Практическое занятие проводится по профессиональному модулю Подготовка машин механизмов, приспособлений к работе, комплектование сборочных единиц
Тема : Теория поршневых ДВС.
Наименование : Динамический расчёт двигателя.
Норма времени – 2*45 = 90мин.
Задание – Произвести расчёт сил, действующих в кривошипно-шатунном механизме (КШМ), поршневого ДВС в следующем порядке
Расчётно практическое занятие № 3.1
Тема : Теория поршневых ДВС.
Наименование : Динамический расчёт двигателя.
Норма времени – 2*45 = 90мин.
Задание – Произвести расчёт сил, действующих в кривошипношатунном
механизме (КШМ), поршневого ДВС в следующем порядке :
1.Используя индикаторную и лучевую диаграммы определить текущее значение
давления газов в цилиндре [Рх(мпа)], в функции поворота коленчатого вала[αпкв]
2. Определить суммарную величину сил инерции, действующих в цилиндро
поршневой группе [Рϳ12 = Р 1ϳ + Р 2ϳ ] ;(кн), используя графический метод;
3. Расчитать текушее значение силы давления газов в функции от αпкв:
Рг = f(αпкв) ;
4. Расчитать текущее значение результирующей силы, действующей на днище
поршня и поршневой палец :
Ррез.= Р г± Р 12ϳ
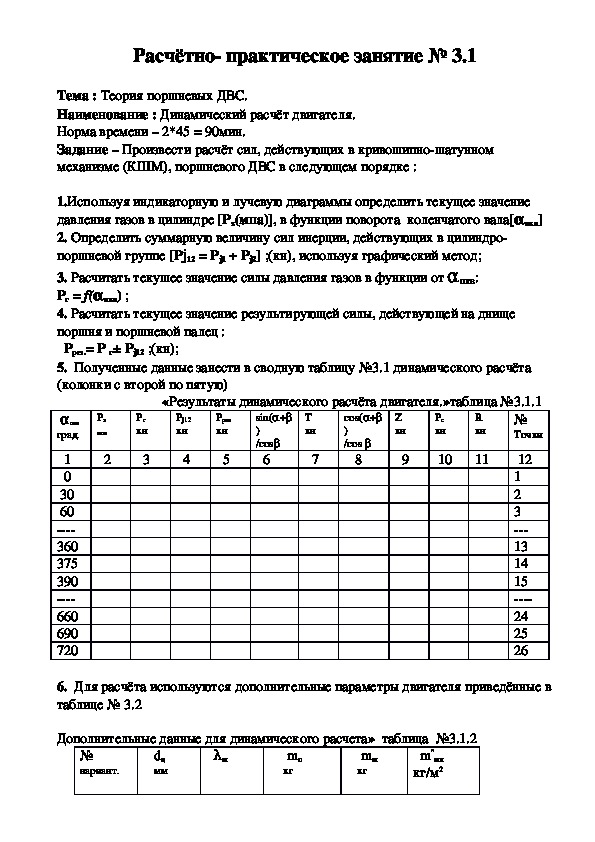
5. Полученные данные занести в сводную таблицу №3.1 динамического расчёта
(колонки с второй по пятую)
«Результаты динамического расчёта двигателя.»таблица №3.1.1
αпкв
град.
№
Точки
;(кн);
Рг
кн
Р 12ϳ
кн
Ррез
кн
Рх
мпа
Z
кн
Рс
кн
R
кн
sin(α+β
)
/cosβ
6
Т
кн
7
cos(α+β
)
/cos β
8
2
3
4
5
1
0
30
60
360
375
390
660
690
720
9
10
11
12
1
2
3
13
14
15
24
25
26
6. Для расчёта используются дополнительные параметры двигателя приведённые в
таблице № 3.2
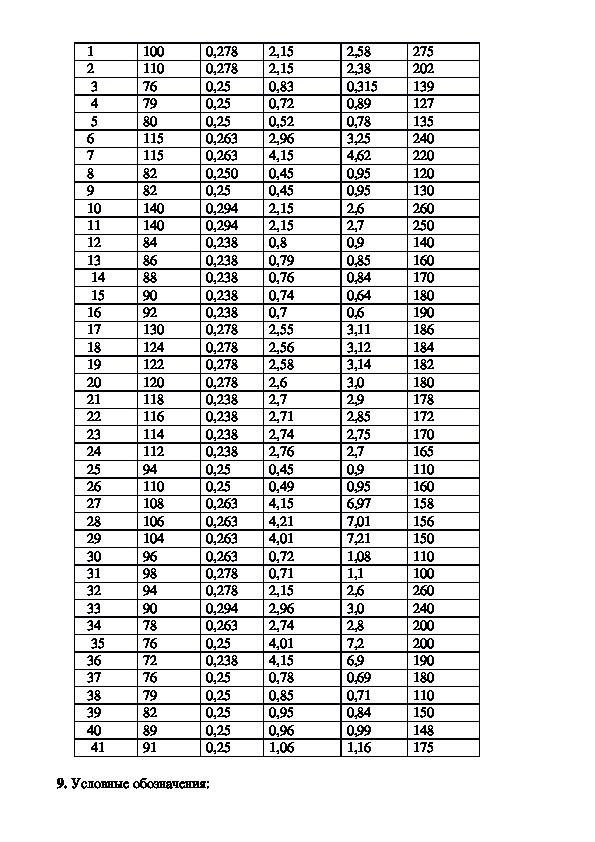
Дополнительные данные для динамического расчета» таблица №3.1.2
№
вариант.
dц
мм
λш
mп
кг
mш
кг
m"
шк
кг/м21
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
100
110
76
79
80
115
115
82
82
140
140
84
86
88
90
92
130
124
122
120
118
116
114
112
94
110
108
106
104
96
98
94
90
78
76
72
76
79
82
89
91
0,278
0,278
0,25
0,25
0,25
0,263
0,263
0,250
0,25
0,294
0,294
0,238
0,238
0,238
0,238
0,238
0,278
0,278
0,278
0,278
0,238
0,238
0,238
0,238
0,25
0,25
0,263
0,263
0,263
0,263
0,278
0,278
0,294
0,263
0,25
0,238
0,25
0,25
0,25
0,25
0,25
2,15
2,15
0,83
0,72
0,52
2,96
4,15
0,45
0,45
2,15
2,15
0,8
0,79
0,76
0,74
0,7
2,55
2,56
2,58
2,6
2,7
2,71
2,74
2,76
0,45
0,49
4,15
4,21
4,01
0,72
0,71
2,15
2,96
2,74
4,01
4,15
0,78
0,85
0,95
0,96
1,06
9. Условные обозначения:
2,58
2,38
0,315
0,89
0,78
3,25
4,62
0,95
0,95
2,6
2,7
0,9
0,85
0,84
0,64
0,6
3,11
3,12
3,14
3,0
2,9
2,85
2,75
2,7
0,9
0,95
6,97
7,01
7,21
1,08
1,1
2,6
3,0
2,8
7,2
6,9
0,69
0,71
0,84
0,99
1,16
275
202
139
127
135
240
220
120
130
260
250
140
160
170
180
190
186
184
182
180
178
172
170
165
110
160
158
156
150
110
100
260
240
200
200
190
180
110
150
148
175dц диаметр цилиндра;(мм);
λш отношение радиуса кривошипа к длине шатуна ;
mп масса поршневого комплекта ;(кг);
mш масса шатуна ;(кг) ;
m"
шк удельная масса неуравновешенной части коленчатого вала ; (кг/м2)
10. Порядок проведения динамического расчёта(часть №1):
10.1 Расчёт сил давления газов, сил инерции первого и второго порядка,
суммарная сила инерции и результирующая сила.
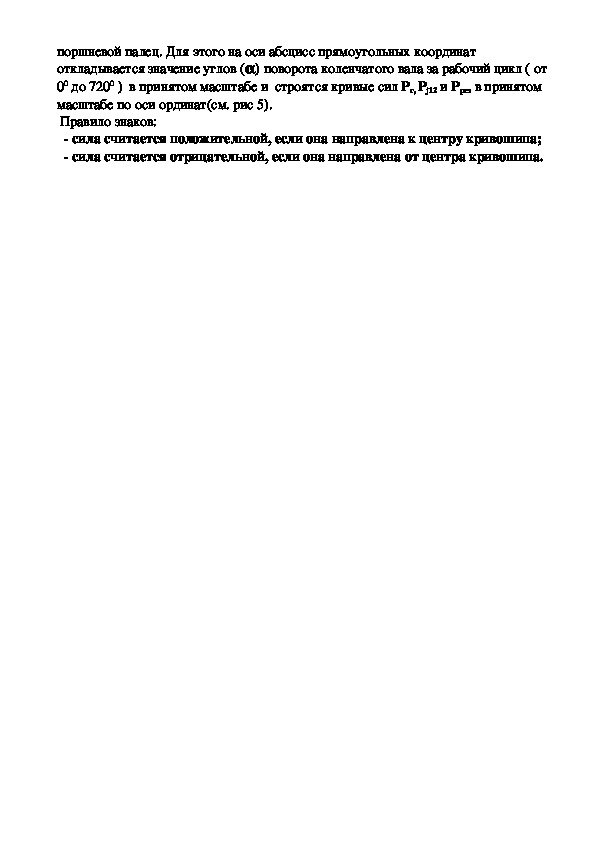
Анализ сил, действующих в кривошипношатунном механизме (КШМ),
необходим для расчёта деталей двигателя на прочность и определения нагрузок на
подшипники. Детали КШМ подвергаются воздействию следующих сил(рис.2):
сила давление газов в цилиндре (Рг); сила инерции возвратнодвижущихся деталей
КШМ (Рј1.2); центробежные силы инерции вращающихся масс (Рс). Силы давления
газов зависят от протекания рабочего процесса в цилиндре двигателя и
определяются по индикаторным диаграммам. Силы инерции зависят то массы
деталей, движущихся с переменными скоростями.
1.Определение сил, действующих вдоль оси цилиндра на поршневой палец. На
поршневой палец действует сила давления газов (Рг) и силы инерции возвратно
движущихся масс ( Рј1.2) кривошипношатунного механизма.
1.1Сила давления газов определяется по формуле:
Рг = (РхР0)*(d2/4)*3.14*106;(н);
Р0 – давление окружающей среды; (мпа).
Рх – текущее давление по индикаторной диаграмме; (мпа).
d(dц) – диаметр цилиндра; (м).
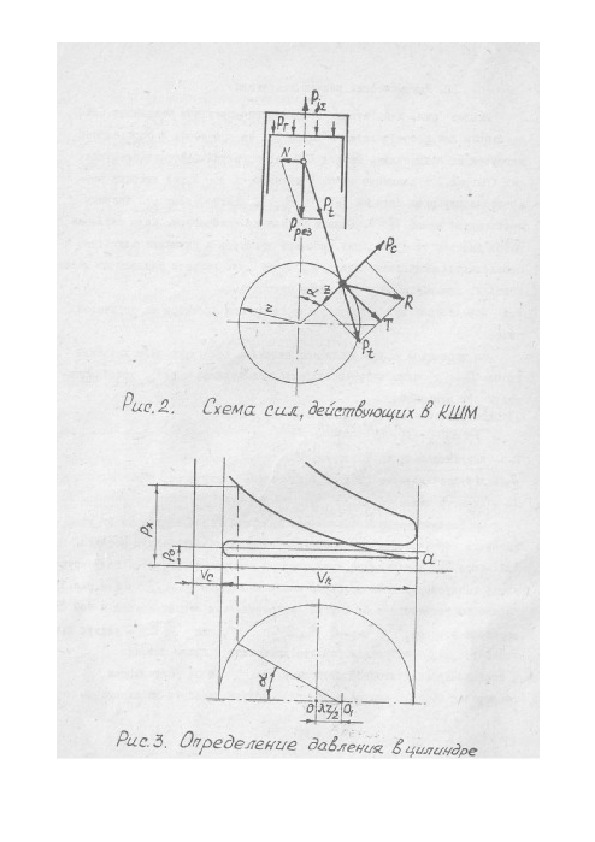
Определение текущего значения давления газов в цилиндре двигателя в функции
от угла поворота коленчатого вала производится графоаналитическим методом.
Для этого под построенной индикаторной диаграммой строится полуокружность
радиусом, равным половине длины диаграммы (lvh/2), (рис3). Вправо по
горизонтали от центра полуокружности в том же масштабе откладывается отрезок
(001), равный величине λш*rкш/2 ,
где rкш – радиус кривошипа;
λш – отношение радиуса кривошипа к длине шатуна. Если длина индикаторной
диаграммы не равна ходу поршня то отрезок [ 001] (поправка Брикса)
следует находить по выражению λш*r/2 ,
где r =lд/2. Из конца этого отрезка (точка 01) проводится ряд лучей под углом
α1,α2,α3……α25,α26 к горизонтали до пересечения с полуокружностью
(рекомендуемый интервал 300 пкв). Проекции концов этих лучей насоответствующие ветви индикаторной указывают, какие точки рабочего процесса
соответствуют тем или иным углам поворота коленчатого вала (пкв), а по
масштабной оси ординат можно определить давление в этих точках. Величины
давлений «Рх» и соответственно «Рг» при различных значениях угла поворота
(αпкв) за период рабочего цикла заносятся в таблицу № 3.1.1.
= 3,14*n
н/30, (с1) .
) + α λш*cos(2 )]α , (н) ;
) ]α и сил инерции второго порядка, действующих
1.2Определение значений величины силы инерции (Рј12) .
Суммарная сила инерции рассчитывается в соответствии углом поворота αпкв по
формуле:
Рј12 = mј*rкш *ω2[ cos(
где mј – масса, совершающая возвратнопоступательное движение рассчитываемая
по формуле mј = mп+0,275*mш , (кг);
mп – масса поршневого коплекта,(кг);
mш – масса шатуна, (кг)э Значение масс (mп,mш) принимают, ориентируясь на
данные двигателей прототипов(табл.№ 3.1.2)
ω – угловая скорость вращения коленчатого вала определяется из выражения
ω
Суммарная сила инерции движущихся возвратнопоступательно масс
рассматривают как алгебраическую сумму сил инерции первого порядка
[Рј1 = mј*rкш*ω2*λш*cos(
одновременно [Рј2 =mј*rкш*λш*ω2*cos(2 )]α , аналитический подсчёт которых ,
весьма кропотливое и ёмкое по времени занятие. В целях экономии времени
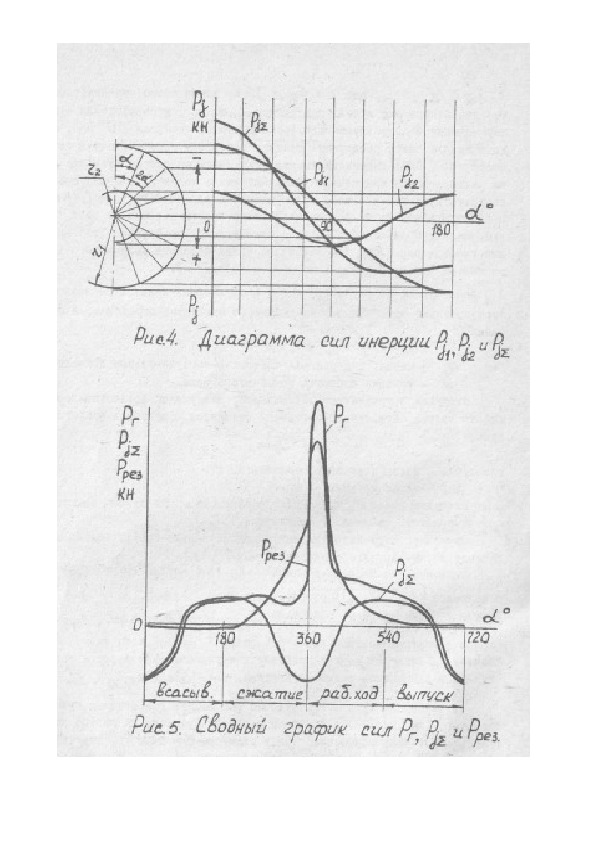
определение значений сил инерции удобнее производить графическим путём. Для
этого в принятом масштабе проводим из общего центра «0» (см. рис 4) две
полуокружности ( одну радиусом r1= m*rкш*ω2 , другую радиусом r2= r1* шλ ) и
ряд лучей под углами (α1,α2,α3…… α6) к вертикали. Вертикальные проекции
отрезков лучей, пересекающих первую окружность, дают в принятом масштабе
значение сил Рј1 при соответствующих углах поворота коленчатого вала , а
проекции отрезков тех же лучей, пересекающих вторую окружность, значения сил
Рј2 при углах поворота коленчатого вала , соответственно вдвое меньших. Через
центр «0» проводим горизонтальную линию и откладываем на ней, как на оси
абсцисс, значения углов поворота (α) коленчатого вала за рабочий цикл(от 00 до
7200). По точкам пересечения указанных выше проекций с ординатами,
проходящими через соответствующие значения углов (α) на оси абсцисс, строим
кривые Рј1 и Рј2 . Путём суммирования ординат кривых Рј1 и Рј2 получаем кривую
результирующей силы инерции Рј12(см.рис 4).
1.3Определив силы Рг и Рј12, находим алгебраическим сложением их
результирующую силу Ррез , действующую на поршневой палец :
Ррез = Рг + Рј12, (н).
Все расчёты по названным выше силам заносятся в сводную таблицу текущих
значений (табл.№3.1.1) и строится сводный график сил, действующих напоршневой палец. Для этого на оси абсцисс прямоугольных координат
откладывается значение углов (α) поворота коленчатого вала за рабочий цикл ( от
00 до 7200 ) в принятом масштабе и строятся кривые сил Рг, Рј12 и Ррез в принятом
масштабе по оси ординат(см. рис 5).
Правило знаков:
сила считается положительной, если она направлена к центру кривошипа;
сила считается отрицательной, если она направлена от центра кривошипа.