Поделиться


Инструктаж по технике безопасности.

МЕХАНИКА Классическая механика Ньютона. Движение точки и тела. Положение точки в пространстве. Векторные величины. Проекция вектора на ось.

Цели и задачи:
Изучить понятия: тело отчета, радиус-вектор, проекция вектора, скалярная и векторная величина.
Разобрать способы сложения и вычитания векторов.

Домашняя работа:
Принести 2 тетради по 12 листов (для контрольных и лабораторных работ);
Параграфы №1-6. Читать, отвечать устно на вопросы.

Механическое движение – изменение положения тела в пространстве относительно других тел с течением времени.
Движение тел описывается законами механики.
Механика – наука об общих законах движения тел.
Кинематика (изучение движения тел, не рассматривая причин).
Динамика (причины, обуславливающие движение тел).
Классическая механика – механика, основанная на законах Ньютона.
Механика Ньютона справедлива для больших тел, если их скорость мала по сравнению со скоростью света.

Кинематика – это раздел механики, изучающий способы описания движения и связь между величинами, характеризующими эти движения. Описать движение тела – это значит указать способ определения его положения в пространстве в любой момент времени.

Чтобы решить задачу о движении точки, надо уметь задавать положение точки в пространстве.
Тело отчета – физическое тело, относительно которого задается положение данного тела или данной точки.
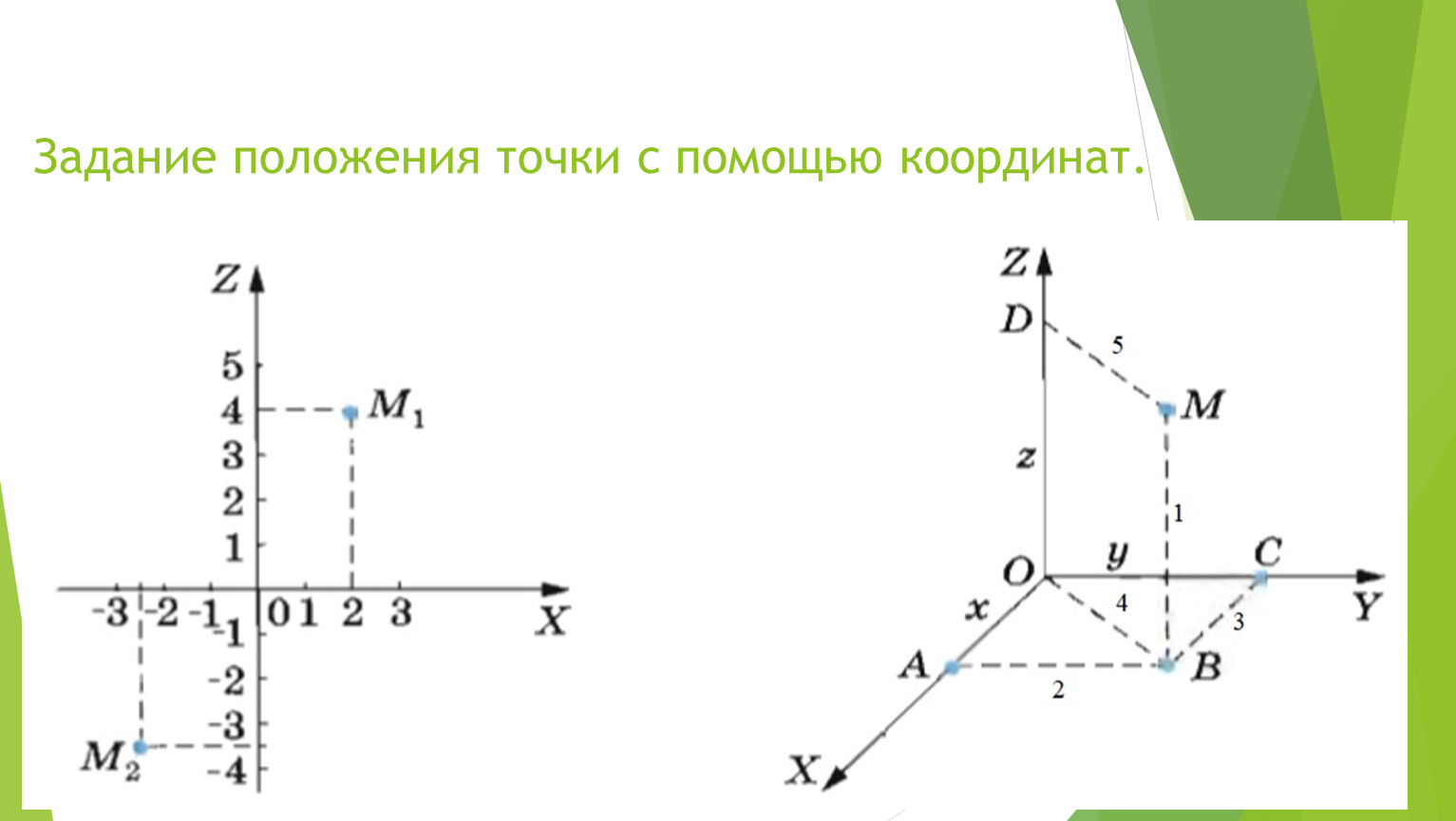
Задание положения точки с помощью координат.
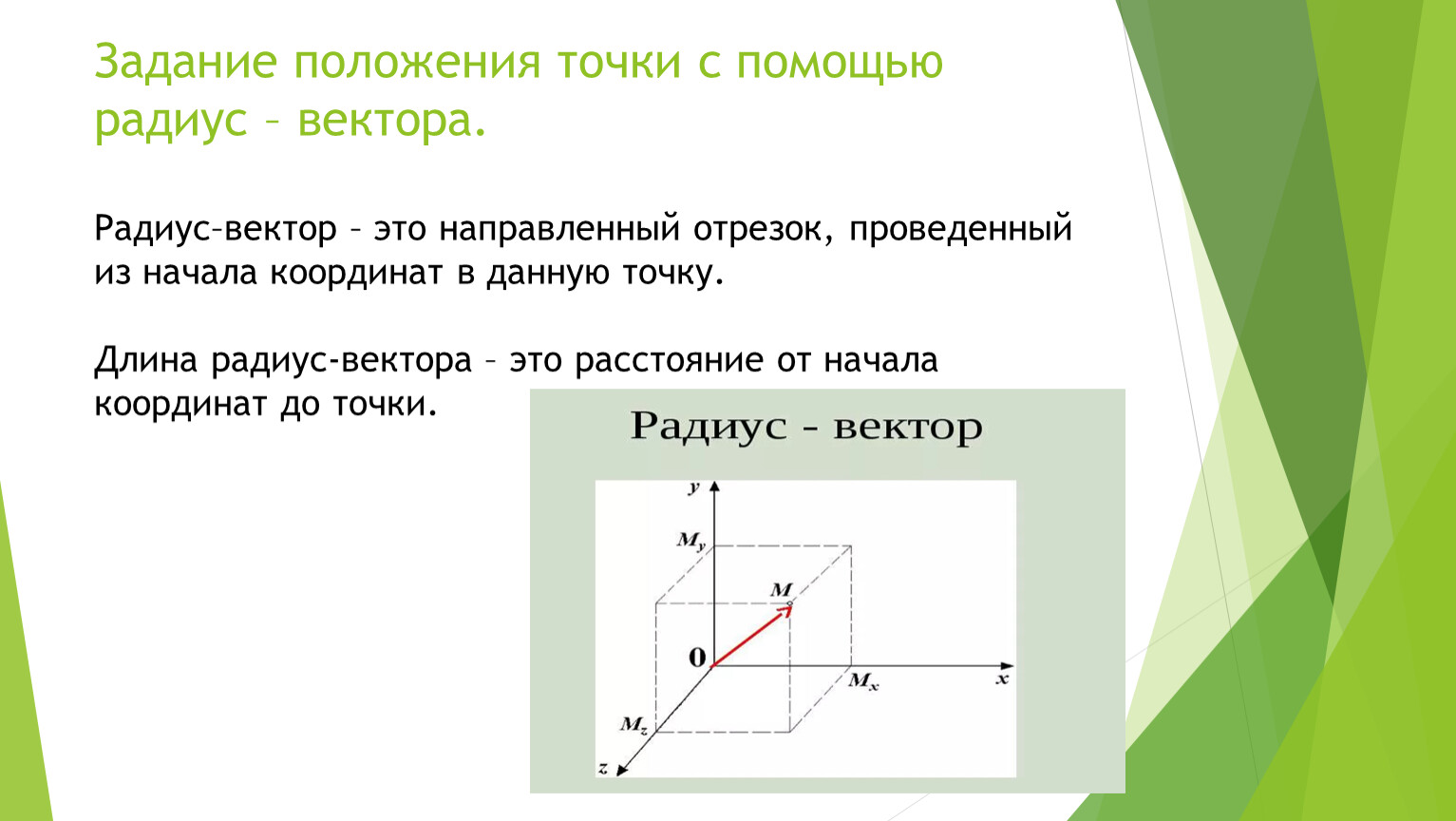
Задание положения точки с помощью радиус – вектора. Радиус–вектор – это направленный отрезок, проведенный из начала координат в данную точку. Длина радиус-вектора – это расстояние от начала координат до точки.

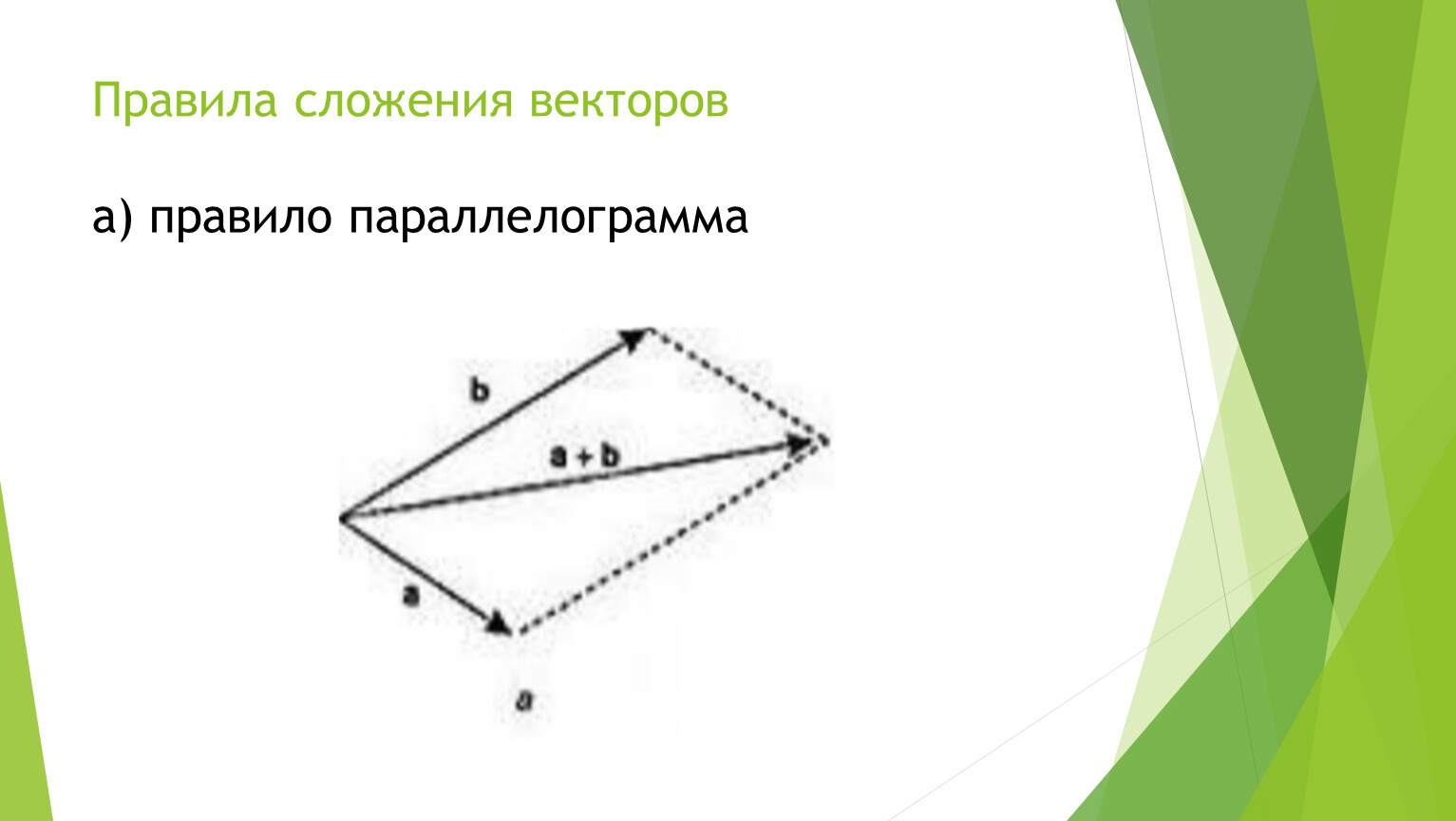
Правила сложения векторов а) правило параллелограмма
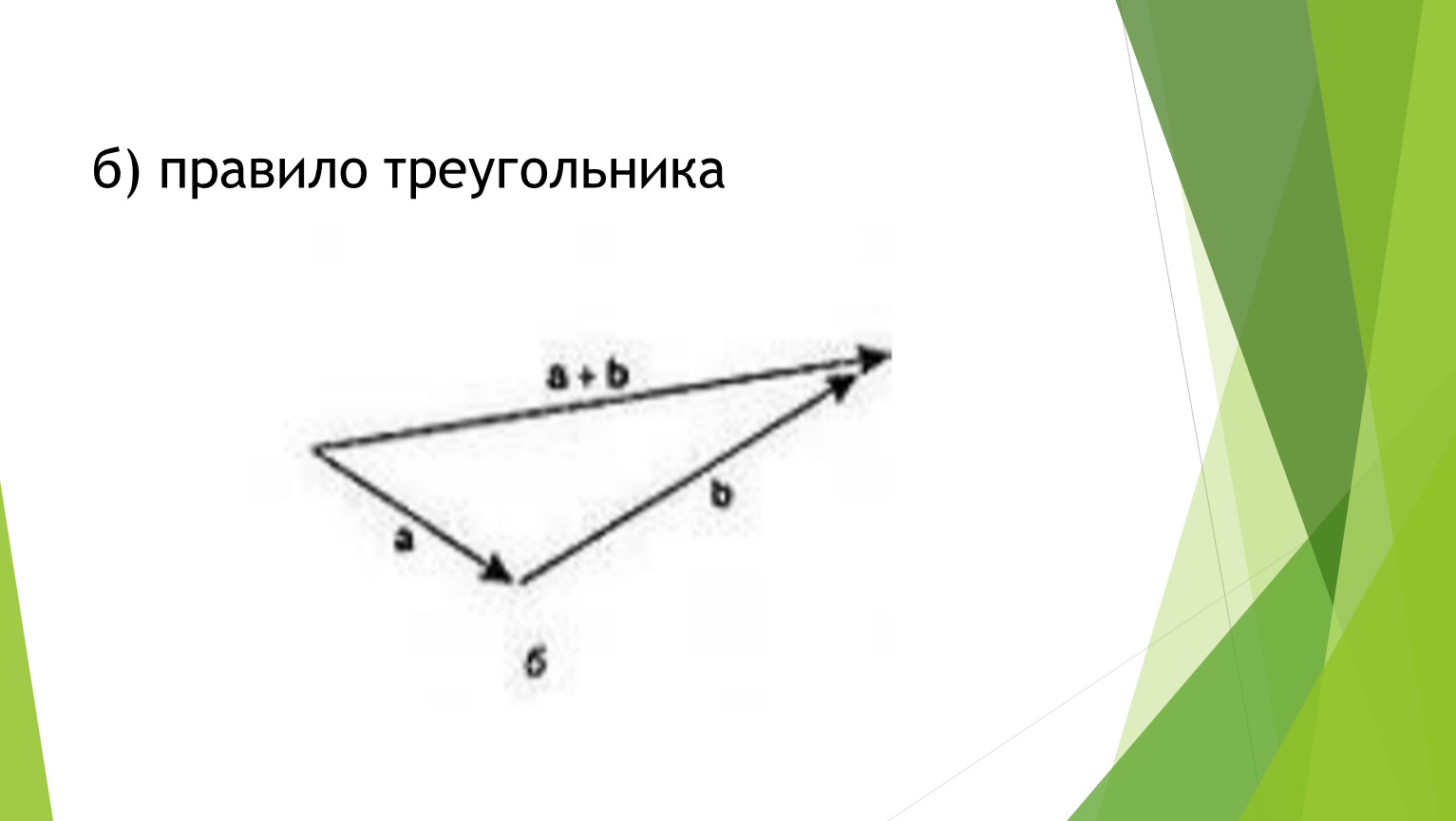
б) правило треугольника

в) Правило многоугольника
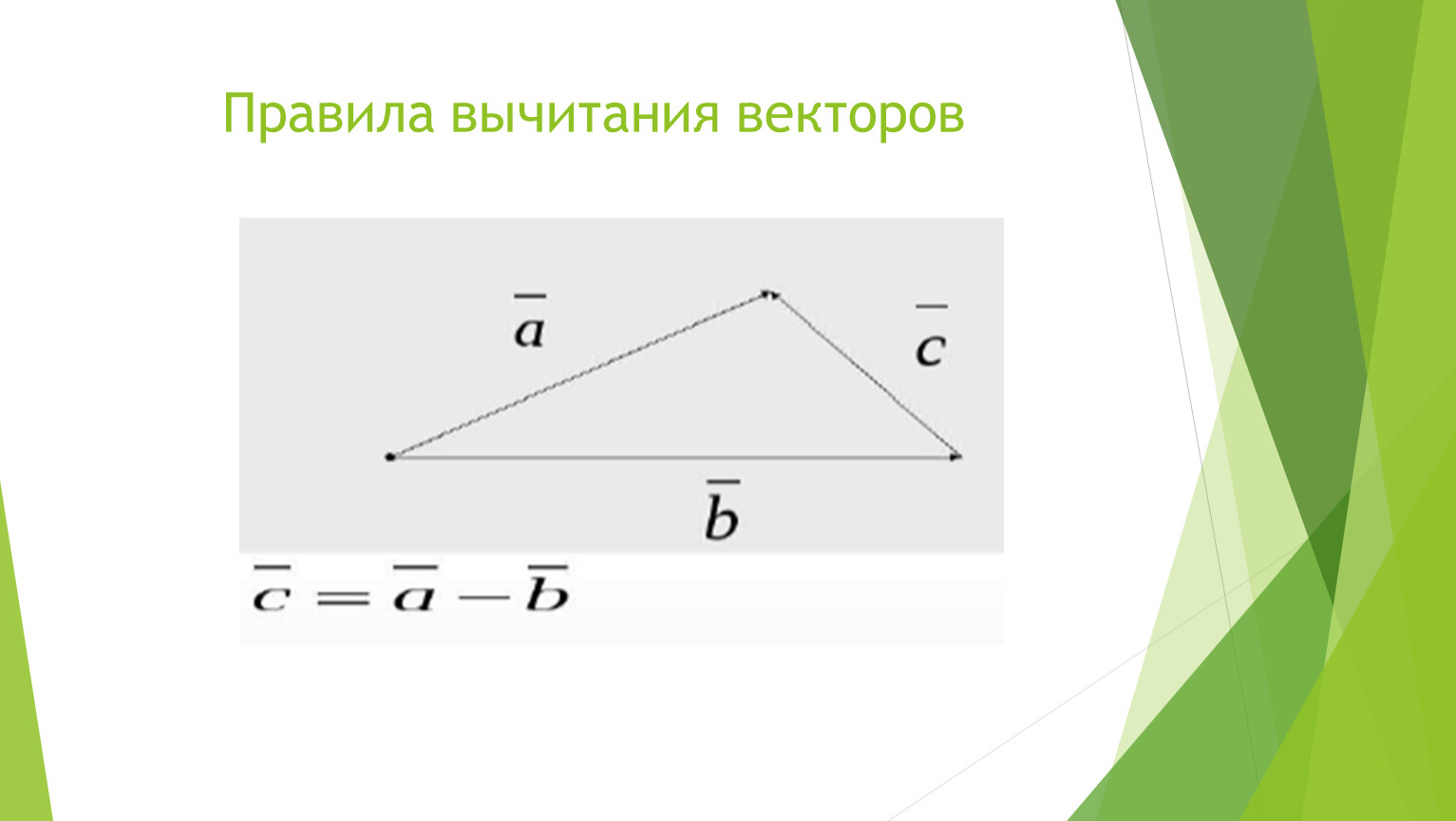
Правила вычитания векторов


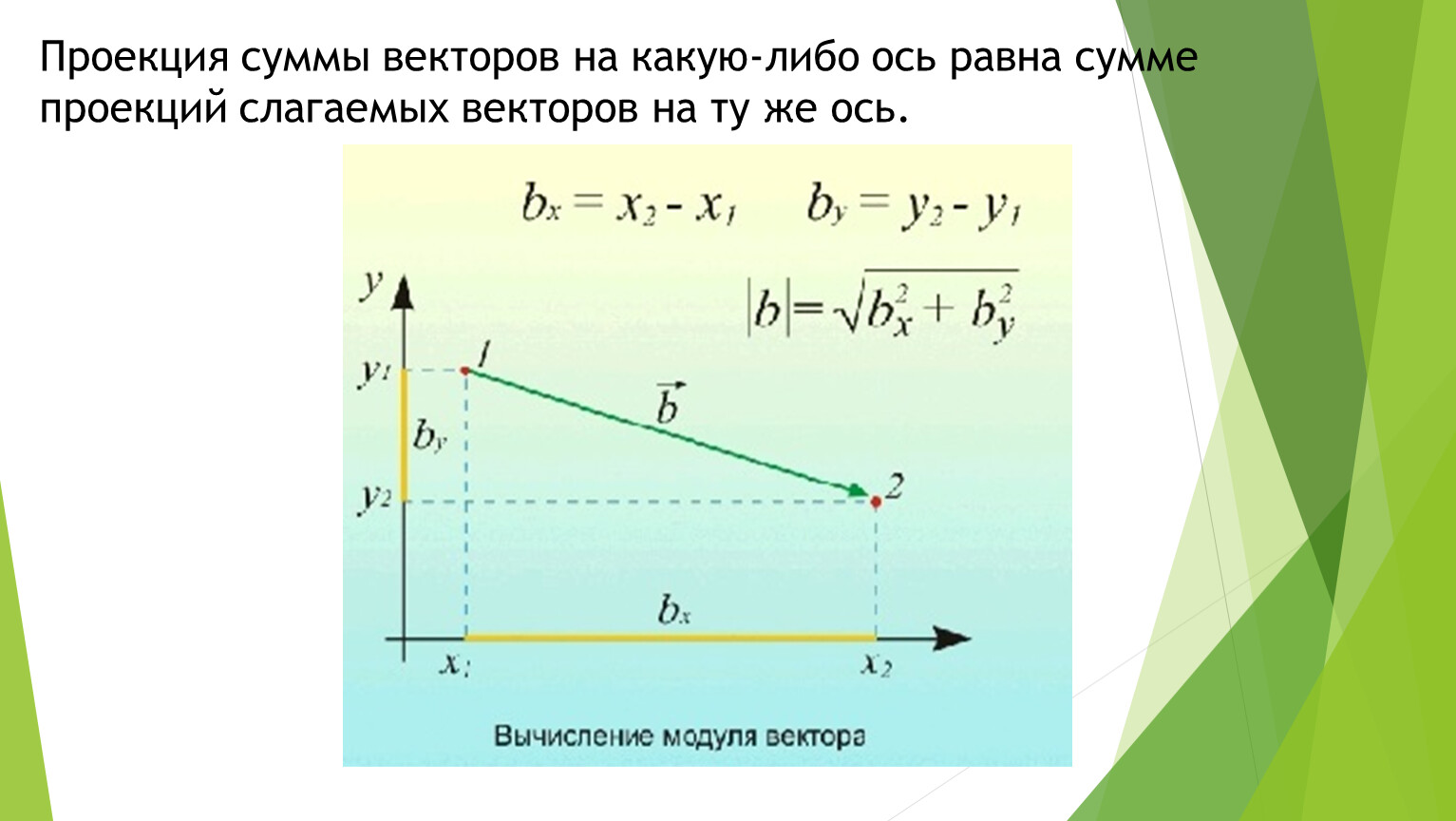
Проекция суммы векторов на какую-либо ось равна сумме проекций слагаемых векторов на ту же ось.

Закрепление:
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
