В геометрии применяются различные методы решения задач - это синтетический (чисто геометрический) метод, метод преобразований, векторный, метод координат и другие. Они занимают различное положение в школьном курсе математики. Основным методом считается синтетический, а из других наиболее высокое положение занимает координатно – векторный метод, так как он тесно связан с алгеброй. Изящество синтетического метода достигается с помощью интуиции, догадок, дополнительных построений. Координатный метод этого не требует: решение задач во многом алгоритмизировано, что в большинстве случаев упрощает поиск и само решение задачи. Предметом исследования данной работы является координатно-векторный метод и его применение для решения стереометрических задач.
Цель работы – систематизировать теоретические и практические знания для решения стереометрических задач.
Методы решения стереометрических задач
3
Генералова Е.Г.
МОУ «СОШ №24»
Введение
В геометрии применяются различные методы решения задач это
синтетический (чисто геометрический) метод, метод преобразований,
векторный, метод координат и другие. Они занимают различное положение в
школьном курсе математики. Основным методом считается синтетический, а из
других наиболее высокое положение занимает координатно – векторный метод,
так как он тесно связан с алгеброй. Изящество синтетического метода
достигается с помощью интуиции, догадок, дополнительных построений.
Координатный метод этого не требует: решение задач во многом
алгоритмизировано, что в большинстве случаев упрощает поиск и само решение
задачи.
Координатно – векторный метод позволяет значительно облегчить
решение задач на нахождение угла между прямыми и плоскостями, расстояния
от точки до прямой и между прямыми. Такие задания встречаются в задаче №14
единого государственного экзамена. Этим и определяется актуальность
выбранной темы: «Использование координатно – векторного метода при
решении стереометрических задач».
Предметом исследования данной работы является координатновекторный
метод и его применение для решения стереометрических задач.
Цель работы – систематизировать теоретические и практические знания
для решения стереометрических задач.4
Глава 1 Теоретикометодические аспекты изучения темы «Использование
координатно – векторного метода при решении стереометрических задач» в
школьном курсе математики
1.2 Опорные задачи в координатах
Система координат — комплекс определений, реализующий метод
координат, то есть способ определять положение точки или тела с помощью
чисел или других символов. Совокупность чисел, определяющих положение
конкретной точки, называется координатами этой точки. Координаты на
плоскости и в пространстве можно вводить бесконечным числом разных
способов. Решая ту или иную математическую или физическую задачу методом
координат, можно использовать различные координатные системы, выбирая ту
из них, в которой задача решается проще или удобнее в данном конкретном
случае. Существует множество систем координат: аффинная, полярная,
биполярная, коническая, параболическая, проективная, сферическая,
цилиндрическая и др. Наиболее используемая из них — прямоугольная система
координат (также известная как декартова система координат). Ею мы и будем
пользоваться для решения задач.
Прямоугольная система координат в пространстве образуется тремя
взаимно перпендикулярными осями координат ОХ, OY и OZ. Оси координат
пересекаются в точке O , которая называется началом координат, на каждой оси
выбрано положительное направление, указанное стрелками, и единица
измерения отрезков на осях. Каждой точке пространства ставится в
соответствие тройка чисел, называемых её координатами.
Применение координатно – векторного метода даёт нам множество
возможностей для решения задач.
1. Нахождение координат вектора
Пусть A(x1; y1; z1), B(x2; y2; z2) координаты соответственно начала и конца
вектора
⃗АВ , тогда
⃗АВ{x2−x1;y2−y1;z2−z1}
.2. Нахождение расстояния между двумя точками, заданными своими
координатами. Пусть A(x1; y1; z1), B(x2; y2; z2), тогда
5
3. Нахождение координат точки, делящей отрезок в заданном отношении
Пусть отрезок АВ задан в системе координат ОХYZ координатами своих
концов А(x1, y1, z1) и В(x2, y2, z2), а точка С (x, y, z) делит отрезок АВ в данном
: λ ⃗АС=λ∙⃗СВ , тогда координаты точки С вычисляются по
отношении
формулам:
x=
x1+λx2
1+λ ,y=
y1+λy2
1+λ ,z=
z1+λz2
1+λ .
В частности координаты середины отрезка вычисляются по формулам:
x=
x1+x2
2 ,y=
y1+y2
2 ,z=
z1+z2
2
4. Скалярное произведение векторов
Скалярное произведение двух векторов – это произведение длин этих
векторов на косинус угла между ними.
5.Уравнение плоскости
Определение. ad – bc называется определителем (или детерминантом) матрицы
(a b
c d)
Определитель матрицы будем обозначать так: |a b
c d| .
.
Аналогично таблица
(a1 a2 a3
c1 c2 c3)
b1 b2 b3
называется матрицей третьего порядка.Определение. Число a1∙|b2 b3
c2 c3|−a2 ∙|b1 b3
c1 c3| + a3 ∙|b1 b2
c1 c2|
6
называется определителем (или детерминантом) матрицы
(a1 a2 a3
c1 c2 c3)
b1 b2 b3
и
обозначается |a1 a2 a3
c1 c2 c3| .
b1 b2 b3
Пусть в пространстве с фиксированной точкой О задана плоскость α .
Любой ненулевой вектор, параллельный этой плоскости, мы будем называть ее
направляющим вектором.
Пусть ненулевой вектор ⃗n перпендикулярен плоскости α . Такой вектор
называется нормальным вектором этой плоскости.
Уравнение плоскости, проходящей через три данные точки ( x0 , y0 , z0
), ( x1 , y1 , z1 ), ( x2 , y2 , z2 ), в координатной форме можно записать
так: |x−x0 y−y0 z−z0
x2−x0 y2−y0 z2−z0| = 0.
x1−x0 y1−y0 z1−z0
Всякая плоскость в пространстве может быть задана в системе координат
линейным уравнением Ax + By + Cz + D = 0, в котором коэффициенты A, B и C
не равны нулю одновременно; и обратно, всякое уравнение такого вида, в
котором A2 + B2 + C2 ≠ 0 задает в системе координат плоскость.
Если плоскость задана в системе координат уравнениемAx + By + Cz + D = 0, то нормальный вектор ⃗n этой плоскости имеет
координаты
{A;B;C}
.
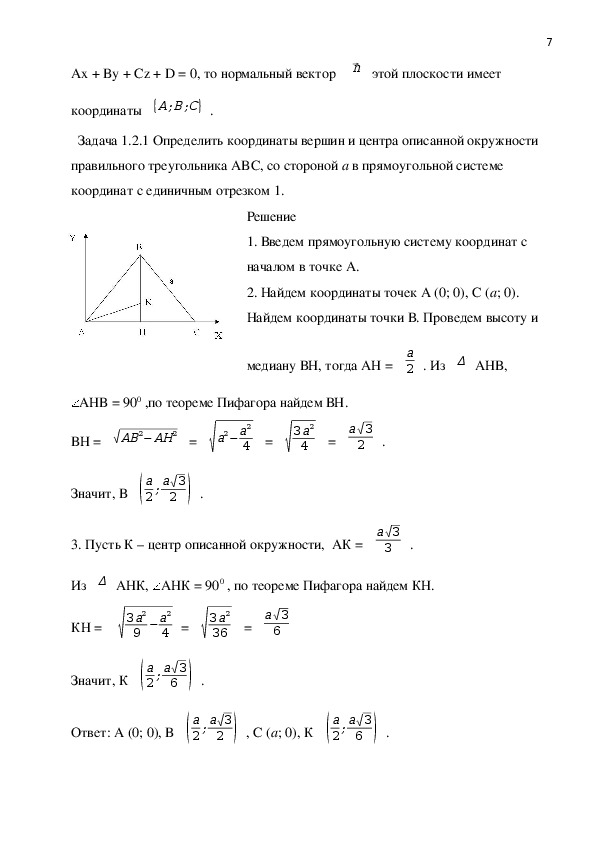
Задача 1.2.1 Определить координаты вершин и центра описанной окружности
правильного треугольника ABC, со стороной a в прямоугольной системе
7
координат с единичным отрезком 1.
Решение
1. Введем прямоугольную систему координат с
началом в точке А.
2. Найдем координаты точек А (0; 0), С (а; 0).
Найдем координаты точки В. Проведем высоту и
медиану ВН, тогда АН =
a
2 . Из ∆ АНВ,
АНВ = 900 ,по теореме Пифагора найдем ВН.
= √a2−a2
ВН = √AB2−AH2
(a
2 )
2;a√3
Значит, В
.
4 = √ 3a2
4
a√3
2
.
=
3. Пусть К – центр описанной окружности, АК =
a√3
3
.
Из ∆ АНК, АНК = 900 , по теореме Пифагора найдем КН.
36 =
a√3
6
4 = √ 3a2
КН = √ 3a2
9 −a2
(a
6 )
2;a√3
(a
2 )
2;a√3
Ответ: А (0; 0), В
Значит, К
.
, С (а; 0), К
(a
6 )
2;a√3
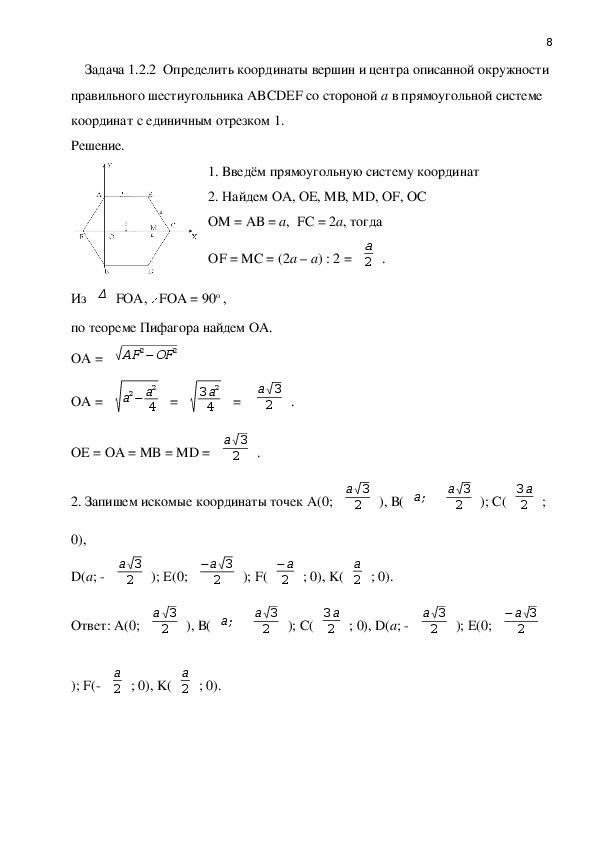
.Задача 1.2.2 Определить координаты вершин и центра описанной окружности
правильного шестиугольника ABCDEF со стороной a в прямоугольной системе
8
координат с единичным отрезком 1.
Решение.
1. Введём прямоугольную систему координат
2. Найдем ОА, ОЕ, МВ, МD, OF, ОС
ОМ = АВ = а, FС = 2а, тогда
ОF = MC = (2a – a) : 2 =
a
2 .
Из ∆ FOA, FOA = 90o ,
по теореме Пифагора найдем ОА.
ОА = √AF2−OF2
OA = √a2−a2
4 = √ 3a2
=
a√3
2
.
4
OE = OA = MB = MD =
a√3
2
.
2. Запишем искомые координаты точек А(0;
a√3
2
), В( a;
a√3
2
3a
2 ;
); С(
0),
D(a;
a√3
2
); E(0;
−a√3
2
−a
2 ; 0), K(
a
2 ; 0).
); F(
Ответ: А(0;
a√3
2
), В( a;
a√3
2
3a
2 ; 0), D(a;
a√3
2
); С(
); E(0;
−a√3
2
); F(
a
2 ; 0), K(
a
2 ; 0).9
1.3 Угол между прямыми
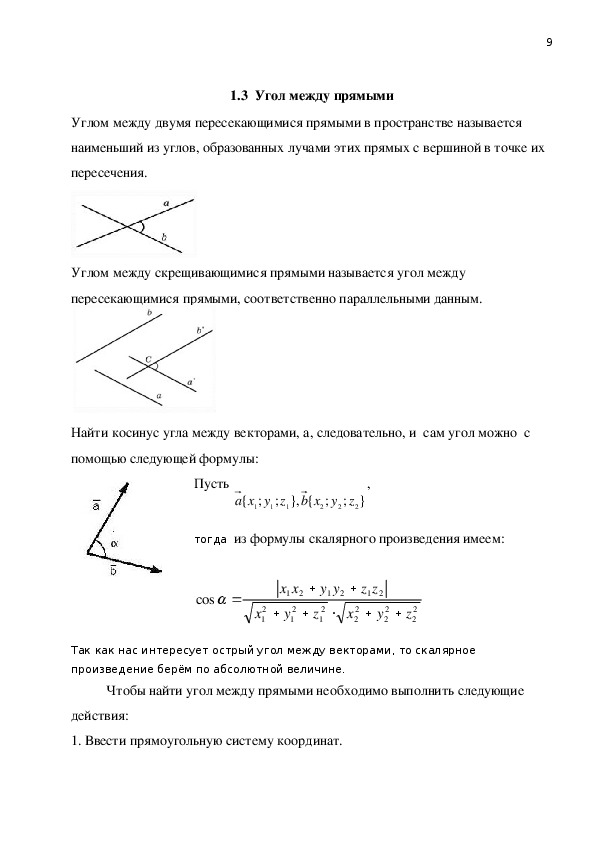
Углом между двумя пересекающимися прямыми в пространстве называется
наименьший из углов, образованных лучами этих прямых с вершиной в точке их
пересечения.
Углом между скрещивающимися прямыми называется угол между
пересекающимися прямыми, соответственно параллельными данным.
Найти косинус угла между векторами, а, следовательно, и сам угол можно с
помощью следующей формулы:
Пусть
,
;{
zyxа
;
1
1
1
;{},
zyxb
};
2
2
2
тогда из формулы скалярного произведения имеем:
cos
xx
21
2
y
1
yy
1
2
z
1
2
2
2
x
zz
21
y
2
x
1
2
2
z
2
2
Так как нас интересует острый угол между векторами, то скалярное
произведение берём по абсолютной величине.
Чтобы найти угол между прямыми необходимо выполнить следующие
действия:
1. Ввести прямоугольную систему координат.10
2. Определить координаты двух точек прямой а и найти координаты её
направляющего вектора.
3. Определить координаты двух точек прямой b и найти координаты её
направляющего вектора.
4. Вычислить косинус угла
α
, воспользовавшись формулой:
cosα= |⃗a∙⃗b|
|⃗a|∙|⃗b|
α
равен
5. Искомый угол
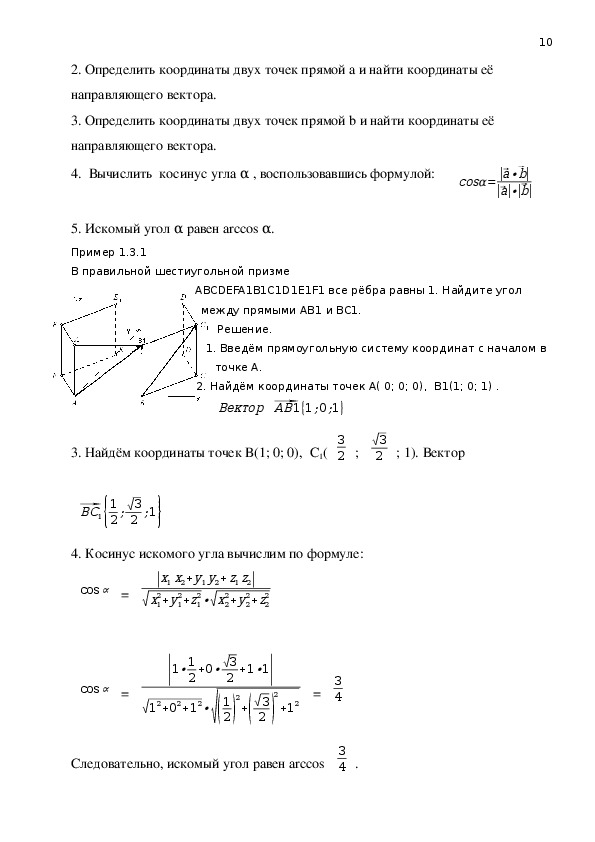
Пример 1.3.1
В правильной шестиугольной призме
arccos
.α
АВСDEFA1B1C1D1E1F1 все рёбра равны 1. Найдите угол
между прямыми АB1 и ВC1.
Решение.
1. Введём прямоугольную систему координат с началом в
точке А.
2. Найдём координаты точек А( 0; 0; 0), B1(1; 0; 1) .
Вектор ⃗АВ1{1;0;1}
3. Найдём координаты точек В(1; 0; 0), С1(
3
2 ;
√3
2 ; 1). Вектор
⃗ВС1{1
2 ;√3
2 ;1}
4. Косинус искомого угла вычислим по формуле:
cos∝ =
cos∝ =
|x1x2+y1y2+z1z2|
2+y2
2+y1
2∙√x2
2+z1
2
2+z2
√x1
2 +1∙1|
|1∙1
2 +0∙√3
√12+02+12∙√( 1
+( √3
2 )2
2)2
3
4
=
+12
Следовательно, искомый угол равен arccos
3
4 .Ответ: arccos
3
4 .
11
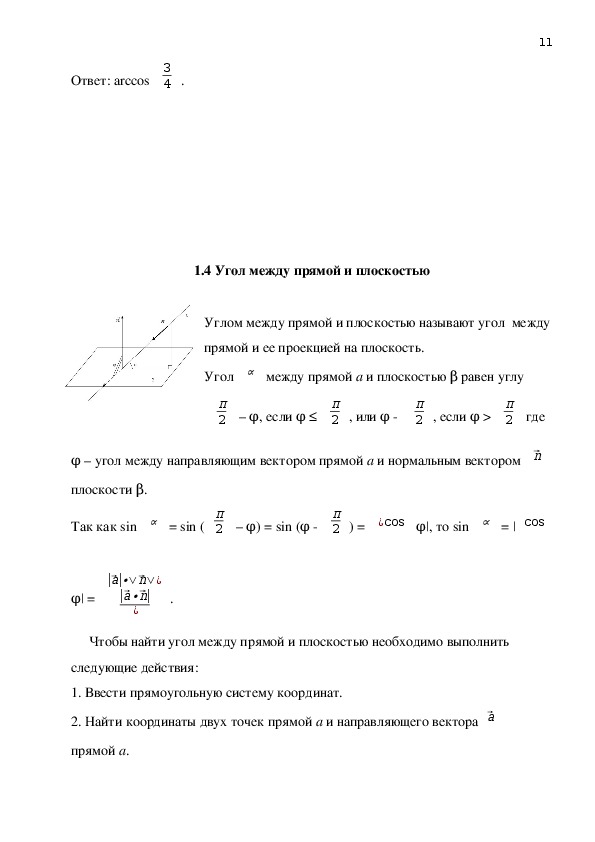
1.4 Угол между прямой и плоскостью
Углом между прямой и плоскостью называют угол между
прямой и ее проекцией на плоскость.
Угол ∝ между прямой а и плоскостью
равен углу
β
π
2 –
φ
φ
, если
≤
π
2 , или
φ
π
2 , если
> φ
π
2 где
φ
– угол между направляющим вектором прямой
а и нормальным вектором ⃗n
плоскости
.β
Так как sin ∝ = sin (
π
2 –
) = φ sin (
φ
π
2 ) = ¿cos
φ
|, то
sin ∝ = | cos
| = φ
|⃗a|∙∨⃗n∨¿
|⃗a∙⃗n|
¿
.
Чтобы найти угол между прямой и плоскостью необходимо выполнить
следующие действия:
1. Ввести прямоугольную систему координат.
2. Найти координаты двух точек прямой a и направляющего вектора ⃗a
прямой a.12
3. Найти координаты трех точек плоскости
определить координаты ее нормального вектора ⃗n .
β
не лежащих на одной прямой и
4. Найти синус угла ∝ , воспользовавшись формулой sin ∝ =
Искомый
угол между прямой и плоскостью равен: ∝ = arcsin
|⃗a|∙∨⃗n∨¿
|⃗a∙⃗n|
¿
|⃗a|∙∨⃗n∨¿
|⃗a∙⃗n|
¿
.
.
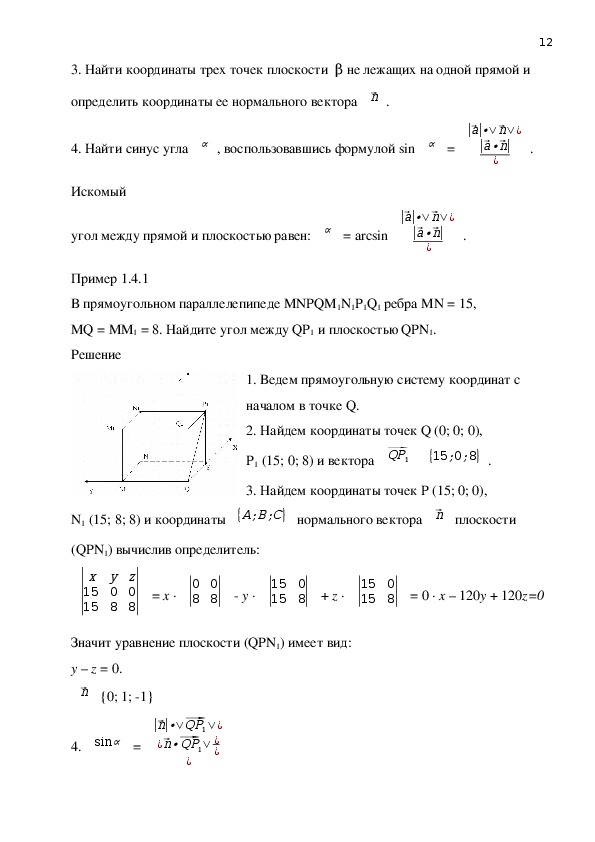
Пример 1.4.1
В прямоугольном параллелепипеде MNPQM1N1P1Q1 ребра MN = 15,
MQ = MM1 = 8. Найдите угол между QP1 и плоскостью QPN1.
Решение
1. Ведем прямоугольную систему координат с
началом в точке Q.
2. Найдем координаты точек Q (0; 0; 0),
{15;0;8}
P1 (15; 0; 8) и вектора
⃗QP1
.
N1 (15; 8; 8) и координаты
3. Найдем координаты точек P (15; 0; 0),
{A;B;C}
нормального вектора ⃗n плоскости
(QPN1) вычислив определитель:
| x y z
15 8 8| = x ∙ |0 0
15 0 0
8 8| y ∙ |15 0
15 8| + z ∙ |15 0
15 8| = 0 ∙ x – 120y + 120z=0
Значит уравнение плоскости (QPN1) имеет вид:
y – z = 0.
⃗n {0; 1; 1}
4. sin∝ =
|⃗n|∙∨⃗QP1∨¿
¿⃗n∙⃗QP1∨ ¿
¿
¿¿15∙0+0∙1+8∙(−1)∨
sin∝ =
¿
√152+02+82+√02+12+(−1)2
¿
13
4√2
17
=
Следовательно, искомый угол равен arcsin
4√2
17 .
Ответ: arcsin
4√2
17 .
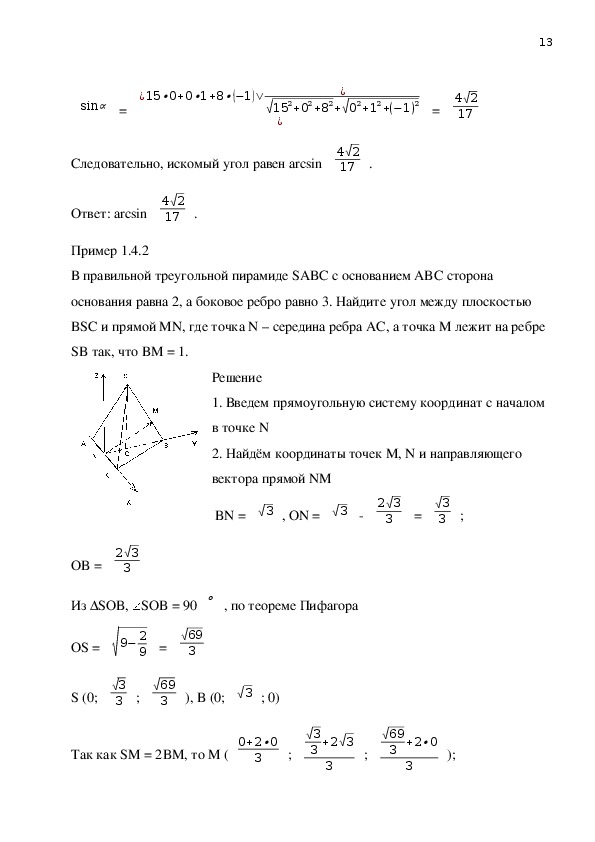
Пример 1.4.2
В правильной треугольной пирамиде SABC с основанием ABC сторона
основания равна 2, а боковое ребро равно 3. Найдите угол между плоскостью
BSC и прямой MN, где точка N – середина ребра AC, а точка М лежит на ребре
SB так, что ВМ = 1.
Решение
1. Введем прямоугольную систему координат с началом
в точке N
2. Найдём координаты точек M, N и направляющего
вектора прямой NM
BN = √3 , ON = √3
2√3
3
=
√3
3 ;
OB =
2√3
3
Из ∆SOB, SOB = 90 ° , по теореме Пифагора
OS = √9−2
√69
3
9 =
S (0;
√3
3 ;
√69
3
), B (0; √3 ; 0)
Так как SM = 2BM, то M (
0+2∙0
3
;
√3
3 +2√3
3
;
√69
3 +2∙0
3
);14
M (0;
7√3
9
;
√69
9
), N (0; 0; 0)
⃗NM { 0;
7√3
9
;
√69
9
}
3. Найдем координаты точек B ( 0; √3 ; 0), C (1; 0; 0), S (0;
√3
3 ;
√69
3
) и
координаты {A; B; C} нормального вектора ⃗n плоскости (CBS), вычислив
0
√69
3 | y ∙ |−1
0
−1 √69
3 | + z ∙
3| = (x – 1) ∙ |√3
√3
3
0
√69
определитель
0−1 √3
0−1 √3
3
|x−1 y z
|−1 √3
3| =
−1 √3
= (x – 1) ∙
√207
3
+ y ∙
√69
3
+ z ∙ (
√3
3 + √3 ) =
√207
3
x +
√69
3
2√3
3
z
√207
3
y +
= 0
Значит, уравнение плоскости (CBS) имеет вид:
√69 x + √23 y + 2z √69 =0
⃗n { √69 ; √23 ; 2}
|⃗n|∙∨⃗NM∨¿
¿⃗n∙⃗NM∨ ¿
¿
3. sin∝ =
¿15
sin∝ =
|√69∙0+√23∙7√3
9 |
9 +2∙√69
√(√69)2+(√23)2+22∙√02+(7√3
+(√69
9 )2
9 )2
√69
16
=
Тогда искомый угол между прямой и плоскостью равен arcsin
√69
16
Ответ: arcsin
√69
16 .
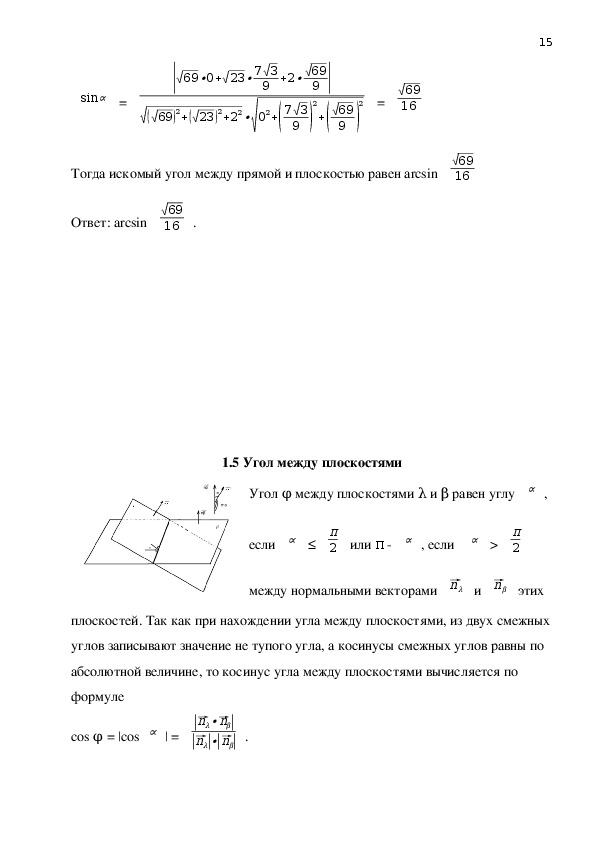
1.5 Угол между плоскостями
Угол
φ
между плоскостями
λ β
и
равен углу
∝ ,
если ∝ ≤
π
2 или
π ∝ , если ∝ >
π
2
между нормальными векторами ⃗nλ и ⃗nβ этих
плоскостей. Так как при нахождении угла между плоскостями, из двух смежных
углов записывают значение не тупого угла, а косинусы смежных углов равны по
абсолютной величине, то косинус угла между плоскостями вычисляется по
формуле
cos φ = |cos ∝ | =
|⃗nλ∙⃗nβ|
|⃗nλ|∙|⃗nβ| .Чтобы найти угол между плоскостями
λ β
и
можно выполнить следующие
действия:
1. Ввести прямоугольную систему координат.
16
2. Найти координаты трех точек, не лежащих на одной прямой, и
принадлежащих плоскости
⃗nλ {A; B; C}.
. Найти координаты нормального вектора
λ
3. Найти координаты трех точек, не лежащих на одной прямой и принадлежащих
плоскости
⃗nβ {A; B; C}.
. Найти координаты нормального вектора
β
4. Вычислить косинус угла между плоскостями
λ β
и
, воспользовавшись
формулой cos
= φ
|⃗nλ∙⃗nβ|
|⃗nλ|∙|⃗nβ| .
Искомый угол между плоскостями равен
= φ arccos
|⃗nλ∙⃗nβ|
|⃗nλ|∙|⃗nβ| .
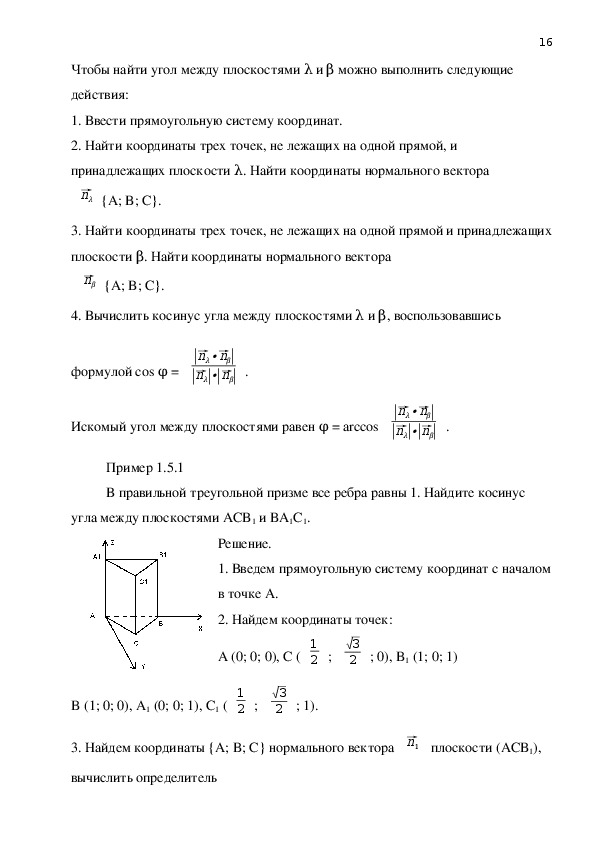
Пример 1.5.1
В правильной треугольной призме все ребра равны 1. Найдите косинус
угла между плоскостями ACB1 и BA1C1.
Решение.
1. Введем прямоугольную систему координат с началом
в точке А.
2. Найдем координаты точек:
A (0; 0; 0), C (
1
2 ;
√3
2 ; 0), B1 (1; 0; 1)
B (1; 0; 0), A1 (0; 0; 1), C1 (
1
2 ;
√3
2 ; 1).
3. Найдем координаты {A; B; C} нормального вектора ⃗n1 плоскости (ACB1),
вычислить определитель|x y z
1| = x |√3
√3
2
0
1
2
1
2
0
0
0
1| y |1
1 1| + z |1
2 0
2
1
17
√3
2
0| =
√3
2 x
1
2 y
√3
2
z=0
Уравнение плоскости (ACB1) имеет вид:
√3 x – y √3 z = 0.
⃗n1 { √3 ; 1; √3 }.
4. Найдем координаты {A; B; C} нормального вектора ⃗n2 плоскости (BA1C1),
вычислив определитель
1
|x−1 y z
0−1
0
2−1 √3
1
2
1| = (x – 1)∙ | 0
√3
2
1
1| y |−1 1
−1
2
1| + z |−1
−1
2
0
√3
2| =
−√3
2
=
1
2 y
√3
2 z +
√3
2 = 0
x +
Уравнение плоскости (BA1C1) имеет вид:
√3 x – y + √3 z √3 = 0
⃗n2 { √3 ; 1; √3 }.
|⃗n1∙⃗n2|
|⃗n1|∙|⃗n2|
5. cos∝ =
cos∝ =
|√3∙√3−1∙(−1)−√3∙√3|
√(√3)2+(−1)2+(−√3)2∙√(√3)2+(−1)2+(√3)2
1
7
=
Ответ:
1
7 .
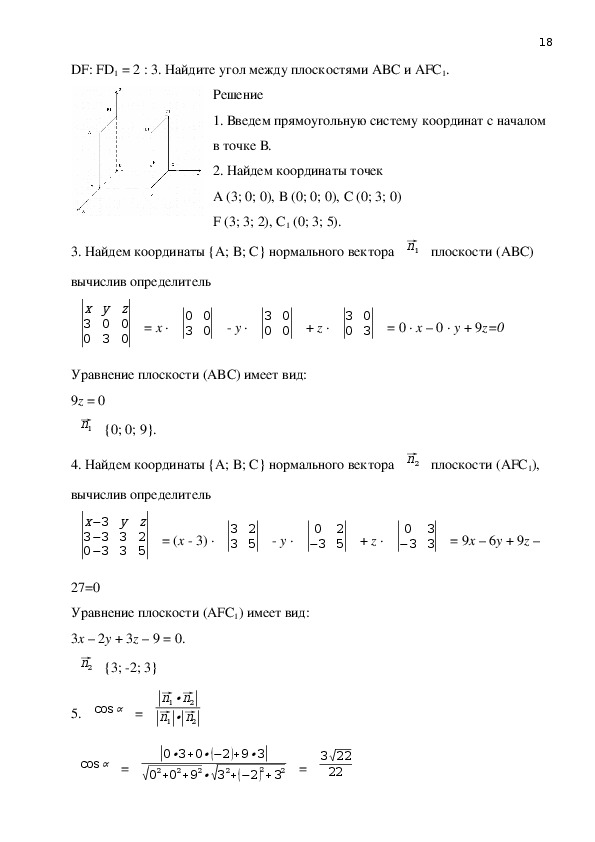
Пример 1.5.2
В правильной четырехугольной призме ABCDA1B1C1D1 стороны основания
равны 3, а боковые ребра равны 5. На ребре DD1 отмечена точка F так, чтоDF: FD1 = 2 : 3. Найдите угол между плоскостями ABC и AFC1.
Решение
1. Введем прямоугольную систему координат с началом
18
в точке В.
2. Найдем координаты точек
A (3; 0; 0), B (0; 0; 0), C (0; 3; 0)
F (3; 3; 2), C1 (0; 3; 5).
3. Найдем координаты {A; B; C} нормального вектора ⃗n1 плоскости (ABC)
вычислив определитель
|x y z
0 3 0| = x ∙ |0 0
3 0 0
3 0| y ∙ |3 0
0 0| + z ∙ |3 0
0 3| = 0 ∙ x – 0 ∙ y + 9z=0
Уравнение плоскости (ABC) имеет вид:
9z = 0
⃗n1 {0; 0; 9}.
4. Найдем координаты {A; B; C} нормального вектора ⃗n2 плоскости (AFC1),
вычислив определитель
|x−3 y z
0−3 3 5| = (x 3) ∙ |3 2
3−3 3 2
3 5| y ∙ | 0 2
−3 5| + z ∙ | 0 3
−3 3| = 9x – 6y + 9z –
27=0
Уравнение плоскости (AFC1) имеет вид:
3x – 2y + 3z – 9 = 0.
⃗n2 {3; 2; 3}
5. cos∝ =
|⃗n1∙⃗n2|
|⃗n1|∙|⃗n2|
cos∝ =
|0∙3+0∙(−2)+9∙3|
√02+02+92∙√32+(−2)2+32
3√22
22
=Значит, искомый угол равен arccos
3√22
22
Ответ: arccos
3√22
22
.
19
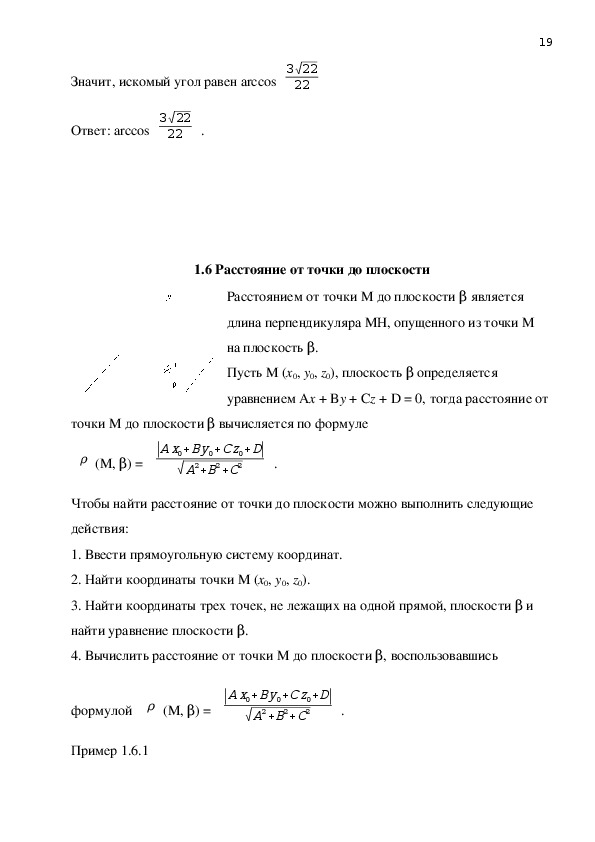
1.6 Расстояние от точки до плоскости
Расстоянием от точки М до плоскости
β
является
длина перпендикуляра МН, опущенного из точки М
на плоскость
.β
Пусть М (x0, y0, z0), плоскость
β
определяется
уравнением Ax + By + Cz + D = 0, тогда расстояние от
точки М до плоскости
β
вычисляется по формуле
ρ (M, ) = β
|Ax0+By0+Cz0+D|
√A2+B2+C2
.
Чтобы найти расстояние от точки до плоскости можно выполнить следующие
действия:
1. Ввести прямоугольную систему координат.
2. Найти координаты точки М (x0, y0, z0).
3. Найти координаты трех точек, не лежащих на одной прямой, плоскости
найти уравнение плоскости
.β
4. Вычислить расстояние от точки М до плоскости
β
, воспользовавшись
и β
формулой ρ (M, ) = β
|Ax0+By0+Cz0+D|
√A2+B2+C2
.
Пример 1.6.1В правильной шестиугольной пирамиде SABCDEF ребра основания равны 1,
боковые ребра равны 2. Найдите расстояние от точки А до плоскости EDS.
20
Решение
1. Введем прямоугольную систему координат с началом в
точке D.
2. Найдем координаты точек
A (2; 0; 0), E (
1
2 ;
√3
2 ; 0), D (0; 0; 0).
Найдем OS из прямоугольного треугольника SOD.
По теореме Пифагора OS = √4−1 = √3 .
S (1; 0; √3 ).
3. Найдем уравнение плоскости (EDS), вычислив определитель:
|x y z
√3| = x ∙ |√3
√3
2
0
1
2
1
2
0
0
0
√3| y ∙ |1
1 √3| + z ∙ |1
2 0
2
1
−√3
2
0 | =
3
2 x
√3
2
√3
2 z=0
y +
Уравнение плоскости (EDS) имеет вид:
3x √3 y + √3 z=0
4. ρ (M, β) =
|Ax0+By0+Cz0+D|
√A2+B2+C2
ρ (M, ) = β
|3∙2|
√9+3+3 =
6
√15 =
6√15
15
2√15
5
.
=
Ответ:
2√15
5
.
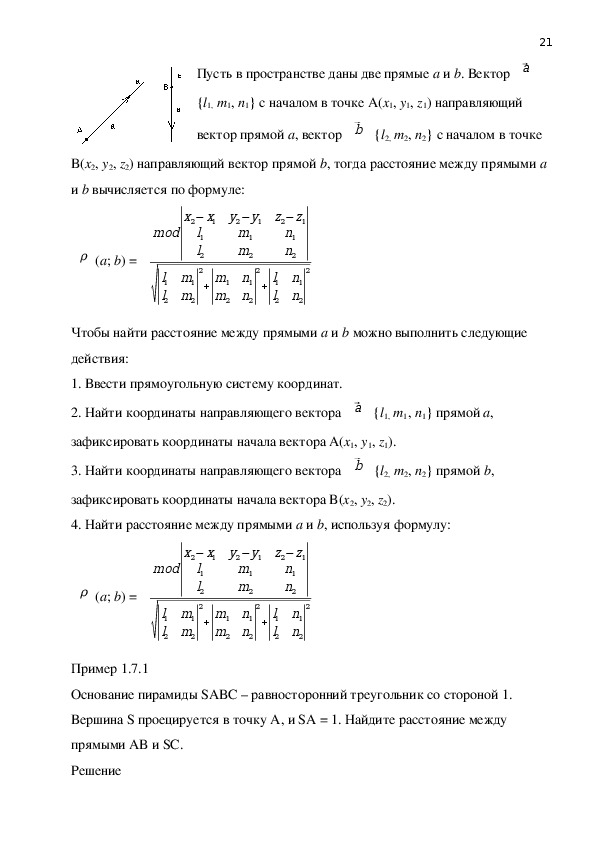
1.7 Расстояние между двумя прямыми21
Пусть в пространстве даны две прямые а и b. Вектор ⃗a
{l1, m1, n1} с началом в точке A(x1, y1, z1) направляющий
⃗b {l2, m2, n2} с началом в точке
B(x2, y2, z2) направляющий вектор прямой b, тогда расстояние между прямыми а
вектор прямой а, вектор
и b вычисляется по формуле:
ρ (a; b) =
l1
l2
mod|x2−x1 y2−y1 z2−z1
n2 |
√|l1 m1
+|l1 n1
l2 m2|2
l2 n2|2
+|m1 n1
m2 n2|2
m1
m2
n1
Чтобы найти расстояние между прямыми а и b можно выполнить следующие
действия:
1. Ввести прямоугольную систему координат.
2. Найти координаты направляющего вектора ⃗a {l1, m1, n1} прямой а,
зафиксировать координаты начала вектора A(x1, y1, z1).
3. Найти координаты направляющего вектора
⃗b {l2, m2, n2} прямой b,
зафиксировать координаты начала вектора B(x2, y2, z2).
4. Найти расстояние между прямыми а и b, используя формулу:
l1
l2
mod|x2−x1 y2−y1 z2−z1
n2 |
√|l1 m1
+|l1 n1
l2 m2|2
l2 n2|2
+|m1 n1
m2 n2|2
m1
m2
n1
ρ (a; b) =
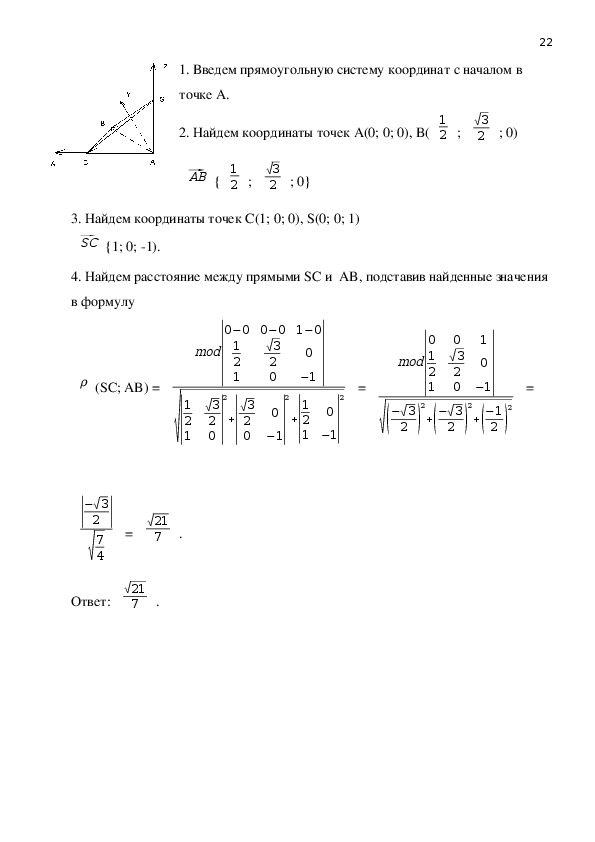
Пример 1.7.1
Основание пирамиды SABC – равносторонний треугольник со стороной 1.
Вершина S проецируется в точку А, и SA = 1. Найдите расстояние между
прямыми AB и SC.
Решение22
1. Введем прямоугольную систему координат с началом в
точке А.
2. Найдем координаты точек A(0; 0; 0), B(
1
2 ;
√3
2 ; 0)
⃗AB {
1
2 ;
√3
2 ; 0}
3. Найдем координаты точек C(1; 0; 0), S(0; 0; 1)
⃗SC {1; 0; 1).
4. Найдем расстояние между прямыми SC и AB, подставив найденные значения
в формулу
ρ (SC; AB) =
√|1
2
1
|−√3
2 |
√ 7
4
√21
7
.
=
Ответ:
√21
7
.
0
1
2
1
√3
2
0
mod|0−0 0−0 1−0
−1|
+|√3
0|2
0 −1|2
+|1
1 −1|2
√3
2
2
0
0
2
mod|0
√(−√3
2 )2
1
2
1
0
√3
2
0 −1|
1
0
=
+(−√3
2 )2
+(−1
2 )2
=23
Заключение
Координатно – векторный метод является достаточно простым в
применении. Данный метод является необходимой составляющей решения задач
различного уровня. Использование рассмотренного метода, позволяет
значительно упростить и сократить процесс решения некоторых задач.
В данной работе:
описан координатно – векторный метод;
систематизирован теоретический материал по данной теме;
рассмотрены виды и этапы решения некоторых задач данным методом;
представлена подборка задач, которые можно решить координатно –
векторным методом.24
Список использованных источников
1. Геометрия. Готовимся к ЕГЭ.11 класс: пособие для учащихся общеобразоват.
учреждений/ В.Н. Литвиненко. М.: Просвещение, 2012. 160с.
2. Геометрия. 10 кл.: Учеб. Для общеобразоват. учреждений с углубл. и
профильным изучением математики/ Е.В. Потоскуев, Л.И. Звавич. – 6е изд. –
М.: Дрофа, 2008.227с.
3. Геометрия. 11 кл.: Учеб. Для общеобразоват. учреждений с углубл. и
профильным изучением математики/ Е.В. Потоскуев, Л.И. Звавич. – 2е изд.,
испр. – М.: Дрофа, 2004.368с.
4. Геометрия. 1011 класс: учеб. для учащихся общеобразоват. учреждений
(базовый и профильный уровни)/ И.М. Смирнова, В.А. Смирнов. 5е изд., испр.
и доп. М.: Мнемозина, 2008. 288с.
5. Геометрия. Расстояния и углы в пространстве/ И.М. Смирнова, В.А. Смирнов.
– 3е изд., перераб. и доп. – М.: Издательство «Экзамен», 2011. – 158с.
6. Калинин А.Ю., Терёшин Д.А. Геометрия. 1011 классы. – Новое изд., испр. и
доп. – М.: МЦНМО, 2011. – 640с.
7. Погорелов А.В. Геометрия: Учеб. для 1011 кл. общеобразоват. учреждений:
базовый и профильный уровни. – М.: Просвещение, 2009. – 178 с.
8. Шарыгин И.Ф. Геометрия. 1011 кл.: Учеб. для общеобразоват. учеб.
заведений. – М.: Дрофа, 1999. – 208с.
9. Математика. Подготовка к ЕГЭ – 2013: учебно – методическое пособие / Под
редакцией Ф.Ф. Лысенко, С.Ю. Кулабухова. – РостовнаДону: Легион, 2012. –
416с.
10. Геометрия: Учеб. для 1011 кл. сред. шк./ Л.С. Атанасян, В.Ф. Бутузов, С.Б.
Кадомцев и др. – М.: Просвещение, 2009 – 255 с.25
11. Бардушкин В.В., Прокофьев А.А. Обобщающее повторение темы «Решение
заданий С2 координатно векторным способом». Часть 1// Математика в школе,
2012 №10. с.9 – 15.
12. Бардушкин В.В., Прокофьев А.А. Обобщающее повторение темы «Решение
заданий С2 координатно векторным способом». Часть 2// Математика в школе,
2013 №1. – с.1116
13. http:// wikipedia.org/
14. http://nsportal.ru/
15. http://rudocs.exdat.com/
16. http://lycc1546.mskobr.ru/