Программа «Робототехника» научно-технической направленности, ориентирована на реализацию интересов детей в сфере конструирования, моделирования, развитие их информационной и технологической культуры. Программа соответствует уровню основного общего образования, направлена на формирование познавательной мотивации, определяющей установку на продолжение образования; приобретение опыта продуктивной творческой деятельности.
Актуальность и педагогическая целесообразность программы
В период перехода современного общества от индустриальной к информационной экономике, от традиционной технологии к гибким наукоёмким производственным комплексам исключительно высокие темпы развития наблюдаются в сфере робототехники. По последним данным, сегодня в мире работают 1,8 млн. самых различных роботов - промышленных, домашних, роботов-игрушек. Век накопления знаний и теоретической науки сменяется новой эпохой – когда всевозможные роботы и механизмы заполняют мир. Потребности рынка труда в специалистах технического профиля и повышенные требования современного бизнеса в области образовательных компетентностей, выдвигают актуальную задачу обучения детей основам радиоэлектроники и робототехники.
Пояснительная записка
Программа «Робототехника» научнотехнической направленности,
ориентирована на реализацию интересов детей в сфере конструирования,
моделирования, развитие их информационной и технологической культуры.
Программа соответствует уровню основного общего образования, направлена
на формирование познавательной мотивации, определяющей установку на
продолжение образования; приобретение опыта продуктивной творческой
деятельности.
Актуальность и педагогическая целесообразность программы
В период перехода современного общества от индустриальной к
информационной экономике, от традиционной технологии к гибким наукоёмким
производственным комплексам исключительно высокие темпы развития
наблюдаются в сфере робототехники. По последним данным, сегодня в мире
работают 1,8 млн. самых различных роботов промышленных, домашних,
роботовигрушек. Век накопления знаний и теоретической науки сменяется
новой эпохой – когда всевозможные роботы и механизмы заполняют мир.
Потребности рынка труда в специалистах технического профиля и повышенные
требования современного бизнеса в области образовательных компетентностей,
выдвигают актуальную задачу обучения детей основам радиоэлектроники и
робототехники. Технологическое образование является одним из важнейших
компонентов подготовки подрастающего поколения к самостоятельной жизни.
Деятельностный характер технологического образования, направленность
содержания на формирование учебных умений и навыков, обобщенных способов
учебной,
творческой
деятельности позволяет формировать у школьников способность
ориентироваться в окружающем мире и подготовить их к продолжению
образования в учебных заведениях любого типа. Актуальность и мотивация для
выбора подростками данного вида деятельности является практическая
направленность программы, возможность углубления и систематизации знаний
из курса основного образования. Работа с образовательными конструкторами
MINDSTORM EV3 позволяет школьникам в форме познавательной игры узнать
многие важные идеи и развить необходимые в дальнейшей жизни навыки.
Занятия по программе «Робототехника» формируют специальные технические
умения, развивают аккуратность, усидчивость, организованность, нацеленность
коммуникативной,
познавательной,
практической,
Проведение краевых массовых мероприятий научнотехнической
направленности показывает все большую представленность детских проектов по
тематике «робототехника и конструирование», в том числе и по LEGOробототехнике.
Цель программы:
развитие научнотехнического и творческого
потенциала личности ребенка путем организации его деятельности в процессе
интеграции начального инженернотехнического конструирования и основ
робототехники.
Задачи программы:
углубление знаний по основным принципам механики;
ознакомление с основами программирования в компьютерной среде
MINDSTORMS EV3 на языках EV3G и Robolab;
развитие умения творчески подходить к решению задачи;
развитие умения довести решение задачи до работающей модели;
развитие умения излагать мысли в четкой логической
последовательности, отстаивать свою точку зрения, анализировать ситуацию и
самостоятельно находить ответы на вопросы путем логических рассуждений.
Отличительные особенности программы
Реализация программы осуществляется с использование методических
пособий, специально разработанных фирмой LEGO для преподавания
технического конструирования на основе своих конструкторов. Настоящий
курс предлагает использование образовательных конструкторов
MINDSTORMS EV3 как инструмента для обучения школьников
конструированию, моделированию и компьютерному управлению на уроках
робототехники. Простота в построении модели в сочетании с большими
конструктивными возможностями конструктора позволяют детям в конце
урока увидеть сделанную своими руками модель, которая выполняет
поставленную ими же самими задачу. При построении модели затрагивается
множество проблем из разных областей знания – от теории механики до
психологии.
Курс предполагает использование компьютеров и специальных
интерфейсных блоков совместно с конструкторами. Важно отметить, что
компьютер используется как средство управления моделью; его
использование направлено на составление управляющих алгоритмов для
собранных моделей. Учащиеся получают представление об особенностях
составления программ управления,
автоматизации механизмов,
моделировании работы систем. Методические особенности реализации
программы предполагают сочетание возможности развития индивидуальныхтворческих способностей и формирование умений взаимодействовать в
коллективе, работать в группе. Программа предполагает возможность участия
детей трёх возрастных групп. Ведущие типы деятельности детей среднего
школьного возраста обуславливают включение их в коллективную творческую
деятельность, использование таких педагогических технологий как обучение
в сотрудничестве, проектные методы обучения, технологию использования в
обучении игровых методов, информационнокоммуникационные технологии.
Выполнение практических работ и подготовка к состязаниям роботов
(проектирование, конструирование, программирование, испытание и запуск
модели робота) требует консультирования педагога, тщательной подготовки
и соблюдения правил техники безопасности. Поэтому есть необходимость в
организации занятий по подгруппам с учётом индивидуальных особенностей
детей разных возрастных категорий (младшая – 912 лет, средняя – 1215 лет,
старшая – 1517 лет). Одно из двух занятий в объединении организуется по
подгруппам.
Возраст детей, участвующих в реализации программы
Программа предусматривает занятия с учащимися 917 лет. Содержание
программы предполагает, что дети уже знакомы с такими понятиями как:
простые механизмы, у них развито элементарное конструкторское мышление,
они понимают принципы работы многих механизмов.
Сроки реализации программы, режим занятий
Программа рассчитана 1 год обучения. Годовая нагрузка на ученика
составляет 144 часа. Режим занятий соответствует нормам и требованиям САН
ПиН: два раза в неделю по два академических часа с десятиминутным
перерывом.
Формы и режимы занятий
При проведении занятий используются следующие формы работы:
лекционная (получение учащимися нового материала);
самостоятельная (ученики выполняют индивидуальные задания в течение
части занятия или одногодвух занятий);
проектная деятельность (получение новых знаний, реализация личных
проектов);
соревнования (практическое участие детей в разнообразных мероприятияхпо техническому LEGOконструированию).
Ожидаемые результаты и способы определения результативности
По окончании программы учащийся должен:
знать основы механики, автоматики и программирования в среде
MINDSTORMS EV3 на языках EV3G и Robolab;
уметь собирать модели, используя готовую схему сборки, а также по
эскизу;
уметь создавать собственные проекты и при необходимости
программировать роботизированные модели.
Предъявляемым результатом будет:
Осуществление сборки не менее 5 моделей роботов;
Создание не менее двух индивидуальных конструкторских проектов;
Создание коллективного выставочного проекта;
Участие в соревнованиях и мероприятиях различного уровня.
Виды и формы контроля
индивидуальные задания;
контрольные задания;
личные проекты;
участие в соревнованиях и мероприятиях различного уровня.
Текущий контроль проходит в виде состязаний или выставки роботов,
оцениваемых по технологическим картам.
Итоговый контроль по темам проходит в виде состязаний роботов на
ежемесячных мероприятиях,
проводимых Ассоциацией развития
робототехники Красноярского края. Соревнования включают в себя
проектирование, создание и программирование робота, способного выполнить
поставленные задачи. Результаты контроля фиксируются в протоколах
состязаний. По каждому параметру разработаны критерии.
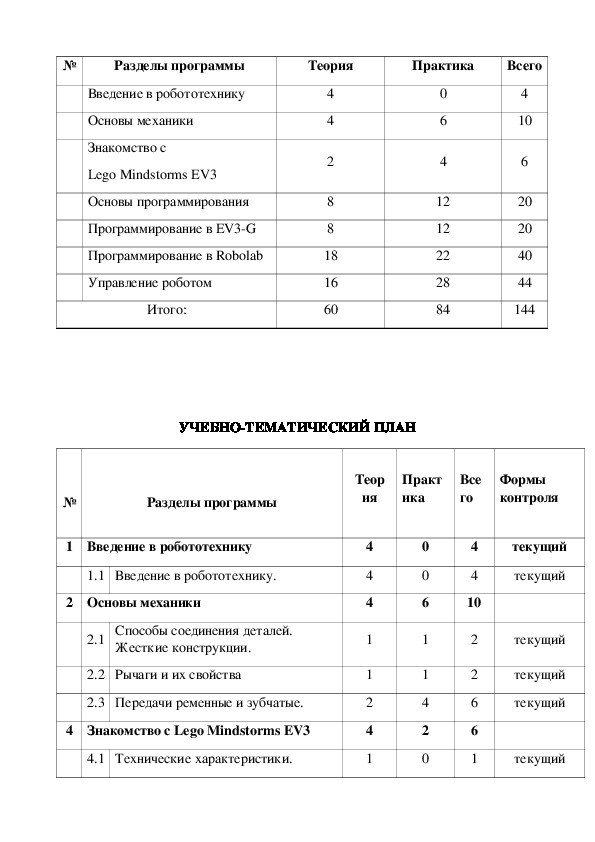
УЧЕБНЫЙ ПЛАН№
Разделы программы
Теория
Практика
Всего
Введение в робототехнику
Основы механики
Знакомство с
Lego Mindstorms EV3
Основы программирования
Программирование в EV3G
Программирование в Robolab
Управление роботом
Итого:
4
4
2
8
8
18
16
60
0
6
4
12
12
22
28
84
4
10
6
20
20
40
44
144
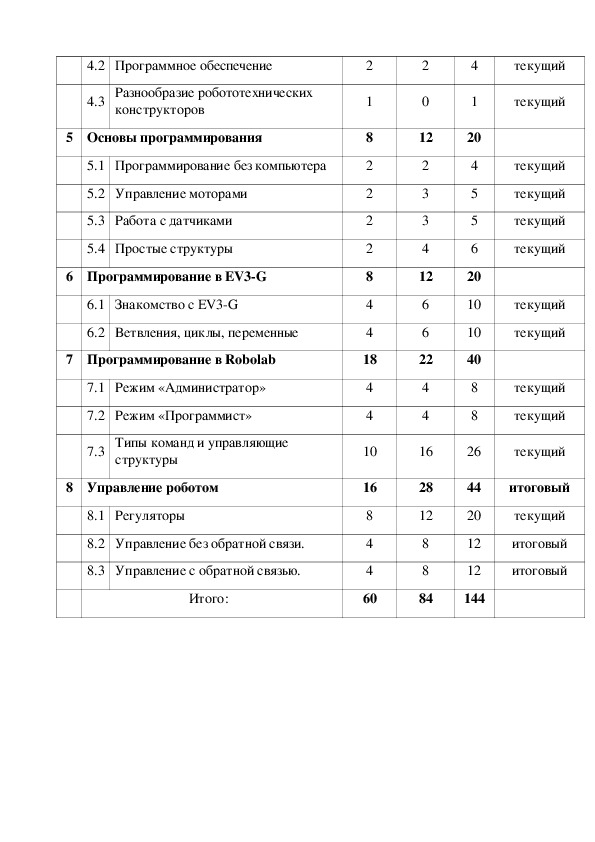
УЧЕБНОТЕМАТИЧЕСКИЙ ПЛАН
№
Разделы программы
1 Введение в робототехнику
1.1 Введение в робототехнику.
2 Основы механики
2.1 Способы соединения деталей.
Жесткие конструкции.
2.2 Рычаги и их свойства
2.3 Передачи ременные и зубчатые.
4 Знакомство с Lego Mindstorms EV3
4.1 Технические характеристики.
Теор
ия
Практ
ика
Все
го
Формы
контроля
4
4
4
1
1
2
4
1
0
0
6
1
1
4
2
0
4
4
10
2
2
6
6
1
текущий
текущий
текущий
текущий
текущий
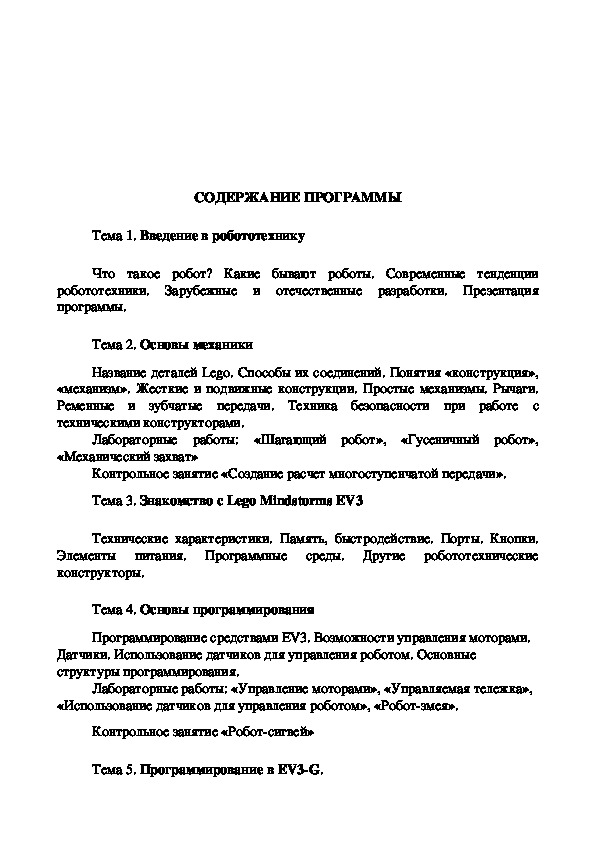
текущий4.2 Программное обеспечение
4.3
Разнообразие робототехнических
конструкторов
5 Основы программирования
5.1 Программирование без компьютера
5.2 Управление моторами
5.3 Работа с датчиками
5.4 Простые структуры
6 Программирование в EV3G
6.1 Знакомство с EV3G
6.2 Ветвления, циклы, переменные
7 Программирование в Robolab
7.1 Режим «Администратор»
7.2 Режим «Программист»
7.3
Типы команд и управляющие
структуры
8 Управление роботом
8.1 Регуляторы
8.2 Управление без обратной связи.
8.3 Управление с обратной связью.
Итого:
2
1
8
2
2
2
2
8
4
4
18
4
4
10
16
8
4
4
60
2
0
12
2
3
3
4
12
6
6
22
4
4
16
28
12
8
8
84
текущий
текущий
текущий
текущий
текущий
текущий
текущий
текущий
текущий
текущий
текущий
итоговый
текущий
итоговый
итоговый
4
1
20
4
5
5
6
20
10
10
40
8
8
26
44
20
12
12
144СОДЕРЖАНИЕ ПРОГРАММЫ
Тема 1. Введение в робототехнику
Что такое робот? Какие бывают роботы. Современные тенденции
робототехники. Зарубежные и отечественные разработки. Презентация
программы.
Тема 2. Основы механики
Название деталей Lego. Способы их соединений. Понятия «конструкция»,
«механизм». Жесткие и подвижные конструкции. Простые механизмы. Рычаги.
Ременные и зубчатые передачи. Техника безопасности при работе с
техническими конструкторами.
Лабораторные работы:
«Шагающий робот», «Гусеничный робот»,
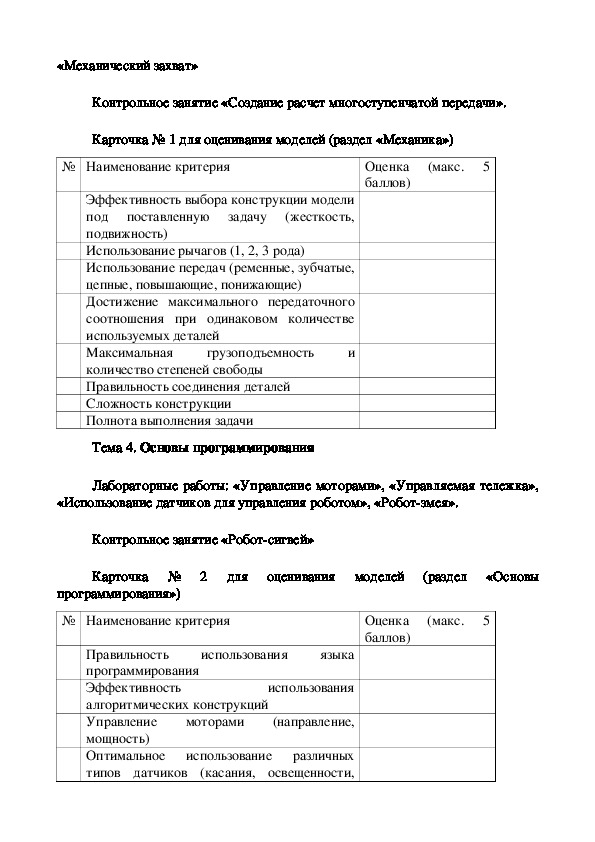
«Механический захват»
Контрольное занятие «Создание расчет многоступенчатой передачи».
Тема 3. Знакомство с Lego Mindstorms EV3
Технические характеристики. Память, быстродействие. Порты. Кнопки.
Другие робототехнические
Программные среды.
Элементы питания.
конструкторы.
Тема 4. Основы программирования
Программирование средствами EV3. Возможности управления моторами.
Датчики. Использование датчиков для управления роботом. Основные
структуры программирования.
Лабораторные работы: «Управление моторами», «Управляемая тележка»,
«Использование датчиков для управления роботом», «Роботзмея».
Контрольное занятие «Роботсигвей»
Тема 5. Программирование в EV3G.Язык программирования EV3G. Окно программы. Палитра команд.
Ветвления. Циклы. Переменные. Стандартные модели: Манипулятор, Скорпион,
Андроид.
Лабораторные работы: Манипулятор, Скорпион, Андроид.
Контрольное занятие «Движение по линии с использованием релейного
регулятора»
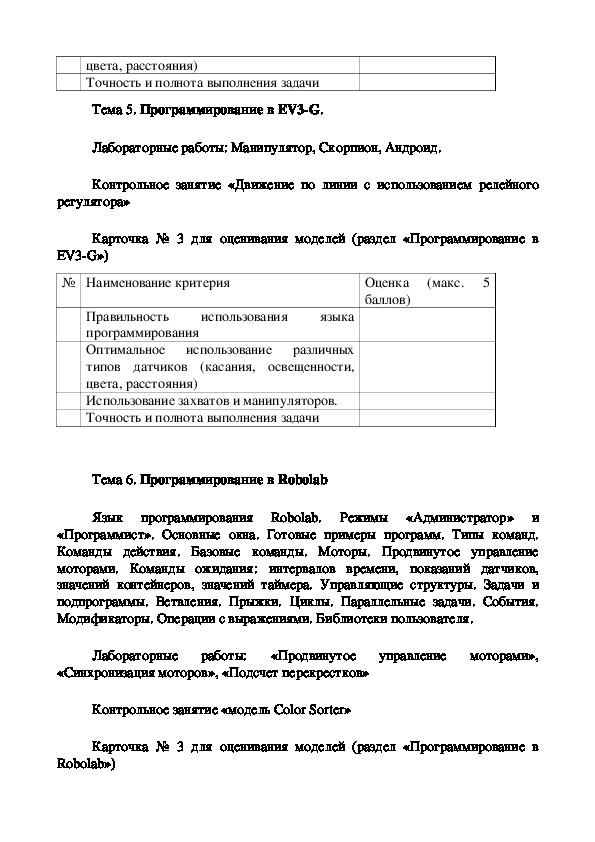
Тема 6. Программирование в Robolab
Режимы «Администратор»
Язык программирования Robolab.
и
«Программист». Основные окна. Готовые примеры программ. Типы команд.
Команды действия. Базовые команды. Моторы. Продвинутое управление
моторами. Команды ожидания: интервалов времени, показаний датчиков,
значений контейнеров, значений таймера. Управляющие структуры. Задачи и
подпрограммы. Ветвления. Прыжки. Циклы. Параллельные задачи. События.
Модификаторы. Операции с выражениями. Библиотеки пользователя.
Лабораторные работы:
«Продвинутое управление моторами»,
«Синхронизация моторов», «Подсчет перекрестков»
Контрольное занятие «модель Color Sorter»
Тема 7. Управление роботом
Управление моторами. Использование датчиков. Регуляторы: релейный,
пропорциональный, дифференциальный, интегральный. Движение по линии,
Движение вдоль стены. Управление без обратной связи. Управление с обратной
связью. Точные перемещения. Защита от застреваний. Объезд препятствий.
Фильтрация данных. Удаленное управление. Кодирование передачи данных.
Управление в пошаговом режиме. Обмен данными.
Лабораторные работы:
«Кегельринг», «Роботбарабанщик», «Объезд
препятствий», «Движение вдоль стены», «Обмен данными между роботами»,
Контрольное занятие «Маленький исследователь»
Список соревнований
«FIRST»,
«Робосуммо»,
«Траектория», «Роботальпинист», «Парковщик»
«Роборегби»,
WRO,
«Манипуляторы»,
3.Технологические карты
Тема 2. Основы механики
Лабораторные работы:
«Шагающий робот», «Гусеничный робот»,«Механический захват»
Контрольное занятие «Создание расчет многоступенчатой передачи».
Карточка № 1 для оценивания моделей (раздел «Механика»)
№ Наименование критерия
Оценка (макс.
баллов)
5
Эффективность выбора конструкции модели
под поставленную задачу (жесткость,
подвижность)
Использование рычагов (1, 2, 3 рода)
Использование передач (ременные, зубчатые,
цепные, повышающие, понижающие)
Достижение максимального передаточного
соотношения при одинаковом количестве
используемых деталей
Максимальная
количество степеней свободы
Правильность соединения деталей
Сложность конструкции
Полнота выполнения задачи
грузоподъемность
и
Тема 4. Основы программирования
Лабораторные работы: «Управление моторами», «Управляемая тележка»,
«Использование датчиков для управления роботом», «Роботзмея».
Контрольное занятие «Роботсигвей»
Карточка № 2 для оценивания моделей (раздел
«Основы
программирования»)
№ Наименование критерия
Оценка (макс.
баллов)
5
языка
использования
Правильность
программирования
Эффективность
алгоритмических конструкций
Управление
мощность)
Оптимальное использование различных
типов датчиков (касания, освещенности,
моторами
использования
(направление,цвета, расстояния)
Точность и полнота выполнения задачи
Тема 5. Программирование в EV3G.
Лабораторные работы: Манипулятор, Скорпион, Андроид.
Контрольное занятие «Движение по линии с использованием релейного
регулятора»
Карточка № 3 для оценивания моделей (раздел «Программирование в
EV3G»)
№ Наименование критерия
Оценка (макс.
баллов)
5
языка
использования
Правильность
программирования
Оптимальное использование различных
типов датчиков (касания, освещенности,
цвета, расстояния)
Использование захватов и манипуляторов.
Точность и полнота выполнения задачи
Тема 6. Программирование в Robolab
Режимы «Администратор»
Язык программирования Robolab.
и
«Программист». Основные окна. Готовые примеры программ. Типы команд.
Команды действия. Базовые команды. Моторы. Продвинутое управление
моторами. Команды ожидания: интервалов времени, показаний датчиков,
значений контейнеров, значений таймера. Управляющие структуры. Задачи и
подпрограммы. Ветвления. Прыжки. Циклы. Параллельные задачи. События.
Модификаторы. Операции с выражениями. Библиотеки пользователя.
Лабораторные работы:
«Продвинутое управление моторами»,
«Синхронизация моторов», «Подсчет перекрестков»
Контрольное занятие «модель Color Sorter»
Карточка № 3 для оценивания моделей (раздел «Программирование в
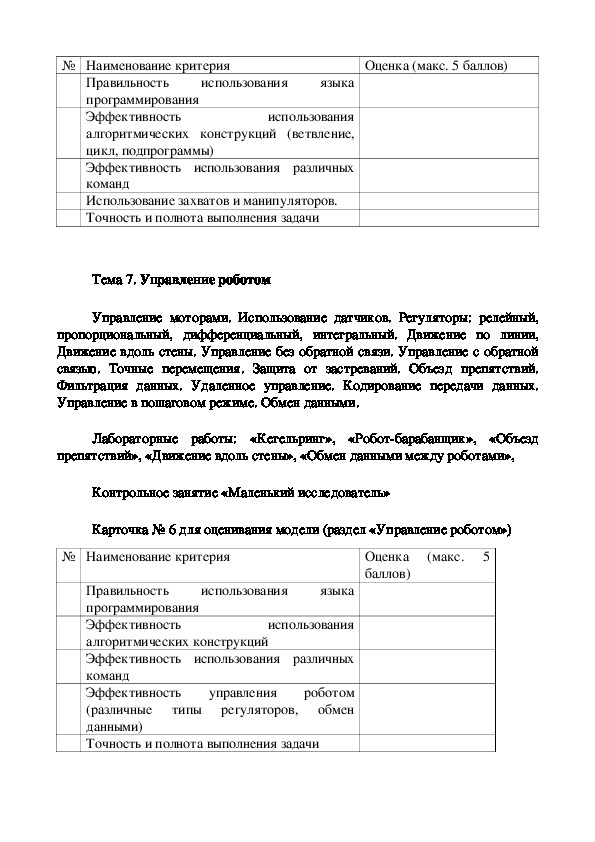
Robolab»)№ Наименование критерия
Оценка (макс. 5 баллов)
языка
использования
Правильность
программирования
Эффективность
использования
алгоритмических конструкций (ветвление,
цикл, подпрограммы)
Эффективность использования различных
команд
Использование захватов и манипуляторов.
Точность и полнота выполнения задачи
Тема 7. Управление роботом
Управление моторами. Использование датчиков. Регуляторы: релейный,
пропорциональный, дифференциальный, интегральный. Движение по линии,
Движение вдоль стены. Управление без обратной связи. Управление с обратной
связью. Точные перемещения. Защита от застреваний. Объезд препятствий.
Фильтрация данных. Удаленное управление. Кодирование передачи данных.
Управление в пошаговом режиме. Обмен данными.
Лабораторные работы:
«Кегельринг», «Роботбарабанщик», «Объезд
препятствий», «Движение вдоль стены», «Обмен данными между роботами»,
Контрольное занятие «Маленький исследователь»
Карточка № 6 для оценивания модели (раздел «Управление роботом»)
№ Наименование критерия
Оценка (макс.
баллов)
5
языка
использования
использования
Правильность
программирования
Эффективность
алгоритмических конструкций
Эффективность использования различных
команд
Эффективность
(различные типы регуляторов,
данными)
Точность и полнота выполнения задачи
управления роботом
обмен