Поделиться

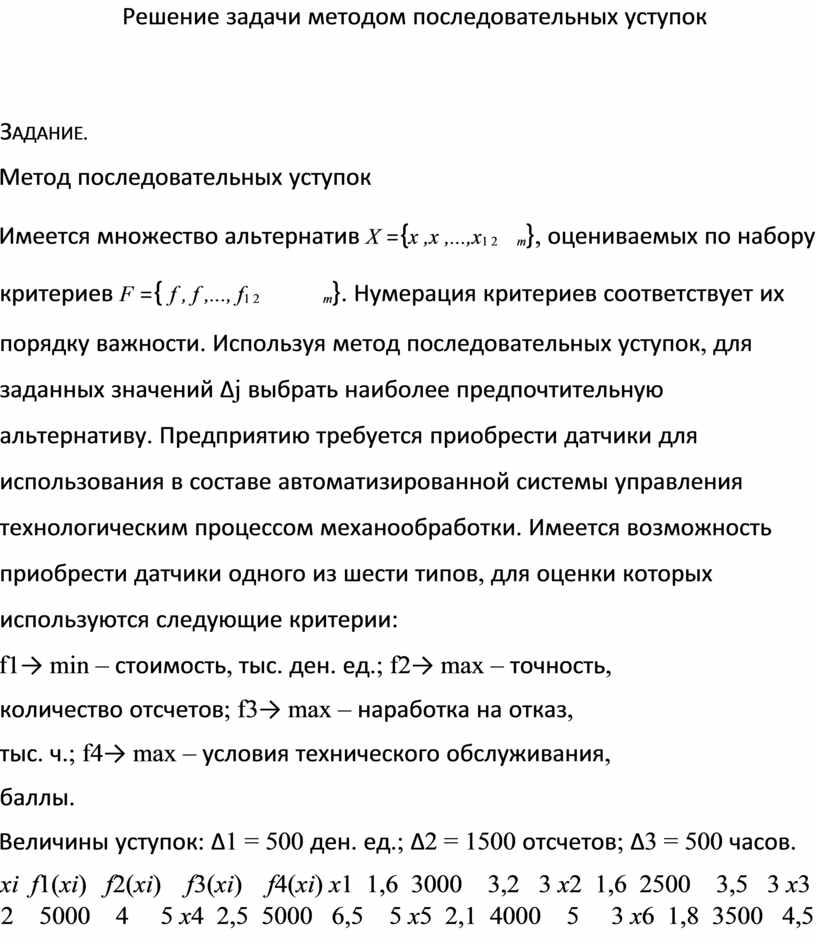
Решение задачи методом последовательных уступок
ЗАДАНИЕ.
Метод последовательных уступок
Имеется множество альтернатив X ={x ,x ,...,x1 2 m}, оцениваемых по набору критериев F ={ f , f ,..., f1 2 m}. Нумерация критериев соответствует их порядку важности. Используя метод последовательных уступок, для заданных значений ∆j выбрать наиболее предпочтительную альтернативу. Предприятию требуется приобрести датчики для использования в составе автоматизированной системы управления технологическим процессом механообработки. Имеется возможность приобрести датчики одного из шести типов, для оценки которых используются следующие критерии:
f1→ min – стоимость, тыс. ден. ед.; f2→ max – точность, количество отсчетов; f3→ max – наработка на отказ, тыс. ч.; f4→ max – условия технического обслуживания, баллы.
Величины уступок: ∆1 = 500 ден. ед.; ∆2 = 1500 отсчетов; ∆3 = 500 часов.
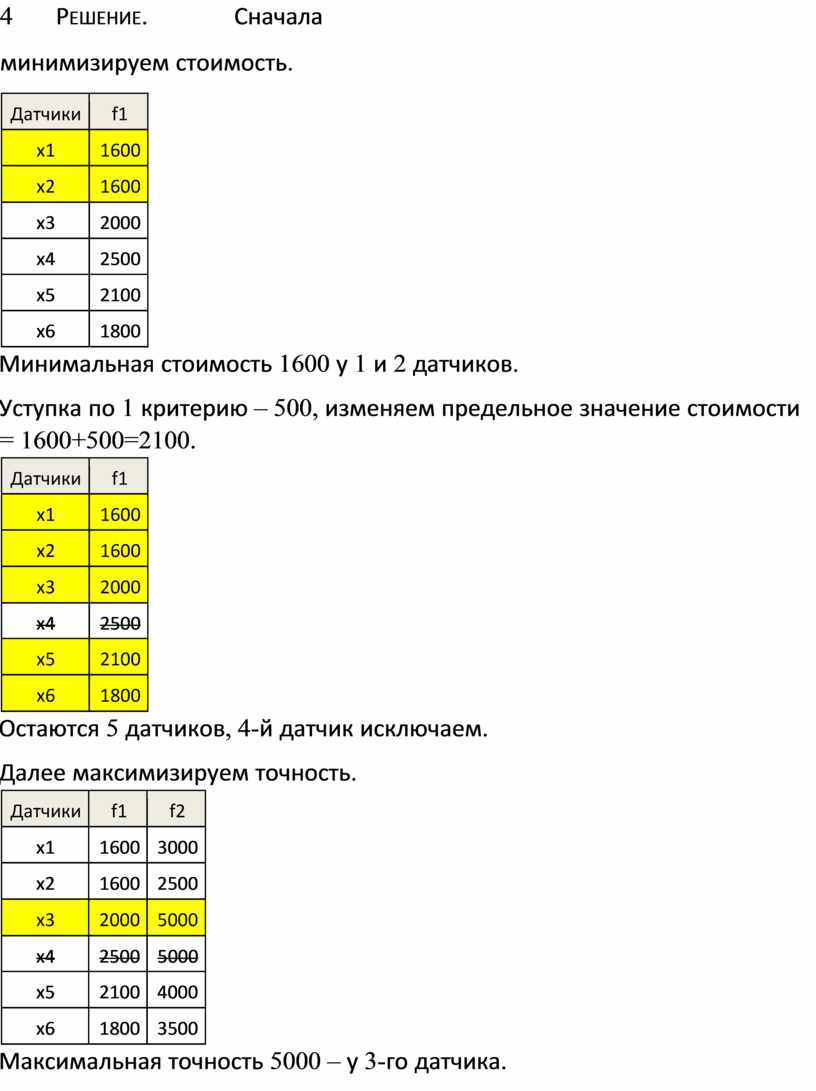
xi f1(xi) f2(xi) f3(xi) f4(xi) x1 1,6 3000 3,2 3 x2 1,6 2500 3,5 3 x3 2 5000 4 5 x4 2,5 5000 6,5 5 x5 2,1 4000 5 3 x6 1,8 3500 4,5 4 РЕШЕНИЕ. Сначала минимизируем стоимость.
|
Датчики |
f1 |
|
x1 |
1600 |
|
x2 |
1600 |
|
x3 |
2000 |
|
x4 |
2500 |
|
x5 |
2100 |
|
x6 |
1800 |
Минимальная стоимость 1600 у 1 и 2 датчиков.
Уступка по 1 критерию – 500, изменяем предельное значение стоимости = 1600+500=2100.
|
Датчики |
f1 |
|
x1 |
1600 |
|
x2 |
1600 |
|
x3 |
2000 |
|
|
|
|
x5 |
2100 |
|
x6 |
1800 |
Остаются 5 датчиков, 4-й датчик исключаем.
Далее максимизируем точность.
|
Датчики |
f1 |
f2 |
|
x1 |
1600 |
3000 |
|
x2 |
1600 |
2500 |
|
x3 |
2000 |
5000 |
|
|
|
|
|
x5 |
2100 |
4000 |
|
x6 |
1800 |
3500 |
Максимальная точность 5000 – у 3-го датчика.
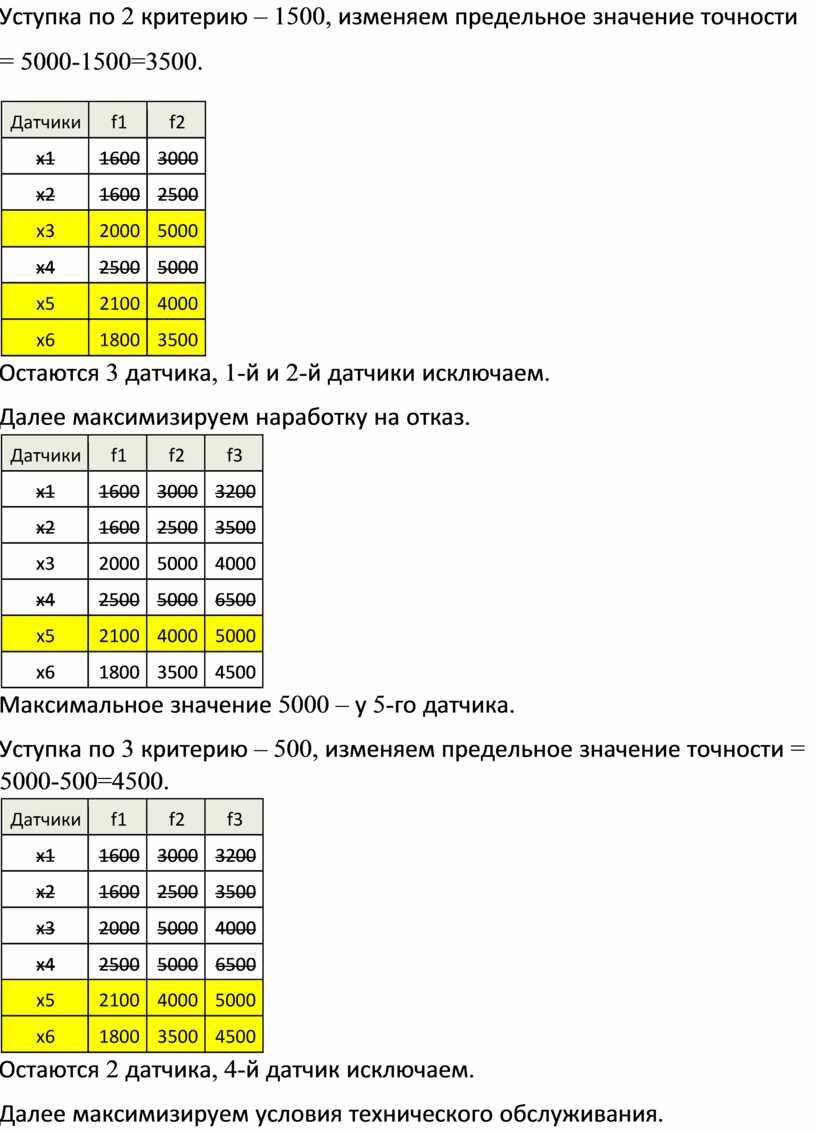
Уступка по 2 критерию – 1500, изменяем предельное значение точности = 5000-1500=3500.
|
Датчики |
f1 |
f2 |
|
|
|
|
|
|
|
|
|
x3 |
2000 |
5000 |
|
|
|
|
|
x5 |
2100 |
4000 |
|
x6 |
1800 |
3500 |
Остаются 3 датчика, 1-й и 2-й датчики исключаем.
Далее максимизируем наработку на отказ.
|
Датчики |
f1 |
f2 |
f3 |
|
|
|
|
|
|
|
|
|
|
|
x3 |
2000 |
5000 |
4000 |
|
|
|
|
|
|
x5 |
2100 |
4000 |
5000 |
|
x6 |
1800 |
3500 |
4500 |
Максимальное значение 5000 – у 5-го датчика.
Уступка по 3 критерию – 500, изменяем предельное значение точности = 5000-500=4500.
|
Датчики |
f1 |
f2 |
f3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x5 |
2100 |
4000 |
5000 |
|
x6 |
1800 |
3500 |
4500 |
Остаются 2 датчика, 4-й датчик исключаем.
Далее максимизируем условия технического обслуживания.
|
Датчики |
f1 |
f2 |
f3 |
f4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
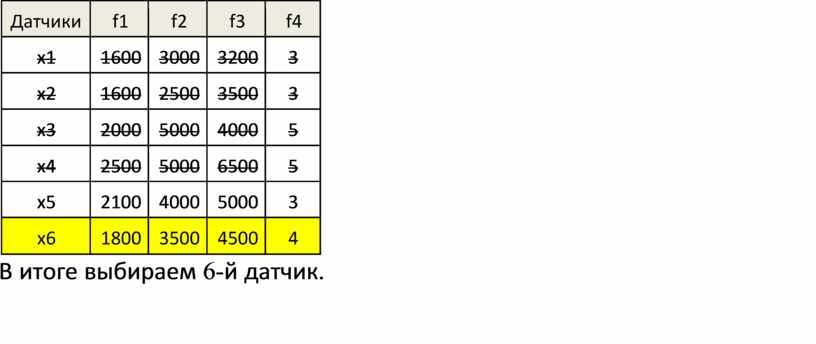
x5 |
2100 |
4000 |
5000 |
3 |
|
x6 |
1800 |
3500 |
4500 |
4 |
В итоге выбираем 6-й датчик.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.