Поделиться

Министерство образования, науки и молодежи Республики Крым
Государственное бюджетное профессиональное
образовательное учреждение Республики Крым
«Симферопольский политехнический колледж»
Методическая разработка
открытого занятия
по дисциплине ОП.12«Основы автоматики и КИП»
Тема: «Классификация автоматических регуляторов»
специальность: 15.02.06 Монтаж и техническая эксплуатация холодильно-компрессорных машин и установок (по отраслям)
Разработал: Куршутов Д.С.
преподаватель
Симферополь, 2019
Методическая разработка открытого занятия по дисциплине «ОП. 12 Основы автоматики и КИП» подготовил Куршутов Д.С. преподаватель, 2019г.
Рецензенты:
РАССМОТРЕНА И ОДОБРЕНА
цикловой методической комиссией
__технических дисциплин_______________
наименование ЦМК
(протокол от « » августа 2019г. № )
Председатель ЦМК ___________ И.И. Золотарев
подпись Инициалы, фамилия
СОДЕРЖАНИЕ
1. Пояснительная записка.
2. План открытого занятия.
3. Список использованных источников: (список использованной литературы и Интернет источников).
4. Приложения.
Пояснительная записка. Данное открытое занятие входит в состав дисциплины ОП 12. «Основы автоматики и КИП», которая позволяет студентам изучить общую классификацию автоматических регуляторов.
Изучить принцип построения функциональной схемы последовательного подключения автоматических регуляторов и датчиков первичной сигнализации, подавающее сигнал на первичные регуляторы.
ПЛАН ЗАНЯТИЯ
№ 47 “04” марта 2019г.
Группа: 4Х
Специальность: 15.02.06 Монтаж и техническая эксплуатация холодильно-компрессорных машин и установок (по отраслям)
Тема занятия: «Классификация автоматических регуляторов
Цель занятия: Изучение основных видов автоматических регуляторов. Изучение общих сведений о автоматических регуляторов, принцип построения и расположения автоматических регуляторов. Изучить основные виды автоматических регуляторов и принцип их работы.
Вид занятия: Лекция.
Вид лекции: Лекция с применением наглядности.
Форма проведения занятия: наглядный, самостоятельная работа.
Междисциплинарные связи: дисциплины «Физика», «Инженерная графика», «Электротехника и электрооборудование».
Методическое обеспечение: Макеты, наглядные материалы.
Литература:
Основные источники:
1. Основы автоматизации технологических процессов : [Электронный ресурс] учебное пособие для СПО / А. В. Щагин, В. И. Демкин, В. Ю. Кононов, А. Б. Кабанова. — М. : Издательство Юрайт, 2018. — 163 с. — (Серия : Профессиональное образование). — ISBN 978-5-534-03848-4. Режим доступа : https://biblio-online.ru/book/322EADDA-5605-4643-B6B9-599C54F3CEEE/osnovy-avtomatizacii-tehnologicheskih-processov
2. Шишмарёв, В. Ю. Автоматика :[Электронный ресурс] учебник для СПО / В. Ю. Шишмарёв. — 2-е изд., испр. и доп. — М. : Издательство Юрайт, 2018. — 280 с. — (Серия : Профессиональное образование). — ISBN 978-5-534-09343-8. Режим доступа: https://biblio-online.ru/book/4C14597F-4A52-4789-BC07-79633EE11AC2/avtomatika
3.Пантелеев В.Н. Основы автоматизации производства: [Текст] учебник для студ. Учреждений сред. Проф. Образования/ В.Н. Пантелеев, В.М. Прошин. – 8-е изд., стер. – М.: Издательский центр «Академия», 2016.-208 с.
Дополнительные источники:
1.Шишмарев В.Ю. Автоматизация технологических процессов:[Текст] учебник для студентов учреждений сред. Проф. Образования/ В.Ю. Шишмарев. – 9-е изд., стер. – М. : Издательский центр «Академия», 2014.- 352 с.
Технические средства обучения: модели оборудования, мультимедийное устройство, плакаты.
ХОД ЗАНЯТИЯ:
Тема: Классификация автоматических регуляторов.
Цель: Закрепить знания правил эксплуатации автоматических регуляторов, изучить принцип построения первичного подключения автоматических регуляторов в холодильных установках. Закрепить знания правил построения функциональной схемы холодильной установки
Задачи:
Образовательная: Закрепить знания правил построения функциональных схем холодильных установок. Изучить классификацию автоматических регуляторов, принцип построения и обозначения на схемах.
Развивающая: Развивать умения самостоятельно составлять схему расположения и подключения систем автоматического регулирования. Развить умение определять виды автоматических регуляторов..
Воспитывающая: Воспитывать у студентов чувство ответственности за выполненную работу, нравственные, поведенческие и другие качества личности.
Методическая цель занятия: Активация мыслительной деятельности студентов с использованием наглядных средств обучения.
Мотивация обучения: полученные знания в ходе изучения темы студент сможет применять практически, в дальнейшем правильно эксплуатируя автоматические регуляторы. Студент должен обладать необходимым комплексом знаний и практических навыков для выполнения работ по подключению и расположению систем автоматического регулирования.
Ход занятия:
1. Организационный момент (2 мин)
Приветствие, психологическая установка на привлечение внимания студентов к занятию, проверка посещаемости и подготовленности к занятию. Отметить присутствующих и отсутствующих.
2. Актуализация опорных знаний:
Устный опрос студентов
1. Что такое функциональная схема.
2. Что такое электрическая схема.
3. Чем отличается электрическая схема от принципиальной.
4. По какому ГОСТу можно расписать основные элементы функциональной схемы.
5. Что указывается в приборах местных и на щите управления.
Изложение основного материала (40 мин)
Автоматический регулятор–это средство автоматизации, получающее, усиливающее и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования; он обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону.
Автоматические регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой энергии и др.
По конструктивным признакам автоматические регуляторы подразделяются на аппаратные, приборные, агрегатные и модульные (элементные).
Регуляторы аппаратного типа конструктивно представляют собой техническое устройство, работающее в комплекте с первичным измерительным преобразователем. Аппаратные автоматические регуляторы работают независимо (параллельно) от средств измерения данного технологического параметра.
Регуляторы приборного типа работают только в комплекте с вторичным измерительным прибором. Приборные регуляторы не имеют непосредственной связи с первичным измерительным преобразователем.
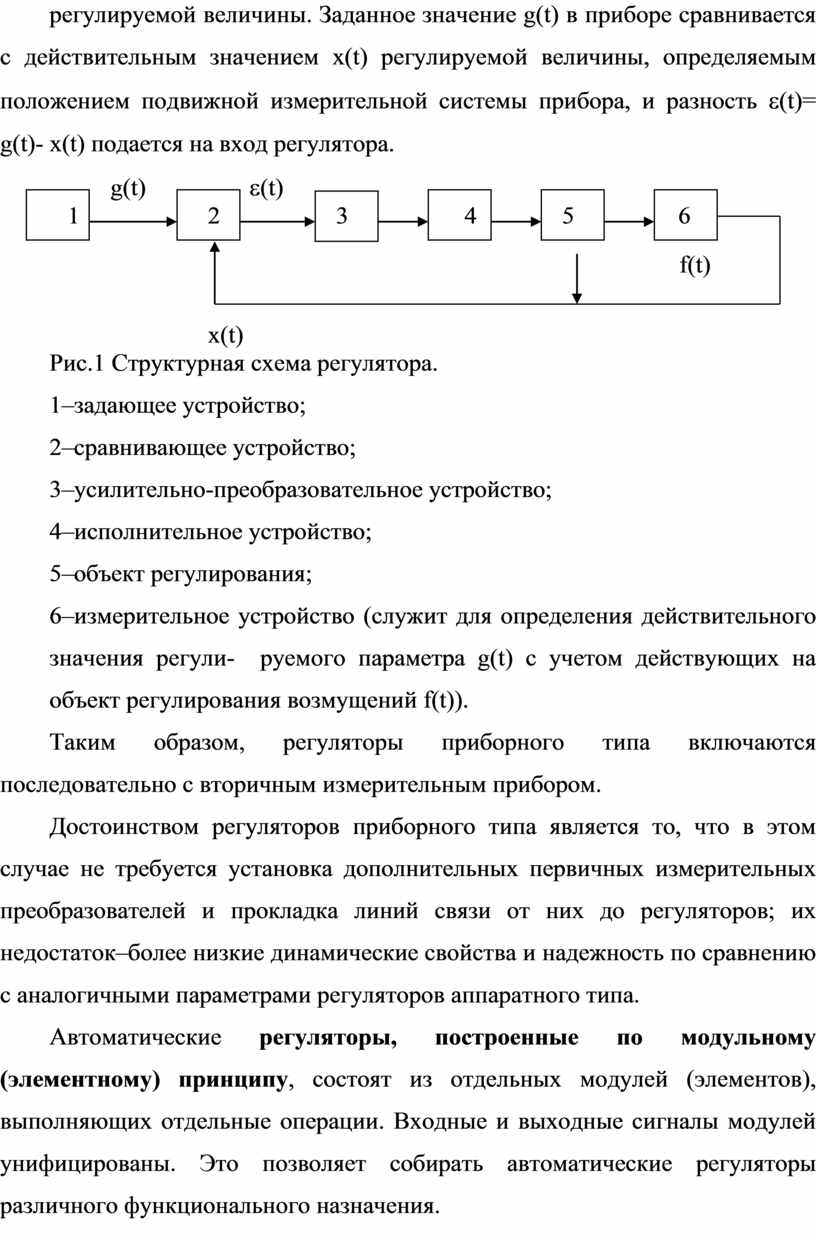
Сигнал об отклонении регулируемой величины от заданного значения e(t) поступает на вход приборного регулятора от вторичного измерительного прибора. Для этого измерительный прибор имеет задающее устройство, на котором вручную устанавливается требуемое заданное значение регулируемой величины. Заданное значение g(t) в приборе сравнивается с действительным значением x(t) регулируемой величины, определяемым положением подвижной измерительной системы прибора, и разность e(t)= g(t)- x(t) подается на вход регулятора.
![]()
![]()
![]()
![]()
![]()
![]() g(t) e(t)
g(t) e(t)
![]()
![]()
![]()
![]()
![]()
![]()
![]() 1 2 3 4
5 6
1 2 3 4
5 6
![]()
![]()
![]() f(t)
f(t)
х(t)
Рис.1 Структурная схема регулятора.
1–задающее устройство;
2–сравнивающее устройство;
3–усилительно-преобразовательное устройство;
4–исполнительное устройство;
5–объект регулирования;
6–измерительное устройство (служит для определения действительного значения регули- руемого параметра g(t) с учетом действующих на объект регулирования возмущений f(t)).
Таким образом, регуляторы приборного типа включаются последовательно с вторичным измерительным прибором.
Достоинством регуляторов приборного типа является то, что в этом случае не требуется установка дополнительных первичных измерительных преобразователей и прокладка линий связи от них до регуляторов; их недостаток–более низкие динамические свойства и надежность по сравнению с аналогичными параметрами регуляторов аппаратного типа.
Автоматические регуляторы, построенные по модульному (элементному) принципу, состоят из отдельных модулей (элементов), выполняющих отдельные операции. Входные и выходные сигналы модулей унифицированы. Это позволяет собирать автоматические регуляторы различного функционального назначения.
Автоматические регуляторы, построенные по агрегатному (блочному) принципу, состоят из отдельных унифицированных блоков, выполняющих определенные функции. Входные и выходные сигналы этих блоков унифицированы. Это позволяет из блоков проектировать автоматические регуляторы различного функционального назначения.
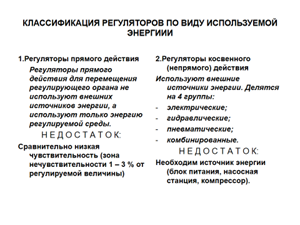
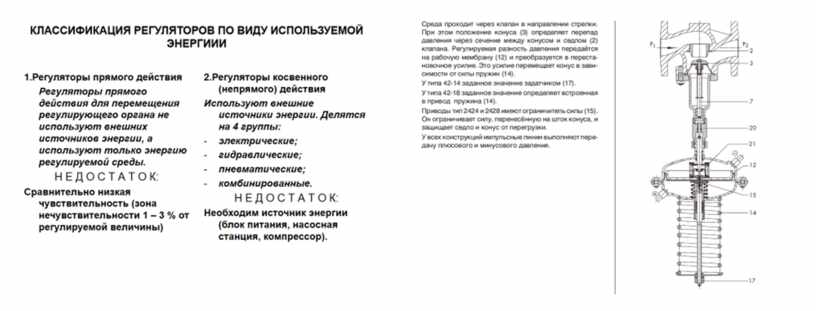
В зависимости от источника используемой энергии автоматические регуляторы подразделяются на регуляторы прямого и непрямого действия.
В регуляторах прямого действия одновременно с измерением регулируемой величины от объекта регулирования отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм–регулирующий орган объекта регулирования. Таким образом, к автоматической системе «объект-регулятор» энергия извне не подводится.
В автоматических регуляторах непрямого действия для работы регулятора и воздействия на его исполнительный механизм подводится энергия извне.
В зависимости от вида используемой энергии регуляторы непрямого действия подразделяются на
Ø электрические (электромеханические, электронные),
Ø пневматические,
Ø гидравлические
Ø комбинированные (электропневматические, электрогидравлические).
Электрические автоматические регуляторы применяются главным образом для регулирования на невзрывоопасных объектах при больших расстояниях от пункта управления до объекта регулирования.
Пневматические автоматические регуляторы применяются во взрыво- и пожароопасных зонах при небольших расстояниях (до 400м) от пункта управления до объекта регулирования.
Гидравлические регуляторы применяются во взрыво- и пожароопасных зонах, как правило, при непосредственном размещении элементов регулятора в зоне объекта регулирования.
Комбинированные регуляторы применяются в случаях, когда необходимо использовать отдельные преимущества электро-, пневмо- или гидрорегуляторов.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейным и нелинейным законами регулирования.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, разрежения, расхода, уровня, состава и содержания вещества и т.п.
Заданное значение может иметь постоянную величину (в системах стабилизации) или изменяться по определенной программе (в системах программного регулирования).
Структурная схема регулятора может быть представлена как совокупность двух элементов: элемента сравнения и элемента, формирующего алгоритм (закон) регулирования.
При автоматизации химико-технологических производств используются регуляторы и контроллеры.
Регуляторы представляют собой технические средства с жесткой функциональной структурой, обеспечивающей реализацию закона регулирования.
Контроллеры – специализированные вычислительные устройства, обеспечивающие выполнение закона регулирования программное. При изменении программы алго-блок контроллера реализует выбранный алгоритм регулирования.
Регуляторы могут быть пневматическими или электрическими, а контроллеры – электрическими.
В пневматических регуляторах изменение входных и выходных сигналов находится в диапазоне 20¸100 кПа. В регуляторах системы «СТАРТ» реализуются ПИ и ПИД-законы регулирования с независимыми параметрами настройки. В этих регуляторах в качестве одного из параметров настройки используют величину, обратную коэффициенту передачи, называемую пределом пропорциональности
Предел пропорциональности показывает, в каком диапазоне изменяется входной сигнал регулятора при изменении его выходного сигнала от 0 до 100%. Он характеризует степень отрицательной обратной связи в пропорциональном регуляторе. Чем меньше, тем силнее воздействие регулятора на объект.
В электрических регуляторах и контроллерах используются следующие диапазоны изменения сигналов: 0–5 мА; 0–20 мА; 4–20 мА и 0–10 В.
Электрические регуляторы и алгоритмы регулирования регулирующих микропроцессорных контроллеров описываются законами с зависимыми параметрами настройки.
Наличие определенного диапазона выходного сигнала регулятора обуславливает его ограничение по величине. Поэтому в случае значительного рассогласования или при установке определенных значений настроечных параметров выходной сигнал регулятора будет принимать предельные значения.
Для обеспечения неавтономных кондиционеров холодом применяют холодильные станции различной холодопроизводительности. Холодильные станции обычно комплектуются двумя или более холодильными установками, работающими с промежуточным холодоносителем, как правило водой.
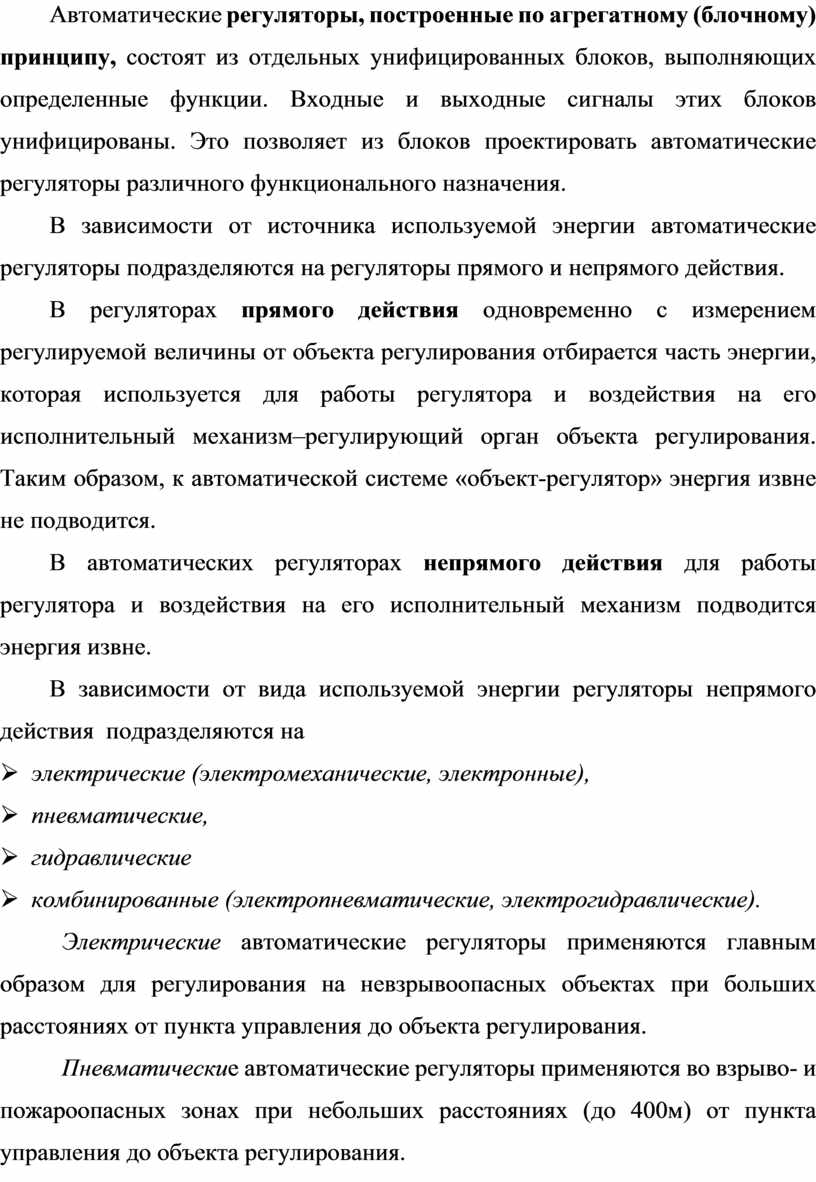
Рассмотрим автоматизацию отдельных элементов холодильных установок и холодильной станции в целом. Защита компрессора от повышенного давления на нагнетании и пониженного на всасывании осуществляется с помощью реле давления (рис. 1). Работу системы контролирует реле контроля смазки. Компрессоры большой холодопроизводительности охлаждаются водой. Для защиты их от перегрева в случае прекращения подачи охлаждающей воды устанавливают реле расхода. При отклонении какого-либо из параметров срабатывает соответствующее реле защиты и компрессор останавливается.
При остановке электродвигателя компрессора закрывается сблокированный с ним соленоидный вентиль трубопровода охлаждающей воды. Защита испарителя холодильной установки (рис. 1.) предусматривается во избежание замерзания воды в трубах испарителя.
На трубопроводе выходящей из испарителя воды установлен датчик позиционного терморегулятора, настроенного на 1—3 °С. При температуре воды ниже установленной размыкаются контакты регулятора и останавливается электродвигатель компрессора. Если внезапно прекратился приток воды через испаритель, регулятор вследствие инертности системы может не сработать даже при замораживании испарителя. Во избежание этого устанавливают.
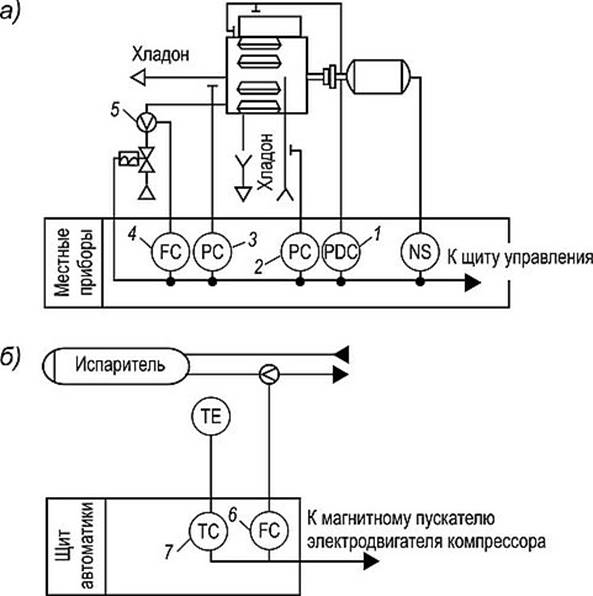
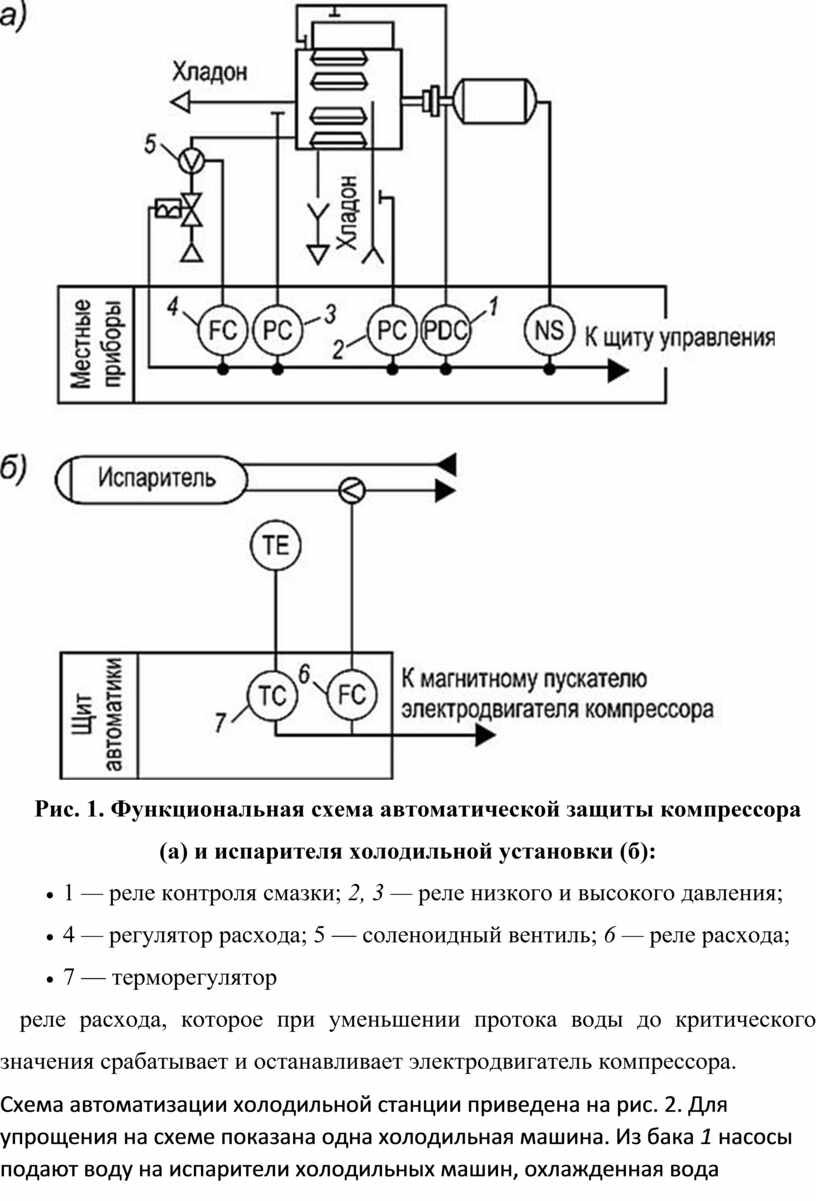
Рис. 1. Функциональная схема автоматической защиты компрессора (а) и испарителя холодильной установки (б):
· 1 — реле контроля смазки; 2, 3 — реле низкого и высокого давления;
· 4 — регулятор расхода; 5 — соленоидный вентиль; 6 — реле расхода;
· 7 — терморегулятор
реле расхода, которое при уменьшении протока воды до критического значения срабатывает и останавливает электродвигатель компрессора.
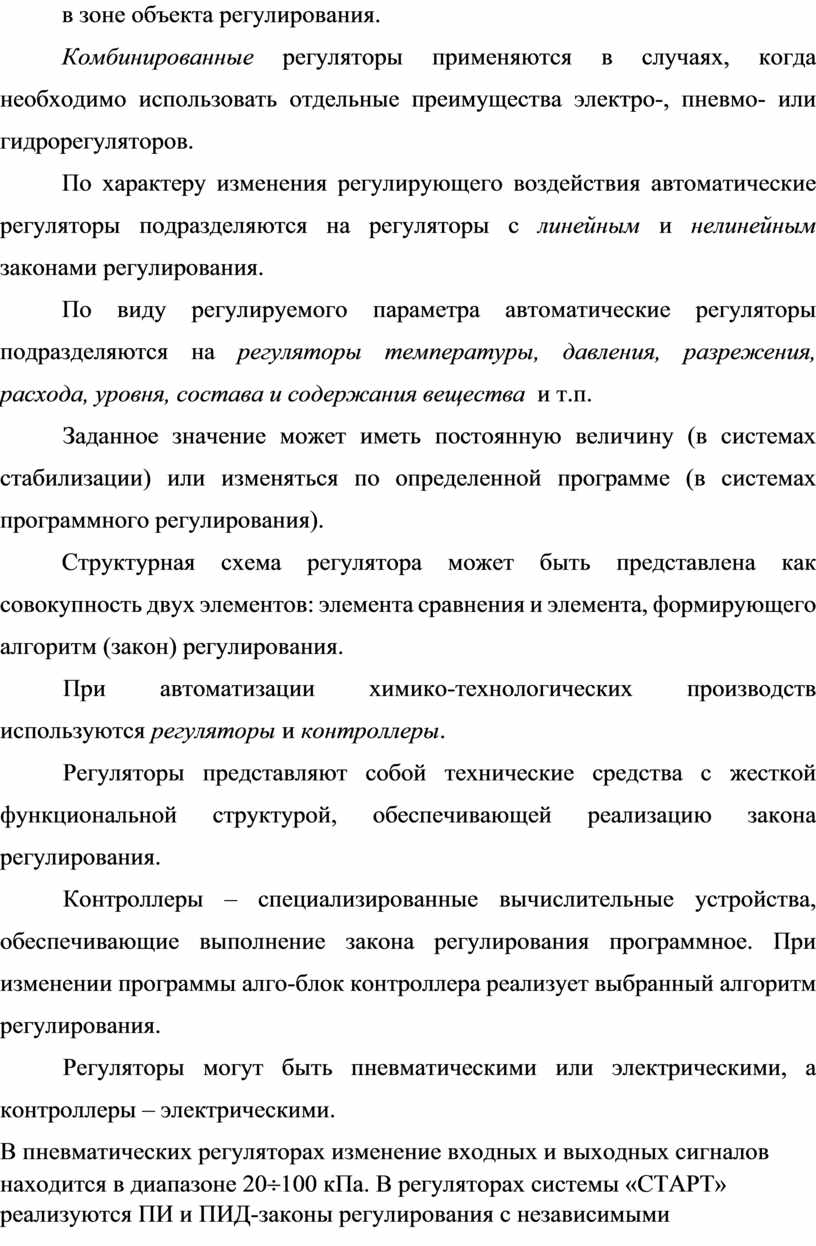
Схема автоматизации холодильной станции приведена на рис. 2. Для упрощения на схеме показана одна холодильная машина. Из бака 1 насосы подают воду на испарители холодильных машин, охлажденная вода сливается в бак 2 и насосами подается к кондиционерам, а затем снова сливается в бак 1. На охлаждение конденсаторов вода подается из градирни.
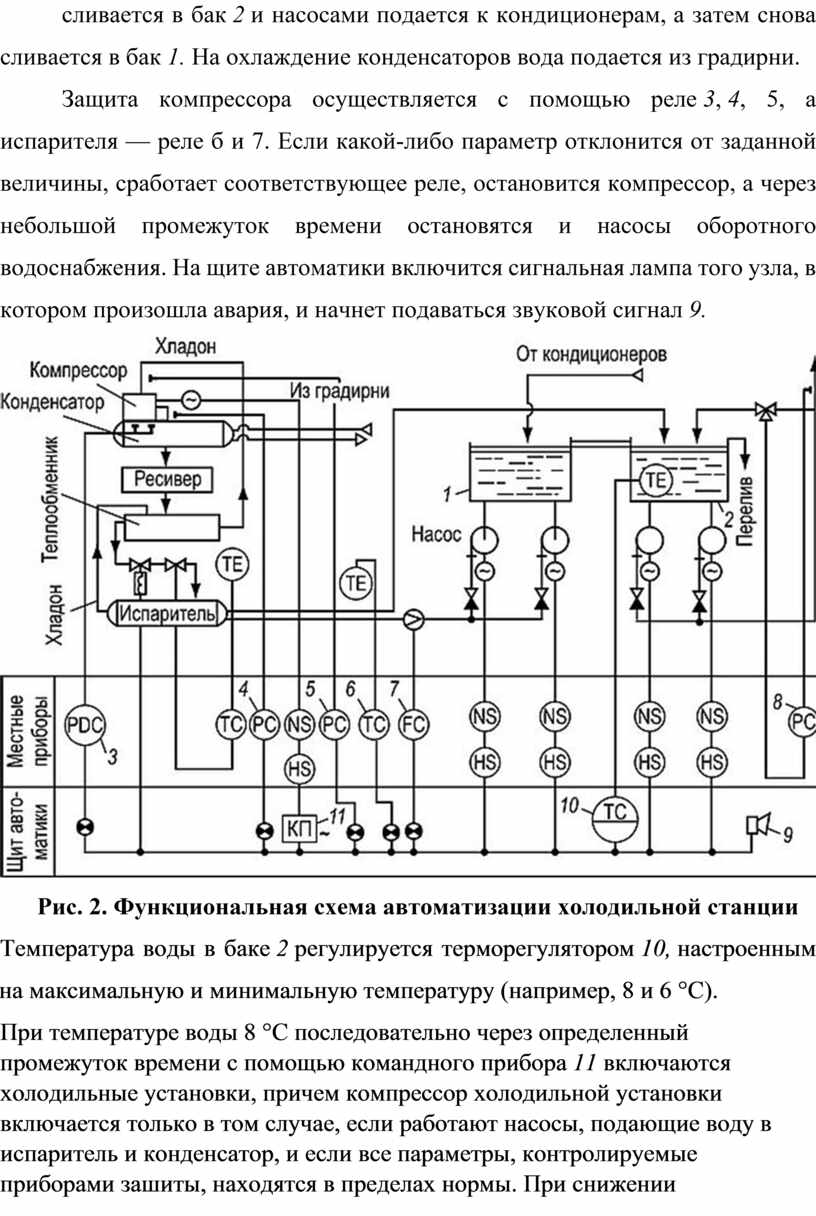
Защита компрессора осуществляется с помощью реле 3, 4, 5, а испарителя — реле б и 7. Если какой-либо параметр отклонится от заданной величины, сработает соответствующее реле, остановится компрессор, а через небольшой промежуток времени остановятся и насосы оборотного водоснабжения. На щите автоматики включится сигнальная лампа того узла, в котором произошла авария, и начнет подаваться звуковой сигнал 9.
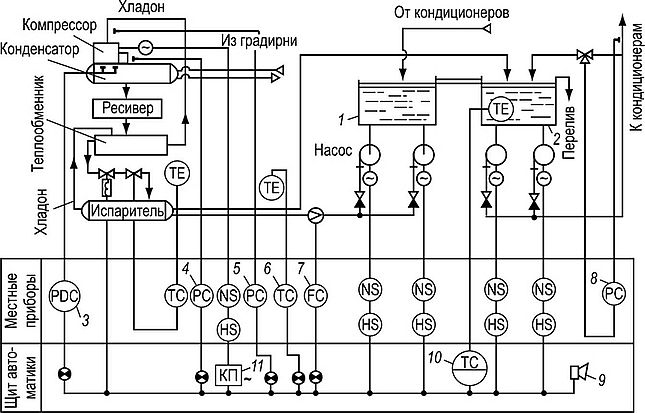
Рис. 2. Функциональная схема автоматизации холодильной станции
Температура воды в баке 2 регулируется терморегулятором 10, настроенным на максимальную и минимальную температуру (например, 8 и 6 °С).
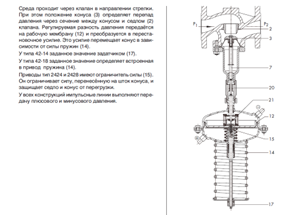
При температуре воды 8 °С последовательно через определенный промежуток времени с помощью командного прибора 11 включаются холодильные установки, причем компрессор холодильной установки включается только в том случае, если работают насосы, подающие воду в испаритель и конденсатор, и если все параметры, контролируемые приборами зашиты, находятся в пределах нормы. При снижении температуры холодной воды до 6 °С холодильные установки отключаются в той же последовательности. Для поддержания постоянного давления воды, подаваемой к кондиционерам, установлен регулятор давления прямого действия 8. В целях экономии водопроводной воды для охлаждения конденсаторов холодильных машин применяются системы оборотного водоснабжения, в которых нагретая вода охлаждается в градирнях.
Обобщение и систематизация материала:
Самостоятельная работа студентов в группах по освоению и закреплению изученного материала.
Для закрепления материала студенты делятся на пары по 2 человека.
Домашнее задание:
Выполнить самостоятельную работу № 10, законспектировать дома материал на тему: Построение векторных диаграмм. Информация доступна в следующих учебных изданиях:
1. Прошин В.М. Электротехника для неэлектрических профессий: учебник для студ. Учреждений сред. Проф. Образования / В.М. Прошин. – М.: Издательский центр «Академия «2014. – 464 с.
2. Данилов И.А. Общая электротехника с основами электроники. – М. Высшая школа, 2008.
Приложение 1
1. Что называется электрической машиной?
А). Устройство, предназначенное для электрификации и автоматизации производства.
Б). Электромагнитное устройство, имеющее две или более индуктивно связанные обмотки и предназначенное для преобразования одной системы переменного тока в другую.
В). Электромеханический преобразователь, в котором преобразуется механическая энергия в электрическую и наоборот.
2. Дайте определение электродвигателя.
А). Машина, преобразующая механическую энергию в электрическую.
Б). Электромагнитное устройство, имеющее две или более индуктивно связанные обмотки и предназначенное для преобразования одной системы переменного тока в другую.
В). Машина, преобразующая электрическую энергию в механическую.
3. Дайте определение генератора.
А). Машина, преобразующая механическую энергию в электрическую.
Б). Электромагнитное устройство, имеющее две или более индуктивно связанные обмотки и предназначенное для преобразования одной системы переменного тока в другую.
В). Машина, преобразующая электрическую энергию в механическую.
4. Какие законы лежит в основе работы электрических машин?
А). Законы Ома.
Б). Закон Джоуля – Ленца.
В). Законы электромагнитной индукции и электромагнитных сил.
5. Какие двигатели получили наибольшее распространение?
А) Двигатели постоянного тока.
Б) Асинхронные электродвигатели.
В) Синхронные электродвигатели.
6. Может ли ротор АД вращаться синхронно с вращающимся магнитным полем статора?
А) Да.
Б) Нет.
В) Не имеет значения.
7. У какого двигателя обмотка ротора соединяется «звездой» при изготовлении?
А) СД.
Б) АД с короткозамкнутым ротором.
В) АД с фазным ротором.
8. Если происходит выработка электроэнергии, то это….
А) Двигатель.
Б) Генератор.
В) Трансформатор.
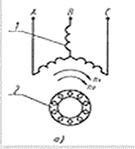
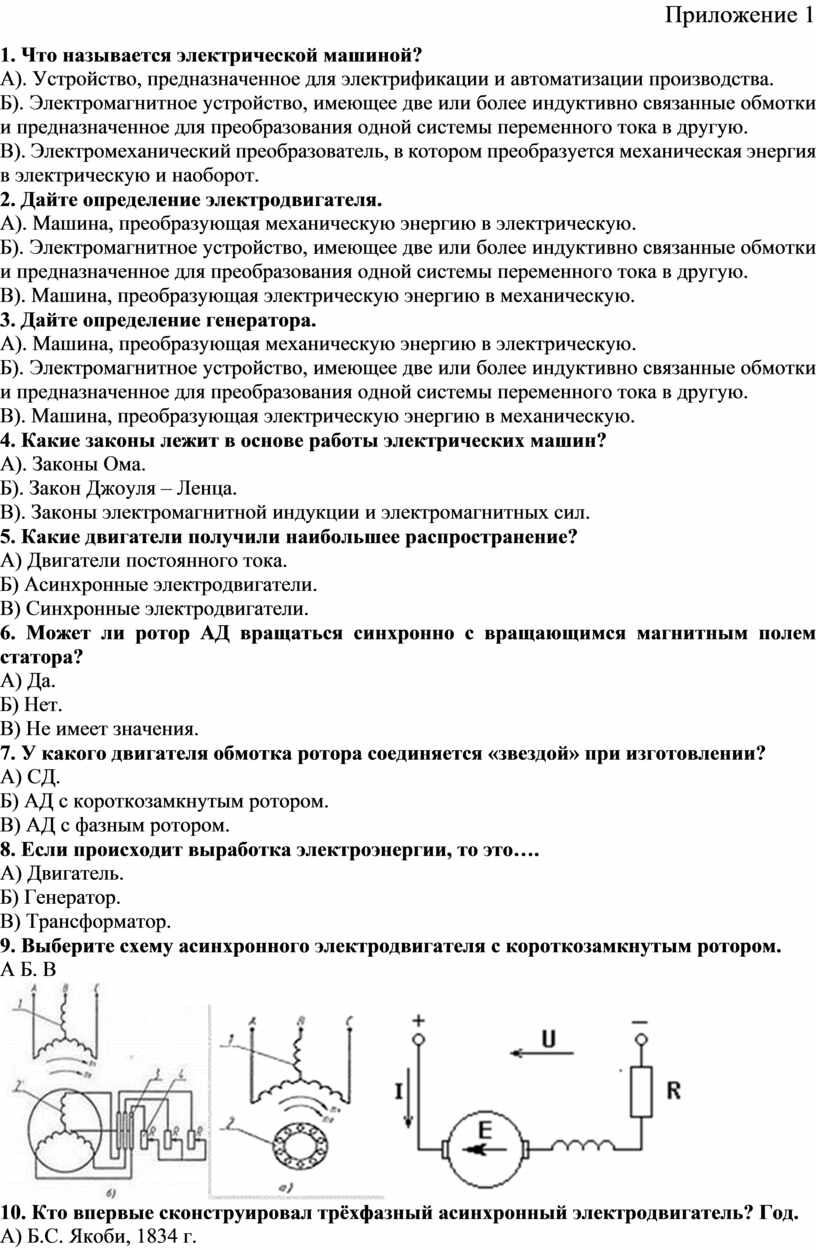
9. Выберите схему асинхронного электродвигателя с короткозамкнутым ротором.
А Б. В

10. Кто впервые сконструировал трёхфазный асинхронный электродвигатель? Год.
А) Б.С. Якоби, 1834 г.
Б) М.О. Доливо-Добровольский, 1889 г.
В) П.Н. Яблочков, 1876 г.
11. Основные элементы асинхронного электродвигателя.
А) Статор, ротор, вал, обмотки.
Б) Станина, якорь.
В) Статор, якорь, подшипники.
12. Из какого материала выполняют статор асинхронного электродвигателя
А) Электротехническая сталь.
Б) Константан.
В) Никель.
13. Как включены обмотки статора трехфазного асинхронного электродвигателя?
А) 1- «треугольник», 2 – «звезда», 3 - «звезда», 4 - «треугольник»,
Б) 1- «звезда», 2 – «треугольник», 3 - «звезда», 4 - «треугольник»,
В) 1, 3 - «звезда», 2, 4 - «треугольник».
14. Асинхронный электродвигатель-это двигатель работающий
А) На постоянном токе.
Б) На переменном токе.
В) Дизельном топливе.
15. Вращающий момент асинхронного электродвигателя
А) Не зависит от номинальной мощности.
Б) Прямопропорционален номинальной мощности.
В) Обратнопропорционален номинальной мощности.
16. Из какого вещества выполняются стержни короткозамкнутого ротора?
А) Сталь.
Б) Чугун.
В) Медь.
17. Как укладываются обмотки асинхронного двигателя?
А) Наматываются на ротор.
Б) Укладываются в пазы статора и ротора.
В) Запаиваются в корпус статора.

Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.