Евробот, фестиваль мобильных роботов, олимпиады роботов. Спортивная Занимательная робототехника. В т.ч. - бои роботов (неразрушающие). Конструкторы и «самодельные» роботы. |
|
|
2 |
Конструкторы компании ЛЕГО |
|
|
|
3 |
Знакомимся с набором Lego EV-3 версии 8547 |
Самостоятельная творческая работа учащихся. |
|
|
РАЗДЕЛ 2 «Программная среда и управление NXT» (12) |
|||
|
4-5 |
Собираем по инструкции робота-сумоиста |
Собираем, запоминаем конструкцию. Тестируем собранного робота. Управляем им с ноутбука/нетбука. |
|
|
6 |
Соревнование "роботов-сумоистов" |
Необходимо изучить конструкции, выявить плюсы и минусы бота. |
|
|
7 |
Анализ конструкции победителей |
Все задания раскалываем по частям, например, нужно передвигаться из точки А в точку Б - это будет первая задача, нужно определять цвет каждой ячейки - это вторая задача, в зависимости от цвета ячейки нужно выкладывать определённое количество шариков в ячейку - это третья задача. |
|
|
8-9 |
Конструируем робота к школьным и городским соревнованиям WRO |
|
|
|
10 |
Собираем робота-богомола |
|
|
|
11 |
Программируем робота-богомола |
|
|
|
12 |
Собираем робота высокой сложности |
Сборка робота АЛЬФАРЕКСА (ALFAREX) Программируем робота АЛЬФАРЕКСА, готовимся к показательным выступлениям. Создание многоступенчатых программ |
|
|
13 |
Собираем робота высокой сложности «Конвейер-сортировщик» |
|
|
|
14 |
Программируем робота высокой сложности «Конвейер-сортировщик» |
|
|
|
15 |
Показательное выступление |
Соревнование между группами, обсуждение проектов и программ |
|
|
РАЗДЕЛ 3 «Исследование и управление» (6) |
|||
|
16-17 |
Разработка проектов по группам |
• Проектирование сбора данных об освещенности с использованием • Обзор областей раздела Исследователь: Загрузка данных, Просмотр и Сравнение, Описание |
|
|
18 |
Свободный урок. Сбор готовой модели на выбор |
• Проектирование сбора данных об освещенности в течение заданного времени • Программирование движения робота и сбора данных об освещенности |
|
|
19 |
Конструируем 4-х колёсного или гусеничного робота |
|
|
|
20-21 |
Конструируем колёсного или гусеничного робота. Программирование. |
Модель с одним и двумя датчиками света. Программирование. |
|
|
РАЗДЕЛ 4 «Конструирование» (7) |
|||
|
22 |
Конструирование первого робота |
• Использование палитры команд и окна Диаграммы • Использование палитры инструментов • Загрузка программ в NXT |
|
|
23 |
Изучение среды управления и программирования |
• Использование Модификаторов • Копирование и вставка пиктограмм в программе • Использование Датчика Касания в команде Жди • Сохранение программы |
|
|
24 |
Программирование робота |
Датчик света. Модели, реагирующие на изменение освещенности. |
|
|
25 |
Конструируем более сложного робота |
• Использование команд Прыжок и Метка • Загрузка ранее сохраненной программы |
|
|
26 |
Программирование более сложного робота |
• Проектирование сбора данных от Датчика Освещенности • Программирование движения робота и сбора данных об освещенности • Смена графиков Обзор областей раздела Исследователь: Загрузка данных, Просмотр и Сравнение, Описание |
|
|
27 |
Собираем гусеничного робота по инструкции |
Движение по траектории 1 датчик освещенности |
|
|
28 |
Конструируем гусеничного бота. Демонстрация результатов. |
Программирование вращения на заданное количество времени, автоматическое освещение, срабатывающее на уменьшение освещенности объекта. Разбиение на задачи. Прыжки. |
|
|
РАЗДЕЛ 5 «Механизмы и датчики» (7) |
|||
|
29 |
Свободное моделирование |
Собираем любую по желанию модель. |
|
|
30 |
Свободное моделирование, программирование |
Собираем любую по желанию модель. Резервный урок. |
|
|
31 |
Компьютерное моделирование робота сортировщика. |
Использование зубчатой передачи для уменьшения скорости модели. |
|
|
32 |
Сборка робота-сортировщика по компьютерной модели. |
Показательный урок: демонстрируем робота, запускаем программу, показываем возможности движения, соревнуемся на скорость перемещения. Команда-победитель получает призы. |
|
|
33 |
Программирование робота-сортировщика. |
|
|
|
34 |
Подготовка к соревнованиям. |
|
|
|
35 |
Квалификационно, показательные соревнования. |
|
|
Календарно-тематическое планирование 8 класс.
|
№ п/п |
Тема занятия |
Краткое содержание занятия |
Дата проведения |
|
РАЗДЕЛ 1 «Основные понятия микроэлектроники» (3) |
|||
|
1 |
Микроэлектроника и Занимательная робототехника. Основные понятия, сферы применения. Знакомство с микронтроллером Arduino. |
Роль микроэлектроники на современном этапе развития общества. Основные понятия микроэлектроники. Структура и состав контроллера Arduino. Среда программирования. Техника безопасности. Управление электричеством. Законы электричества. Как быстро строить схемы: макетная плата. Чтение электрических схем. Управление светодиодом. Мультиметр. Электронные измерения. |
|
|
2-3 |
Теоретические основы электроники. |
|
|
|
РАЗДЕЛ 2 «Основные принципы программирования микроконтроллеров» (7) |
|||
|
4 |
Программирование Arduino |
Подпрограммы: назначение, описание и вызов. Параметры, локальные и глобальные переменные. Логические конструкции. Функция и ее аргументы. Создание собственных функций и их использование. |
|
|
5-6 |
Логические переменные и конструкции |
Особенности подключения кнопки. Устранение шумов с помощью стягивающих и подтягивающих резисторов. Программное устранение дребезга. Булевые переменные и константы, логические операции. |
|
|
7-8 |
Аналоговые и цифровые входы и выходы. Принципы их использования |
Аналоговые и цифровые сигналы, понятие ШИМ. Управление устройствами с помощью портов, поддерживающих ШИМ. Циклические конструкции, датчик случайных чисел. Использование датчика в программировании Arduino. |
|
|
9-10 |
Понятие массива. Массивы символов. Пьезоэффект. Управление звуком. |
|
|
|
РАЗДЕЛ 3 «Датчики для микроконтроллера» (5) |
|||
|
11-12 |
Сенсоры. Датчики Arduino. |
Роль сенсоров в управляемых системах. Сенсоры и переменные резисторы. Делитель напряжения. Потенциометр. Аналоговые сигналы на входе Arduino. Использование монитора последовательного порта для наблюдений за параметрами системы. |
|
|
13-14 |
Подключение различных датчиков к Arduino |
Датчики сердцебиения, лазер. Датчик дождя (влаги). Датчик окиси углерода. Датчики температуры и влажности dht11 и dht22. Датчик давления. Датчик холла. Датчики пара, пламени, освещенности, звука, влажности почвы, наклона и др. |
|
|
15 |
Промежуточная аттестация по пройденному материалу |
Задания по сборке схем + программированию, теоретическим знаниям по электронике. |
|
|
РАЗДЕЛ 4 «Практическое применение микроконтроллеров» (12) |
|||
|
16-17 |
Цифровые индикаторы. Применение массивов |
Назначение, устройство, принципы действия семисегментного индикатора. Управление. Массив данных. Электронные часы |
|
|
18-19 |
Работа со звуком |
Пьезопищалка. Частота звука. Подключение пьезоизлучателя (Buzzer), изучение команды tone(). Воспроизведение простых мелодий, например, на основе примеров toneMelody. Управление звуками аналоговым входом tonePitchFollower. Пианино (несколько обычных кнопок, при нажатии – одной – своя нота) |
|
|
20 |
Библиотеки |
Что такое библиотеки. Использование библиотек в программе. Установка, создание библиотек. Библиотека math.h. Использование математических функций в программе. |
|
|
21-22 |
LCD-экраны (жидкокристаллические экраны) Управление микроконтроллерами через USB |
Жидкокристаллический экран (ЖК-экран). Характеристики. Подключение символьного дисплея к микроконтроллеру. Основные команды для вывода информации на экран. Бегущая строка. Вывод на экран информации с датчиков из предыдущих занятий. Использование Serial Monitor для передачи текстовых сообщений на Arduino. Преобразование текстовых сообщений в команды. Программирование: объекты, объект String, цикл while, оператор выбора case. |
|
|
23-24 |
Двигатели. Типы. Управление двигателями. |
Движение объектов. Постоянные двигатели. Шаговые двигатели. Серводвигатели. Транзисторы. Основы управления сервоприводом. Драйвер мотора. Скорость вращения мотора, изменение направления вращения. Библиотека servo.h |
|
|
25 |
Регистрация данных на SD и Micro-SD карты. |
Запись данных на SD и Micro-SD карты. Чтение datasheet. |
|
|
26-27 |
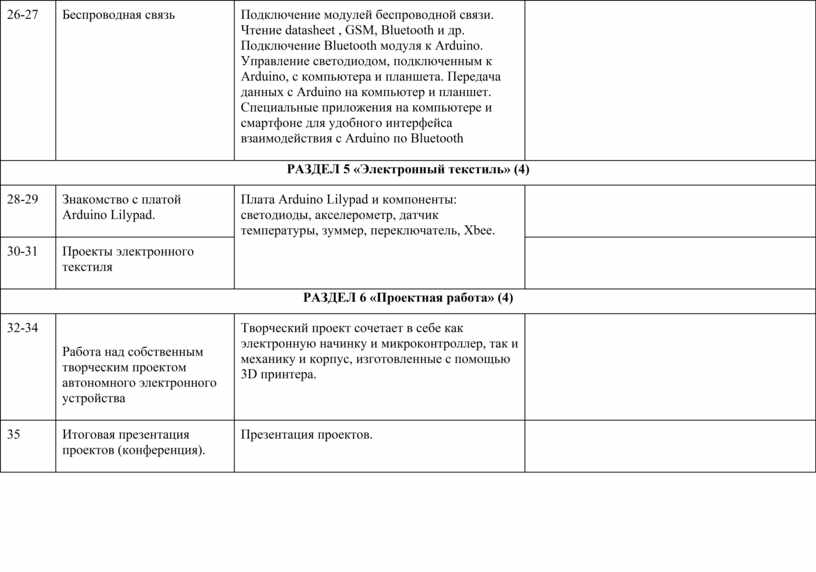
Беспроводная связь |
Подключение модулей беспроводной связи. Чтение datasheet , GSM, Bluetooth и др. Подключение Bluetooth модуля к Arduino. Управление светодиодом, подключенным к Arduino, с компьютера и планшета. Передача данных с Arduino на компьютер и планшет. Специальные приложения на компьютере и смартфоне для удобного интерфейса взаимодействия с Arduino по Bluetooth |
|
|
РАЗДЕЛ 5 «Электронный текстиль» (4) |
|||
|
28-29 |
Знакомство с платой Arduino Lilypad. |
Плата Arduino Lilypad и компоненты: светодиоды, акселерометр, датчик температуры, зуммер, переключатель, Xbee. |
|
|
30-31 |
Проекты электронного текстиля |
|
|
|
РАЗДЕЛ 6 «Проектная работа» (4) |
|||
|
32-34 |
Работа над собственным творческим проектом автономного электронного устройства |
Творческий проект сочетает в себе как электронную начинку и микроконтроллер, так и механику и корпус, изготовленные с помощью 3D принтера. |
|
|
35 |
Итоговая презентация проектов (конференция). |
Презентация проектов. |
|
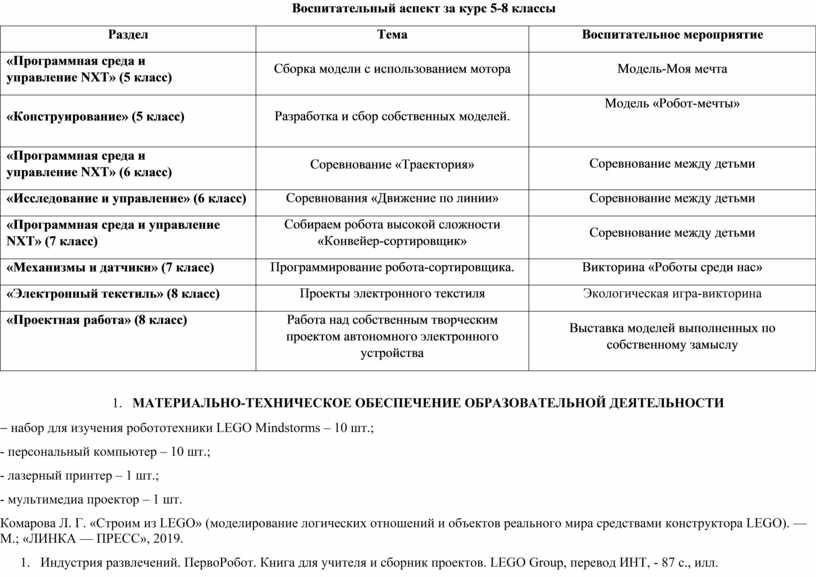
Воспитательный аспект за курс 5-8 классы
|
Раздел |
Тема |
Воспитательное мероприятие |
|
«Программная среда и управление NXT» (5 класс) |
Сборка модели с использованием мотора |
Модель-Моя мечта |
|
«Конструирование» (5 класс) |
Разработка и сбор собственных моделей. |
Модель «Робот-мечты»
|
|
«Программная среда и управление NXT» (6 класс) |
Соревнование «Траектория» |
Соревнование между детьми |
|
«Исследование и управление» (6 класс) |
Соревнования «Движение по линии» |
Соревнование между детьми |
|
«Программная среда и управление NXT» (7 класс) |
Собираем робота высокой сложности «Конвейер-сортировщик» |
Соревнование между детьми |
|
«Механизмы и датчики» (7 класс) |
Программирование робота-сортировщика. |
Викторина «Роботы среди нас» |
|
«Электронный текстиль» (8 класс) |
Проекты электронного текстиля |
Экологическая игра-викторина |
|
«Проектная работа» (8 класс) |
Работа над собственным творческим проектом автономного электронного устройства |
Выставка моделей выполненных по собственному замыслу |
- МАТЕРИАЛЬНО-ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ОБРАЗОВАТЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ
- набор для изучения робототехники LEGO Mindstorms – 10 шт.;
- персональный компьютер – 10 шт.;
- лазерный принтер – 1 шт.;
- мультимедиа проектор – 1 шт.
Комарова Л. Г. «Строим из LEGO» (моделирование логических отношений и объектов реального мира средствами конструктора LEGO). — М.; «ЛИНКА — ПРЕСС», 2019.
- Индустрия развлечений. ПервоРобот. Книга для учителя и сборник проектов. LEGO Group, перевод ИНТ, - 87 с., илл.
- Наборы образовательных Лего-конструкторов:
- Индустрия развлечений. ПервоРобот. В наборе: 216 ЛЕГО-элементов, включая RCX-блок и ИК передатчик, датчик освещенности, 2 датчика касания, 2 мотора 9 В.
- Автоматизированные устройства. ПервоРобот. В наборе: 828 ЛЕГО-элементов, включая Лего-компьютер RCX, инфракрасный передатчик, 2 датчика освещенности, 2 датчика касания, 2 мотора 9 В.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ ДЛЯ УЧИТЕЛЯ
- Глинский Б. А. Моделирование как метод научного исследования. — М.: 2020.
- Техническое творчество. Программы для внешкольных учреждений и общеобразовательных школ. — М.: Просвещение, 2019.
- Программа образовательной области «Технология». — М.: ВННК «Технология», 2020
- Вонг У. Основы программирования для «чайников» (+CD-ROM). — Киев: Диалектика, 2020. — 336 с/
- http://www.membrana.ru. Люди. Идеи. Технологии.
- http://www.3dnews.ru. Ежедневник цифровых технологий.
- http://www.all-robots.ru Роботы и Занимательная робототехника.
- http://www.ironfelix.ru Железный Феликс. Домашнее роботостроение.
- http://www.roboclub.ru РобоКлуб. Практическая Занимательная робототехника.
- http://www.robot.ru Портал Robot.Ru Занимательная робототехника и Образование.
- http://www.rusandroid.ru. Серийные андроидные роботы в России.
Муниципальное бюджетное общеобразовательное учреждение «Средняя школа № 5» «Рассмотрено»
Рабочая программа внеурочной деятельности «Занимательная робототехника» составлена в соответствии с требованиями
Коллективная выработка идей, упорство при реализации некоторых из них
Повышается мотивация к учению
Очень важным представляется тренировка работы в коллективе и развитие самостоятельного технического творчества
Конструирование теснейшим образом связано с чувственным и интеллектуальным развитием ребенка
Ученик научится: правилам безопасной работы; основным компонентам конструкторов
Получит возможность научиться: работать с литературой, с журналами, с каталогами, в интернете (изучать, анализировать и обрабатывать информацию); самостоятельно решать технические задачи в процессе конструирования роботов…
Тема 5. Составление простейшей программы по шаблону, передача и запуск программы
Итого по разделу: 101012
Тема 2. Рычаги: правило равновесия рычага
ТЕМАТИЧЕСКОЕ ПЛАНИРОВАНИЕ 5 класс
Техника безопасности. 9Понятие команды, программы и программирования
Проектирование сбора данных об освещенности с использованием •
Использование Датчика Касания в команде
Разбиение на задачи. Прыжки.
Виды передач. Создание скоростной модели
Микропроцессор NXT и правила работы с ним
Использование Датчика Освещенности в команде
Конструирование 1. Управление двумя моторами с помощью команды
Сравнение, Описание 24
Модель автомобиля. Построение модели по технологической карте
Знакомимся с набором Lego EV-3 версии 8547
Программируем робота высокой сложности «Конвейер-сортировщик» 15Показательное выступлениеСоревнование между группами, обсуждение проектов и программ
Использование палитры инструментов •
Конструируем гусеничного бота.
Календарно-тематическое планирование 8 класс
Использование датчика в программировании
БиблиотекиЧто такое библиотеки
Беспроводная связь Подключение модулей беспроводной связи
Воспитательный аспект за курс 5-8 классы
Наборы образовательных Лего-конструкторов:
© ООО «Знанио»
С вами с 2009 года.
![]()