Поделиться

МИНИСТЕРСТВО ОБРАЗОВАНИЯ СТАВРОПОЛЬСКОГО КРАЯ
государственное бюджетное профессиональное образовательное учреждение «Георгиевский техникум механизации, автоматизации и управления» (ГБПОУ ГТМАУ)


СИСТЕМЫ АВТОМАТИЗАЦИИ
СЕЛЬСКОХОЗЯЙСТВЕННЫХ ОРГАНИЗАЦИЙ
КОНСПЕКТЫ ЛЕКЦИЙ
для студентов учебных заведений
среднего профессионального образования по специальности
35.02.08 Электрификация и автоматизация сельского хозяйства
ГЕОРГИЕВСК
2024
Составитель: Прутков Владимир Иванович
Аннотация
Конспекты лекций содержат материалы, необходимые для изучения междисциплинарного курса МДК.01.02 Системы автоматизации сельскохозяйственных организаций профессионального модуля ПМ.01 Монтаж, наладка и эксплуатация электрооборудования (в т. ч. электроосвещения), автоматизация сельскохозяйственных организаций. Данные материалы посвящены изучению принципов автоматического управления технологическими процессами в сельском хозяйстве. Для улучшения качества восприятия материала и получения обучающимися полного представления о внешнем виде, конструктивных особенностях и технологии функционирования автоматизируемых объектов имеются гиперссылки на просмотр учебных фильмов (необходимо наличие интернет-соединения).
Учебное издание предназначено для студентов учебных заведений среднего профессионального образования, обучающихся по специальности 35.02.08 «Электрификация и автоматизация сельского хозяйства».
СОДЕРЖАНИЕ
1. Введение. Задачи и содержание междисциплинарного курса
Тема 2.1 Основы автоматизации сельскохозяйственного производства
2. Общие понятия об автоматизации производственных процессов
3. Объекты автоматизации
4. Виды и типы схем СА. Структурные схемы. Функциональные схемы автоматизации
5. Принципиальные электрические схемы
6. Схемы соединений (монтажные), расположения, подключения
7. Выбор элементов систем автоматизации, щитов и пультов управления
Тема 2.2 Автоматизация технологических процессов в животноводстве
12. Автоматизация безбашенной насосной установки
13. Автоматизация башенной насосной установки на релейно-контактных элементах (РКЭ)
14. Основы регулирования микроклимата в помещениях. Автоматизация вентиляционных установок при помощи станции управления ШАП-5701
15. Автоматизация вентиляционных установок при помощи тиристорной станции управления «Климатика-1»
16. Автоматизация нагревательных установок
17. Системы автоматизации кормораздаточных ПТЛ. СА кормораздатчиков для свинотоварных ферм
18. Автоматизация кормления крупного рогатого скота. Автоматизация поения животных
19. Автоматизация уборки навоза
20. Системы автоматизации доильных установок
21. Системы автоматизации машин первичной обработки молока
Тема 2.3 Автоматизация птицеводства
22. Автоматизация кормления птицы при напольном её содержании
23. Автоматизация кормления птицы при клеточном её содержании. Автоматизация поения птицы
24. Автоматизация микроклимата в птицеводческих помещениях. Автоматизированные инкубаторы
25. Автоматизация управления освещением птичников
26. Автоматизация процесса уборки помёта
27. Автоматизация сбора и обработки яиц
28. Автоматизированные технологические линии убоя и обработки птицы
Тема 2.4 Автоматизация кормопроизводства
29. Автоматизация агрегата для приготовления травяной муки. Функциональная схема системы автоматизации агрегата АВМ-1,5
30. Принципиальная электрическая схема управления агрегатом АВМ-1,5
31. Автоматизация гранулирования и брикетирования кормов. Функциональная схема системы автоматизации агрегата ОПК-2
32. Принципиальная электрическая схема СА оборудования ОПК-2
33. Автоматизация дозирования и смешивания кормов
34. Автоматизация поточно-транспортной линии (ПТЛ) приготовления корнеклубнеплодов
35. Автоматизация кормоцехов
Тема 2.5 Автоматизация технологических процессов в полеводстве
36. Автоматизация насосных станций орошения
37. Объём автоматизации мобильных машин в полеводстве. Автоматизация работы посевных машин и уборочных комбайнов
38. Системы автоматического управления (САУ) положением рабочих органов мобильных сельскохозяйственных агрегатов (МСА). САУ режимами работы МСА
39. Автоматизация зернопунктов
40. Системы автоматизации шахтных зерносушилок
41. Автоматизация очистительных и сортировальных машин. Электрическая схема управления агрегатом ЗАВ-20
42. Автоматизация процесса вентилирования зерна
Тема 2.6 Автоматизация технологических процессов в защищённом грунте
43. Виды и оборудование сооружений защищенного грунта. Автоматизация обогрева парников и теплиц
44. Технологические основы и СА микроклимата в ангарных теплицах. Схема размещения оборудования УТ-12 в теплице
56. Автоматизация полива растений
1. Автоматизация подкормки растений
Тема 2.7 Автоматизация хранилищ сельскохозяйственной продукции
2. Автоматизация овощехранилищ
3. Автоматизация фруктохранилищ
4. Средства автоматизации контроля качества сельскохозяйственной продукции
Тема 2.8 Автоматизация энергоснабжения
5. Автоматизация теплогенераторов
6. Технологическая схема, СА и оборудование котельной установки
7. Система автоматики котельной «Кристалл»
8. Система автоматики котельной «Курс»
9. Автоматизация вспомогательного котельного оборудования
10. Автоматизация электрокотельной
11. Автоматизация безопасности котельных установок. Автоматизация системы сельскохозяйственного газоснабжения
12. Автоматизация холодильных установок
Тема 2.9 Автоматизация установок для электрического облучения и обогрева
13. Автоматизация установок облучения растений. Автоматизация ультрафиолетового облучения
14. Автоматизация установок инфракрасного обогрева
Тема 2.10 Автоматизация ремонта сельскохозяйственной техники
15. Автоматизация процессов диагностики сельскохозяйственной техники, мойки, разборки и сборки агрегатов
16. Автоматизация процессов восстановления деталей
17. Автоматизация обкатки автотракторных двигателей
Тема 2.11 Системы централизованного контроля и автоматизированного управления
18. Принципы централизации управления. Системы централизованного контроля
19. Автоматизированные системы управления технологическим процессом (АСУ ТП)
Список используемых источников
Примечание: для удобства навигации наименования занятий содержат гиперссылки, позволяющие быстро перейти к изучаемым материалам. Для перехода к нужному материалу необходимо навести указатель на его наименование в содержании, затем нажать левую кнопку мыши. Для возврата к листу «Содержание» следует нажать на заголовок занятия.
Цели и задачи МДК.01.02 Системы автоматизации сельскохозяйственных организаций. Целью освоения курса является формирование у обучающихся знаний и умений в области автоматизации сельскохозяйственного производства, умений работать с технической документацией, применять полученные знания при решении производственных задач.
Задачи курса:
– приобретение обучающимися базовых знаний в вопросах автоматизации сельскохозяйственного производства;
– формирование теоретических и практических навыков у обучающихся в решении практических задач, связанных с проектированием систем автоматизации;
– навыков в проведении наладки, регулировок и проверке средств автоматизации.
Место МДК в структуре основной профессиональной образовательной программы (ОПОП). Междисциплинарный курс (МДК) входит в профессиональный цикл и относится к профессиональному модулю ПМ.01 Монтаж, наладка и эксплуатация электрооборудования (в т. ч. электроосвещения), автоматизация сельскохозяйственных организаций.
МДК базируется на входных знаниях, умениях и компетенциях, полученных обучающимися в процессе изучения «Основы электротехники», «Электрические измерения», «Электронная техника», «Электрические машины и аппараты», «Основы автоматики и технические средства автоматизации».
Результаты освоения МДК используются при изучении последующих дисциплин профессионального цикла основной профессиональной образовательной программы, обеспечивающих дальнейшую подготовку в указанной области: «Эксплуатация и ремонт электротехнических изделий», «Техническое обслуживание и ремонт автоматизированных систем сельскохозяйственной техники», «Управление структурным подразделением организации (предприятия)».
Знания, умения и навыки, полученные по программе дисциплины, закрепляются, расширяются и углубляются при прохождении студентами практик, выполнении курсовых проектов и выпускной квалификационной работы и в практической деятельности.
В результате изучения курса студент должен:
знать:
– основные средства и способы механизации производственных процессов в растениеводстве и животноводстве;
– технологические основы автоматизации и систему централизованного контроля и автоматизированного управления технологическими процессами сельскохозяйственного производства; уметь:
– производить монтаж и наладку приборов освещения, сигнализации, контрольно-измерительных приборов, звуковой сигнализации и предохранителей в тракторах, автомобилях и сельскохозяйственной технике;
– производить монтаж и наладку элементов систем централизованного контроля и автоматизированного управления технологическими процессами сельскохозяйственного производства.
Вышеперечисленные умения, знания направлены на формирование у обучающихся следующих профессиональных и общих компетенций:
ПК1.1 Выполнять монтаж электрооборудования и систем автоматического управления.
ОК 1. Понимать сущность и социальную значимость своей будущей профессии, проявлять к ней устойчивый интерес.
ОК 2. Организовывать собственную деятельность, выбирать типовые методы и способы выполнения профессиональных задач, оценивать их эффективность и качество.
ОК 3. Принимать решения в стандартных и нестандартных ситуациях и нести за них ответственность.
ОК 4. Осуществлять поиск и использование информации, необходимой для эффективного выполнения профессиональных задач, профессионального и личностного развития.
ОК 5. Использовать информационно-коммуникационные технологии в профессиональной деятельности.
ОК 6. Работать в коллективе и в команде, эффективно общаться с коллегами, руководством, потребителями.
ОК 7. Брать на себя ответственность за работу членов команды (подчиненных), за результат выполнения заданий.
ОК 8. Самостоятельно определять задачи профессионального и личностного развития, заниматься самообразованием, осознанно планировать повышение квалификации.
ОК 9. Ориентироваться в условиях частой смены технологий в профессиональной деятельности.
Структура и содержание курса.
обязательная учебная нагрузка – 190 ч (в том числе лабораторных работ и практических занятий – 40 ч, курсовое проектирование – 30ч); самостоятельная работа – 95 ч.
Список источников:
Основной источник:
1. Бородин, И. Ф. Автоматизация технологических процессов и системы автоматического управления: учебник для среднего профессионального образования / И. Ф. Бородин, С. А. Андреев. – 2-е изд., испр. и доп. – Москва: Издательство Юрайт, 2023. – 386 с. – (Профессиональное образование). – ISBN 978-5-534-08655-3. – Текст: электронный // Образовательная платформа Юрайт [сайт]. – URL: https://urait.ru/bcode/514330
Дополнительные источники:
2. Герасимович, Л. С. Электрооборудование и автоматизация сельскохозяйственных агрегатов и установок / Л. С. Герасимович. – М.: КолосС, 1980. – 391 с.
3. Кудрявцев, И. Ф. Электрооборудование и автоматизация сельскохозяйственных агрегатов и установок. / Под ред. И. Ф. Кудрявцева. – М.: Агропромиздат, 1988. – 391 с.
Необходимо различать понятия «Автоматика» и «Автоматизация».
Автоматика – это отрасль науки и техники, охватывающая совокупность технических средств и методов, позволяющих осуществлять технологические процессы без непосредственного участия человека. Она включает в себя теорию автоматического регулирования и методы построения автоматических систем, а также совокупность необходимых для этого технических средств.
Автоматизация – это введение (внедрение, применение) приборов, устройств и управляющих машин, осуществляющих без непосредственного участия человека управление технологическим процессом по заданной (или вырабатываемой в соответствии с заданными критериями) программе.
Автоматизация представляет собой комплекс действий и мероприятий технического, организационного, экономического и культурного содержания, в результате которых достигается понижение или полное исключение непосредственного участия человека в осуществлении того или иного производственного процесса или в управлении той или иной машиной и системой машин и обеспечиваются такие высокие результаты работы производства в отношении быстроты, точности, надёжности, постоянства, качества, экономичности и т. д., которых человек своим непосредственным участием обеспечить не может.
Автоматизация в зависимости от степени её внедрения в технологический процесс подразделяется на частичную, комплексную и полную.
Частичная автоматизация – это автоматизация отдельных машин или процессов. При этом автоматизируются лишь основные операции или процессы.
Комплексная автоматизация – это автоматизация, при которой автоматизированы не только основные операции и процессы, но и вспомогательные операции (транспортно-загрузочные, контрольноучётные, сортировочные и т. п.). При этом контроль и управление объектом осуществляется дежурным на диспетчерском пункте.
При отсутствии автоматизации вспомогательных процессов количество технологов и операторов, то есть людей, непосредственно занятых на производстве, значительно меньше, чем вспомогательного персонала. Это приводит к снижению экономического эффекта.
Комплексная автоматизация – это автоматизация всех основных технологических операций, а также контроля и транспортировки вырабатываемой продукции или изделий на протяжении всего технологического процесса с централизованным управлением объектом из одного пункта.
Полная автоматизация предприятия – это автоматизация всех основных и вспомогательных процессов и операций, включая систему управления, которая осуществляется при помощи вычислительных машин или других автоматических устройств.
При полной автоматизации предприятие может работать без постоянного присутствия людей. Управление осуществляется при помощи вычислительных машин. Эти машины, получая непосредственно от измерительных устройств или других приборов исходные данные о состоянии отдельных точек системы, перерабатывают эту информацию, определяют наивыгоднейшие режимы работы и вырабатывают необходимые сигналы управления, то есть выдают команды, управляющие различными исполнительными механизмами, изменяющими ход процесса.
Таким образом, при полной автоматизации производства автоматизируются не только контроль, защита и регулирование, но и все операции, связанные с пуском и остановкой оборудования. В этом случае импульс на пуск, остановку и изменение режима работы даёт не человек, а машина. Полностью автоматизированные производственные звенья и предприятия при всяких нарушениях режима и авариях подают сигнал в места нахождения технологического персонала.
В сельском хозяйстве применяют в основном частичную и комплексную автоматизации.
В эпоху промышленного переворота в Европе (конец XVIII – начало XIX вв.) появился практический интерес к автоматике, связанный с её внедрением в промышленность.
В 1765 году Иван Иванович Ползунов изобрёл автоматический регулятор питания парового котла, а в 1784 году Джеймс Уатт разработал автоматический регулятор скорости паровой машины.
Первыми автоматическими устройствами в электротехнике были регулятор напряжения Э. Х. Ленца и Б. С. Якоби, и дифференциальный регулятор для дуговых ламп В. Н. Чиколева, предложенные в середине XIX в.
Широкое внедрение средств автоматики в производство началось после первой мировой войны и продолжается до настоящего времени.
Этапы развития элементной базы средств автоматики:
Первый этап (и до сих пор) – широкое использование релейно-контактной аппаратуры: реле, магнитных пускателей, распределителей, переключателей, ключей управления и т. д.
Второй этап (50-60-е годы XX в.) – появление полупроводниковых элементов: диодов, транзисторов, тиристоров и т. д. Появление пневматических логических и функциональных элементов. Пневматические элементы дешевле и проще по устройству, взрыво- и пожаробезопасны, так как не имеют электрических цепей, более коррозионностойкие и имеют большую вероятность безотказной работы.
Третий этап (60-е – начало 70-х годов XX в.) – создание узлов автоматики и вычислительной техники на интегральных микросхемах.
Четвёртый этап (80-е годы XX в. – настоящее время) – применение микропроцессорных средств. Внедрение компьютеров в управление производством.
В сельском хозяйстве автоматизация начала развиваться относительно недавно, почти одновременно с электрификацией сельского хозяйства (с 1953 года). Вначале внедрялась частичная автоматизация. Это в основном автоматический контроль и защита от аварийных режимов. При этом количество рабочих мест не сокращается, а лишь облегчается труд. Затем начала внедряться комплексная автоматизация. При этом создаются автоматические поточные линии, сокращается число обслуживающего персонала.
В настоящее время необходимо развивать интенсификацию сельского хозяйства – дополнительно вкладывать капитал в производство, в том числе и в автоматизацию, для увеличения количества полученной продукции при сокращении затрат на её производство.
Техник-электрик решает следующие задачи автоматизации сельскохозяйственного производства:
– составляет различные схемы автоматизации, делает их анализ;
– рассчитывает и выбирает технические средства автоматизации (ТСА);
– производит монтаж и наладку ТСА;
– собирает электрические схемы, выявляет и устраняет причины неполадок в их работе;
– осуществляет техническое обслуживание (ТО) и текущий ремонт (ТР) ТСА;
– по мере возможности производит замену устаревших ТСА (релейно-контактные элементы) на современные аналоги (бесконтактные элементы и др.).
ТЕМА 2.1 ОСНОВЫ АВТОМАТИЗАЦИИ
СЕЛЬСКОХОЗЯЙСТВЕННОГО
В зависимости от выполняемых автоматическими устройствами функций различают следующие основные формы автоматизации: автоматический контроль, автоматическое управление, автоматическая защита и автоматическое регулирование.
Автоматический контроль предназначается для дистанционного наблюдения или записи изменяющихся показателей процесса автоматизируемого объекта. Он подразделяется на несколько основных видов: автоматическая сигнализация, автоматическое измерение, автоматическая обработка данных и автоматическая сортировка.
Автоматическая сигнализация заключается в том, что при ней контролируются предельные (крайние) значения каких-либо физических параметров, характеризующих ход технологического процесса. При отступлении от нормальных (заданных) режимов работы машины автоматический прибор подаёт звуковой или световой сигналы. Звуковой сигнал привлекает внимание, а световой сигнал указывает место нарушения (изменения) технологического параметра.
При автоматическом измерении параметры контролируются измерительными приборами (амперметр, вольтметр, термометр, манометр и др.)
Автоматическое управление – это совокупность воздействий, выработанных на основании полученной информации или программы, направленных на поддержание или улучшение работы объекта в соответствии с заданием.
Автоматическое регулирование – это частный случай автоматического управления, оно направлено на поддержание какого-либо показателя технологического процесса в заданных пределах или изменение его по заданному закону. При этом все функции контроля, сравнения измеренных показателей процесса, определения величины и внесения регулирующего воздействия на процесс осуществляется с помощью автоматических приборов и устройств.
Показатель, характеризующий технологический процесс, величину которого необходимо поддерживать постоянной или изменять по заданному закону, называется регулируемым параметром. Автоматическое устройство, при помощи которого регулируется параметр, называется автоматическим регулятором.
Автоматическая защита. Её устройства либо прекращают контролируемый производственный процесс при возникновении ненормальных режимов (отключение электрических машин и электрических сетей при коротких замыканиях), либо обеспечивают другие меры для ликвидации опасности (например, открытие предохранительного клапана для снижения давления в каком-либо резервуаре или котле, когда это давление превышает заданное значение).
Поскольку действие устройств автоматической защиты так или иначе связано с органами управления, её можно считать разновидностью автоматического управления.
Между защитой и сигнализацией существует тесная связь. Очень часто одни и те же реле и датчики устанавливают для выполнения функций сигнализации и защиты. Например, контролируя температуру какой-либо среды, устройство автоматически может сначала дать сигнал о начавшемся повышении температуры, а когда она превысит допустимый предел, автоматически остановить машину или процесс.
Специальные методы и технические средства автоматики позволяют объединить в один технологический процесс работу большого количества машин и установок, расположенных друг от друга на значительных расстояниях. Такие системы автоматики называют телемеханическими.
Телемеханика – это область науки и техники, охватывающая теорию и технические средства автоматической передачи на расстояние команд управления, а также информации о состоянии объекта.
Телемеханические системы в зависимости от назначения подразделяются на системы телесигнализации, телеизмерения и телеуправления.
Кибернетика (от др.-греч. κυβερνητική «искусство управления») – это наука об общих закономерностях процессов управления и связи в организованных системах, к числу которых относятся машины, живые организмы и их объединения.
Основанием для предположения о существовании общих законов связи, контроля и управления в машинах и организмах послужило наличие некоторого сходства в структуре передачи сигналов по электрическим линиям и нервным путям в организме, то есть наличие качественной аналогии между работой машин и деятельностью живого организма. Поэтому кибернетику можно определить и как учение о способах восприятия, передачи, хранения, переработки и использования информации в машинах, живых организмах и их объединениях.
Кибернетика изучает то общее, что свойственно всем процессам управления независимо от их физической природы и ставит своей задачей создание единой теории этих процессов.
Экономическая эффективность автоматизации измеряется степенью уменьшения совокупного труда, затрачиваемого на производство единицы продукции. При автоматизации сельскохозяйственных производственных процессов стоимость капитальных затрат обычно несколько возрастает, а эксплуатационные расходы на единицу продукции существенно сокращаются. Таким образом, эффективность автоматизации характеризуется суммарным сокращением затрат на производство единицы продукции.
Если автоматизацию какого-либо процесса можно осуществить различными вариантами, то надо выбрать самый эффективный вариант, который обеспечивает более интенсивное снижение стоимости и более высокий рост производительности общественного труда. При этом очень важно за базовый вариант принять наиболее передовой и совершенный – вариант механизированного производства, применяемый или планируемый к внедрению в перспективе в отечественной или зарубежной практике. При сравнении с менее совершенным способом производства можно получить в расчетах завышенную экономию средств. Фактически этот же уровень может быть достигнут за счёт более прогрессивной технологии машинного способа производства без привлечения автоматизации. По каждому выбранному варианту определяют затраты и экономический эффект. Лучшим признают вариант, у которого экономический эффект максимальный.
На технико-экономические показатели существенно влияют правильно сформулированные технические требования на автоматизацию технологического процесса (ТП). Например, повышенные требования к точности работы автоматической системы приводят к усложнению устройств автоматики и существенному увеличению капитальных и эксплуатационных затрат.
Экономическая эффективность автоматизации складывается из энергетического, трудового, структурного и технологического эффектов.
Энергетический эффект определяют по сокращению расхода топлива или энергии, увеличению надежности и долговечности работы энергетического оборудования, экономичности работы систем энергообеспечения, повышению КПД силовых установок и т. д.
Трудовой эффект связан с сокращением прямых затрат живого труда обслуживающего персонала на выполнение ТП сельскохозяйственного производства. При переходе на автоматизацию затраты живого труда существенно сокращаются при незначительном увеличении капитальных затрат на аппаратуру автоматики.
Структурный эффект обусловлен сокращением регулирующих и запасных емкостей, уменьшением служебных помещений и инженерных коммуникаций, снижением металлоемкости и стоимости оборудования, увеличением съема продукции с единицы площади или объема производственных зданий, повышением концентрации построек на территории.
Технологический эффект обусловлен в основном увеличением производства сельскохозяйственной продукции за счёт автоматизации ТП, например, в животноводстве, птицеводстве, защищённом грунте – это создание благоприятных климатических условий путем автоматического управления микроклиматом в зависимости от времени суток, сезона, возраста животных, вида растений, а также связанное с автоматизацией сокращение расхода корма и повышение качества продукции.
В результате технико-экономических, социально-экономических и качественных сравнений автоматизированного и неавтоматизированного способов производства определяют основные показатели эффективности автоматизации: капитальные затраты, эксплуатационные годовые издержки, рентабельность, срок окупаемости, приведенные затраты и др.
Суммарные приведённые затраты:
З = ЕН∙К + И, (1)
где ЕН – коэффициент эффективности капитальных вложений, 1/год;
К – капитальные вложения, руб.;
И – годовые издержки производства (себестоимость продукции), руб.
Годовые эксплуатационные издержки производства:
И = ИР + ИКР + ИМ + ИЭ, (2)
где ИР – амортизационные отчисления на реновацию;
ИКР – амортизационные отчисления на капитальный ремонт;
ИМ – затраты на материалы и энергию, необходимые для осуществления технологических процессов; ИЭ – расходы на эксплуатацию, включающие в себя заработную плату, общепроизводственные расходы и расходы на текущий ремонт.
Нормативный срок окупаемости капитальных затрат:
1
T = ![]() . (3)
. (3)
EН
Фактический срок окупаемости капитальных затрат на автоматизацию:
К КА − Н
T= ![]() , (4)
, (4)
(Ц СА − А)VА −(Ц СН − Н)VН
где КА и КН – соответственно первоначальные капиталовложения автоматизированного и неавтоматизированного производства;
ЦА, ЦН и СА, СН – соответственно цены и себестоимости единиц продукции;
VА и VН – объёмы производства автоматизированного и неавтоматизированного производства, единиц продукции/год.
Срок окупаемости капитальных затрат можно также определить по следующей формуле:
К КА − Н
T= ![]() , (5)
, (5)
Э ЭН − А
где ЭН и ЭА – эксплуатационные расходы соответственно неавтоматизированного и автоматизированного производства.
Экономическая эффективность применения автоматизации:
ЭЭФ = ЗН – ЗА, (6)
где ЗН и ЗА – суммарные приведённые затраты соответственно неавтоматизированного и автоматизированного производства.
К особенностям сельскохозяйственного производства, которые нельзя не учитывать при его автоматизации, относятся:
– неразрывная связь сельскохозяйственной техники с биологическими объектами;
– многообразие технологических процессов, в которых замена живой тягловой силы на машинный способ производства не завершена;
– большое разнообразие сельскохозяйственных машин и установок, имеющих различные характеристики и режимы работы;
– рассредоточенность сельскохозяйственных установок и удалённость ремонтной базы от объектов автоматизации;
– невысокий уровень квалификации обслуживающего персонала;
– относительно малая мощность сельскохозяйственных установок, небольшое число часов использования в течение суток и сезонность работы;
– широкие пределы изменения влажности и температуры окружающей среды (работы на открытом воздухе), сильные вибрации (мобильные процессы), наличие лёгких и тяжёлых примесей (пыль, мякина, песок в полеводстве) и агрессивных газов (аммиак, сероводород в животноводческих помещениях).
Технической базой для автоматизации являются: технологическая система, технологическая схема поточных линий.
Технические объекты: электрические двигатели и генераторы, установки микроклимата, инкубаторы, осветительные и облучающие установки, кормоприготовительные машины, транспортёры и другие – это всё объекты автоматизации (управляемые объекты).
Классификация процессов автоматизации Животноводство и птицеводство:
– водоснабжение;
– приготовление и раздача корма;
– удаление навоза и помёта;
– обогрев и вентиляция;
– электрическое освещение и облучение;
– доение и первичная обработка молока;
– сбор и обработка яиц;
– убой животных и птицы.
Растениеводство:
– обогрев парников и теплиц, облучение растений;
– полив и подкормка растений;
– уборка, хранение и обработка урожая.
Станции технического обслуживания сельскохозяйственной техники:
– мойка, разборка и сборка агрегатов;
– восстановление деталей;
– обкатка автотракторных двигателей.
Энергоснабжение:
– обогрев воздуха в помещениях;
– нагрев воды;
– получение пара;
– получение искусственного холода.
Всякий производственный процесс состоит из технологических процессов, в результате которых получается продукт или материал, близкий к его конечному состоянию.
В свою очередь, технологические процессы состоят из ряда простейших технологических операций. Например, процесс производства зерна состоит из ряда взаимосвязанных технологических процессов: обработки почвы, внесения удобрений, посева, ухода за растениями, уборки, обработки и хранения зерна. Технологический процесс обработки зерна состоит из технологических операций транспортирования, взвешивания, очистки и сушки зерна.
Технологические процессы могут протекать во времени последовательно – друг за другом или параллельно – одновременно. Некоторые производственные или технологические процессы в сельском хозяйстве обладают свойством поточности и цикличности. Поточность и цикличность процессов характеризуется движением обрабатываемого материала в определённом ритме и периодичностью получения готового продукта. Движение обрабатываемого продукта может быть непрерывным и прерывистым.
Примерами непрерывного поточного процесса являются, например, процесс приготовления кормов на комбикормовом заводе, процессы обработки зерна на автоматизированных зерноочистительных комплексах. Примером циклического процесса может служить производство мясных цыплят-бройлеров на птицефабриках, производящих высококачественное диетическое мясо молодых цыплят ритмично, независимо от времени года.
Технические требования к автоматизации: – надёжность в работе;
– соответствие технологическому процессу;
– простота схемы;
– удобство в наладке, эксплуатации и ремонте;
– быстродействие;
– безопасность в обслуживании.
Технологические установки выполняют технологические операции, входящие в тот или иной технологический процесс. Эти установки являются объектами автоматизации, то есть они снабжены техническими средствами автоматики с целью ограничения или исключения участия человека в управлении этими установками. Пример: технологическая операция сушки зерна осуществляется с помощью технологической установки, представляющей собой сушильный агрегат, снабжённый датчиками влажности, воздействующими на аппаратуру управления подачей тёплого воздуха.
Система технологических установок, выполняющих технологический процесс, является объектом управления, то есть на основании полученной информации от технологических установок или на основании заданной программы осуществляется воздействие на эти технологические установки с целью поддержания или улучшения работы всего объекта в соответствии с заданием.
Структурная схема системы автоматического управления технологическими установками приведена на рисунке 1.
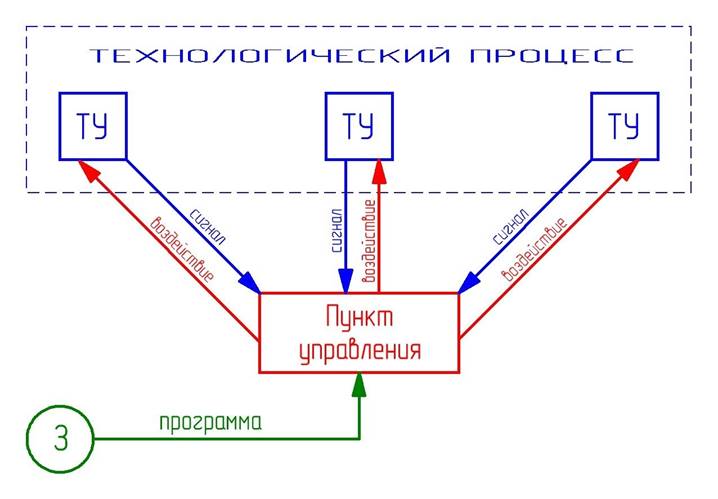
ТУ – технологические установки; З – задатчик режимов работы
Рисунок 1 – Структурная схема системы автоматического управления технологическими установками УРОК №4. ВИДЫ И ТИПЫ СХЕМ СА. СТРУКТУРНЫЕ СХЕМЫ. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ АВТОМАТИЗАЦИИ
В проектах автоматизации технологических процессов (АТП) применяется следующая классификация схем:
1. По видам:
– электрические, – гидравлические, – пневматические, – комбинированные.
2. По типам:
– структурные (Э1), – подключения (Э5),
– функциональные (Э2), – общие (Э6), – принципиальные (Э3), – расположения (Э7), – соединений (монтажные) (Э4), – совмещённые (Э0).
Структурные схемы определяют основные функциональные части системы управления, их назначение и взаимосвязь, в том числе определяют системы контроля и управления технологическими процессами данного объекта. Они устанавливают взаимные связи между щитами автоматизации и пунктами управления (агрегатными, групповыми, центральными и т. п.), а также показывают техническую сущность автоматического управления объектом.
При изучении автоматизации объектов удобно пользоваться обобщённой структурной схемой (рисунок 1).
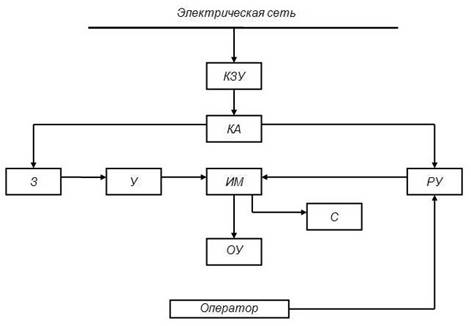
Рисунок 1 – Обобщённая структурная схема САУ
Коммутационное устройство КЗУ служит для подключения автоматической системы к электрической сети и для прекращения работы при возникновении аварийных режимов. Командоаппарат КА задает режим работы. При автоматическом режиме задатчик 3 подаёт через усилитель У команду исполнительному механизму ИМ на ввод объекта управления ОУ в работу или вывод из нее. При ручном управлении воздействие на исполнительный механизм осуществляется аппаратами ручного управления РУ. Исполнительный механизм подает команды также на устройства сигнализации С. Оператор либо программирует системы, либо оказывает воздействие на аппараты ручного управления.
Функциональные схемы являются техническим документом, разъясняющим определённые процессы, протекающие в системе, определяющим структуру и уровень автоматизации технологических процессов (оснащение приборами и средствами автоматизации, организация пунктов контроля, защиты и управления и т. д.).
На функциональной схеме могут быть изображены автоматическая система в целом, управляющие устройства системы или отдельные функциональные блоки.
Функциональные схемы автоматизации связаны непосредственно с технологией производства и технологическим оборудованием и, как правило, показываются на схеме размещения технологического оборудования (технологической схеме).
Технологическое оборудование на функциональных схемах должно соответствовать своей действительной конфигурации, но изображаться упрощённо (без соблюдения масштаба, без изображения второстепенных конструктивных деталей и других подробностей). Изображение технологического оборудования и трубопроводов должно показывать их взаимное расположение, взаимосвязи между ними и взаимодействие с приборами и средствами автоматизации. Условные графические обозначения приборов и средств автоматизации приведены в таблице 1, буквенные обозначения – в таблицах 2 и 3.
Таблица 1 – Условные графические обозначения приборов и средств автоматизации в схемах АТП
|
Обозначение |
Наименование |
|
|
Первичный измерительный преобразователь (датчик) или прибор, устанавливаемый вне щита (по месту) |
|
|
Прибор, устанавливаемый на щите, пульте |
|
|
Допускаемые обозначения |
|
|
Исполнительный механизм. Общее обозначение |
|
|
Исполнительный механизм, который при прекращении подачи энергии или управляющего сигнала: 1 – открывает регулирующий орган; 2 – закрывает регулирующий орган; 3 – оставляет регулирующий орган в неизменном положении. |
|
|
Исполнительный механизм с дополнительным ручным приводом |
|
|
Регулирующий орган |
|
|
Пересечение линий связи без соединения друг с другом |
|
|
Пересечение линий связи с соединением между собой |
Таблица 2 – Буквенные обозначения на функциональных схемах автоматизации
|
Обозначение |
Измеряемая величина |
Функции, выполняемые прибором |
|||
|
Основное значение первой буквы |
Дополнительное значение, уточняющее значение первой буквы |
Отображение информации |
Формирова- ние выходного сигнала |
Дополнительное значение |
|
|
A |
− |
− |
Сигнализация |
− |
− |
|
B |
Освещённость |
− |
− |
− |
− |
|
C |
− |
− |
− |
Регулирование, управление |
− |
|
D |
Плотность |
|
− |
− |
− |
|
E |
Любая электрическая величина |
− |
− |
− |
− |
|
F |
Расход |
Соотношение, доля, дробь |
− |
− |
− |
|
G |
Размер, положение, перемещение |
− |
− |
− |
− |
|
H |
Ручное воздействие |
− |
− |
− |
Верхний предел измеряемой величины |
|
I |
− |
− |
Показание |
− |
− |
|
J |
− |
Автоматическое переключение, обегание |
− |
− |
− |
|
K |
Время, временная программа |
− |
− |
− |
− |
|
L |
Уровень |
− |
− |
− |
Нижний предел измеряемой величины |
|
M |
Влажность |
− |
− |
− |
− |
|
N |
− |
− |
− |
− |
− |
|
O |
− |
− |
− |
− |
− |
|
P |
Давление, вакуум |
− |
− |
− |
− |
|
Q |
Величина, характеризующая качество (состав, концентрацию и т. п.) |
Интегрирование, суммирование по времени |
− |
− |
− |
|
R |
Радиоактивность |
− |
Регистрация |
− |
− |
|
S |
Скорость, частота |
− |
− |
Включение, отключение, переключение |
− |
|
T |
Температура |
− |
− |
− |
− |
|
U |
Несколько разнородных измеряемых величин |
− |
− |
− |
− |
|
V |
Вязкость |
− |
− |
− |
− |
|
W |
Масса |
− |
− |
− |
− |
|
X |
Нерекомендуемая резервная буква |
− |
− |
− |
− |
|
Y |
− |
− |
− |
− |
− |
|
Z |
− |
− |
− |
− |
− |
Таблица 3 – Дополнительные буквенные обозначения, отражающие функциональные признаки приборов
|
Наименование |
Обозначение |
Назначение |
|
Чувствительный элемент |
E |
Устройства, выполняющие первичное преобразование: преобразователи термоэлектрические, термопреобразователи сопротивления, датчики влажности и т. п. |
|
Дистанционная передача |
T |
Приборы бесшкальные с дистанционной передачей сигнала: манометры, дифманометры, манометрические термометры |
|
Станция управления |
K |
Приборы, имеющие переключатель для выбора вида управления и устройство для дистанционного управления |
|
Преобразование, вычислительные функции |
Y |
Для остроения обозначений преобразователей сигналов и вычислительных устройств |
Условные графические обозначения трубопроводов для жидкостей и газов приведены в таблице 4.
Таблица 4 – Условные графические обозначения трубопроводов для жидкостей и газов
|
Вода |
—1—1— |
Ксенон |
—10—10— |
Метан |
—19—19— |
|
Пар |
—2—2— |
Аммиак |
—11—11— |
Этан |
—20—20— |
|
Воздух |
—3—3— |
Кислота |
—12—12— |
Этилен |
—21—21— |
|
Азот |
—4—4— |
Щелочь |
—13—13— |
Пропан |
—22—22— |
|
Кислород |
—5—5— |
Масло |
—14—14— |
Пропилен |
—23—23— |
|
Аргон |
—6—6— |
Жидкое горючее |
—15—15— |
Бутан |
—24—24— |
|
Неон |
—7—7— |
Водород |
—16—16— |
Бутилен |
—25—25— |
|
Гелий |
—8—8— |
Ацетилен |
—17—17— |
Противопожарный трубопровод |
—26—26— |
|
Криптон |
—9—9— |
Фреон |
—18—18— |
Вакуум |
—27—27— |
Принцип построения условного обозначения прибора на функциональных схемах показан на ри-
сунке 2.
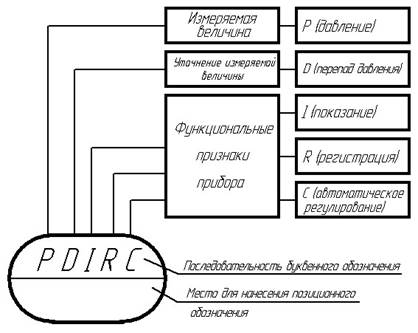
Рисунок 2 – Принцип построения условного обозначения прибора на функциональных схемах Надписи, расшифровывающие конкретную измеряемую величину, располагаются либо рядом с прибором, либо в виде таблицы на поле чертежа (рисунок 3).

Рисунок 3 – Надписи, расшифровывающие конкретную измеряемую величину
Порядок расположения функциональных признаков, если их в одном приборе несколько, должен быть следующим:
IRCSA
Условные обозначения аппаратуры управления электроприёмниками приведены в таблице 4.
Таблица 4 – Условные обозначения аппаратуры управления электроприёмниками
|
Обозначение |
Наименование |
|
|
Пусковая аппаратура для управления электродвигателем (включение, выключение насоса; открытие, закрытие задвижки и т. д.). Например: магнитный пускатель, контактор, тиристорный пускатель и т. д. |
|
|
Аппаратура, предназначенная для ручного дистанционного управления (включение, выключение электродвигателя; открытие, закрытие запорного органа, изменение задания регулятору), установленная на щите. Например: кнопка, ключ управления, задатчик. |
Принципиальная электрическая схема – графическое изображение (модель), служащее для передачи с помощью условных графических и буквенно-цифровых обозначений (пиктограмм) связей между элементами электрического устройства.
Основным назначением принципиальных схем является отражение с достаточной полнотой и наглядностью взаимной связи отдельных приборов, средств автоматизации (СА) и вспомогательной аппаратуры, входящих в состав функциональных узлов систем автоматизации, с учётом последовательности их работы и принципа действия. Эти схемы служат для изучения принципа действия системы автоматизации, они необходимы при проведении наладочных работ в эксплуатации и при ремонте.
Принципиальные схемы являются основанием для разработки других документов проекта: монтажных схем и таблиц щитов и пультов, схем соединений внешних проводок, схем подключения и др.
Принципиальные схемы составляют на основании схем автоматизации, исходя из заданных алгоритмов функционирования объектов отдельных узлов контроля, сигнализации, автоматического регулирования, управления и общих технических требований, предъявляемых к автоматизированному объекту.
На принципиальных схемах изображают в условном виде приборы, аппараты и линии связи между отдельными элементами, блоками и модулями этих устройств.
В общем случае принципиальные схемы содержат:
− условные обозначения принципа действия того или иного функционального узла или элемента системы автоматизации;
− поясняющие надписи;
− части отдельных элементов (приборов, СА, электрических аппаратов) данной схемы, используемые в других схемах, а также элементы и устройства из других схем;
− диаграммы переключений контактов многопозиционных устройств;
− перечень используемых в данной схеме приборов, СА, аппаратуры;
− перечень чертежей, относящийся данной схеме, общие пояснения и примечания.
На принципиальной схеме допускается изображать соединительные и монтажные элементы, устанавливаемые в изделии по конструктивным соображениям. Схемы выполняют для изделий, находящихся в отключенном положении.
Для чтения принципиальных схем необходимо знать алгоритм функционирования схемы, понимать принцип действия приборов, аппаратов и СА, на базе которых построена принципиальная схема.
Порядок чтения принципиальных схем:
1. Ознакамливаются со схемой и перечнем элементов, находят на схеме каждый из них, читают все примечания и пояснения;
2. Определяют систему электропитания электродвигателей, обмоток магнитных пускателей, реле, электромагнитов, комплектных приборов, регуляторов и т. п.
3. Изучают все возможные цепи питания каждого электроприёмника;
4. Проводят табличный анализ (назначение каждого элемента).
Пример анализа принципиальной электрической схеме показан в таблице 1.
Таблица 1 – Анализ принципиальной электрической схемы
|
Позиционное обозначение |
Наименование элемента |
Назначение элемента |
|
QF |
Автоматический выключатель |
Защита от аварийных режимов. |
|
KM |
Электромагнитный пускатель |
Дистанционное управление электродвигателем. |
|
KK |
Тепловое реле |
Защита электродвигателя от токов перегрузок. |
|
SB.1…2 |
Кнопка управления |
Запуск и отключение электродвигателя в ручном режиме. |
|
HL, R |
Сигнальная лампа с балластом |
Световая сигнализация работы электродвигателя. |
Совмещённый. Все части каждого прибора, СА и электрического аппарата располагают в непосредственной близости и заключают обычно в прямоугольный, квадратный или круглый контур, выполненный сплошной тонкой линией.
Принципиальная электрическая схема нереверсивного управления электродвигателем, выполненная совмещённым способом, изображена на рисунке 1.
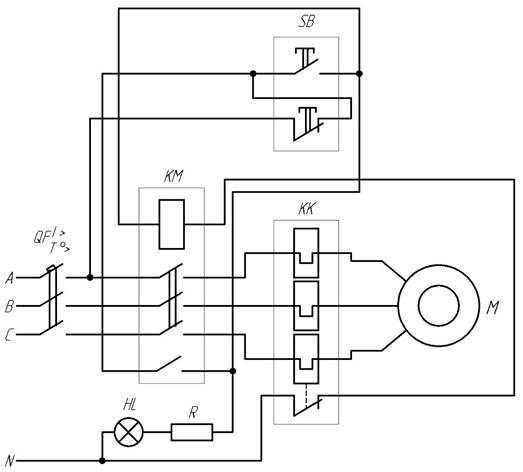
Рисунок 1 – Принципиальная электрическая схема нереверсивного управления электродвигателем, выполненная совмещённым способом
Разнесённый. При этом способе все части каждого прибора, СА и аппарата располагают в разных частях схемы. При этом отчётливо видны электрические цепи, что значительно облегчает чтение схем.
Принципиальная электрическая схема нереверсивного управления электродвигателем, выполненная разнесённым способом, изображена на рисунке 2
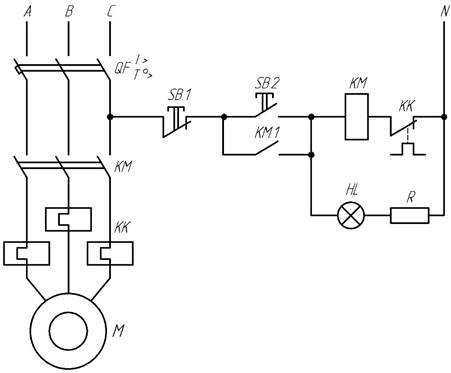
Рисунок 2 – Принципиальная электрическая схема нереверсивного управления электродвигателем,
выполненная разнесённым способом
Работа схемы
Включается автоматический выключатель QF и подаётся питание в главную цепь и цепь управления. Нажимается кнопка SB.2. Катушка магнитного пускателя KМ получает питание по цепи: фаза С – кнопка SB.1 – кнопка SB.2 – катушка магнитного пускателя KМ контакт теплового реле KK – нулевой провод. Магнитный пускатель срабатывает и своими главными контактами подключает электродвигатель М к питающей цепи, а при помощи блок-контакта KМ.1 становится на самопитание (это необходимо для того, чтобы при отпускании кнопки SB.2 катушка магнитного пускателя КМ продолжала получать питание). Электродвигатель M вступает в работу. Загорается сигнальная лампа HL1. При перегрузке срабатывает нагревательный элемент теплового реле KK, контакт этого реле разрывает цепь питания катушки KМ, электродвигатель М отключается. При нажатии кнопки SB.1 цепь питания катушки магнитного пускателя KM разрывается, его контакты возвращаются в исходное положение, электродвигатель M останавливается.
Схемы соединений (монтажные схемы) (Э4) – это схемы, на которых изображают соединения составных частей автоматизированной установки или изделия, а также показывают провода, кабели, жгуты или трубопроводы, которыми осуществляются эти соединения.
Схемами соединений (монтажными) пользуются при выполнении монтажных и наладочных работ на объекте, а также в процессе эксплуатации. Они необходимы и при разработке других проектных и конструкторских документов, в первую очередь чертежей, определяющих прокладку и способы крепления проводов, жгутов, кабелей или трубопроводов.
Применяют три основных способа составления электрических схем соединения: графический, адресный и табличный.
Графический способ заключается в том, что на схеме соединений условными линиями показывают всю соединительную проводку как одиночную, так и объединяемую в пакеты и жгуты. Маркировка на схеме соединения должна соответствовать маркировке на принципиальной электрической схеме, на основании которой разрабатывают схему соединений. Графический способ составления схем соединений применяют для щитов и пультов управления с простой коммутацией, относительно мало насыщенных аппаратурой и приборами.
Схемы трубных проводок выполняют только графическим способом. Если на одном щите или пульте прокладывают трубы из разного материала (стальные, медные, пластмассовые), то и условные обозначения применяют различные (сплошные линии, штриховые, штриховые с двумя точками и т. д.).
Принципиальная электрическая схема, по которой составляется схема соединений графическим способом, изображена на рисунке 1.
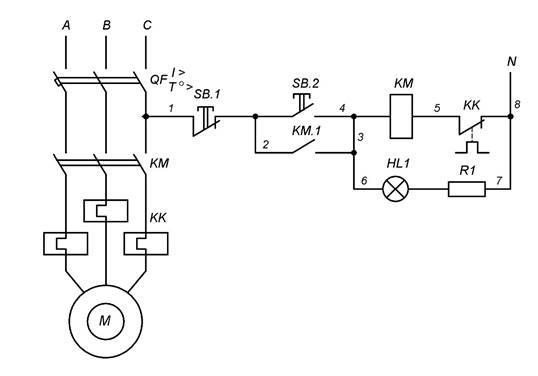
Рисунок 1 – Исходные данные (принципиальная электрическая схема) для графического способа изображения схем соединений
Схема соединений, составленная графическим способом, изображена на рисунке 2.
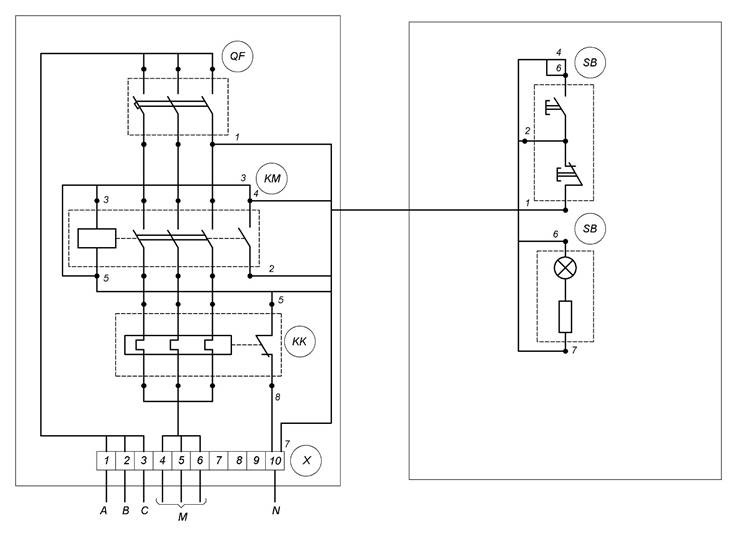
Рисунок 2 – Схема соединений, составленная графическим способом
Адресный способ изображения схем соединений, который иногда называют еще «встречным», состоит в том, что линии связи между отдельными элементами и аппаратами, установленными на щите или пульте, не изображают. Вместо этого у места присоединения провода на каждом аппарате или элементе проставляют цифровой или буквенно-цифровой адрес того аппарата или элемента, с которым он должен быть электрически связан. Такое начертание схемы не загромождает чертеж линиями связи и легко читается.
При составлении схемы соединений адресным способом на чертеже необходимо соблюдать взаимное расположение элементов, приборов и аппаратов, принятое на чертеже общего вида этих конструкций. При наличии приборов и аппаратов на нескольких элементах конструкции (крышке, дверях, боковых стенках) выполняется развертка этих элементов в одну плоскость с соблюдением их взаимного расположения, пропорции и изображения установленных на них приборов и аппаратов.
В настоящее время адресный способ выполнения схем соединений является основным и наиболее распространенным.
Принципиальная электрическая схема, по которой составляется схема соединений графическим способом, изображена на рисунке 3.
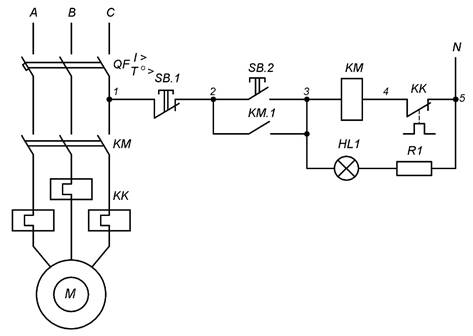
Рисунок 3 – Исходные данные (принципиальная электрическая схема) для адресного способа
изображения схем соединений
Схема соединений, составленная адресным способом, изображена на рисунке 4.
Рисунок 4 – Схема соединений, составленная адресным способом
Табличный способ характеризуется тем, что вместо схем соединений составляют монтажную таблицу, в нее по определенной форме записывают номера каждой электрической цепи и последовательно перечисляют условные буквенно-цифровые обозначения всех приборов, аппаратов и их контактов, к которым эти цепи присоединяются. Маркировка всех цепей, приборов, аппаратов и их контактов должна полностью соответствовать обозначениям, присвоенным им на принципиальных электрических схемах.
На схеме расположения (Э7) изображают составные части изделия, а при необходимости связи между ними – конструкцию, помещение или местность, на которых эти составные части будут расположены.
Составные части изделия изображают в виде упрощённых внешних очертаний или условных графических обозначений. Провода, группы проводов, жгуты и кабели (многожильные провода, электрические шнуры) изображают в виде отдельных линий или упрощенных внешних очертаний. Расположение графических обозначений составных частей изделия на схеме должно примерно соответствовать действительному размещению в конструкции, помещении, на местности. При выполнении схемы расположения допускается применять различные способы построения (аксонометрию, план, условную развертку, разрез конструкции и т. д.).
Пример схемы электрической расположения приведён на рисунке 5.
Рисунок 5 – Пример схемы электрической расположения
Схемами подключений (Э5) называют схемы, показывающие внешние подключения аппаратов, установок, щитов, пультов и т. д.
Схемы подключений используют при монтаже проводок, при помощи которых установка, прибор, аппарат подключаются к источникам питания, щитам, пультам и т. п.
Электрические связи на схемах подключений изображают сплошными линиями. Для сокращения числа линий многопроводные линии одного назначения изображают одной линией, и лишь в местах присоединения к приборам, исполнительным механизмам и аппаратам провода разделяют, чтобы показать их маркировку.
Шкафы, пульты, отдельные приборы и аппараты на схемах подключений условно обозначают прямоугольниками, а электродвигатели – кружками. Внутри условно-графического обозначения делают необходимые надписи.
На проводках указывают номер проводки, марку, сечение и длину проводов и кабелей. Провода, жгуты и кабели изображают линиями толщиной 0,4...1,0 мм.
Схемы подключений выполняют без соблюдения масштаба в удобном для пользования виде. Пример выполнения схемы подключений показан на рисунке 6.
Рисунок 6 – Пример выполнения схемы подключений
(Общая схема подключения измерительных датчиков к ТРМ 138)
При проектировании автоматизации технологических процессов производится выбор следующих элементов:
– первичные измерительные преобразователи (датчики) (при наличии);
– вторичные электроизмерительные приборы: логометры для измерения температуры (в комплекте с термопреобразователями) Ш69000, Ш69001, Ш69006; электронные мосты КСМ 2, КСМ 4, КПМ1; электронные потенциометры КПП1, КСП 2;
– исполнительные элементы (магнитные пускатели, тиристоры);
– автоматические регуляторы (при наличии): регуляторы температуры – DIGITOP, РТМ-2000,
WATTS WFHT-RF LCD; цифровой регулятор влажности воздуха ВР-1, регулятор влажности почвы
GARDENA 1188-20, регулятор освещённости – фотореле типа ФР-9М, AZH, ФРЛ-11 2-100Лк 20А;
– программные реле ПИК-2, УТ1-РiC и реле времени ВЛ-55М1 AH3-NC-220V AC (при наличии);
– промежуточные реле (при наличии);
– командоаппараты – кнопки, переключатели (при наличии);
– сигнальные аппараты – светосигнальная арматура DEKRAFT ADDS, AD-22DS 24В AC/DC; звонок МЗМ-1 (при наличии).
– аппараты защиты (автоматические выключатели, предохранители, тепловые реле, устройства УВТЗ и др.).
При выборе элементов необходимо производить ссылку на литературные источники и интернетресурсы.
Выбор первичных измерительных преобразователей температуры. Датчики температуры подразделяются на термометры расширения (жидкостные стеклянные, манометрические и биметаллические), манометрические термометры, термопреобразователи сопротивления (проводниковые и полупроводниковые) и термоэлектрические преобразователи. Эти датчики выбираются исходя из назначения (условий среды), измеряемых пределов и градуировки (для термопар и проводниковых термопреобразователей сопротивления).
Выбор первичных измерительных преобразователей давления. При проектировании автоматизации технологических процессов в сельскохозяйственном производстве наибольшее распространение получили электроконтактные манометры. Выбор этих датчиков производится исходя из назначения, предела измерения, рабочего напряжения.
Выбор первичных измерительных преобразователей влажности производится по диапазону измерения, области применения (измерение влажности воздуха, почвы, сыпучих материалов), по напряжению питания.
Выбор датчиков уровня производится по области применения (для сыпучих материалов – мембранные и фотоэлектрческие, для электропроводных жидкостей – электродные, для диэлектрических, а также огнеопасных и взрывоопасных жидкостей – поплавковые), а также по виду выходного сигнала (механический, электрический)
Выбор весов и весодозирующих устройств производится по пределу взвешивания, назначению, производительности, объёму ковша.
Выбор расходомеров производится по назначению (для газообразных или жидких сред) и пределу измерения.
Выбор датчиков положения (путевых и конечных выключателей) – по назначению.
Выбор усилителей производится по виду усиливаемой энергии (электронные, пневматические, гидравлические, а также по коэффициенту усиления).
Автоматические регуляторы приборного, аппаратного и агрегатного типов выбираются исходя из назначения (температуры, влажности, освещённости, давления, уровня и др.) и из пределов регулирования.
Вторичные приборы (автоматические мосты, потенциометры, логометры и др.) выбираются в зависимости от назначения, а также вида и градуировки первичных измерительных преобразователей.
Выбор магнитного пускателя.
Условия выбора:
Iн.п. ≥ Iн.дв; (1)
Uкат = Uу; (2)
Iн.п.≥ ki∙Iн.дв /6, (3)
где Iн.п. – номинальный ток магнитного пускателя, А;
Iн.дв. – номинальный ток электродвигателя, коммутируемого магнитным пускателем, А; Uкат – напряжение втягивающей катушки, В; Uу – напряжение цепи управления, 220 В.
Из каталожных данных принимается магнитный пускатель типа __________ с техническими данными: Iн.п.= __ А; Uкат = ___ В; (далее приводятся: исполнение пускателя по назначению и наличию теплового реле, по степени защиты и наличию кнопок, по числу и исполнению контактов (замыкающих и размыкающих) вспомогательной цепи, климатическое исполнение и категория размещения по ГОСТ 15150-69, область применения).
Выбор силовых тиристоров. При выборе тиристоров для асинхронных короткозамкнутых электродвигателей необходимо учитывать режим работы электродвигателя и условия охлаждения тиристоров. Если электродвигатель работает в продолжительном режиме с нечастыми пусками, то нагрузкой тиристоров можно считать номинальный ток электродвигателя. При большой частоте включений электродвигателя за расчётный ток принимают пусковой ток электродвигателя. Длительный ток тиристоров зависит от условий охлаждения. При естественном воздушном охлаждении допустимый ток нагрузки тиристоров серии Т составляет всего 35% значения номинального тока. Например, тиристор Т100 при естественном воздушном охлаждении допускает длительную нагрузку 35 А, при принудительном воздушном охлаждении со скоростью 6 м/с – 85 А, при скорости 12 м/с – 100 А. Тиристоры допускают кратковременные перегрузки по току. Так, тиристоры серии Т допускают 25% перегрузки в течение 30 с, 50% – в течение 5 с, 100% – в течение 1 с.
Программные реле и реле времени выбирают по назначению и по требуемой выдержке времени.
Электродвигательные исполнительные механизмы и рабочие органы выбирают по назначению.
Командоаппараты (кнопки, выключатели, переключатели и др.) выбирают по назначению и числу входящих в них элементов (кнопок, секций и др.)
Сигнальные аппараты (лампы, звонки) выбирают по назначению, исполнению и по напряжению питания.
Выбор автоматического выключателя. Выбор автоматического выключателя производится из условий:
U Uна ≥ у, (4)
Ιна ≥ Ιр, (5)
Iнр ![]() Iр (автомат на открытом
воздухе), (6)
Iр (автомат на открытом
воздухе), (6)
Ιнр ≥1,1⋅Ιр (автомат в шкафу), (6а)
где Uна – номинальное напряжение автоматического выключателя, В; Uу – напряжение электроустановки, В;
Iна – номинальный ток контактов автомата, А;
Iр – рабочий ток, А;
Iнр – номинальный ток расцепителя, А. Определяется рабочий ток:
Iр = Iн1 + Iн2 + … + Iнn , (7) где Iн1, Iн2,…, Iнn – номинальные токи потребителей, коммутируемых автоматом, А.
Из каталожных данных […с._ ] принимается автоматический выключатель, выписываются: тип, технические данные: Uн = __ В; Iна = __ А; Iнр = __ А; кратность силы тока срабатывания kср = __.
Выбранный автоматический выключатель проверяется на ложные срабатывания из условия:
Iср.к ![]() Iср.р, (8)
где Iср.к – каталожное значение тока срабатывания, А; Iср.р
– расчетное значение тока срабатывания, А.
Iср.р, (8)
где Iср.к – каталожное значение тока срабатывания, А; Iср.р
– расчетное значение тока срабатывания, А.
Iср.к = kср·Iн.р, (9)
Iср.р = 1,25·Iкр, (10) где Iкр – кратковременный ток, А.
Iкр = ki∙Iн.max + Iн1 + Iн2 + … + Iнn, (11)
где Iн.max – номинальный ток электродвигателя наибольшей мощности, А; Iн1, Iн2,…, Iнn – номинальные токи остальных электродвигателей, А; ki – кратность пускового тока электродвигателя наибольшей мощности. При выполнении условия (11) ложных срабатываний не будет.
Стандартами и инструктивными документами на щиты и пульты определены их типоразмеры, способы и места расположения аппаратуры, общие требования к прокладке и выбору марок проводов и т. д. Заводы-изготовители щитов имеют полный комплект конструкторской и технологической документации на все типоразмеры щитов и пультов. С учетом этого, проектирование щитов и пультов сводится к выбору типоразмера, размещению аппаратуры и приборов на щите, выбору мест прокладки жгутов проводов, соединений и подключения проводов к аппаратуре, зажимам коммутационным и приборам.
Основные элементы щитов и пультов определены ОСТ 3.31-76:
Каркас – жесткий, несущий, объемный или плоский металлический остов, предназначенный для установки на нем панелей, стенок, дверей, крышек, поворотных рам, унифицированных монтажных конструкций.
Шкаф – объемный каркас на опорной раме с установленными на нем панелью, стенками, дверями, крышкой.
Панель с каркасом – объёмный каркас на опорной раме с установленной на нем панелью.
Стойка – объемный или плоский каркас на опорной раме.
Корпус пульта – объёмный каркас с установленными наклонными столешницей, стенками, дверями.
Щит шкафной – шкаф с установленными на унифицированных монтажных конструкциях аппаратурой, установленными изделиями и электрической проводкой, подготовленными к подключению внешних проводок.
Щит панельный с каркасом –- панель с каркасом и аппаратурой, подготовленный к подключению внешних проводок.
Статив – стойка с объемным каркасом с установленной аппаратурой, готовая к подключению.
Пульт – корпус с установленными арматурой, монтажными изделиями, готовый к подключению.
Панель декоративная – предназначена для монтажа элементов мнемосхемы.
Исходные материалы для проектирования общих видов щитов и пультов:
– функциональные схемы;
– принципиальные схемы;
– чертежи щитового помещения. Классификация щитов и пультов По назначению:
1. Оперативные, с которых ведутся управление и контроль за технологическим процессом.
2. Неоперативные, предназначенные для установки аппаратов, приборов и устройств, не используемых непосредственно для управления и наблюдения за технологическим процессом.
3. Диспетчерские, с которых диспетчер, получающий информацию о состоянии оборудования и основных параметров, ведет наблюдение и при необходимости производит оперативные переключения или передает нужные распоряжения.
4. Блочные (БЩУ) – для управления энергоблоками, могут включать в себя оперативный и неоперативный контур.
По исполнению:
1. Шкафные одиночные щиты двух- и трехсекционные с задними дверями.
2. Панельные щиты с каркасом.
3. Шкафные щиты с передней и задней дверью.
4. Стативы в качестве конструкции для установки вспомогательной аппаратуры.
5. Пульты в качестве устройств для размещения аппаратуры управления и сигнализации.
С учётом изложенного, при проектировании всегда можно выбрать наиболее приемлемые типы щитов и пультов для конкретного объекта.
ТЕМА 2.2 АВТОМАТИЗАЦИЯ
В ЖИВОТНОВОДСТВЕ
В сельском хозяйстве воду используют для нужд населения и поения животных, приготовления пищи и кормов, полива растений, тушения пожаров и для других производственных целей.
Водоснабжение сельскохозяйственных потребителей хорошо механизировано и автоматизировано. Благодаря механизации и автоматизации человек практически освобожден от ручного труда при добыче, доставке и распределении воды на животноводческих фермах и в быту. Производительность труда по водоснабжению увеличилась в 20 раз, эксплуатационные затраты снизились в 10 раз. Кроме того, при поении животных из автопоилок увеличивается продуктивность КРС на 10 %, а птицы – на
15...20 %.
Для подъёма и раздачи воды применяют водонасосные установки, состоящие из водоприемников, очистных сооружений, резервуаров чистой воды или водонапорных башен, соединительной водопроводной сети и электронасосов со станциями управления. Наиболее широко в сельском хозяйстве распространены центробежные и осевые насосы. Их выполняют в моноблоке с электродвигателями и погружают в воду, в трубчатые колодцы диаметром 100...250 мм (погружные насосы) или располагают на поверхности земли. Есть погружные насосы с электродвигателями, расположенными над скважиной. Эти насосы называют артезианскими.
Для подъёма воды из открытых водоемов и шахтных колодцев применяют также плавающие центробежные насосы. Широко распространены так называемые объёмно-инерционные насосы с электромагнитным вибрационным приводом. Эти насосы имеют малую подачу воды (до 1 м3/ч при напоре 20 м). Сельское население использует их в быту.
В сельском хозяйстве применяют водонасосные установки трёх типов: башенные с водонапорным баком, безбашенные с водонапорным котлом и с непосредственной подачей воды в водонапорную сеть. Почти в 90 % случаев используют башенные водонасосные установки с расходом воды до 30 м3/ч. Если расход воды составляет З0...65м3/ч, то рекомендуют двухагрегатные насосные станции с водонапорным котлом. При расходе воды более 65 м3/ч экономически целесообразно использовать насосные установки с непосредственной подачей воды в распределительную сеть (оросительную систему).
Автоматическая водоподъёмная установка типа ВУ с воздушно-водяным котлом (гидропневматическим аккумулятором) предназначена для подъёма воды из открытых водоёмов и шахтных колодцев глубиной до 5 м при напоре от 25 до 80 м. Установка состоит из всасывающей трубы 1 (рисунок 1) с приёмным фильтром, насосного агрегата 2, нагнетательного 3 и водоразборного 12 трубопроводов с запирающими вентилями 5, воздушно-водяного бака 4 с датчиком давления 8и струйным регулятором запаса воздуха, имеющим камеру смешивания 6, воздушный клапан 7, жиклёр 10 и диффузор 11.
Система автоматического управления работает следующим образом. Вода к потребителю поступает под давлением воздушной подушки, расположенной над водой в котле.
При разборе воды из котла давление в нём снижается и срабатывает манометрический датчик давления (позиция 1) (рисунок 2), который подаёт команду исполнительному элементу (позиция 3) на включение электронасоса. При повышении уровня воды давление в котле увеличивается до заданного значения, при котором датчик давления даёт команду на отключение насоса. При останове электронасоса закрывается его шаровой обратный клапан 4 на трубопроводе. Вода из участка трубы между обратным клапаном 4 и муфтой 2 выливается в скважину. В этом участке трубы образуется разрежение, и он заполняется воздухом через щелевой клапан 3. При следующем включении насоса клапан 3 закрывается и воздух вместе с водой перекачивается в бак 7. Объём воздушной подушки в баке постоянно уменьшается, так как часть воздуха растворяется и выносится с водой. Вследствие этого уменьшаются давление воздушной подушки и регулирующий объем воды в котле, а агрегат начинает чаще включаться в работу.
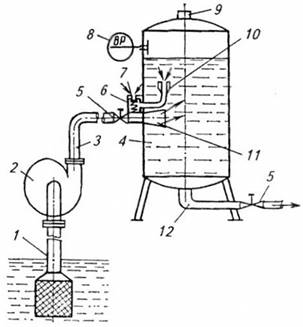
1 – всасывающая труба; 2 – насос; 3, 12– трубопроводы; 4 – бак; 5 – вентили; 6 – камера; 7 – воздушный клапан; 8 – датчик давления; 9 – предохранительный клапан; 10 – жиклёр; 11 – диффузор Рисунок 1 – Технологическая схема водоподъёмной установки типа ВУ
1 – погружной насос; 2 – муфта; 3, 5 – воздушные клапаны; 4 – обратный клапан; 6 – поплавок; 7 – бак-аккумулятор
Рисунок 2 – Функциональная схема автоматизации безбашенной насосной установки
Для автоматического поддержания объема воздушной подушки служит струйный регулятор, который обеспечивает подкачку воздуха до давления в баке 250 кПа. При максимальных аварийных давлениях срабатывает предохранительный клапан 9 (рисунок 1) с поплавковым датчиком. Пополнение воздуха происходит, когда жиклёр 10 перекрыт водой. Струя воды, подаваемая насосом, создает разрежение в камере 6 (эффект пульверизации), воздушный клапан открывается, и воздух, смешиваясь с водой, поступает в котёл.
В автоматических безбашенных установках с вместимостью бака 0,3 м3 вода отделена от воздушной подушки мембраной. При снижении объема воды давление воздушной подушки падает и реле давления включает насос. Насос отключается после восстановления давления, а также аварийно при чрезмерном прогибе диафрагмы. По мере утечки воздуха его запас возобновляется через специальный вентиль докачки воздуха. Недостаток безбашенных насосных установок – низкий коэффициент использования бака.
Принципиальная электрическая схема (рисунок 3) управления безбашенной насосной установкой выполняет следующие требования:
– защита от токов короткого замыкания и перегрузок;
– работа в ручном и автоматическом режимах;
– автоматическое управление электродвигателем насосной установки в функции давления воды в баке-аккумуляторе.
– сигнализация включения и отключение двигателя насоса.
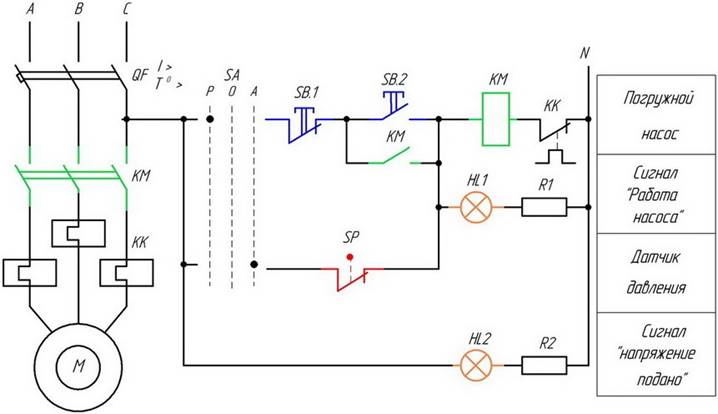
Рисунок 3 – Принципиальная электрическая схема управления безбашенной насосной установкой
Включается автоматический выключатель QF и подаётся питание в главную цепь и цепь управления. При этом загорается сигнальная лампа HL2. Переключателю SA задается режим работы. Для работы в режиме ручного управления переключатель SA ставится в положение «P». При нажатии кнопки SB.2 катушка магнитного пускателя KM получает питание по цепи: фаза C – переключатель SA – кнопка SB.1 – кнопка SB.2 – катушка магнитного пускателя KM – контакт теплового реле KK – нулевой провод. Магнитный пускатель срабатывает и своими главными контактами подключает электродвигатель М к питающей цепи, а при помощи блок-контакта становится на самопитание (это необходимо для того, чтобы при отсутствии кнопки SB.2 катушки магнитного пускателя KМ продолжала получать питание). Электродвигатель начинает работать. Загорается сигнальная лампа HL1. Остановка электродвигателя производится нажатием кнопки SB.1. Для работы схемы в режиме автоматического управления переключатель SA становится в положение «A». При снижении давления до заданного предела замыкаются контакты электроконтактного манометра SP в цепи питания катушки магнитного пускателя KМ, электродвигатель М запускается. Он отключается при достижении максимального давления в баке-аккумуляторе.
|
|
Видеоматериалы к занятию |
До 90 % насосных установок сельскохозяйственного водоснабжения составляют башенные водокачки Рожновского с погружными электродвигателями (рисунок 1, а). Погружные электронасосы типа ЭЦВ (Э – электропогружной, Ц – центробежный, В – для воды) выпускают производительностью 0,63... 1000 м3/ч при напоре 12...680 м.
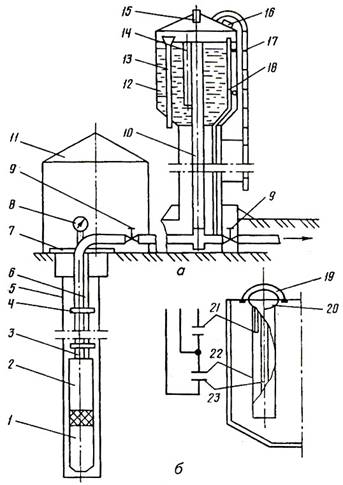
1 – электродвигатель; 2 – насос; 3 – водоподъёмная труба; 4 – хомут; 5 – скважина;
6 – электрический кабель; 7 – плита; 8 – манометр; 9 – задвижка; 10 – трубопровод; 11 – помещение;
12 – бак; 13 – водосливная труба; 14 – датчик уровня воды; 15 – клапан; 16 – люк; 17, 18 – лестницы; 19 – скоба; 20 – защитный корпус; 21, 22, 23 – трубчатые электроды соответственно верхнего уровня, общий и нижнего уровня
Рисунок 1 – Башенная водокачка с погружным электродвигателем (а), схема датчика уровня воды (б)
Погружной электродвигатель 1 в монолите с многоступенчатым насосом 2 закрепляют на водоподъемных трубах 3 и опускают в скважину 5. Трубы подвешивают к плите 7, установленной в помещении 11. Скважины выполняют из обсадных труб диаметром 100...450 мм. Электродвигатели выполняют сухими, полусухими и заполненными маслом или водой. Наиболее распространены электродвигатели, заполненные водой. Резинометаллические или пластмассовые подшипники их смазываются также водой. К электродвигателю подводят кабель 6, закреплённый на водоподъемных трубах хомутами 4. Всасывающая часть имеет сетку, задерживающую крупные примеси, находящиеся в воде.
Бак 12 водонапорной башни выполняют сварным из листовой стали и устанавливают на кирпичную, железобетонную или металлическую опору. К баку подводят напорно-разводяший трубопровод 10. Конец напорной трубы доводят до верхнего уровня, а отвод воды из бака происходит через обратный клапан у нижнего уровня. Бак оборудуют внешней 17 и внутренней 18 лестницами, люком 16, вентиляционным клапаном 15, датчиками уровня 14 и водосливной трубой 13, исключающей перенаполнение бака водой в случае неотключения насоса от датчиков верхнего уровня. На водопроводе ставят манометр 8 и задвижки 9.
Электродный датчик уровня (рисунок 1, б) состоит из защитного корпуса 20, скобы 19 для крепления датчика в баке и трубчатых электродов: верхнего уровня 21, нижнего уровня 23 и общего 22. Внутри центрального электрода расположен нагревательный элемент, который включают в холодное время для исключения обмерзания электродов.
Башенная система водоснабжения обычно работает по следующей схеме: водоисточник – насосный агрегат – напорный трубопровод – водонапорная башня – водопроводная сеть – потребители воды.
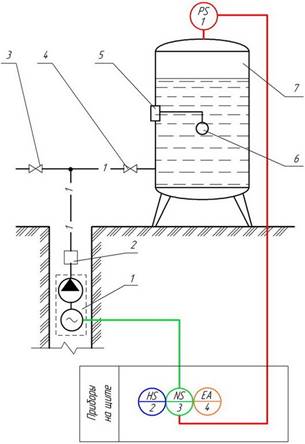
При включении насоса 1 (рисунок 2) вода поступает одновременно и к потребителям, и в напорный бак 3 башни. Количество поступающей в бак воды равно разности между подачей насоса и расходом потребителей. После наполнения бака насосный агрегат отключается, и водоснабжение потребителей обеспечивается водой, запасённой в баке. Стандартные водонапорные башни-колонны имеют вместимость напорного бака от 15 до 50 м3 и более. При этом общая вместимость бака определяется как сумма трех объемов: регулирующего, запасного и «мёртвого».
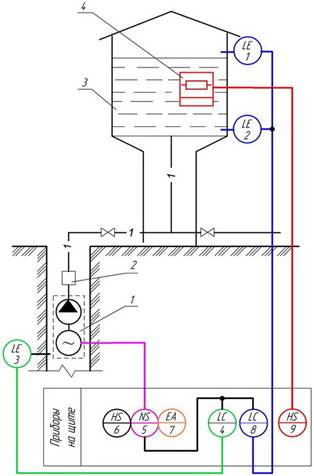
1 – электронасос; 2 – муфта; 3 – напорный бак; 4 – обогреватель датчиков уровня
Рисунок 2 – Функциональная схема автоматизации башенной насосной установки
«Мёртвый» объем, как правило, невелик. Он содержит отстойную часть бака и часть объема бака от его верхней кромки до максимального уровня воды (высотой примерно 0,3 м).
Запасной объем должен хранить хозяйственно-производственный запас на случай перерыва в электроснабжении и, главное, пожарный запас воды, размеры которого определяются строительными нормами и правилами.
Регулирующий объём, подача насоса и текущее потребление воды определяют продолжительность работы насосного агрегата
Сигналы от электродных датчиков уровня (позиции 1 и 2) поступают на управляющее устройство (позиция 4), которое формирует управляющее воздействие на магнитный пускатель (позиция 5), непосредственно управляющий насосным агрегатом. Когда вода достигает верхнего уровня в резервуаре, насосный агрегат отключается и остаётся в таком состоянии до тех пор, пока уровень воды не станет ниже преобразователя нижнего уровня. Насосный агрегат включается в работу и подает воду до заполнения резервуара. Затем цикл работы установки повторяется. При отсутствии воды в скважине датчик «сухого хода» (позиция 3) подаёт сигнал для отключения насоса.
Принципиальная электрическая схема управления башенной насосной установкой приведена на рисунке 3.
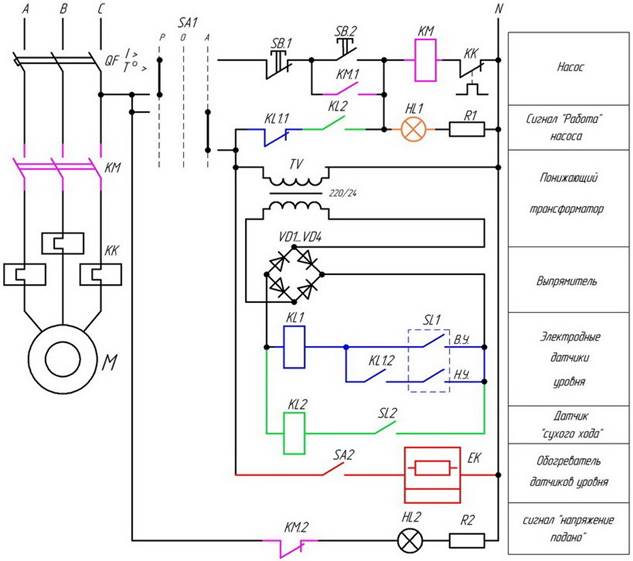
Рисунок 3 – Принципиальная электрическая схема управления башенной насосной установкой
Функции, выполняемые схемой:
– защита от токов короткого замыкания и перегрузок;
– работа в ручном и автоматическом режимах;
– автоматическое управление электродвигателем насосной установки в функции уровня воды в башне;
– отключение электродвигателя насоса при отсутствии воды в скважине;
– обогрев датчиков уровня в зимнее время;
– сигнализация работы двигателя насоса;
– сигнализация подачи напряжения в цепь управления.
Работа схемы
Включается автоматический выключатель QF и подаётся питание в главную цепь и цепь управления. При этом загорается сигнальная лампа HL2. Переключателю SA1 задаётся режим работы. Для работы в режиме ручного управления переключатель SA1 ставится в положение «P». В этом случае управление электродвигателем насоса производится при помощи кнопок SB.1 и SB.2. Для работы схемы в режиме автоматического управления переключатель SA1 становится в положение «A». Насос включается и продолжает работу до тех пор, пока уровень воды в башне не достигнет верхнего датчика уровня SL1. Через воду замкнётся цепь и включится реле KL1, которое своим контактом KL1.1 разомкнёт цепь питания магнитного пускателя KM, насос отключится.
По мере расхода воды уровень её в башне уменьшается, когда он достигнет датчика нижнего уровня, реле KL1 отключится и тем самым замкнёт свой контакт KL1.1 в цепи катушки KМ, насос включится.
В схеме предусмотрен датчик сухого хода. Если в скважине не будет воды, то контакт SL2 разомкнётся, реле KL2 отключится, контакт KL2.1 разомкнет цепь питания магнитного пускателя KM, электродвигатель насоса отключится.
В зимнее время при помощи тумблера SA.2 включается обогреватель EK электродных датчиков уровня во избежание их обледенения.
|
|
Видеоматериалы к занятию |
УРОК №14. ОСНОВЫ РЕГУЛИРОВАНИЯ МИКРОКЛИМАТА В ПОМЕЩЕНИЯХ.
Под оптимальными параметрами микроклимата понимаются допустимые значения температуры, влажности и скорости движения воздуха, содержание в нем вредных газов (диоксида углерода – СО2, аммиака – NH3, сероводорода – H2S), микроорганизмов (бактерий), частиц пыли, а также освещение и облучение. Установлено, что продуктивность животных и птицы на 50...55 % зависит от рациона кормления, на 20...25 % – от породы и уровня селекционно-племенной работы и на 20...30 % – от параметров микроклимата. При недопустимых параметрах микроклимата не только падает на 20...30 % продуктивность, но и сокращаются сроки племенного и продуктивного использования животных и птицы.
Температура воздуха наиболее существенно влияет на продуктивность животных и птицы и поедаемость ими корма. При понижении температуры теплоотдача тела животных увеличивается, что сказывается на росте потребления корма, а при более низких, так называемых критических температурах, наступают их переохлаждение и заболевание. Оптимальной считают такую температуру воздуха, при которой продуктивность животного наивысшая, а расход кормов и стоимость технических средств для обеспечения микроклимата минимальные. При температурах ниже критических требуются энергетические установки для дополнительного обогрева помещений. Длительное действие высокой температуры также отрицательно влияет на продуктивность и состояние животных. У животных развивается тепловое перенапряжение, сопровождающееся понижением аппетита и пищеварения. Это вызывает резкое снижение их продуктивности, увеличение удельного расхода корма на 1 кг прироста массы и расстройство нервной системы.
В зависимости от породы и возраста животных определены следующие оптимальные значения температур в помещениях: для телят КРС – от 8 до 15 °С, для взрослых особей – от 8 до 18 °С; для курнесушек напольного содержания – от 12 до 14°С, клеточного содержания – от 15 до 18 °С; для цыплятбройлеров – от 26 до 32 °С.
Влажность воздуха также существенно влияет на состояние здоровья и продуктивность животных и птицы. Влажность в помещениях образуется вследствие жизнедеятельности животных и испарения воды с пола, стен помещения и кормушек. На каждую голову КРС образуется от 7 до 25 кг воды и влаги в сутки, а для свиней – до 20 кг. Высокая влажность воздуха отрицательно действует на организм животного как при низких, так и высоких температурах воздуха. Высокие влажность и температура затрудняют теплоотдачу организма, особенно при малой скорости воздуха. Это вызывает его перегревание. При высокой влажности и низкой температуре воздуха животное теряет большое количество теплоты, что вызывает его охлаждение и простудные заболевания. При этом ухудшается аппетит животных и снижается их продуктивность, а также сокращается срок службы оборудования. Чрезмерно низкая влажность воздуха при повышенной температуре усиливает потерю влаги организмом, что вызывает у животного жажду и потливость. Кроме того, увеличивается запыленность воздуха, что приводит к респираторным заболеваниям животных. Оптимальная относительная влажность воздуха в животноводческих помещениях для КРС должна быть от 40 до 85 %, свиней – от 40 до 75 %, овец – 75 %, птицы – от 60 до 70 %.
Таким образом, в летнее время в животноводческих помещениях наблюдается избыточное количество теплоты и влаги, а в зимний период года – их недостаток.
Диоксид углерода образуется при дыхании животных и ферментации навоза и корма. Увеличение количества диоксида углерода в воздухе до 0,5 % вызывает у животных поверхностное учащенное дыхание, а у птицы, наоборот, замедление и даже остановку дыхания. При длительном повышенном (более 1 %) содержании диоксида углерода происходит хроническое отравление животных.
Предельно допустимая концентрация диоксида углерода должна быть не более: для телят – 0,15 %; взрослых особей КРС, овец и птицы – 0,25; свиней – 0,2 %.
Аммиак образуется от гниения органических выделений (моча, кал). Он хорошо растворяется в воде, поэтому адсорбируется влажными оболочками глаз и дыхательных путей, вызывая сильное их раздражение. При большой и длительной концентрации аммиака у животных снижается содержание гемоглобина и эритроцитов в крови, ухудшается функция пищеварения, а при концентрации 1...3 мг/л наступает смерть животных от отёка лёгких.
Допустимо предельная концентрация аммиака в воздухе для телят, взрослых особей КРС, свиней и овец – 0,02 мг/л; птицы – 0,015 мг/л.
Сероводород на фермах образуется в результате гниения белковых веществ, содержащих серу в навозоприёмниках. Это очень токсичный бесцветный газ с запахом тухлых яиц. Концентрация его в воздухе свыше 0,015 мг/л затормаживает окислительные процессы в организме, вызывает отек и воспаление легких и разрушает нервную систему. Предельно допустимое содержание сероводорода в воздухе для телят и птицы – 0,005 мг/л, а взрослых КРС, свиней и овец – 0,01 мг/л.
Запылённость и бактериальная загрязненность воздуха отрицательно влияют на здоровье и могут вызывать эпидемические заболевания животных и птиц. Максимально допустимая микробная загрязнённость воздуха на фермах должна быть не более: для телят в возрасте до 4 мес. – от 20 до 50 тыс. микробных тел в 1 м3, старше 4 мес. – 70; для поросят-отъёмышей и ягнят – от 40 до 50; свиней – от 50 до 80 тыс. микробных тел в 1 м3.
Скорость движения воздуха на фермах влияет особенно на молодняк. Большая скорость воздуха вызывает простудные заболевания, а малая затрудняет очистку помещений от влаги, пыли и вредных микроорганизмов. Поэтому установлены следующие скорости движения: зимой от 0,2 до 0,4 м/с, летом – от 0,5 до 1,15 м/с.
Производственные шумы выше допустимых норм также отрицательно влияют на животных, птицу и обслуживающий персонал. Допустимая интенсивность шума при низких частотах 90 дБ, а при частотах свыше 1 кГц 70...85 дБ.
Световой режим существенно влияет на все функции организма животного и проявляется в форме светового, теплового и химического воздействия. Солнечный свет оказывает весьма положительные действия на физиологические процессы, в том числе на нервную и половую системы. При «световом» голодании ухудшается состояние организма, снижаются продуктивность, естественная резистентность, половая активность и оплодотворяемость. В зимнее время недостаточную солнечную освещённость компенсируют электрическим светом. Нормы освёщенности выражают в люксах (лк). Для КРС, свиноматок, поросят, кур требуется не менее 30 лк при использовании ламп накаливания и 70 лк от газоразрядных ламп. Кроме освещения применяют также облучательные световые установки, работающие в инфракрасной зоне при длине волны от 0,7 до 2,5 мкм для теплового воздействия и в ультрафиолетовом диапазоне для эритемного и бактерицидного воздействия на животных и птицу.
Средства управления микроклиматом на фермах предназначены для поддержания параметров в оптимальных диапазонах, при которых наблюдается наибольшая продуктивность животных и птицы, наилучшие условия и высокая производительность труда обслуживающего персонала, надежная и длительная работа оборудования.
Параметрами микроклимата управляют с помощью энергетических установок и комплекса мероприятий, к которым относятся рациональная планировка самих помещений, использование строительных материалов с соответствующими теплотехническими свойствами, прогрессивные технологии содержания, кормления, поения и удаления навоза и помета, а также системы отопления и вентиляции.
В тёплых регионах, где температурный режим в холодный период обеспечивается за счет тепловыделений самих животных и рабочих машин, требуемые параметры микроклимата помещений обеспечиваются средствами естественного воздухообмена.
В регионах с низкими наружными температурами в зимний период используют системы воздушного отопления совместно с вентиляцией, а в летний период – только вентиляцию, включаемую во время превышения температуры в помещениях выше допустимых значений.
В помещениях для выращивания молодняка животных используют комбинированные системы отопления – воздушные и водяные (паровые). Дополнительно к общему воздушному отоплению в этих помещениях используют локальные источники теплоты в виде ламп или газовых горелок инфракрасного излучения, электрообогреваемых панелей, закрепляемых на стенах и потолках, а также электробрудеров
– металлических подвешенных зонтов с электронагревательными элементами. Локальные источники используют для создания более высокой температуры в местах скопления молодняка (цыплят, поросят).
В связи с увеличением стоимости энергии созданы упрощённые кондиционеры, которые очищают внутренний воздух на фермах без выбрасывания его наружу.
Вентиляционные системы бывают естественные (гравитационные) и механические. В гравитационной системе воздухообмен в помещении происходит с помощью приточных и вытяжных каналов за счёт разности плотностей холодного наружного и теплого внутреннего воздуха, а также под влиянием ветра. В механической системе вентиляция осуществляется принудительно с помощью электровентилятора.
Преимущества гравитационной вентиляции – небольшая стоимость, простота и надёжность устройства и эксплуатации, бесшумность работы. Однако она хорошо работает только при большом перепаде температур внутреннего и внешнего воздуха.
Принудительная вентиляция дороже, сложнее, создает неприятные шумы, однако с помощью ее можно регулировать кратность воздухообмена в широких пределах. Поэтому ее широко применяют на крупных фермах промышленного типа.
Системы воздушного отопления делят на местные и централизованные. Основные части систем:
тепловой центр, приточный и вытяжной воздуховоды, трубопровод теплоносителя, теплообменник-утилизатор. Тепловой центр представляет собой электрокалорифер или тепловой генератор (бойлер).
В местной (прямоточной) системе наружный воздух подогревается в тепловом центре до требуемой температуры и подаётся в помещение. Такое же количество воздуха удаляется из помещения по вытяжному воздуховоду. Если воздух требуется только подогреть без его замены, тогда применяют рециркуляционную систему отопления без вытяжного воздуховода.
Централизованные системы имеют большую тепловую мощность, размещаются в отдельном помещении и обогревают несколько помещений. В отличие от местных они имеют приточные воздуховоды и теплообменники.
С точки зрения энергосбережения наиболее предпочтительна система с рекуперацией энергии в теплообменнике. В нём энергия удаляемого из помещения воздуха частично подогревает наружный воздух перед подачей в тепловой центр.
3. Автоматизация вентиляционных установок при помощи станции управления ШАП-5701
Управление вентиляционными установками осуществляется по температуре воздуха в помещениях путём его замены. Это одновременно обеспечивает нормативные значения других параметров. Для вытяжной вентиляции используют оборудование типа «Климат», состоящее из регулируемых по подаче воздуха осевых вентиляторов (ОВ) и станции управления. ОВ укомплектованы специальными трёхфазными асинхронными электродвигателями с повышенным скольжением, у которых при нагрузке в широких пределах изменяется частота вращения в зависимости от подаваемого на статор электрического напряжения (от 70 до 380 В).
В комплект оборудования «Климат» входит от 8 до 24 вентиляторов. Тип и число осевых вентиляторов, устанавливаемых в одном помещении, определяют в процессе расчета воздухообмена для летнего периода.
Оборудование типа «Климат» комплектуют устройствами автоматического регулирования напряжения на зажимах электродвигателей вентиляторов: контактной станцией управления типа ШАП-5701 или бесконтактной тиристорной типа МК-ВАУЗ.
Функциональная схема автоматизации вентиляционной установки показана на рисунке 1. Преобразователь температуры 1 устанавливают в вентилируемом помещений. Логическое или непрерывное управление частотой вращения электродвигателей вентиляторов осуществляется устройством 2.
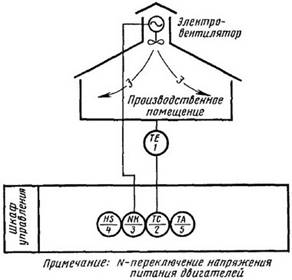
Рисунок 1 – Функциональная схема автоматизации вентиляционной установки
Контактная станция ШАП-5701 дополнительно требует специальный автотрансформатор, переключением ответвлений которого меняется напряжение на группе электродвигателей вентиляторов. Комплект вентиляционного оборудования «Климат-4» обеспечивает ступенчатое изменение подачи вентиляторов путем трехступенчатого регулирования частоты вращения электровенгилятора и включение различного числа вентиляторов, разделенных на три группы.
Управляющее устройство состоит из двух трёхпозиционных регуляторов температуры типа ПТР 304. На выходе регулятора в зависимости от температуры регулируемой среды могут быть получены три команды: «выше», «норма» и «ниже». Регуляторы настроены на разные температуры срабатывания: настройка температуры регулирования одного регулятора на несколько градусов выше настройки температуры регулирования другого регулятора. Это позволяет составить логические схемы управления магнитными пускателями, которые подключают к разным ступеням напряжения, снимаемого с автотрансформатора, группы вентиляторов. В соответствии с принципиальной схемой включения электровентиляторов (рисунок 2) используются следующие режимы вентиляционной установки по подаче:
1 – работают все вентиляторы с максимальной подачей (включены магнитные пускатели KM3,
KM4, KM5);
2 – работают все вентиляторы со средней подачей (включены KM2, KM4, KM5 и KM6);
3 – работают только первая и вторая группы вентиляторов с малой подачей (включены KM1, KM5 и KM6);
4 – отключены все вентиляторы.
Для изменения подачи вентиляторов их подключают к ступеням напряжения автотрансформатора 380, 160 и 110 В, что соответствует подаче 100, 66 и 33%. Режим работы вентиляционной установки выбирают в зависимости от температуры в помещении: если температура выше заданной уставкой на первом регуляторе, то включается режим 1; при температуре в помещении, меньшей заданной уставкой второго регулятора, – режим 6. Остальные режимы работы вентиляционной установки выбирают в диапазоне промежуточных температур, заданных уставками регуляторов SK1 и SK2.
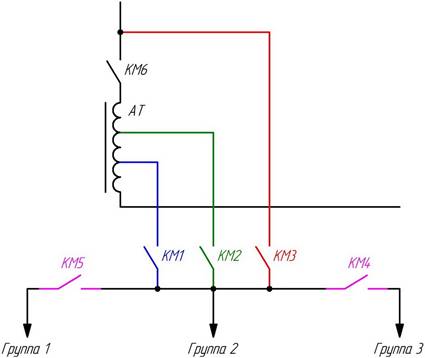
Рисунок 2 – Однолинейная схема включения вентиляторов комплекта «Климат-4»
Схема логического выбора режимов управления в зависимости от температуры в помещении с учётом особенностей соединения контактов регулятора ПТР 3-04 показана на рисунке 3.
Контакты терморегуляторов SK1 и SK2 замыкаются в зависимости от температуры в помещении:
SK1−1, SK2 1− − выше нормы
|
SK1 2 SK− , 2 2− SK1 3 SK− , 2−3 |
− нор ам замкнуты − ниже н ормы |
Уставка (задаваемая температура) регулятора SK2 на 2-3˚С меньше уставки SK1.
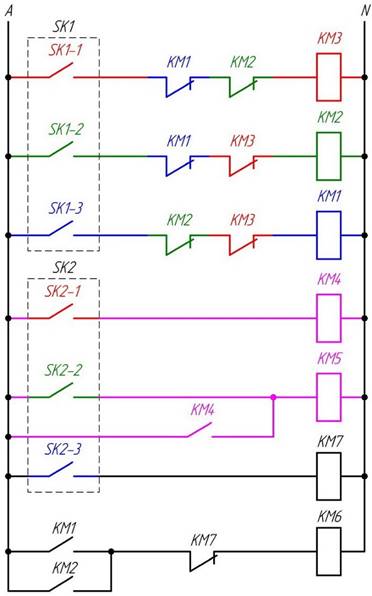
Рисунок 3 – Упрощённая схема управления вентиляционной установкой «Климат-4»
Работа схемы
Примем, что регулируемая температура равна 24 ˚C. Задаваемая температура на регуляторе SK1 составляет 24 ˚C, а на регуляторе SK2 – на 2 ˚C ниже, то есть 22 ˚C.
При температуре воздуха 27 ˚C SK1-1 и SK2-1 замкнуты, срабатывают магнитные пускатели KM3, KM4 и KM5, электродвигатели всех вентиляторов включены на максимальную частоту вращения.
При температуре воздуха 24 ˚C SK1-2 и SK2-1 замкнуты, срабатывают магнитные пускатели KM2,
KM4, KM5 и KM6, электродвигатели вентиляторов включены на частоту вращения 66% от номинальной.
При температуре воздуха 22 ˚C SK1-3 и SK2-2 замкнуты, срабатывают магнитные пускатели KM1, KM5 и KM6, электродвигатели групп 1 и 2 включены на частоту вращения 33% от номинальной, электродвигатели группы 3 отключены.
При температуре воздуха ниже 22 ˚C SK1-3 и SK2-3 замкнуты, срабатывают магнитные пускатели KM1, KM5 и KM7, отключающий KM6, электродвигатели всех вентиляторов отключаются.
|
|
Видеоматериалы к занятию |
УРОК №15. АВТОМАТИЗАЦИЯ ВЕНТИЛЯЦИОННЫХ УСТАНОВОК ПРИ ПОМОЩИ ТИРИСТОРНОЙ СТАНЦИИ УПРАВЛЕНИЯ «КЛИМАТИКА-1»
Исследования показали, что применение плавного автоматизированного регулирования подачи вентиляторов в птичнике по выращиванию животных и птицы позволяет улучшить качество регулирования параметров микроклимата, увеличить среднесуточный прирост до 3,5 % и обеспечить экономию электроэнергии до 15 % по сравнению со ступенчатым регулированием.
Непрерывное изменение параметров микроклимата внутри животноводческих, птицеводческих и других производственных помещений требует непрерывного контроля и управления установками микроклимата. Управлять вентиляционными установками экономичнее и удобнее при помощи датчиков и регуляторов, регулирующих соответствующие параметры микроклимата.
Устройство «Климатика-1» (рисунок 1) предназначено для поддержания заданной температуры воздуха в производственных помещениях путём плавного изменения частоты вращения асинхронных электродвигателей вытяжных вентиляторов при помощи изменения напряжения на их зажимах в зависимости от фактической и заданной температуры воздуха внутри помещения. Напряжение регулируют при помощи трёхфазного тиристорного регулятора напряжения, действующего по принципу фазового регулирования угла открытия тиристоров в зависимости от температуры воздуха в помещении.
 а
б
а
б
Рисунок 1 – Внешний вид станции управления «Климатика-1» (а) и тиристоров на станции управления «Климатика-1» (б)
В устройствах типа «Климатика-1» применены более совершенные и надёжные схемы с использованием аналоговых и цифровых микросхем, предусмотрены защиты от обратного порядка следования фаз, бросков напряжения питания и другие.
На панели управления при помощи задатчика устанавливается требуемая для поддержания в помещении температура в пределах от 0° до 40 °С. Устройство предназначено для работы в помещениях, где температура воздуха при эксплуатации должна быть в пределах от 0° до 40 °С, относительная влажность воздуха – 80 % при 20 °С, верхнее значение – 98 % при 25 °С.
Конструктивно устройство «Климатика-1» состоит из металлического корпуса, в котором размещены силовой блок и блок управления, и отдельно расположенного блока переключателя, позволяющего включать электродвигатели как через устройство управления, так и минуя его.
Оборудование «Климат-4М» комплектуется тиристорной станцией управления ТСУ-2КЛУ3 («Климатика-1»).
Устройство «Климатика-1» (рисунок 2, а) представляет собой тиристорный регулятор с цифровой системой управления, обеспечивающей плавное изменение выходного напряжения в зависимости от температуры воздуха в помещении. Сигнал управления формируется системой регулирования (рисунок 2, б).
В силовой блок станции управления (рисунок 2, а) входят шесть тиристоров VS1...VS6 на групповом охладителе (три пары, включенных по встречно-параллельной схеме), автоматический выключатель QF и защитные элементы тиристоров: варисторы RU, защищающие тиристоры от перенапряжений сети; RC-цепи, защищающие их от коммутационных перенапряжений; конденсаторы С4...С6, ограничивающие скорость нарастания напряжения при подключении устройства к питающей цепи.
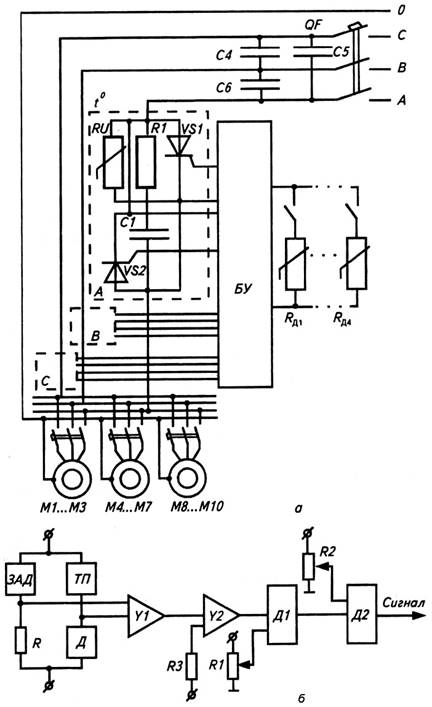
Рисунок 2 – Тиристорная станция управления «Климатика-1» (а) и схема формирования сигнала управления (б)
В блок управления станции БУ входят две печатные платы, два питающих трёхфазных трансформатора, узел защиты и панель управления. На печатных платах смонтированы системы фазного регулирования угла открытия тиристоров, транзисторные усилители и импульсные трансформаторы, обеспечивающие кратковременные импульсы напряжения в цепях управления тиристоров для обеспечения их открытия.
Узел защиты осуществляет защиту блока управления от обратного чередования фаз, неполнофазного режима и от бросков напряжения питания в момент включения устройства. Срабатывание узла защиты сопровождается световой сигнализацией, выполненной на светодиоде.
С каждым устройством «Климатика-1» поставляется комплект из четырех термопреобразователей (термодатчиков) R10…R12, в качестве которых служат термометры сопротивления типа ТСМ (до четырёх), включаемые параллельно и распределенные по длине помещения.
Устройство «Климатика» устанавливают на стене на высоте 1,5 м от пола в специальном отсеке птицеводческого или животноводческого помещения. Термодатчики подключают к блоку управления экранированным проводом с сопротивлением не более 1 Ом. Сопротивление изоляции между силовым клемником и корпусом должно быть не менее 5 МОм.
Сигнал разбаланса вырабатывается измерительным мостом, в плечи которого включены задатчик ЗАД, термопреобразователь ТП, резистор R и узел Д переключения числа измерительных преобразователей (до четырёх). Усиленный в усилителе У1 сигнал на входе усилителя У2 суммируется с сигналом задания базового напряжения Uб, определяющим уровень выходного напряжения при сбалансированном измерительном мосте, т. е. при соответствии температуры заданному уровню.
Нелинейный элемент Д1 ограничивает на требуемом уровне, задаваемом R1, минимальное значение выходного напряжения, соответствующее минимальной частоте вращения вентиляторов.
В режиме ручного управления выходное напряжение устанавливают переменным резистором R2.
Выходной сигнал системы регулирования подаётся на вход цифровой системы импульсно-фазового управления тиристорами (СИФУ), имеющей три канала А, В, С соответственно числу фаз питающего напряжения (рисунок 3, а).
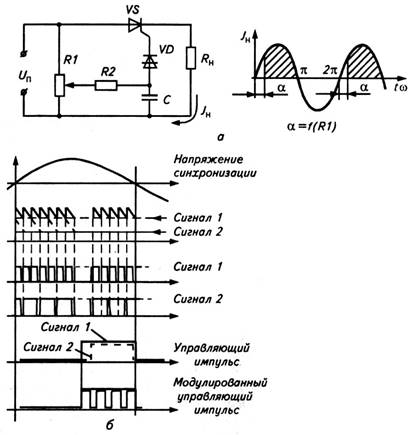
Рисунок 3 – Схема фазового управления тиристором (а) и диаграмма формирования сигнала управления тиристором (б)
Идея метода фазового управления заключается в обеспечении регулируемой задержки по времени момента включения тиристора по отношению к моменту его естественного выключения. Метод реализуется за счет организации регулируемого сдвига фаз между анодным напряжением UП и напряжением Uy, подаваемым на управляющий электрод тиристора рисунок 3, а). При этом управляющий сигнал Uy должен иметь форму импульса с крутым передним фронтом.
Основные элементы СИФУ – аналого-импульсный преобразователь, счётчики, генератор частотного заполнения импульсов и усилители-распределители импульсов.
Аналого-импульсный преобразователь представляет собой генератор, вырабатывающий последовательность импульсов, период следования которых соответствует величине сигнала управления (рисунок 3, б).
Число импульсов подсчитывается, начиная с момента, когда напряжение синхронизации, вырабатываемое специальным узлом, проходит через нуль.
При числе импульсов 80 их счёт прекращается до момента, когда напряжение синхронизации снова станет равным нулю, а усилители-распределители выработают три сдвинутых по фазе на 180° прямоугольных управляющих импульса. Каждый из этих импульсов модулируется частотой, вырабатываемой специальным генератором, и приобретает вид, показанный на рисунке 3, б, а затем поступает к усилителям, формирующим управляющие импульсы, которые включают соответствующие пары тиристоров в силовом блоке устройства.
Включение вентиляторов в режимах малых угловых скоростей, когда выходное напряжение устройства меньше необходимого для пуска двигателя, производится кратковременным увеличением сигнала управления.
Сигнал разбаланса измерительного моста, пропорциональный отклонению температуры в помещении от заданного значения, подаётся на вход усилительных и импульсно-фазных систем управления, которые формируют требуемый угол открытия тиристоров α (рисунок 3, а). С превышением температуры воздуха угол открытия α уменьшается, напряжение на зажимах электродвигателей вентиляторов увеличивается, частота вращения вентиляторов повышается, увеличивая вытяжку воздуха из помещения. Частота вращения изменяется в такой степени, чтобы обеспечить температуру в помещении, заданную задатчиком. С уменьшением же температуры воздуха относительно заданной формируется сигнал в блоке управления БУ, обеспечивающий увеличение угла открытия тиристоров а, которое приводит к снижению напряжения на зажимах электродвигателей и соответственно к уменьшению воздухообмена в такой пропорции, чтобы приблизить температуру воздуха в помещении к заданной.
Установка с приточно-принудительной вентиляцией включает в себя высоконапорный вентилятор 4 с трёхскоростным электродвигателем (рисунок 1), подающий воздух в распределительный воздуховод 5, заборную камеру 1 с заслонкой 2 и теплообменник 3. Частоту вращения электродвигателя вентилятора можно изменять вручную элементами устройства NSA в зависимости от требуемого воздухообмена. Производительность приточной установки регулируется автоматически пропорциональным регулятором TS/SK1 в зависимости от температуры воздуха в животноводческом помещении. Терморегулятор TS/SK2 защищает теплообменник от размораживания.
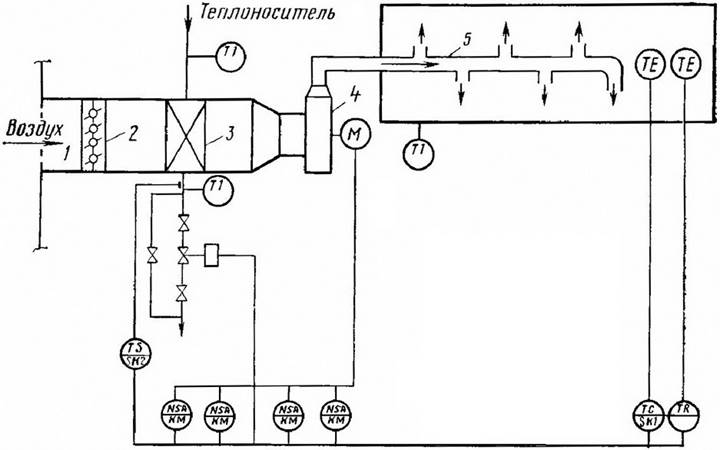
1 – заборная камера; 2 – заслонка; 3 – теплообменник; 4 – высоконапорный вентиль;
5 – распределительный воздуховод
Рисунок 1 – Функциональная схема автоматизации приточной системы регулирования микро-
климата
Для управления вентиляцией используют серийно выпускаемые станции управления ШАП-5712. Принципиальная электрическая схема системы ручного и автоматического управления вентиляцией и подогревом воздуха изображена на рисунке 2. Схема работает следующим образом. В автоматическом режиме переключатели SA1 и SA2 устанавливают в положение «Автоматическое». По команде терморегулятора SK1 включается реле KV1, которое через контакты терморегулятора SK2 включает реле KV2. Последнее посылает сигнал на SA3, а через его контакты включается ступень KМ1,…,KМ3 частоты вращения электродвигателя, которая установлена вручную. Если температура теплоносителя на выходе из теплообменника понизится, то терморегулятор SK2 отключит реле KV2 и через соответствующий магнитный пускатель остановит электродвигатель вентилятора.
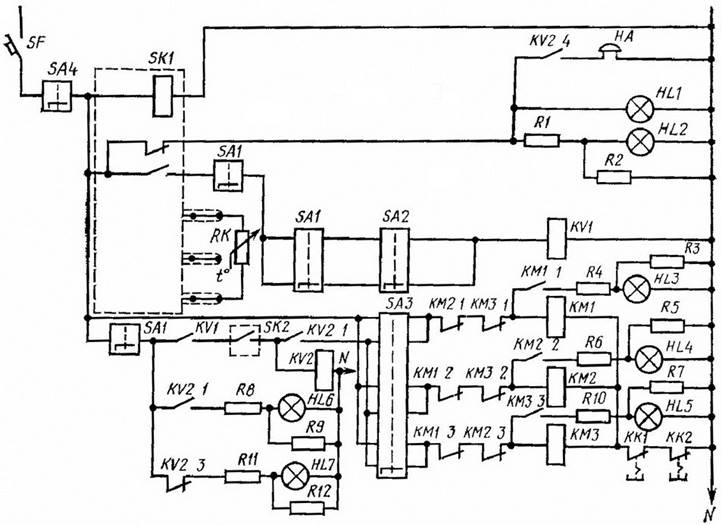
Рисунок 2 – Принципиальная электрическая схема управления приточной вентиляцией
При использовании электронагревателей (например, СФОА) производительность приточных установок изменяют ступенчато. Схема автоматического управления электрокалориферной установкой СФОА (рисунок 3) позволяет корректировать температуру воздуха в помещении в ручном и автоматическом режимах.
В автоматическом режиме переключатели SA1 и SA2 устанавливают в положение «Автоматическое». Если температура в помещении ниже нормы, то терморегулятор SK1 замыкает контакты и включает реле KV, а через контакты последнего – магнитный пускатель KМ3. Происходит одновременная работа вентилятора и первой секции электронагревателей. При дальнейшем понижении температуры терморегуляторы SK2 и SK3 включают вторую и третью секции электронагревателей магнитными пускателями KМ2 и KМ1.
В автоматическом режиме переключатели SA1 и SA2 устанавливают в положение «Автоматическое». Если температура в помещении ниже нормы, то терморегулятор SK1 замыкает контакты и включает реле KV, а через контакты последнего – магнитный пускатель KМ3. Происходит одновременная работа вентилятора и первой секции электронагревателей. При дальнейшем понижении температуры терморегуляторы SK2 и SK3 включают вторую и третью секции электронагревателей магнитными пускателями KМ2 и KМ1.
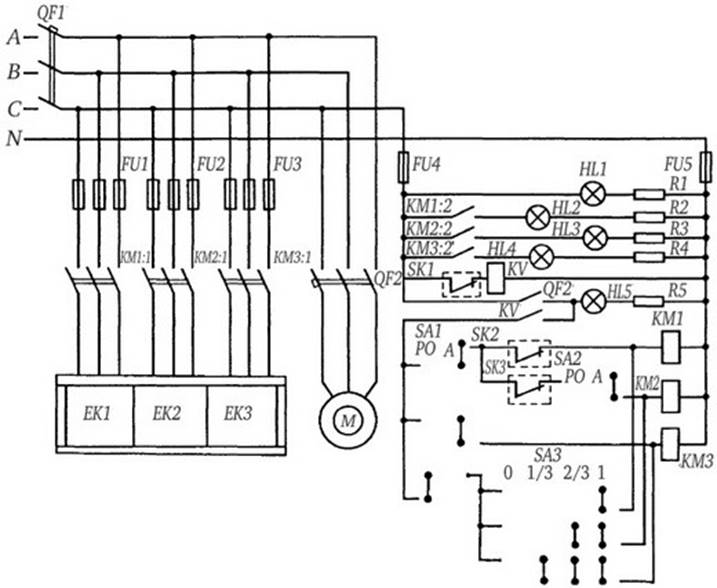
Рисунок 3 – Принципиальная электрическая схема станции управления электрокалориферной установкой СФОА
Средства местного обогрева (обогреваемые полы, коврики, установки с инфракрасными и ультрафиолетовыми излучателями) используют в тех случаях, когда в одном и том же помещении содержатся животные, требующие разных температурных режимов.
На рисунке 4 представлена принципиальная электрическая схема автоматического управления нагревом электрических ковриков (ЭК).
В качестве коммутирующего органа использованы тиристоры VS1 и VS2, включенные по встречно-параллельной схеме. Терморезистор RK в схеме измерительного моста регистрирует отклонение температуры коврика от заданной резистором R6.
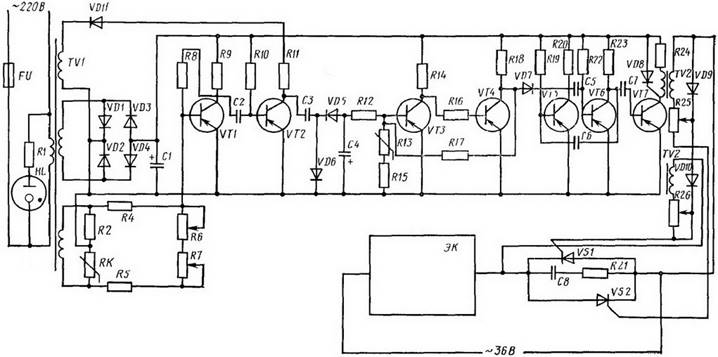
Рисунок 4 – Принципиальная электрическая схема управления нагревом электроковриков
Сигнал подаётся на двухкаскадный усилитель, выполненный на транзисторах VT1 и VT2, в котором второй каскад выполняет функцию фазочувствительного усилителя. Затем через промежуточный усилитель на транзисторах VT3 и VT4 сигнал поступает через диод VD7 на мультивибратор, собранный на транзисторах VT5 и VT6. Далее сигнал в виде импульсов частотой около 2 кГц усиливается транзистором VT7 и через трансформатор TV2 управляет тиристорами. Один бесконтактный регулятор может обеспечить регулирование температуры 8...10 ковриков.
УРОК №17. СИСТЕМЫ АВТОМАТИЗАЦИИ КОРМОРАЗДАТОЧНЫХ ПОТОЧНО-ТРАНСПОРТНЫХ ЛИНИЙ.
Поточно-транспортная линия (ПТЛ) – комплекс механизмов и сооружений, предназначенных для переработки, транспортировки и складирования материалов в едином технологическом процессе. Часть ПТЛ, которая имеет самостоятельные функции и которую независимо от других участков системы можно включить и выключить без нарушения всего технологического процесса, является участком. Границами участка обычно служат ёмкости. Независимые друг от друга направления движения материала в пределах участка представляют собой тракты. На участке может быть несколько первых и несколько последних по пуску механизмов. В схемах управления ПТЛ различают избираемые и неизбираемые механизмы. Избираемые механизмы могут быть запущены лишь после выполнения оператором специальной операции набора, неизбираемые механизмы пускаются в соответствии с блокировочными зависимостями при пуске участка или тракта.
Важным условием нормального выполнения технологического процесса является возможность дистанционного автоматизированного управления ПТЛ с дистанционным контролем за работой механизмов. При дистанционном автоматизированном управлении имеет место ручной ввод команды оператором (избирание, пуск, остановка) с последующей автоматической отработкой системой заданной программы. Это позволяет исключить возможность завалов вследствие ошибок при пуске и остановке оборудования, способствует повышению производительности и улучшению условий труда, снижает продолжительность пуска, повышает безопасность работы, улучшает качество продукции за счёт более строгого соблюдения технологии и лучшего усреднения материала. Кроме дистанционного автоматизированного управления применяются местное несблокированное и местное сблокированное управления механизмами.
При местном несблокированном управлении пуск и остановка каждого механизма осуществляются с места установки его пускового аппарата при отсутствии блокировок с другими механизмами. Этот режим является ремонтным. При местном сблокированном управлении пуск и остановка каждого механизма также осуществляются с места установки его пускового аппарата, однако последовательность запуска задается блокировочными связями в соответствии с требованиями технологии. Этот режим применяется во время наладки. Централизованное управление механизмами одного или нескольких участков осуществляется из операторского пункта, который располагается, как правило, в специальном помещении. На операторском пункте размещаются аппаратура управления, сигнализации, связи, контрольно-измерительные приборы и аппаратура автоматического регулирования технологических процессов. Из диспетчерского пункта осуществляется контроль за всем технологическим процессом и за работой основных механизмов.
Система централизованного сблокированного управления должна обеспечить:
– блокировку механизмов, определяемую условиями технологического процесса;
– предварительный набор маршрута диспетчером с проверкой правильности набора на мнемосхеме;
– невозможность запуска механизмов в том случае, если положение шиберов, затворов, задвижек и клапанов не соответствует выбранному направлению потока;
– последовательный пуск механизмов в направлении, противоположном потоку перерабатываемого материала;
– возможность дополнительного запуска и остановки отдельных групп механизмов без остановки всего потока;
– возможность запрета централизованного пуска с любого местного поста управления;
– остановку потока с диспетчерского пункта с отключением в первую очередь головного механизма, подающего материал в процесс, и остановкой остальных механизмов после выработки из них материала;
– возможность остановки механизмов с местного поста управления с остановкой всех механизмов, связанных блокировкой с остановленным, кроме механизмов, которые не могут быть запущены под завалом, и вентиляционных систем;
– дистанционное или автоматическое отключение любого механизма и всех механизмов, связанных с ним блокировкой, при нарушении режима его работы;
– возможность аварийного (мгновенного) отключения любого механизма с диспетчерского пункта или с поста местного управления;
– возможность перевода технологического потока с диспетчерского на местное управление и наоборот;
– загрузку бункеров по заданной программе; включение аспирационных установок перед запуском технологического оборудования и их отключение после остановки механизмов;
– остановку головного механизма, подающего материал в процесс, при остановке какого-либо вентилятора (или подачу аварийного сигнала).
При автоматизированном управлении должен быть обеспечен надёжный контроль за работой всех механизмов, входящих в ПТЛ. Это достигается с помощью целого ряда аппаратов и устройств, устанавливаемых на механизмах и емкостях. На конвейерах в зависимости от условий работы контролируются скорость (пробуксовка), продольный и поперечный разрывы ленты, наличие материала и сход ленты. В емкостях контролируются степень их заполнения (чаще всего верхний и нижний уровни, иногда также средний) и зависание материала. Контролируются также нагрузка главных приводов и работа систем смазки, наличие металла в материале перед, положение шиберов, затворов, задвижек, клапанов, плужковых сбрасывателей, сбрасывающих тележек, тележек передвижных конвейеров, работа аспирационных установок, систем гидрообеспыливания и другие параметры.
Датчики в схемы блокировки и сигнализации включаются либо непосредственно, либо через реле времени, которые устанавливаются, если необходимо устранить влияние неравномерной подачи материала или транспортного запаздывания. При большом числе точек контроля уровня целесообразно применять обегающее устройство, периодически подключающее необходимое число электродов к одному сигнализатору. Нередко схему измерения уровня дополняют системой сводообрушения в бункере. Неотъемлемой частью схемы управления ПТЛ является система сигнализации работы и состояния механизмов. На центральном диспетчерском пункте сигнализация осуществляется с помощью лампочек, встроенных в мнемонические знаки каждого механизма. Иногда одна лампочка предусматривается для сигнализации работы нескольких одинаковых механизмов, например вентиляторов или насосов. С помощью этих лампочек сигнализируется нормальная работа механизмов и остановка, избирание механизмов для включения или отключения, уровень материала в емкостях, авария, положение переключающих и запорных органов. Об аварийной остановке обслуживающий персонал оповещается как световым, так и звуковым сигналами. В цехах предупредительный звуковой сигнал подается перед пуском всей фабрики и перед запуском каждого тракта. Сигнал включается автоматически перед пуском первого механизма. Контроль за работой отдельных участков ПТЛ может осуществляться также с помощью промышленных телевизионных установок.
На свинофермах для раздачи кормов применяют стационарные и передвижные (мобильные) кормораздатчики. Выбор типа кормораздатчика зависит от способа кормления, зональных особенностей, условий содержания свиней, организации работ на ферме и других факторов.
В комплект современного технологического оборудования, предназначенного для раздачи кормов, входят кормораздатчики типа РКА-1000, обеспечивающие раздачу гранулированного комбикорма, который из внешнего бункера подаётся транспортёрами в приёмные бункера кормораздатчика. Из приёмного бункера корм направляется двумя цепочно-шайбовыми транспортёрами в двухсторонние лотковые кормушки или на пол.
При групповом способе содержания свиней часто используется стационарный кормораздатчик РКС-3000М, обеспечивающий равномерную раздачу сухих, сочных и полужидких (влажностью до 70%) кормов для 3000 свиней за 20 ... 30 мин.
Готовый корм поступает в бункер-дозатор (рисунок 1) с учётом разовой дачи кормов на все поголовье свиней. Отсюда корм подаётся на наклонный, а затем на горизонтальный (раздаточный) транспортёры. Раздаточный транспортёр поочередно загружает раздатчики № 1 и 2 (платформы), совершающие возвратно-поступательное движение на расстояние, равное половине длины кормушек.
Когда платформа движется влево, на нее поступает корм. Скребки, подвешенные на шарнирах, поворачиваются вверх и не мешают продвижению платформы с кормом. При обратном ходе платформы скребки опускаются, задерживают корм и сбрасывают его в кормушки. В это время кормом загружается правая половина платформы.
Система автоматического управления кормораздатчиком РКС-3000М (рисунок 1) выполнена в функциях времени, пути и уровня.
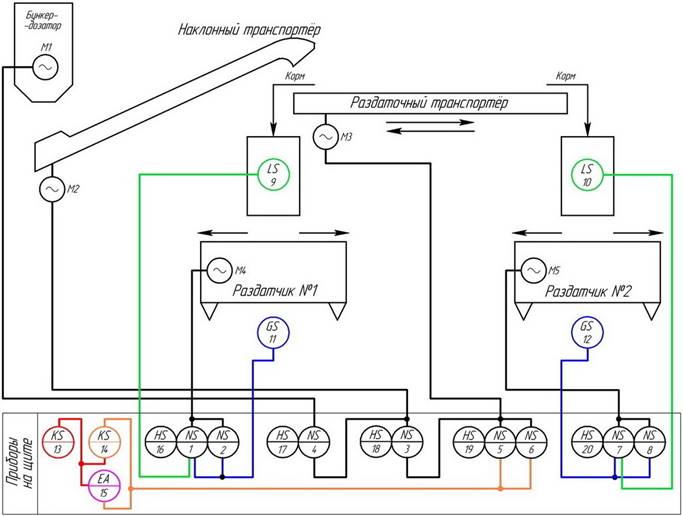
Рисунок 1 – Функциональная схема автоматизации раздатчика кормов РКС-3000М
При наступлении времени кормления программное реле 13 подаёт сигнал на реле времени 14 и предпусковую звуковую сигнализацию подачи напряжения (позиция 15). Через некоторую выдержку времени реле времени 14 отключит звуковую сигнализацию и подаст напряжение на магнитные пускатели 5 или 6 в зависимости от заданной программы раздаточного транспортёра. Затем поочерёдно запустятся электродвигатели M2 наклонного транспортёра (магнитным пускателем 3) и M1 транспортёра бункерадозатора. При поступлении корма на раздатчик срабатывает датчик уровня 9 или 10, подаётся команда магнитному пускателю 1 или 7 на запуск электродвигателя M4 или M5 раздатчика.
Раздатчик совершает движение и при достижении крайнего положения воздействует на конечный выключатель 11 или 12, после чего он начинает двигаться в обратном направлении. По окончании времени раздачи программное реле 13 отключает установку.
Принципиальная электрическая схема управления кормораздатчика РКС-3000М изображена на рисунке 2.
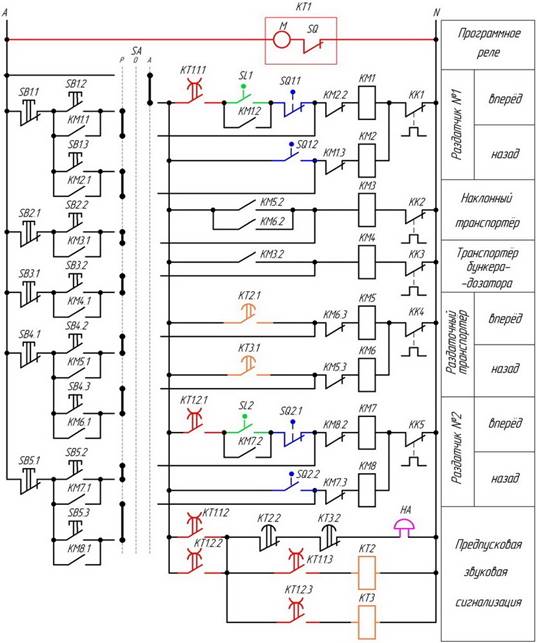
Рисунок 2 – Принципиальная электрическая схема управления кормораздатчиком РКС-3000М
Функции, выполняемые схемой:
– защита от аварийных режимов работы;
– работа в ручном и автоматических режимах;
– запуск и отключение установки по заданной программе;
– предпусковая звуковая сигнализация;
– обеспечение последовательности включения: раздаточный транспортёр – наклонный транспортёр – транспортёр бункера-дозатора;
– включение электродвигателей приводов раздатчиков №1 и №2 при их заполнении кормом;
– реверс движения раздатчиков при достижении крайних положений;
– защита от двухфазных коротких замыканий при случайной подаче команды на реверс электродвигателей.
Режим работы схемы задаётся переключателем SA. Для работы в режиме ручного управления этот переключатель ставится в положение «Р». В этом случае управление производится при помощи кнопок SB1…SB5.
В режиме автоматического управления (переключатель SA в положении «А») кормораздатчик вступает в работу по сигналу программного реле времени KT1. В заданное время включается его контакт в цепи реле времени KT2, которое через выдержку времени, необходимую для работы предпусковой звуковой сигнализации, замкнёт свой контакт в цепи катушки магнитного пускателя KM5, включающего раздаточный транспортёр. Магнитный пускатель KM5 подаёт питание на катушку магнитного пускателя KM3, что приводит к пуску наклонного транспортёра, а затем – посредством пускателя KM4 и бункерадозатора. Когда корм начнёт поступать, замкнётся контакт датчика уровней SL1, который включит через пускатель KM1 платформу первого раздатчика. Как только платформа заполнится кормом и займет крайнее положение, конечный выключатель SQ1 реверсирует привод платформы, в результате чего корм сбрасывается в первую секцию кормушек. Одновременно платформа заполняется кормом для второй секции кормушек. В крайнем положении платформы конечный выключатель SQ1 опять переключится, и корм заполнит вторую секцию кормушек.
Таким же способом программное реле KT1 управляет вторым кормораздатчиком.
Полнорационное кормление – основное условие реализации генетического потенциала продуктивности стада, увеличения сроков его хозяйственного использования, а также снижения затрат и удешевления продукции.
Существует два основных способа кормления крупного рогатого скота (КРС) – нормированный и ненормированный. Первый из них применяют при привязном содержании животных, второй – при беспривязном содержании. При ненормированном способе обычно скармливают грубые корма.
Затраты труда на погрузку, транспортирование и раздачу кормов на фермах КРС, несмотря на достаточно высокий уровень механизации, достигают 25 % общих затрат. Система машин, действующая на этих фермах, рассчитана на использование кормовых смесей трех основных видов: сухих гранулированных и брикетированных; полувлажных при сенажном кормлении; влажных при силосно-корнеплодном и сенажно-силосном кормлении.
Технологии механизированной раздачи кормов на фермах и комплексах разнообразны. Выбор той или иной из них зависит от размеров фермы, технологии содержания скота, рациона кормления и других факторов, но в любом случае механизированная раздача кормов должна быть простой, надежной и универсальной с точки зрения реализации кормов с различными физико-механическими свойствами, а также обеспечивать нормированную раздачу кормов при минимальных затратах времени (до 30 мин).
Способ кормления определяет перечень операций и тип механизмов, в них участвующих. Так, при ненормированном кормлении основные операции – доставка корма и выгрузка его в кормушки. При нормированном кормлении механизмы, участвующие в процессе раздачи корма, должны быть отрегулированы на точное его дозирование.
Многочисленные механизмы для раздачи кормов (кормораздатчики) классифицируют на мобильные и стационарные.
Мобильные кормораздатчики наиболее эффективны при скармливании силоса или сенажа, поскольку исключаются затраты труда на перевалочные операции. Мобильные раздатчики доставляют корма в помещение и сами же раздают их. Они приводятся в действие от двигателей внутреннего сгорания или электродвигателей. Радиус действия электромобильных раздатчиков ограничен длиной питающего кабеля или троллеев.
Среди мобильных раздатчиков представляет интерес КТУ-10А, выполненный в виде двухосного прицепа с приводом от ВОМ трактора. Этот раздатчик используют для транспортирования и раздачи грубых, зеленых и сочных кормов. Его раздающее устройство включает в себя два битера, выгружной и наклонный дополнительный (для выгрузки корма в высокие кормушки) транспортеры. Норма выдачи кормов и направление движения подающего транспортера изменяются кривошипно-шатунным механизмом. Раздатчик может быть легко переоборудован для раздачи корма на обе стороны.
При откорме скота на площадках применяют мобильные раздатчики-смесители. Они позволяют раздавать животным корм в виде смесей. Эти кормораздатчики агрегатируют с тракторами или монтируют на шасси автомобиля. Мобильная кормораздача не автоматизируется, ею управляет оператор (водитель).
При доставке корма на прицепных тележках важны измерение общей массы корма и обеспечение заданного соотношения между различными компонентами корма, загружаемыми обычно с помощью погрузчика. Массу корма можно определять силоизмерительными элементами, посредством которых корпус тележки крепят к шасси трактора (автомобиля). Все компоненты корма загружают последовательно до получения светового сигнала о готовности дозы. Более совершенна автоматизированная система, когда масса очередного компонента корма корректируется, исходя из массы предыдущего, специальным вычислительным устройством, выдающим предупредительный сигнал при загрузке 90 % дозы очередного компонента и сигнал об окончании загрузки, когда вся доза погружена в тележку.
Стационарные раздатчики кормов (а также и транспортеры) в зависимости от типа рабочего органа делят на скребковые, ленточные и шнековые.
Скребковый раздатчик представляет собой бесконечную цепь со скребками, перемещающую корм внутри желоба. Такой раздатчик используют для транспортирования корнеклубнеплодов, силоса, грубых кормов и зерна. В зависимости от особенностей конструкции корм перемещается верхней или нижней ветвью раздатчика. Производительностью скребкового раздатчика управляют, изменяя скорость движения цепи.
Ленточный раздатчик представляет собой бесконечную ленту из прорезиненного материала, перемещающую корм горизонтально или под небольшим углом, зависящим от сыпучести корма. Производительность ленточного раздатчика регулируют, изменяя скорость движения ленты.
Шнековый раздатчик состоит из кожуха и вращающегося внутри него рабочего винта, перемещающего корм (корнеклубнеплоды, силос и т. д.). Производительность шнекового раздатчика регулируют, изменяя частоту вращения рабочего винта.
При нормированном кормлении и широком разнообразии норм выдачи, например в коровниках стойлового содержания, малоценные грубые корма в смеси с сочными могут выдаваться без ограничения кормораздатчиком ТВК-80Б, а концентрированные – другим стационарным кормораздатчиком КШ-0,5 или РКА-1000, которые обеспечивают индивидуальное дозирование.
Кормораздатчик типа ТВК-80Б представляет собой движущуюся челночно ленту 3 (рисунок 1) в кормушках 4, приводимую в действие реверсивным электроприводом 5. При движении вперед лента уносит к месту стойла животных определённое, загружаемое питателем 1 количество корма. В качестве питателя может быть использован кормораздатчик КТУ-10, который имеет накопительную ёмкость 2. С возвратом ленты (реверс) кормушки самоочищаются от остатков корма, который удаляется из помещения транспортёром 6.
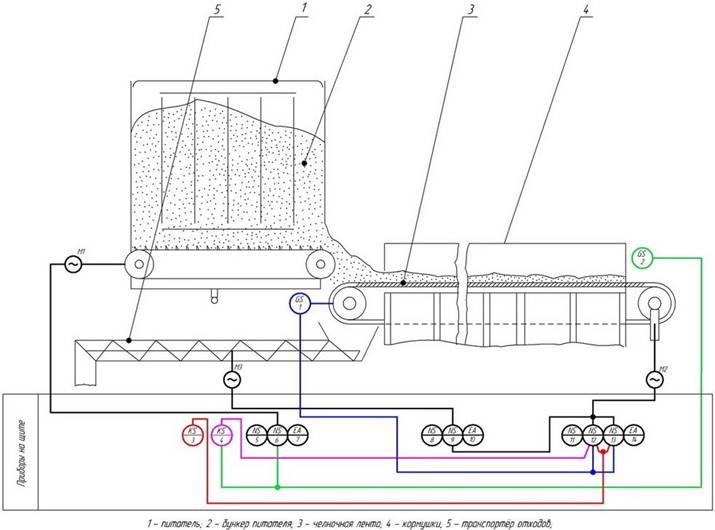
Рисунок 1 – Функциональная схема автоматизации раздатчика кормов ТВК-80Б
Таким образом, ТВК-80Б способен транспортировать корма к месту потребления и убирать их отходы, то есть выполнять наиболее трудоемкие технологические операции. Но нормированное кормление на ТВК-80Б осуществить невозможно, поскольку корм при движении ленты самопроизвольно разравнивается. Кроме того, при движении ленты животные выборочно поедают корм.
Система автоматизации обеспечивает раздачу корма КРС в заданное время, а также управляет движением транспортеров-раздатчиков. Раздачу кормов в течение суток производят согласно расчетной диаграмме кормления.
При наступлении времени кормления программное реле KS3 даёт команду магнитному пускателю NS6 на включение двигателя бункера питателя М1 и NS12 на включение электродвигателя М2 привода челночной ленты в прямом направлении, происходит подача корма в кормушки. Когда столб корма почти дойдёт до конца кормушки, сработает конечный выключатель GS2, который воздействует на магнитный пускатель NS6 для мгновенного отключения электродвигателя М1, и на реле времени KS4, которое с выдержкой времени необходимо для того, чтобы столб корма дошёл до конца кормушки, после чего отключит электродвигатель М2 челночной ленты.
По окончанию процесса кормления программное реле KS3 даст команду магнитному пускателю NS13 на включение электродвигателя М2 челночной ленты в обратном направлении. Этот магнитный пускатель позволит магнитному пускателю NS9 запустить электродвигатель М3 транспортёра отходов. Происходит процесс удаления остатков корма из кормушек до тех пор, пока не сработает конечный выключатель GS1, который отключит магнитный пускатель NS12, а тот в свою очередь NS9.
На функциональной схеме также приведены устройства EA7, EA10, EA14, сигнализирующие о работе различных механизмов линии.
Принципиальная электрическая схема управления кормораздатчиком ТВК-80Б выполняет следующие функции:
– запуск электродвигателей привода питателя и челночной ленты в прямом направлении по заданной программе;
– отключение челночной ленты в прямом направлении при подходе столба корма к концу кормушки, обеспечение выдержки времени необходимого для полного заполнения кормушки;
– запуск электродвигателей привода челночной ленты в обратном направлении и привода транспортёра отходов по заданной программе по окончанию кормления;
– блокировка включения электродвигателя транспортёра отходов при отключенном электродвигателе челночной ленты в обратном направлении;
– блокировка включения челночной ленты в обратном направлении при её движении в прямом направлении во избежание короткого замыкания.
Для раздачи кормов в течение суток используют суточное программное реле KТ2, которое настраивают согласно расчётной диаграмме кормления. Кормораздаточной линией, согласно принципиальной электрической схеме (рисунок 2), управляют вручную или автоматически в следующем порядке.
SA задаёт режим работы. Для работы схемы в ручном режиме переключатель SA ставят в положение «Р». В этом случае управление электродвигателями производится кнопками SB2,…,SB5. Кнопкой SB1 двигатели останавливаются в случае аварии.
Для работы в автоматическом режиме переключатель SA1 ставят в положение «А». Кормораздаточной линией управляют вручную или автоматически в следующем порядке. В начале контактом программного устройства KТ2:1 включаются магнитные пускатели KМ2 и KМ3 возврата ленты и транспортёра отходов. В конечном переднем положении ленты кормораздатчика концевой выключатель SQ1 останавливает её движение и отключает транспортёр отходов через контакт KМ2:2. По команде программного реле контактами KТ2:2 включается привод питателя KМ4 и привод раздачи корма KМ1. В конце раздачи концевой выключатель SQ2 отключает KМ4 привод питателя сразу, а KМ1 – подачи ленты, с выдержкой времени, обеспечиваемой реле времени KТ1.
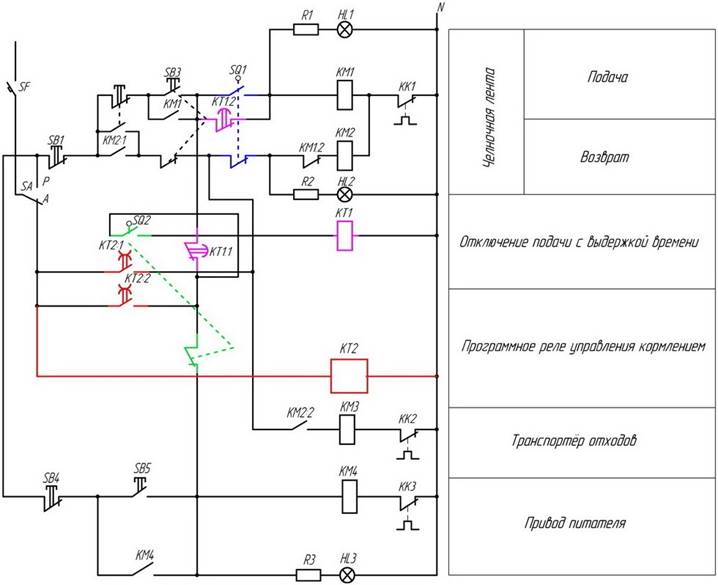
Рисунок 2 – Принципиальная электрическая схема управления раздатчиком кормов ТВК-80Б
Для поения животных используют индивидуальные и групповые поилки. Одной индивидуальной поилки достаточно для 9...15 животных. Групповая поилка для наружной установки оборудована системой электроподогрева (мощностью до 1 кВт) и предназначена для обслуживания до 200 животных. Такая поилка работает по принципу сообщающихся сосудов. Поплавковый регулятор уровня 1 (рисунок 3) поддерживает заданный уровень воды в чашах 4 поилок. При опорожнении одной из поилок вода в неё из соседней не переливается благодаря клапану 3. Этим уменьшается опасность передачи инфекции от одного животного к другому.
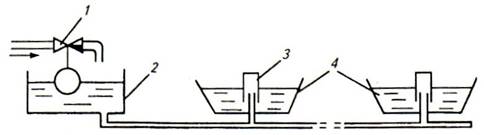
1 – регулятор уровня; 2 – напорный бачок; 3 – клапан; 4 – чаши поилок Рисунок 3 – Поилка для КРС:
Основные операции ТП уборки и удаления навоза из животноводческих помещений ферм и комплексов – уборка в стойлах, транспортирование навоза к местам хранения или переработки, хранение или утилизация. В этом перечне наиболее высоким уровнем механизации и автоматизации характеризуется первая операция – уборка навоза из производственных помещений.
Уборка навоза. Выбор способа уборки навоза зависит от многих обстоятельств и в первую очередь от способов содержания и кормления животных, суточного выхода навоза, его физико-механических свойств, конструктивных характеристик помещения, климатических, гидрогеологических и других условий.
Классификация средств навозоудаления:
Мобильные механизмы применяют не только для удаления навоза, но и для транспортирования его в навозохранилище или на открытую навозную площадку. В эту группу механизмов входят скреперы, бульдозеры, прицепные тракторные тележки и электрифицированные монорельсовые вагонетки.
Специальные системы управления имеют только вагонетки, но и их объем автоматизации ограничивается конечными выключателями, отключающими электродвигатель в крайних положениях вагонетки.
Стационарные механизмы используют, как правило, в качестве рабочего органа бесконечную металлическую цепь со скребками или скрепер.
Транспортирование навоза осуществляется либо подвижными транспортными средствами, либо по подъемному трубопроводу под действием переметаемого давлением воды поршня, периодически выталкивающего навоз, сбрасываемый транспортёром в приёмную воронку поворотного клапана. Последний отделяет эту воронку от трубопровода перед началом движения поршня.
Утилизация навоза особо важна на свиноводческих комплексах. Выход жидкого навоза на комплексе размером 180тыс. свиней в год составляет 1 млн т, что соответствует хозяйственно-бытовым стокам города с населением 250 тыс. человек и представляет собой большую экологическую проблему.
Обработка жидкого навоза включает в себя операции разделения на фракции, обеззараживания, гомогенизации и транспортирования. Технология до конца не отработана, и потому операции по управлению не автоматизированы. Предложено из навоза производить биогаз по следующей технологии. Навоз из животноводческих помещений собирается в коллектор, откуда насосом перекачивается в подогреватель для нагрева до температуры брожения. Далее выдержанный навоз винтовым насосом-дозатором подается в ёмкости-реакторы, где идет анаэробное брожение, результатом которого является биогаз. Биогаз перекачивается в газгольдер, очищается и через гидрозатвор поступает к потребителю или в хранилище.
Электротехническая промышленность выпускает комплектные устройства управления типа ЯАА, предназначенные для автоматического управления электродвигателями навозоуборочных транспортёров и их защиты.
Скребковый транспортёр кругового движения ТСН-160 (рисунок 1) предназначен для механизации уборки навоза из животноводческого помещения (горизонтальный транспортёр) и одновременной погрузки его в транспортное средство (наклонный транспортёр). Для управления установкой ТСН-160 используется комплектное устройство ЯАА5910 (рисунок 2). Дистанционное управление электродвигателями транспортера осуществляется при помощи кнопочных постов SB1... SB4. При нажатии кнопки SB3 подаётся питание на катушку пускателя KМ1, который включает двигатель наклонного транспортера, подготавливает цепь пускателя KМ2 к включению на длительную работу и подает питание на устройство защиты А (УВТЗ-1М). Кнопкой SB2 подаётся питание на катушку магнитного пускателя KМ2, который включает электродвигатель горизонтального транспортёра.
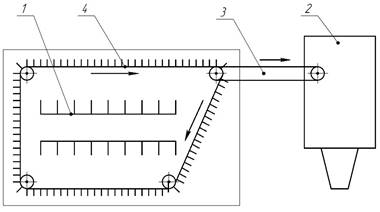
Рисунок 1 – Технологическая схема навозоуборочного транспортёра ТСН-160
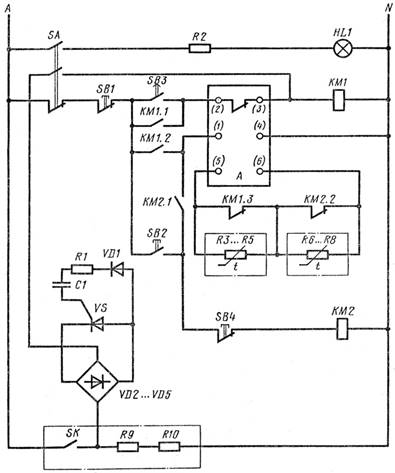
Рисунок 2 – Принципиальная электрическая схема управления навозоуборочным транспортёром ТСН-160
В схеме предусмотрено включение на зимний период блока защиты УЗП-1 от примерзания скребков наклонного транспортёра. Блок подключается при помощи переключателя SA, о чём сигнализирует лампа HL1. В этом случае, если температура воздуха выше нормы, контакт датчика температуры SK замкнут, следовательно, с выпрямительного моста сигнал подаётся через диод VD1, резистор R1, конденсатор C1 на управляющий электрод тиристора VS, который открывается. Катушка магнитного пускателя KМ1 получает питание, включается двигатель наклонного транспортёра.
Когда температура воздуха ниже нормы, контакт датчика температуры SK разомкнут, тиристор VS закрыт, следовательно, включение наклонного транспортера невозможно. Для обеспечения включения наклонного транспортера его надо тщательно осмотреть, освободить от возможного примерзания и намерзания.
Технологические линии навозоудаления на крупных животноводческих фермах и комплексах промышленного типа – сложные разветвлённые поточно-транспортные системы с механизмами циклического действия. По функциональному назначению эти механизмы подразделяются на три группы: 1 – продольные, убирающие навоз из зон расположения животных; 2 – поперечные, транспортирующие его из помещения; 3 – механизмы, предназначенные для погрузки навоза в мобильные транспортные средства или перекачки в хранилище.
Такие линии при привязном содержании скота включают горизонтальные скребковые транспортеры установок ТСН-160а или ТСН-ЗБ, КНП-10 и УТН-10 (рисунок 3, а); при боксовом содержании – УС-15, КНП-10 и УТН-10 (рисунок 3, б).
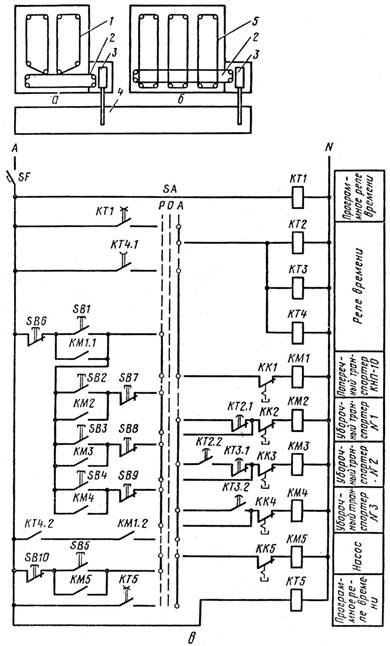
1 – скребковый транспортёр ТСН-160А; 2 – навозоуборочный конвейер КНП-10;
3 – поршневой насос УТН-10; 4 – навозохранилище; 5 – скреперная установка УС-15
Рисунок 3 – Поточная линия уборки навоза: а – при привязном содержании;
б – при боксовом содержании; в – принципиальная электрическая схема автоматизированного
управления поточной линией уборки навоза
В соответствии с технологической схемой (рисунок 3, б) приведена принципиальная электрическая схема автоматизации поточной линии (рисунок 3, в).
В заданное время программное реле времени КТ1 замыкает свои контакты и включает реле времени KТ2, KТЗ, KТ4, а реле времени KТ4 своими контактами включает магнитные пускатели KМ1 поперечного транспортёра и KМ2 первого уборочного транспортёра. Через время ∆t1, достаточное для уборки навоза первым уборочным транспорёром, срабатывает реле времени KТ2, которое своими контактами отключает магнитный пускатель KМ2 первого уборочного транспортёра и включает магнитный пускатель КМ3 второго уборочного транспортёра. После окончания уборки навоза вторым уборочным транспортером реле времени KТ3 с выдержкой времени ∆t2 = 2∆t1 отключает второй уборочный транспортёр и включает третий. Через время ∆t3 = 3∆t1 программное реле времени KТ1 размыкает свои контакты и отключает все три реле времени и навозоуборочные транспортёры.
Через время ∆t4, достаточное для освобождения от навоза поперечного транспортёра, перемещающего навоз от навозоуборочных транспортёров в навозохранилище, он отключается при помощи реле времени KТ4.
Поршневой насос по перекачке навоза из навозосборника в навозохранилище включается и отключается при помощи своего программного реле времени KТ5.
Для технологической схемы, приведенной на рисунке 3, а, электрическая схема упрощается. Из неё нужно исключить магнитный пускатель KМ4 третьего уборочного транспортёра и реле времени KТЗ. В представленной электрической схеме предусмотрена раздельная работа уборочных транспортеров на общий поперечный транспортёр. Если же подача поперечного транспортера равна суммарной подаче двух (рисунок 3, а) или трёх (рисунок 3, б) уборочных транспортёров или больше неё, то их можно включать и отключать одновременно. Для этой цели из электрической схемы надо исключить реле времени KТ2 и KТ3.
|
|
Видеоматериалы к занятию |
Машинное доение повышает производительность труда в 2...5 раз, но предъявляет особо жесткие требования к соблюдению технологического режима. Так, при пониженном вакууме коровы не успевают выдоиться, а при повышенном увеличивается опасность заболевания маститом; при большом разрыве между подмыванием вымени и началом доения уменьшается полнота выдаивания и т. д.
Следует иметь в виду, что молокоотдача животного неравномерна, при этом задержка с отключением вакуума и снятием стаканов также увеличивает вероятность заболевания маститом.
Особенность автоматизации доильных установок зависит от их назначения:
– для доения в стойлах (АДМ-8А, АД-100Б, ДАС-2В);
– для доения в специальных залах (УДТ-8, УДА-8А, УДЕ-8А, УДА-16А).
Доильный агрегат с молокопроводом АДМ-8А обеспечивает кроме, собственно, выдаивания животных транспортирование молока в молочное отделение, индивидуальный и групповой учёт удоя 50 животных, фильтрацию, а также охлаждение и сбор молока в емкости для хранения.
Конструкция установки АДМ-8А предусматривает автоматические регулирование вакуума, измерение (дозирование) удоя, промывку и дезинфекцию молочной линии по окончании доения. Рассмотрим конструкцию и принцип действия этих автоматических устройств.
Автоматический регулятор вакуума АДМ-08.000. Он представляет собой регулятор прямого действия, настраиваемый на разрежение 45 кПа.
При включении вакуум-насоса перепад давления, действующий на клапан 1 (рисунок 1, а), уравновешивается набором грузов 8, подвешенных на пружине 4. При изменении давления в вакуум-проводе 2 клапан 1 опускается или поднимается, уменьшая или увеличивая подсос атмосферного воздуха из-за изменения площади сечения между корпусом и пробкой клапана. Через прозрачный колпак 5 регулятора по положению грузов можно оценить запас производительности вакуум-насоса. Для гашения колебаний регулирующего органа служат две демпфирующие шайбы, соединенные с грузом и погруженные в слой масла таким образом, чтобы между ним и грузом оставался зазор 8...12 мм.
Плотность воздушной системы можно оценить по количеству инжектируемого воздуха, измеряемому флажковым индикатором 3. Прозрачный корпус индикатора имеет три метки, соответствующие потоку воздуха 5, 10 и 15 м3/ч. Во время доения флажок регулятора у вакуум-насоса должен быть ниже третьей метки, а флажок главного регулятора установки – на первой, что соответствует подсосу воздуха в количестве 4...7 м3/ч.
В общем случае вакуум поддерживается более стабильным, если такты сосания и сжатия всех четырех сосков не совпадают или хотя бы объединены попарно.
Очень перспективно программное управление величиной вакуума, частотой пульсации и соотношением тактов пульсаций в процессе доения. Например, в начале и конце доения устанавливают вакуум 35 кПа и частоту пульсаций 48 мин-1, а в основное время – 50 кПа и 60 мин-1.
Автоматический дозатор молока АДМ-52.000. Он рассчитан на измерение удоя группы коров, закрепленных за одним дояром. Работу дозатора рассмотрим в двух режимах:
1. Наполнение мерной камеры. Молоко поступает в мерную камеру 8 (рисунок 1, б) через прозрачный молокоприемник 4 и шайбу 6. По мере наполнения камеры 8 поплавок 5 всплывает и отсекает мерную камеру 8 от молокоприемника. При этом отверстие 3 сообщает внутреннюю полость трубки 10 с атмосферой, а сильфон 2 под давлением атмосферного воздуха переключает счётчик 1.
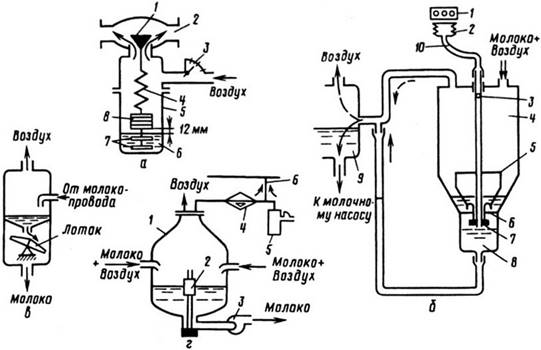 а –
регулятор вакуума: 1 – клапан; 2 –
вакуум-провод; 3 – индикатор количества инжектируемого
а –
регулятор вакуума: 1 – клапан; 2 –
вакуум-провод; 3 – индикатор количества инжектируемого
воздуха; 4 – пружина; 5 – прозрачный колпак; 6 – масло; 7 – демпфирующие шайбы; 8 – груз; б – автоматический дозатор молока: 1 – счётчик; 2 – сильфон; 3 – отверстие; 4 и 9 – молокоприёмники; 5 – поплавок; 6 – шайба; 7– клапан; 8 – мерная камера; 10 – трубка; в – групповой счётчик молока;
г – автоматическое управление молочным насосом: 1 – молокоприемник; 2 – поплавок; 3 – молочный насос; 4 – предохранительная камера; 5 – регулятор вакуума; 6 – вакуум-провод Рисунок 1 – Аппаратура автоматизации доильных установок
2. Опорожнение мерной камеры. Под давлением атмосферного воздуха молоко из мерной камеры 8 вытесняется в молокосборник. По мере опускания поплавка отверстие 3 разобщается с атмосферой, вакуум в молокосборнике восстанавливается и начинается новый цикл заполнения мерной камеры.
Точность работы дозатора регулируется длиной петли молочного шланга, соединяющего мерную камеру дозатора с молокосборником, поскольку в килограммовую дозу молока входит также молоко, заполняющее молочный шланг. Если в конце доения сумматоры показывают меньшее количество молока, чем было реально получено, то длину петли молочного шланга уменьшают, и наоборот.
Групповой счетчик молока. Он действует по аналогичному принципу, заключающемуся в попеременном заполнении молоком качающегося лотка при его повороте вокруг своей оси (рисунок 1, в). Каждый двойной ход рычажного устройства отмечается срабатыванием магнитоуправляемого контакта счетного прибора, измеряющего удой.
Более точные результаты, не зависящие от температуры молока, дают устройства для взвешивания молокосборников.
В качестве силоизмерительного органа используют тензометрическую балку. Отсчет дозы начинается спустя 2 мин с начала доения и продолжается до момента, пока расход не снизится до заданного уровня (0,2 кг/мин).
Молочно-воздушная смесь из обеих ветвей молокопровода поступает в воздухоразделитель (молокоприёмник), представляющий собой стеклянную ёмкость 7 (рисунок 1, г) на 50 л, соединенную с предохранительной камерой 4 и вакуумным регулятором 5. Предохранительная камера 4 предотвращает попадание молока в вакуум-провод 6 при отказе молочного насоса 3.
По мере заполнения сосуда молокоприемника всплывает поплавок 2, в который вмонтирован постоянный магнит, управляющий несколькими герконами, установленными на высоте, соответствующей дозе 5, 10 и 15 л. При наборе соответствующей дозы молока контакты геркона замыкаются, и включается молочный насос 3.
Автомат промывки. Он обеспечивает выполнение целого ряда операций, в том числе прополаскивание молокопроводящих путей холодной водой перед доением, циркуляционную промывку и дезинфекцию этих путей по окончании доения, прополаскивание молокопроводящих путей теплой водой в конце цикла промывки, просушку молокопроводящих путей тёплым воздухом после удаления остатков моющих растворов, кратковременное включение молочного насоса в конце просушки для удаления остатков воды из молокосборника и, наконец, отключение вакуум-насоса и командного аппарата.
Автоматизированные установки для доения коров. Установки для доения коров в молочных блоках типа «Тандем» (УДА-8А) и «Ёлочка» (УДА-16А) в целом унифицированы между собой, но отличаются конструкцией станков.
Установки «Тандем» комплектуют индивидуальными доильными станками, а установки «Ёлочка» – групповыми станками, что позволяет выпускать коров после выдаивания группой и выдавать концентрированные корма одинаковыми порциями. Это рационально лишь при специально подобранном по продуктивности стаде.
Манипулятор МД-Ф-1. Он облегчает операции по надеванию доильных стаканов, обеспечивает контроль за интенсивностью доения, автоматическое додаивание, отключение аппарата от вакуумной линии, снятие доильных стаканов с сосков вымени и вывод доильного аппарата из-под коровы.
Основной функциональный узел автомата управления 7 (рисунок 2) – пневмодатчик. В исходном положении головка 14 упирается в скобу 6 и молоко поступает в камеру датчика, откуда выливается через калиброванное отверстие 11 в молокопровод. При нарастании потока молока поплавок 12 всплывает и освобождает скобу 6, которая под действием собственной массы откидывается вправо. С этого момента начинается автоматический контроль за процессом доения. Основная часть молока вытекает через обводной канал в молокопровод; причём при уменьшении интенсивности потока до 400 г/мин молоко успевает вытечь через калиброванное отверстие 11, поплавок и укрепленная на нем головка опускаются вниз, открывая отверстие канала штуцера I (рисунок 3) головки цилиндра 2 (рисунок 2) додоя, который через рычаг манипулятора оттягивает стаканы вниз, обеспечивая механическое додаивание. При снижении потока до 200 г/мин поплавок опускается еще ниже, клапан 13 отключает доильные стаканы от вакуума (молокопровода), штуцер I (рисунок 3) сообщается с атмосферой, а штуцер I головки подключает вакуум к пневмоцилиндрам манипулятора, доильные стаканы снимаются и выводятся из-под коровы. Устанавливают манипулятор на вертикальной стойке станка или специально монтируемой опоре.
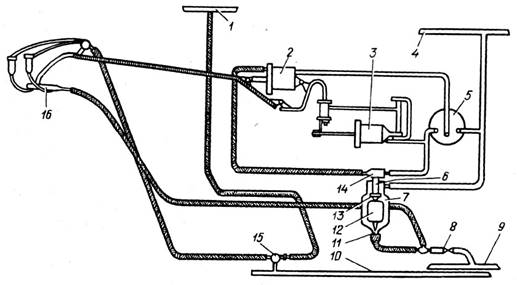
1 – воздуховод чистого воздуха; 2 – цилиндр додоя; 3 – цилиндр вывода доильного аппарата из-под коровы; 4 – силовой вакуум-провод; 5 – кран; 6 – скоба; 7 – автомат управления; 8 – зажим;
9 – молокопровод; 10 – технологический вакуум-провод; 11 – калиброванное отверстие; 12 – поплавок;
13 – клапан; 14 – головка; 15 – пульсатор; 16 – доильный аппарат
Рисунок 4 – Схема управления доильным аппаратом с манипулятором МД-Ф-1
На рисунке 3 пневмодатчик изображен в четырех положениях: исходном (а), когда головка упирается в скобу; в начале контроля за доением (б), когда интенсивность молокоотдачи максимальна; в режиме додаивания (в); в момент окончания доения и снятия доильных стаканов (г).
Кран 5 (рисунок 2) служит для принудительного подъёма и поддержания доильных стаканов при их надевании на соски.
Заданный вакуум в доильных аппаратах и всей системе доильной установки поддерживается вакуумными регуляторами прямого действия, устройство которых было рассмотрено ранее.
Мировой уровень механизации технологических процессов в животноводстве достиг полной автоматизации процесса доения. Главное при этом – автоматическое надевание доильных стаканов. Сегодня существует несколько конструкций роботов, выполняющих эту операцию. Механическая рука подводит аппарат под животное, а затем поочередно надевает стакан за стаканом. Положение сосков каждого животного находится в памяти доильного робота, а точная «наводка» стаканов обеспечивается прецизионными ультразвуковыми или оптическими датчиками. Один такой робот обслуживает до 40 животных.
Полная автоматизация процесса доения дает возможность перейти к четырехразовому доению, что на 10...20 % увеличивает удой.
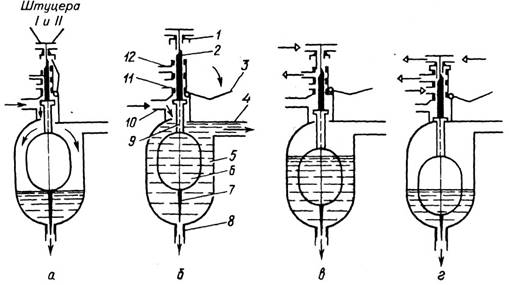
1 – головка пневмодатчика; 2 – плунжер; 3 – скоба; 4 – штуцер переливной; 5 – корпус; 6 – поплавок;
7 – игла; 8 – отверстие слива молока; 9 – клапан; 10 – штуцер входа молока; 11 – воздушное отверстие; 12 – штуцер постоянного вакуума
Рисунок 3 – Схема работы пневмодатчика манипулятора:
а – исходное положение; б – начало контроля за доением; в – додаивание; г – снятие доильного аппарата
Сегодня обычный метод обнаружения заболевания коровы маститом – контроль появления сгустков в молоке. Этот способ надежен, но диагностика заболевания затягивается, и лечение животного может оказаться неэффективным. Обнаружено, что температура молока, выдоенного из инфицированного вымени, увеличивается на 2 °С. Еще более перспективна диагностика заболевания по электрической проводимости молока, а еще лучше – по концентрации ионов Na и Сl. Контроль заболевания маститом можно проводить сравнением температуры молока в каждой четверти вымени, чтобы избежать ошибки в результате повышения температуры молока, вызванной другими причинами.
Таким образом, современный уровень механизации и автоматизации делает возможным выполнение АСУ доением. При работе системы каждое животное идентифицируется, взвешивается, измеряется его удой, дозируются концентраты и на дисплей выводится информация оператору: проверить наличие мастита, провести лечебные процедуры, слить инфицированное молоко и т. д.
|
|
Видеоматериалы к занятию |
Процесс первичной обработки молока включает в себя операции его очистки, пастеризации при
62...90 °С, охлаждения до 5...10 °С.
Цель пастеризации – уничтожение содержащихся в молоке микроорганизмов. Последующее за пастеризацией охлаждение позволяет увеличить срок хранения продукта. Охлаждение применяют и как самостоятельную операцию при хранении молока на молочных фермах и комплексах.
Пастеризатор молока представляет собой многосекционный пластинчатый теплообменник, подогреваемый горячей водой, приготовляемой в специальном контуре, включающем в себя бойлер 9 (рисунок1), инжектор 8 и насос 10.
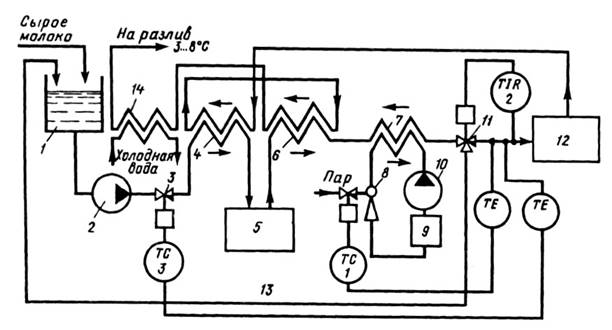
1 – уравнительный бак; 2 – молочный насос; 3 – регулирующий клапан; 4 и 6 – первая и вторая секции регенерации; 5 – центробежный молокоочиститель; 7 – секция пастеризации; 8 – инжектор; 9 – бойлер; 10 – насос горячей воды; 11 – перепускной клапан; 12 – выдерживатель; 13 – линия возврата недопастеризованного молока; 14 – секция охлаждения
Рисунок 1 – Функциональная схема автоматизации пастеризационной установки
На практике используют разные режимы пастеризации: мгновенный (при 85...90 °С), кратковременный (20 с при 72...76 °С) и длительный (300 с при 90 °С) для стерилизации молока от больных коров.
В процессе пастеризации молоко проходит последовательно первую секцию 4 регенерации, молокоочиститель 5, вторую секцию 6 регенерации, секцию 7 пастеризации, выдерживатель 12, снова первую и вторую секции регенерации и, наконец, секцию 14 охлаждения.
Греющий агент – пар, нагревающий в бойлере воду, используемую затем в секции пастеризации.
Режим пастеризации поддерживается ПИ-регулятором (позиция 1), управляющим потоком пара к бойлеру. При понижении температуры пастеризации ниже установленного уровня (например, из-за снижения давления греющего пара) по команде регулятора-ограничителя (измерительный прибор с регулирующим устройством, позиция 2) открывается клапан 11, по линии 13 возвращающий молоко в уравнительный бак на повторную пастеризацию. Для исключения таких режимов работы может быть использована схема пропорционального уменьшения расхода молока при снижении температуры пастеризации tп. Эту функцию выполняет П-регулятор (позиция 3), управляющий регулирующим клапаном 3 на линии молочного насоса 2.
Работа установки при пониженных температурах пастеризации расширяет диапазон возможных режимов эксплуатации пастеризатора и снижает скорость образования «пригара» – белковых отложений на поверхности пластин, требующих периодической разборки и очистки пастеризатора.
Установка работает по замкнутому циклу. Пары хладагента (фреон R12) поступают в компрессор 1 (рисунок 2, а), сжимаются и попадают в конденсатор 10, где превращаются в жидкость, стекающую в ресивер 9. Из ресивера жидкий хладагент поступает в испаритель 12, проходя последовательно через теплообменник 6, фильтр-осушитель 7 и терморегулирующий вентиль 8.
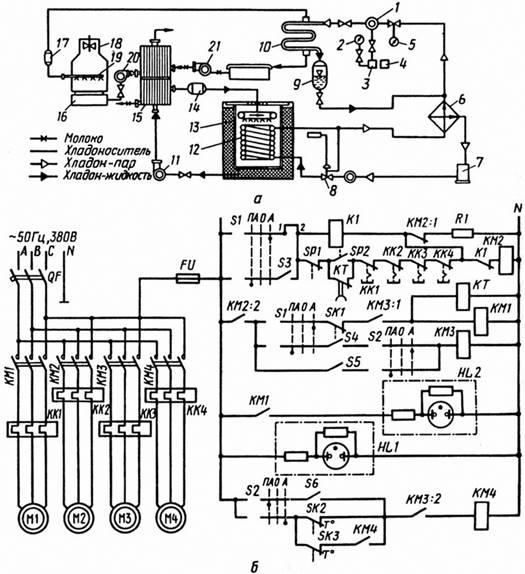
1 – компрессор; 2 и 5 – манометры; 3 и 4 – реле давления и контроля смазки; 6 – теплообменник;
7 – фильтр-осушитель; 8 – терморегулирующий вентиль; 9 – ресивер; 10 – конденсатор;
11 и 20 – водяные насосы; 12 – испаритель; 13 – бак; 14 и 17 – фильтры; 15 – охладитель молока;
16 – градирня; 18 – вентилятор; 19 – ороситель; 21 – молочный насос
Рисунок 2 – Технологическая (а) и принципиальная электрическая (б) схемы водоохладительной установки АВ-30
В терморегулирующем вентиле давление хладагента падает, он оказывается перегретым относительно нового давления и потому вскипает, отбирая теплоту у воды, орошающей поверхность испарителя. Эта вода насосом 11 перекачивается в охладитель 15 молока, после которого возвращается в испаритель. Пары хладагента поступают в теплообменник, где охлаждают фреон и затем засасываются в цилиндр компрессора.
Для охлаждения воды, омывающей трубки конденсатора, используют малогабаритную градирню 16 с вентилятором 18.
Режим работы автоматический (А) или полуавтоматический (ПА) устанавливают переключателями S1 и S2 (рисунок 2, б). При подаче питающего напряжения последовательно включаются двигатели М2, МЗ и M1. Двигатель М4 привода вентилятора градирни включается температурным реле SK2 при повышении температуры воды на охлаждении конденсатора до 23,5 °С.
Если температура воды опускается ниже 7 °С, реле SK3 отключает вентилятор.
Реле SP2 контролирует давление в смазочной системе компрессора, и если оно при пуске машины не поднимается до требуемого уровня и контакты SP2 не замыкаются, то через 1,5 мин реле времени KT отключает установку. Реле SP1 отключает установку при аварийном повышении давления хладагента.
Срабатывание любого элемента защиты в цепи катушки пускателя KМ2 вводит в действие реле K1.
При этом катушки реле K1 и пускателя KМ2 оказываются включенными последовательно. В результате KМ2 отпускает, а реле K1 питается через резистор R1. Поэтому при последующем замыкании контактов любого из аппаратов защиты (SP1, SP2, KK1... KK4) магнитный пускатель KМ2, а следовательно, и установка в целом автоматически не включаются. Обслуживающий персонал должен привести схему в исходное положение: выключить и включить вновь S1.
В полуавтоматическом режиме управление установкой осуществляется с помощью тумблеров
S3...S6.
Перемычку между зажимами 1 и 2 устанавливают, если воду используют в проточных охладителях молока. Если установка работает на резервуар-охладитель, то в разрыв между зажимами включают управляющие контакты от его системы управления.
|
|
Видеоматериалы к занятию |
ТЕМА 2.3 АВТОМАТИЗАЦИЯ
Полнорационное кормление – основное условие реализации генетического потенциала продуктивности птицы, увеличение сроков её хозяйственного использования, а также снижение затрат и удешевление продукции.
Для раздачи кормов птице используют стационарные и мобильные кормораздатчики. Стационарные раздатчики кормов легче автоматизировать, чем мобильные.
Автоматизация кормления птицы зависит от ее вида, возраста, способа содержания и свойств корма, прежде всего от его влажности. При групповом способе содержания продуктивной птицы применяют групповое (стадное) кормление, регламент которого устанавливают исходя из зоотехнических требований. Автоматизация раздачи кормов позволяет уменьшить затраты на выращивание птицы на 30-40% и обеспечить своевременность кормления.
Окончание цикла раздачи корма можно определить по возврату корма в бункер-дозатор либо по заполнению последней в контуре кормораздатчика кормушки. Многочисленные конструкции раздатчиков корма могут быть классифицированы как стационарные и мобильные, причем последние встречаются сегодня достаточно редко.
В промышленном птицеводстве используется исключительно групповое кормление с помощью желобковых и бункерных кормушек, причем измерение количества корма базируется на изменении продолжительности его раздачи, что возможно только в том случае, если поток корма постоянен.
Объектом автоматизации является установка раздачи кормов колебательного типа (рисунок 1). Она предназначена для раздачи сухих готовых кормов (комбинированные кормовые смеси, гранулированные корма, зерно и др.).
Рисунок 1 – Технологическая схема кормораздатчика колебательного типа
Кормораздатчик состоит из продольных и поперечных кормушек, механизма привода продольных кормушек, бункера-дозатора и механизма привода поперечных кормушек.
Раздача кормов осуществляется следующим образом. При наступлении времени кормления электродвигательный исполнительный механизм открывает заслонку бункера-дозатора, из которого корм начинает высыпаться и поступает на одну из продольных кормушек 2. Эти кормушки приводятся в движение приводной станцией. При их возвратно-поступательном движении с разными ускорениями корм перемещается по желобу в одном направлении ровным непрерывным слоем и поступает на поперечную кормушку 3. С нее он попадает на остальные продольные кормушки. Так как продольные и поперечные кормушки образуют замкнутую систему, то корм, перемещаясь по каждой из них в определенном направлении, движется по замкнутому кругу, пересыпаясь из кормушки в кормушку, что исключает его потери.
Функциональная схема автоматизации кормораздатчика изображена на рисунке 2. Автоматизация кормораздатчика выполнена в функции времени, уровня и пути.
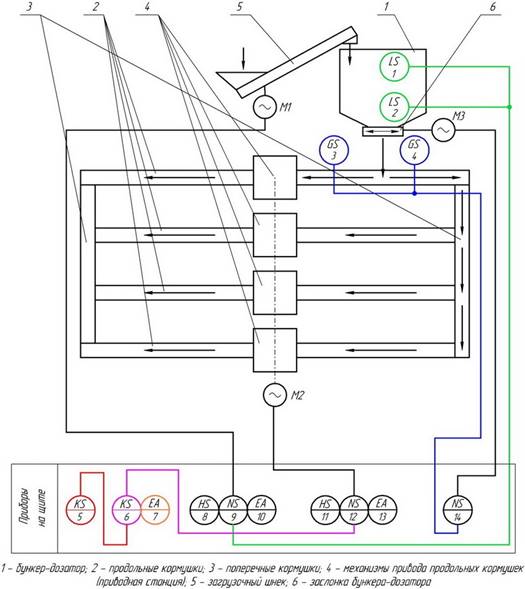
Рисунок 2 – Функциональная схема автоматизации кормораздатчика колебательного типа
Управление электродвигателем М1 загрузочного шнека производится в функции уровня корма в бункере, информация об уровне поступает с мембранных датчиков уровня 1 и 2. При наступлении времени кормления программное реле 5 даёт команду на начало кормораздачи, при этом срабатывает предпусковая звуковая сигнализация 7, продолжительность которой задана при помощи реле времени 6, после её отключения открывается заслонка бункера-дозатора при помощи электродвигательного исполнительного механизма M3 и запускается электродвигатель М2 приводной станции. Корм равномерно распределяется по кормушкам. По окончании кормораздачи программное реле 5 подаёт команду на закрытие заслонки и отключение электродвигателя приводной станции.
Для ограничения движения заслонки бункера-дозатора используются конечные выключатели 3 и 4, которые при достижении заслонкой крайних положений отключают электродвигатель M3 привода заслонки.
Функции, выполняемые принципиальной электрической схемой (рисунок 3):
– защита сети от аварийных режимов работы;
– ручной и автоматический режим работы;
– автоматическое регулирование уровня корма в бункере;
– автоматическое открытие заслонки бункера и автоматический запуск электродвигателя приводной станции по заданной программе, предварительное включение перед этим предпусковой звуковой сигнализации;
– работа исполнительного электродвигательного механизма заслонки бункера в функции пути; – световая сигнализация работы загрузочного шнека и приводной станции.
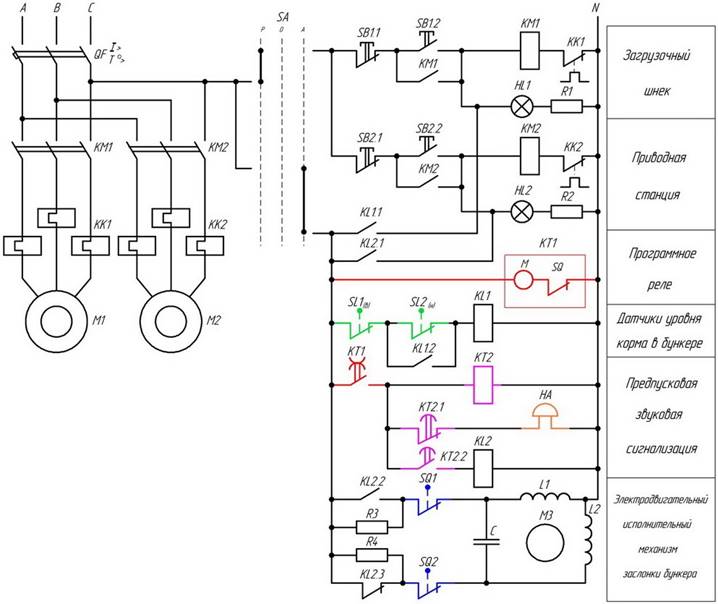
Рисунок 3 – Принципиальная электрическая схема управления кормораздатчиком колебательного типа
Включается автоматический выключатель QF и подается питание в главную цепь и цепь управления. Для работы в ручном режиме переключатель SA ставится в положение «Р». В этом случае управление электродвигателем загрузочного шнека М1 производится магнитным пускателем KМ1 посредством нажатия кнопок SB1.1 и SB1.2, а электродвигателем приводной станции М2 – магнитным пускателем KМ2, кнопками SB2.1 и SB2.2. При работе данных электродвигателей загораются сигнальные лампы HL1 и HL2. В случае перегрузки одного из электродвигателей увеличиваются линейные токи в цепи питания данных электродвигателей. В этом случае нагревательный элемент теплового реле КК1 или КК2 воздействуют на свой контакт, которые в свою очередь размыкают цепь питания катушки магнитного пускателя KМ1 и KМ2.
Для работы схемы в автоматическом режиме переключатель SA ставится в положение «А».
При отсутствии корма в бункере контакты датчиков уровня SL1 и SL2 замкнуты. Промежуточное реле KL1 сработает и своим контактом KL1.1 обеспечит включение загрузочного шнека, а контактом KL1.2 зашунтирует датчик SL2. При достижении кормом датчика нижнего уровня SL2 контакт данного датчика разомкнется, однако катушка KL1 будет продолжать получать питание через свой контакт KL1.2 и обесточится лишь при достижении кормом датчика верхнего уровня SL1 разомкнувшего цепь. При этом электродвигатель загрузочного шнека обесточится. По мере убывания корма из бункера в начале контакт SL1 вернется в своё исходное положение, однако катушка KL1 сможет получить питание только после полного опорожнения бункера, когда замкнется контакт SL2, загрузочный шнек снова вступит в работу.
При наступлении времени кормления замыкается контакт программного реле KТ1, получат питание катушки реле времени КТ2 и звонок НА. После выдержки времени необходимой для работы предпусковой звуковой сигнализации отключится звонок HA контактом KТ2.1 и включится катушка реле KL2 при помощи контакта KТ2.2. Контакт данного реле KL2.1 обеспечит питание электродвигателя приводной станции, KL2.2 запустит электродвигатель М исполнительного механизма заслонки бункера и этот электродвигатель будет работать на открытие данной заслонки до тех пор, пока она не дойдет до конечного выключателя SQ1. Корм начинает высыпаться в желоба кормушек и равномерно распределяться по ним посредством работы приводной станции. По окончании времени кормления контакт программного реле KТ1 разомкнётся, катушка KL2 обесточится, контакт KL2.1 обесточит приводную станцию, а KL2.3, вернувшийся в исходное положение, запустит электродвигатель М таким образом, чтобы заслонка бункера закрывалась. Данный электродвигатель обесточится при полном закрытии заслонки, то есть при срабатывании конечного выключателя SQ2.
Рассмотрим типовую автоматизированную линию кормления птиц. Линия включает в себя бункер 1 (рисунок 1) сыпучих кормов, поперечный транспортер 2, продольные транспортеры с кормушками 3 и поворотные станции, при помощи которых образуется замкнутый контур кормораздаточной цепи. Для наполнения бункера 1 используют специальный загрузчик, установленный на шасси автомобиля.
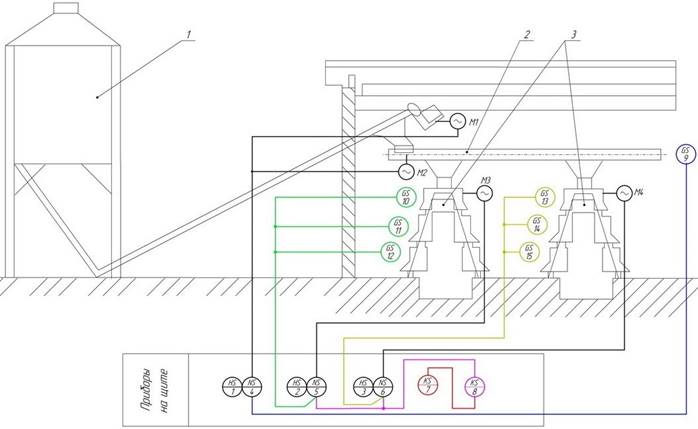
Рисунок 1 – Функциональная схема автоматизации раздатчика кормов БКМ-3
Корм из бункера 1 наклонным транспортёром подается в приемник горизонтального поперечного транспортёра 2, который доставляет его в бункер клеточных батарей, загружая их последовательно. Когда бункер первой батареи заполнится до верха, корм перекрывает выгрузное окно поперечного транспортера и начинает перемещаться к бункеру второй батареи, затем к третьей и т. д. После наполнения последнего бункера вся линия подачи корма отключается. Бункерные кормораздатчики включаются по сигналу программного реле времени. Работу раздатчика прекращает конечный выключатель, установленный в конце клеточной батареи.
Система автоматизации кормораздатчка выполнена в функции времени. Программное реле времени (позиция 7) в момент срабатывания подаёт сигнал на второе реле времени (позиция 8), которое подаёт команду магнитным пускателям (позиция 5, 6) на пуск двигателей кормораздачи всех клеточных батарей. По истечению положенного времени кормления двигатели отключаются. При возможном обрыве цепи на одном из уровней всех клеточных батарей, срабатывают конечны выключатели (позиция 10, 11, 12 или 13, 14, 15) которые подают сигнал на отключение магнитного пускателя (позиция 5 или 6). Запуск двигателей, отвечающих за загрузку корма в бункера клеточных батарей, осуществляется конечным выключателем (позиция 9). В момент отсутствия корма в последнем бункере конечный выключатель подаёт команду магнитному пускателю (позиция 4) на запуск двигателей загрузки. Управлять работой кормораздатчика можно также в режиме ручного управления при помощи аппаратов (позиция 1, 2, 3).
На рисунке 2 изображена принципиальная электрическая схема управления загрузкой бункеров всех клеточных батарей БКМ-3 и кормораздачей первой батарей. Кормораздача в других батареях и их электрические схемы кормораздачи аналогичны первой. Аппаратура кормозагрузки (KT1, KМ1, KV1, KV2, KТ2, HL1) находится в общем шкафу управления. Аппаратура кормораздачи (для первой батареи KМ2, KV3, HL2) находится в шкафах соответствующих батарей. В цепи управления пускателем KМ1 кормозагрузки, который включает и отключает все электродвигатели линии загрузки кормов, включены контакты тепловых реле KK1... KKЗ электродвигателей горизонтального и наклонного транспортеров.
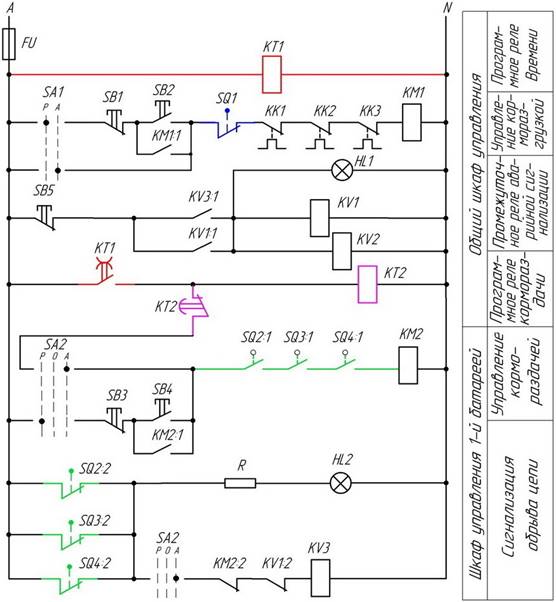
Рисунок 2 – Принципиальная электрическая схема управления линией кормления птиц
В ручном режиме переключатели ставят в положение «Ручн.». Для управления транспортером кормозагрузки используют кнопку SB2 «Загрузка». Отключается транспортер конечным выключателем SQ1 при заполнении бункера последней батареи или кнопкой «Стоп» поста управления SB1.
Для управления механизмами кормораздачи клеточной батареи в ручном режиме используют шкаф управления КБН-3-07.000. Включают и останавливают двигатель кормораздачи первой батареи кнопками SB4 и SB3. При обрыве цепи кормораздачи остановка двигателя осуществляется выключателями обрыва цепи SQ2.2,…,SQ4.2, на шкафу управления батареи и в зале загораются сигнальные лампы.
В автоматическом режиме все переключатели устанавливают в положение «Авт.». Механизмами кормозагрузки управляют при помощи выключателя подачи корма SQ1, который размещён на бункере последней клеточной батареи. При его заполнении подается команда на остановку двигателей транспортеров подачи. Процесс загрузки происходит независимо от установок программных реле.
Когда нет обрыва цепей кормораздачи на трех ярусах батарей, контакты конечных выключателей SQ2.1,…,SQ4.1 в цепи катушки KМ2 замкнуты, а в цепи сигнализации разомкнуты. Команды на включение транспортеров кормораздачи поступают от реле времени KТ1 в соответствии с технологическими режимами кормления. В момент замыкания контакта KT1 через размыкающий контакт KТ2 второго программного реле происходит автоматический запуск двигателей кормораздачи всех клеточных батарей. Выдержка времени контакта KТ2 устанавливается равной длительности кормораздачи батареи.
В случае обрыва цепи кормораздачи на любом ярусе одной из клеточных батарей контакты конечных выключателей SQ2.2,…,SQ4.2 в цепи сигнальной лампы HL2 замыкаются, а контакты SQ2.1,…,SQ4.1 размыкаются, останавливая двигатель цепочного транспортёра. Через контакты KV1.2 и KM2.2 сигнал поступает на катушку реле KV3, контакт последнего KV3.1 замыкается в цепи катушки KV1 и сигнал аварии поступает на сигнальную лампу HL1, установленную в зале. Для снятия сигнала в зале необходимо переключатель SA2 шкафа управления батареи поставить в положение О «Отключено» и нажать кнопку SB5 – «Съём сигнала».
Птицеводческие хозяйства активно переходят на автоматизированные системы поения птицы. Эти несложные, на первый взгляд, устройства позволяют снизить расход воды, улучшить микроклимат в птичниках и облегчить труд работникам.
В зависимости от рациона питания и возраста, в организме птицы содержится 65–78% воды. Её качество и периодичность поступления оказывает влияние на здоровье поголовья, интенсивность роста и продуктивность. Режим потребления воды зависит от температуры и влажности воздуха, особенностей рациона и возраста особей. Обеспечить бесперебойной подачей воды кур-несушек, бройлеров и перепелов поможет автоматическая система поения птицы. Наиболее совершенными считаются ниппельные поилки. Ниппельные системы полностью соответствуют гигиеническим нормам и обеспечивают оптимальный режим поставки чистой воды в поилки. При необходимости вместе с водой можно снабжать поголовье водорастворимыми витаминами, аминокислотами и антибиотиками.
Ниппельная система поения для кур, уток и другой птицы состоит из следующих компонентов:
– узла водоподготовки;
– ниппелей; – системы подвеса;
– конечного элемента.
Узел водоподготовки (рисунок 3) отвечает за учёт потребления, фильтрацию и смешивание воды с лекарственными препаратами. Он состоит из системы водопроводных труб, которые соединяют между собой фильтр, счётчик и медикатор. Использование фильтров грубой очистки в ниппельных поилках обязательно, так как попавший песок или мусор могут вывести из строя компоненты системы. Медикатор отвечает за подготовку и дозирование раствора, который впоследствии подаётся к поилкам. В его конструкции содержится поршневой двигатель, который не требует дополнительных источников энергии, работая исключительно за счёт давления воды.


Рисунок 3 – Узел водоподготовки ниппельной Рисунок 4 – Система подвеса ниппельной поилки
поилки
Дозирование добавок колеблется в пределах от 0,02 до 50 л/ч. Процентное соотношение готового раствора не зависит от давления в трубопроводе, так как отгрузка добавок происходит пропорционально объёму пропущенной жидкости.
Ниппель считается главным элементом конструкции. Они отвечают за регуляцию водного потока, обеспечивая точное дозирование даже при низком давлении в системе. Ниппели крепятся к трубе поверх каждой из чаш для поения.
Система подвеса (рисунок 4) состоит из металлического профиля и держателей, соединённых с основным тросом и лебёдкой регулировки высоты. В современных системах ниппельного поения птицы лебёдка позволяет поднять линию хоть под самый потолок, обеспечивая оптимальную высоту её расположения при пересадке животных или чистке птичника.
Конечный элемент располагается в конце трубопровода. В зависимости от конфигурации системы снабжается отводчиком воздуха и автоматической системой промывки. Схема системы ниппельного поения изображена на рисунке 5.
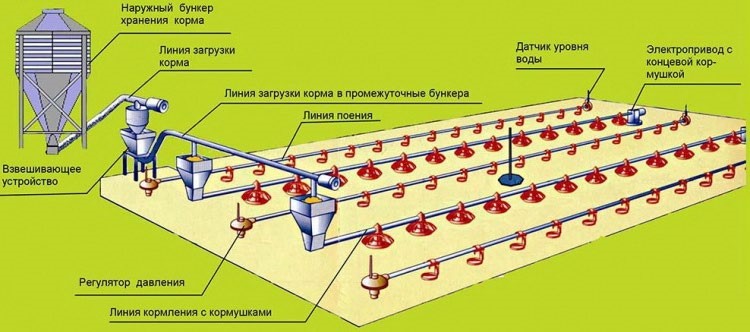
Рисунок 5 – Схема системы ниппельного поения птицы
|
|
Видеоматериалы к занятию |
УРОК №24. АВТОМАТИЗАЦИЯ МИКРОКЛИМАТА В ПТИЦЕВОДЧЕСКИХ ПОМЕЩЕНИЯХ.
Создание оптимального микроклимата в птицеводстве является важным параметром, от которого зависит ветеринарное благополучие птицы, а значит и все производственные и экономические показатели в целом. Состояние микроклимата зависит от многих условий погоды, типа помещения, вентиляции, отопления и др. Важнейшими параметрами микроклимата являются:
− температурные показатели;
− влажность, консистенция и скорость воздуха; − уровень освещения; − уровень шума.
Неоптимальный микроклимат в птичниках может провоцировать развитие целого ряда патологических состояний организма птицы. Это может быть связанно с недостаточным воздухообменом, перепадами температуры, избыточным содержанием в воздухе аммиаки и углекислого газа, недостаточной или избыточной влажностью.
Поэтому оптимизация микроклимата в автоматизации птицеводства является первостепенной задачей и позволяет добиться сразу несколько положительных эффектов:
− растёт активность птицы, поедаемость кормов, привесы;
− уменьшается коэффициент конверсии кормом;
− снижаются энергозатраты на избыточную вентиляцию и обогрев помещений; − уменьшаются трудозатраты сотрудников в процессе производства.
Проблема управления микроклиматом в птицеводстве весьма сходна с аналогичной проблемой в животноводстве. Однако в птицеводстве имеются некоторые специфические особенности регулирования условий среды, в частности при выращивании молодняка и инкубации яиц.
Молодняк птиц, особенно в раннем возрасте, нуждается в особых условиях содержания.
Температура в зоне обитания молодняка сначала должна поддерживаться на уровне 34...35 °С и постепенно, по мере взросления птиц, снижаться до 20...22 °С. Особые требования предъявляют также к влажности воздуха. При содержании молодняка она должна быть несколько выше, чем для взрослого поголовья, а колебания ее ограничены пределами ±2,5 %. Воздушная среда птичников интенсивно загрязняется, и перерывы в вентиляции очень скоро приводят к гибели птиц, поэтому к её надёжности предъявляют особые требования.
Летом, когда обогрев не требуется, воздухообмен в птичниках регулируют в функции температуры. Рациональный режим вентиляции птичников показан на графике (рисунок 1).
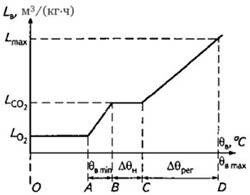
Рисунок 1 – График регулирования вентиляции в птичнике
На участке ОА при температуре ниже допустимой минимальной θmin воздухообмен уменьшают до
LO2 , исключающего кислородное голодание. На участке АВ (между минимальной и номинальной температурой) воздухообмен увеличивают до номинального LCO2 . На участке ВС номинальной температуры
∆θн сохраняется номинальная вентиляция. При повышении температуры сверх номинальной (участок CD) вентиляция пропорционально ей увеличивается до максимума.
Системы вентиляции используют в птицеводстве, для создания максимально комфортного микроклимата в помещениях, где содержится птица. В автоматизации птицеводства большое значение имеет грамотная организация вентилирования помещений. Это позволяет поддерживать условия, наиболее благоприятные для птицы, что способствует ее быстрому росту. Можно сказать, что основным потребителем энергоресурсов на птицефабриках, как правило является система вентиляции. Снизить энергозатраты и увеличить производительность производства, помогает соблюдение регламента воздухообмена и это особенно актуально в зимнее время. Регламент должен соответствовать, во-первых, возрасту птицы, а во- вторых структуре помещении. Очень важно правильно выбрать оборудование, для вентилирования помещений. Оно должно обладать энергосберегающими свойствами и отличаться простотой. При соблюдении данных условий вентиляция помещений будет наиболее эффективной.
Система управления микроклиматом птицекомплекса от компании ОВЕН позволяет поддерживать оптимальные параметры микроклимата при выращивании птиц. Схема системы приведена на рисунке 2.
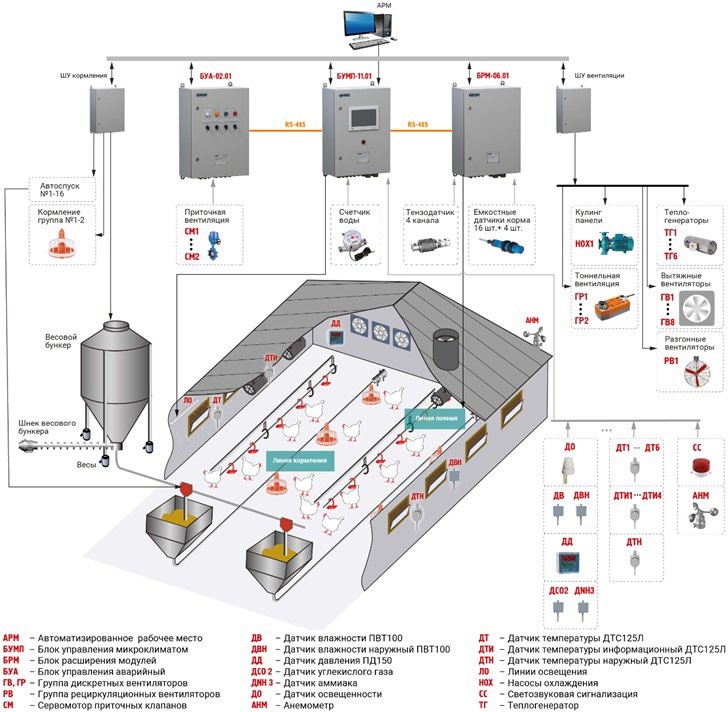
Рисунок 2 – Схема системы управления микроклиматом птицекомплекса от компании ОВЕН
К блоку управления микроклиматом БУМП-11.01 подключаются датчики температуры ДТС125Л, углекислого газа ПКГ100, влажности ПВТ100, давления ПД150, а также датчики положения сервоприводов. По результатам анализа полученных от датчиков данных осуществляется управление приточными и тоннельными клапанами. Система анализирует потребление воды, уровень освещённости и отслеживает возникновение аварийных ситуаций.
К блоку расширения модулей БРМ-06.01 подключается система освещения и исполнительные механизмы: группы вентиляции, циркуляционные вентиляторы, насосы кулинг-панелей, теплогенераторы, двигатели шнеков подачи корма и системы кормления, клапаны кормовых хопперов. Также к блоку БРМ-06.01 подключаются тензодатчики системы взвешивания корма.
Блок управления аварийный БУА-02.01 обеспечивает бесперебойную работу блоков БУМП-11.01, БРМ-06.01, светозвуковой сигнализации, сервоприводов приточных клапанов при пропадании основного питания.
Обмен данными между блоками осуществляется через интерфейс RS-485 по протоколу Modbus. Подключение блока БУМП-11.01 к SCADA-системе осуществляется через интерфейс Ethernet.
Изменение параметров фиксируется в журнале событий, в архив записываются аварии, значения уставок и все действия персонала, осуществляемые в ручном режиме.
Изменение и мониторинг параметров возможно из диспетчерского пункта, посредством SCADAсистемы, а также с панели оператора или с планшета через стандартный веб-браузер.
Достоинства системы:
− Универсальность. Подходит для управления микроклиматом любого птицекомплекса. Не зависит от размеров помещения и особенностей технологии содержания птиц.
− Комплексность. Система поддерживает заданные значения температуры и влажности в помещении, контролирует уровни углекислого газа и аммиака в воздухе, а также управляет исполнительными механизмами, включая группы вентиляции, линии поения, кормления и освещения.
− Экономичность. Внедрение системы позволяет более рационально использовать корм за счёт управления адресной подачей корма в системе кормораздачи по заданному графику.
− Энергоэффективность. Достигается за счёт возможности управления тоннельной и шахтной вентиляцией с учётом температуры и относительной влажности наружного воздуха, скорости ветра.
− Простота эксплуатации. Блоки управления оснащены большим графическим дисплеем, обеспечивающим лёгкость настройки и считывания параметров системы. Все разделы меню представлены на русском языке.
− Защищённость от несанкционированного доступа к изменению настроек. Защита паролем обеспечивает доступ к системе трём группам пользователей в рамках разрешённых полномочий.
− Диспетчеризация и оповещение. Диспетчеризация на базе SCADA-системы позволяет оперативно отслеживать и изменять значения параметров микроклимата в птицекомплексах из диспетчерского пункта, а также оперативно реагировать на возникновение аварийных ситуаций.
Системы общего отопления способны обеспечить надёжный комфорт только в хорошо теплоизолированных помещениях. При отсутствии этих условий эффект не достигается, несмотря на значительный расход теплоты. Даже в хорошо отапливаемых помещениях распределение температуры по высоте неравномерно. В начальный период развития птицы требуется повышенная температура в зоне её пребывания. Для выполнения этого требования используются средства местного обогрева.
Достоинства местного обогрева:
– сокращение смертности молодняка;
– повышение привесов;
– высокая экономичность вследствие целенаправленного использования электроэнергии (возле птицы).
Виды местного обогрева:
– лучистый (инфракрасными (ИК) лучами);
– конвективно-кондуктивный (электрообогреваемые полы, коврики); – комбинированный.
Лучистый обогрев осуществляется с помощью переносных и стационарных электрических облучателей, состоящих из источника ИК-лучей (ИК-лампы, трубчатые электронагреватели (ТЭНы) и арматуры.
При обогреве ИК-лампами режим работы – циклический (время работы чередуется временем паузы). Он задаётся блоком программного управления БПУ (рисунок 3).
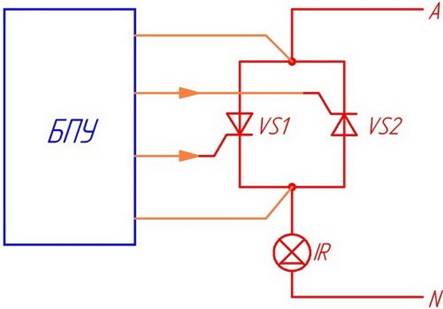
Рисунок 3 – Упрощённая схема управления ИК-лампами
Рассмотрим электрическую схему брудера Б-4 (рисунок 4), рассчитанного на обслуживание от 500 до 600 цыплят.
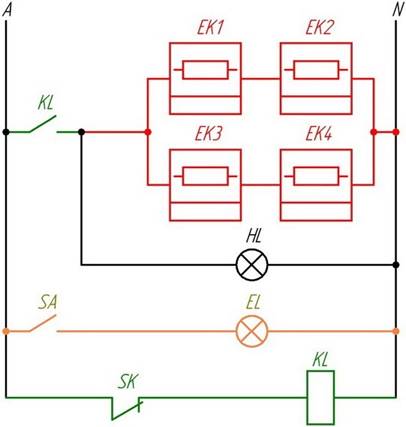
SK – термореле; EL – осветительная лампа; HL – сигнальная лампа; SA – тумблер
Рисунок 4 – Электрическая схему брудера Б-4
Большими преимуществами обладает содержание молодняка птицы, на тёплом (обогреваемом) полу. При этом передача теплоты к телу птицы осуществляется наиболее эффективным контактным (кондуктивным) способом, а также за счёт конвекции воздуха от нагретой поверхности
Для электрообогрева полов применяют специальные нагревательные провода марок ПОСХВ, ПОСХП, ПОСХВТ (провод обогревательный Сельскохозяйственный с изоляцией соответственно из поливинилхлорида, полиэтилена и поливинилхлоридного пластиката). Помимо нагревательных проводов, для обогрева полов иногда используют неизолированный оцинкованный стальной провод ПСО диаметром от 4 до 6 мм. Более совершенными, но пока менее распространенными в устройствах обогрева полов являются нагревательные кабели марок ПНВСВ, КНРПВ и КНРПЭВ, которые имеют усиленную термостойкую изоляцию из кремнийорганической резины и поливинилхлоридного пластиката, защитную оболочку из стальных оцинкованных проволочек.
Устройство электрообогревамого пола показано на рисунке 5. В бетонное покрытие пола толщиной (10...20)∙10-2 м закладывают нагревательный провод в виде зигзага с определенным шагом, определяемым расчётом. Над проводом размещают защитную металлическую сетку, служащую для предотвращения выходи потенциала па поверхность пола при повреждении изоляции провода. Сетку надёжно соединяют с нулевым приводом питающей сети. Под бетонным покрытием устраивают тепло» и гидроизоляцию для уменьшения утечки теплоты в грунте и обратного проникновения грунтовой влаги.
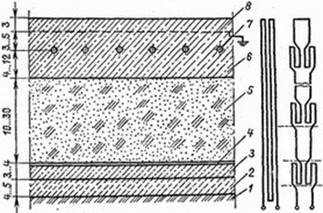
1 – утрамбованный грунт; 2 – щебень; 3, 6 – бетон; 4 – гидроизоляция; 5 – теплоизоляция (котельный шлак); 7 – нагревательный провод; 8 – защитная сетка
Рисунок 5 – Электрообогреваемый пол (размеры в см): а – схематический разрез; б, в – способы укладки нагревательного провода
Управление электрообогреваемыми полами может осуществляться при помощи электромеханических термостатов, цифровых терморегуляторов и программируемых термостатов (рисунок 6).
 а б
в
а б
в
Рисунок 6 – Регулирующие устройства для электрообогреваемых полов:
а – термостат электромеханический; б – цифровой терморегулятор; в – термостат программируемый Конструкция системы автоматизации электрообогреваемых полов показана на рисунке 7.
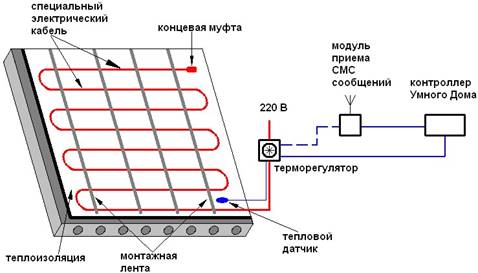
а
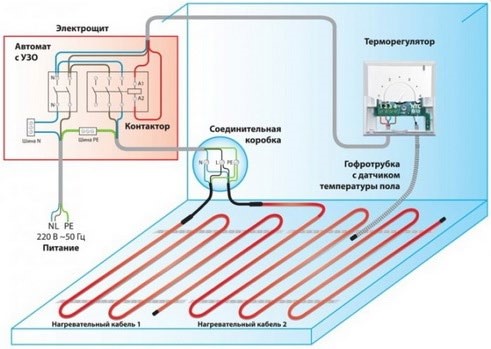 б
б
Рисунок 7 – Конструкция системы автоматизации электрообогреваемых полов: а – схема монтажа; б – подключение к терморегулятору
Современное промышленное птицеводство немыслимо без искусственной инкубации яиц в электрических инкубаторах. Для вывода полноценного молодняка птицы в инкубаторе должен быть создан строго определённый микроклиматический режим инкубации.
При выведении цыплят в инкубаторе ИКП-90 «Кавказ» поддерживаются следующие параметры:
– температура воздуха (плюс 36 °С, ±0,2 °С),
– относительная влажность от 45 до 75% (поддерживается автоматически с отклонениями не более
± 3%),
– достаточная вентиляция с кратностью воздухообмена от 6 до 36 в час и скоростью воздуха до 1,7 м/с.
В камере располагаются три вентилятора и один увлажнитель. Лотки с яйцами поворачиваются на угол 90 ° с частотой поворота два раза в час.
Подогрев воздуха ведётся конвекционными способами, путём передачи теплоты от нагревательного элемента 4 (рисунок 8) нагревательной среде. Для создания необходимой влажности воздуха используется клапан.
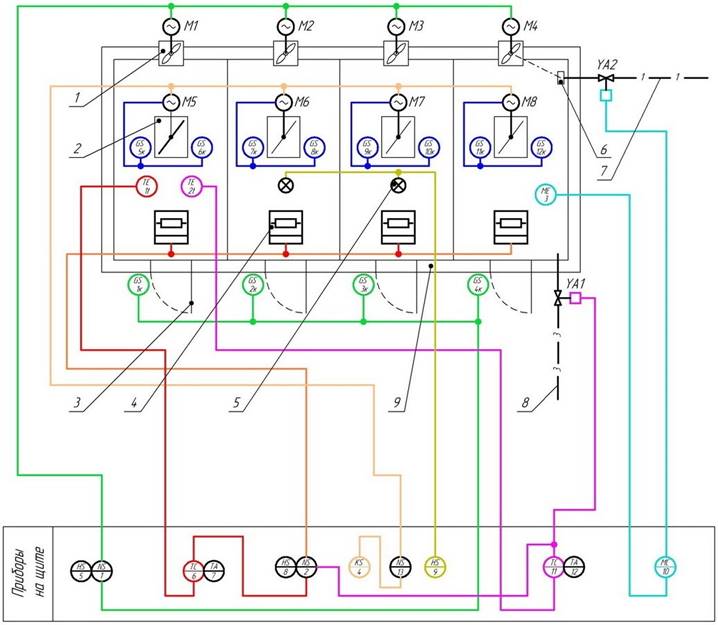
1 – вентилятор; 2 – механизм поворота лотков; 3 – дверь камеры инкубатора; 4 – нагреватель;
5 – осветительная лампа; 6 – распылитель; 7 – трубопровод подачи воды;
8 – канал воздушного охлаждения; 9 – теплоизоляция
Рисунок 8 – Функциональная схема автоматизации инкубатора
Для воздухообмена используется вентилятор 1. Для нормального развития зародышей так же необходимо переворачивать лотки с яйцами, используются электродвигатели М5,…,M8. Для обеспечения поворачивания яиц служит механизм поворота лотков, в котором поворотные барабаны укреплены на общем валу. Барабаны вращаются с частотой 0,27 оборотов в минуту, переходя из одного положения в другое через каждые 2 часа. Электродвигатель и червячный редуктор установлены на основном прикреплённом к задней стенке инкубатора. Вращение валу барабанов сообщается из зубчатого сектора и червяка кулачковой муфтой, соединенной с выходным валом редуктором, второй конец вала служит для поворота барабанов вручную, рукояткой.
Система увлажнения служит для поддержания заданной влажности воздуха. В камеру автоматически вводится дополнительная влага. Вода распыляется форсункой на мельчайшие капли, которые подхватываются воздушным потоком и испаряются. Системой воздухообмена регулируется движение воздуха в камере. Эта система состоит из вентилятора с заслонками.
Контроль за температурой воздуха внутри камеры осуществляется при помощи термодатчика (позиция 1t), подключенного к регулятору (позиция 6), который при достижении температуры ниже заданного значения даёт команду исполнительному элемента (позиция 2) на включение нагревательных элементов 4. При достижении температуры внутри камеры верхнего допустимого значения сработает термодатчик (позиция 2t), подключенный к регулятору (позиция 11), который, в свою очередь, отключит нагревательные элементы, откроет электромагнитную заслонку охлаждения YA1 и включит сигнализацию (позиция 12). Влажность воздуха внутри камеры контролируется при помощи датчика (позиция 3), подключенного к регулятору (позиция 10), управляющему соленоидом увлажнения YA2. При открывании хотя бы одной из дверей камер сработают конечные выключатели (позиции 1к – 4к) и посредством магнитного пускателя (позиция 1) отключат электродвигатели M1,…,M4 вентиляторов. Программное реле (позиция 4) управляет работой электродвигателей M5,…,M8 поворота лотков, которые отключатся при достижении ими крайних положений.
Принципиальная электрическая схема приведена на рисунке 9.
Работа схемы
Изменение температуры в камере ведёт к изменению сопротивления установленного в ней датчика. Датчик включает в диагональ измерительного моста регулятора температуры SK1. Напряжение разбалансированного моста значение и знак, которого зависит от сопротивления термометра, после усиления и соответствующих электрических преобразователей, осуществляемых регулятором SK1, выдаётся в виде команд пускатель KM1, включающий нагреватели EK1,…,EK4 на полную мощность, или на тиристор VS, включающий нагреватели EK1, EK2 на 50% мощности либо на тяговый электромагнит YA1, открывающий заслонки охлаждения. Если температура в камере достигает 38,3 °, термоконтакт ВК замыкает вход блока аварийной температуры SK2, который отключает лампу «авария» HL1. В свою очередь отключение реле KV приводит к отключению нагревателей EK1,…,EK4 и включению электромагнита YA1, открывающего воздушную заслонку, включается звуковая сигнализация.
В качестве блока аварийного канала температуры в схеме автоматики инкубатора используется терморегулятор, включающий в себя усилительное устройство УКТ-4 c ртутным контактом датчиком типа ТПК.
В качестве датчика влажности используется термометр Sφ с магнитной регулировкой. Когда относительная влажность в камере заданного значения, контакты термометра Bφ замыкают вход регулятора влажности, который отключает соленоид увлажнения YA2 и сигнальную лампу HL6, показывающую, что влажность соответствует норме. Подача воды в камеру прекращается. Если влажность в камере ниже заданной, процесс протекает в обратном порядке. Электродвигатель М4, на валу которого закреплён диск распылителя, включается одновременно с электродвигателями вентиляторов (М1,…,М3) пускателем KМ2.
При закрытых дверях и включённом тумблере SA1 электродвигатели работают непрерывно. При открывании хотя бы одной двери размыкает контакты один из микропереключателей SQ1,…,SQ4 и обесточивает катушку пускателя KМ2, который в свою очередь отключает электродвигатели вентиляторов М1,…,М3. При этом загорается лампа HL2 («открытые двери») световая сигнализация (HL1,…,HL6) регистрирует тот или иной режим работы инкубатора. Освещение камеры осуществляется двумя лампами EL1 и EL2. Освещение выключается прибором SA3.
Поворотные барабаны укреплены на общем валу. Барабаны вращаются с частотой 0,27 оборотов в минуту, переходя из одного положения в другое через каждые два часа. Эл. двигатель и червячный редуктор установлены на основном прикреплённом к задней стенке инкубатора. Вращение валу барабанов сообщается из зубчатого сектора и червяка кулачковой муфтой, соединенной с выходным валом редуктором, второй конец вала служит для поворота барабанов вручную, рукояткой. Для обеспечения поворота лотков программное реле KT замыкает свой контакт, обеспечивая тем самым срабатывание промежуточного реле KL2, которое запустит электродвигатель М5 соответствующего механизма, и этот электродвигатель будет работать на поворот в прямом направлении до тех пор, пока она не дойдет до конечного выключателя SQ5. Выдержку программного реле KT необходимо просчитать так, чтобы в этот момент его контакт вернулся в исходное разомкнутое состояние. При этом катушка реле KL2 обесточится, замыкая тем самым свой контакт KL2.2. Электродвигатель M5 будет вращать лотки в обратном направлении до тех пор, пока не сработает конечный выключатель SQ6. В этот момент контакт программного реле KT должен снова замкнуться, и данный цикл работы механизма поворота лотков повторится.
|
|
Видеоматериалы к занятию |
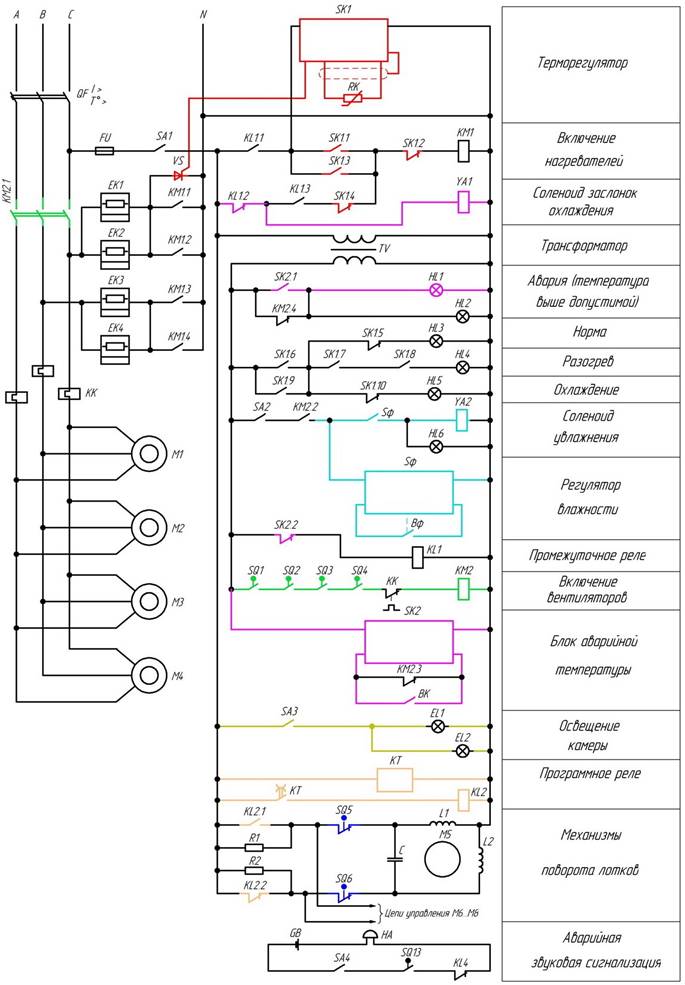
Рискнок 9 – Принципиальная электрическая схема управления инкубатором ИКП-90 «Кавказ»
УРОК №25. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ ПТИЧНИКОВ
Воздействие видимого излучения на живые организмы определяется уровнем освещенности рабочей поверхности, периодичностью освещения и спектральным составом излучения. Изменение продолжительности светового периода суток и частоты смены темноты и света позволяет управлять яйценоскостью кур и повышает продуктивность в бройлерном производстве. С этой целью птицу необходимо содержать в безоконных птичниках, имитируя естественный рассвет и сумерки.
Для автоматизации управления освещением птичников широко используют устройства программного управления светом УПУС-1 и УПУС-2, программные реле управления светом ПРУС-1 и ПРУС-2, программное устройство «Каштан» и другие.
При помощи устройства УПУС-1 (рисунок 1) задают программу светового режима на весь период содержания птицы.
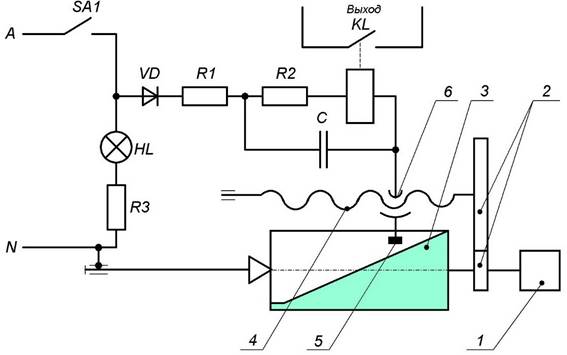
1 – часовой механизм; 2 – шестерёнчатая передача; 3 – программный барабан;
4 – ходовой винт; 5 – считывающий ролик; 6 – подвижная втулка
Рисунок 1 – Устройство реле УПУС-1
Часовой механизм 1 (типа 2РВМ) через шестерёнчатую передачу 2 вращает программный барабан 3. В состав устройства входят также ходовой винт 4, считывающий ролик 5 и подвижная втулка 6. На барабан наклеен лист бумаги с нанесенной программой на весь период содержания птицы. Программа учитывает вид птицы, возрастную группу, тип помещения и другие факторы. Устройство позволяет выдавать многонедельную программу. Происходит сложение двух движений: вращательного – программного барабана и поступательного – втулки с контактным роликом. Скорость перемещения контактного ролика вдоль барабана 0,75 мм в сутки. Следовательно, в каждые следующие сутки длительность горения ламп будет другой. Так ежесуточно считывается программа освещения в течение 52 недель, после чего втулка с роликом останавливается в крайнем положении, попадая в кольцевую выточку ходового винта. В дальнейшем эта программа остается неизменной до тех пор, пока не будет переставлен контактный ролик.
Искрение между контактным роликом и поверхностью барабана предотвращает электрическая цепь задержки (12…15с), которая состоит из диода VD, резисторов R1 и R2, промежуточного реле КL и конденсатора C. Когда ролик касается металлической поверхности барабана, катушка реле КL получает питание и своим замыкающим контактом (KT на принципиальной схеме, изображённой на рисунке 2) замыкает цепь питания магнитного пускателя KM. Установка электроосвещения вступит в работу. При достижении роликом изолированной поверхности барабана катушка KL теряет питание, электроосвещение прекращает свою работу.
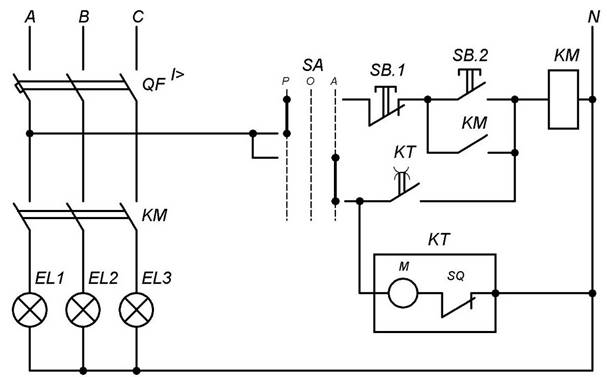
Рисунок 2 – Принципиальная электрическая схема управления осветительной установкой при помощи УПУС-1
В данной схеме предусмотрен режим ручного управления осветительной установкой при помощи кнопок SB.1 и SB.2, для его задания переключатель SA устанавливают в положение «Р».
Рассмотренное ранее устройство управления УПУС-1 производит одноступенчатое включение и выключение освещения.
Программное реле ПРУС-1 (рисунок 3) предназначено для плавного изменения светового дня в птичнике, ввод осветительной установки в работу и вывод из неё производится двумя ступенями.
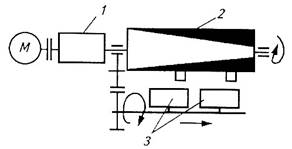
1 – редуктор; 2 – барабан; 3 – микропереключатели Рисунок 3 – Схема устройства ПРУС-1
Кроме этого, ПРУС-1 имеет следующие отличительные особенности по сравнению с УПУС-1:
− программные вырезы делаются на самом барабане;
− вместо считывающего ролика используются два микропереключателя, замыкающихся и размыкающихся с некоторым промежуточным интервалом;
− на выходе устройства установлено два промежуточных реле.
Вначале вводится первая ступень работы путём замыкания контакта KT.1 программного устройства (рисунок 4).
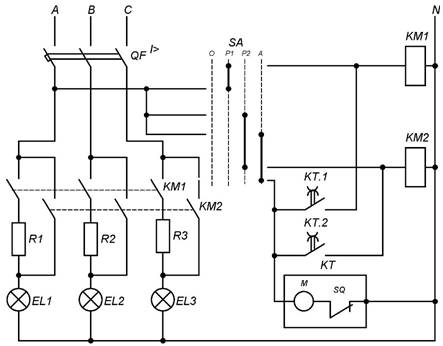
Рисунок 4 – Принципиальная электрическая схема управления осветительной установкой при помощи ПРУС-1
Сработает магнитный пускатель KM1. Осветительные лампы EL1...EL3 будут иметь ограниченный световой поток, так как они включены через сопротивления R1…R3, ограничивающие напряжение. Через 15 минут замкнётся контакт KT.2, сработает магнитный пускатель KM2, его контакты зашунтируют R1…R3, электроосвещение будет работать на полную мощность.
Специалисты группы компаний «Лаборатория Интеллект» более 12 лет создают и производят системы автоматизированного управления освещениям для птичников и пылевлагозащищенные светодиодные светильники. Предлагаются варианты систем управления освещением:
СВЕТОТЕХНИК-АП (рисунок 5) – автоматическая система с возможностью ручного управления, идеально подходит для напольного содержания птицы.
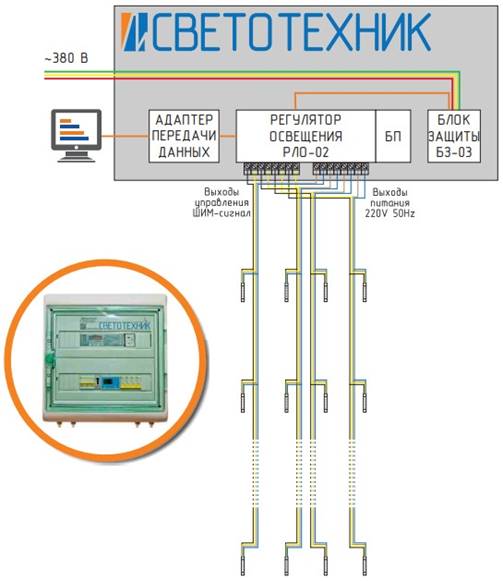
Рисунок 5 – Система управления освещением СВЕТОТЕХНИК-АП
Использование управляемых (диммируемых) светильников СВП-02 с напряжением питания 220 В позволяет обойтись без дополнительных источников питания. Программируемый регулятор освещения РЛО-02 в соответствии с заданной оператором программой обеспечит нужный уровень освещения.
СВЕТОТЕХНИК-АПН (рисунок 6) – автоматическая система на базе низковольтных (36 Вольт) управляемых (диммируемых) светильников СВП-04.
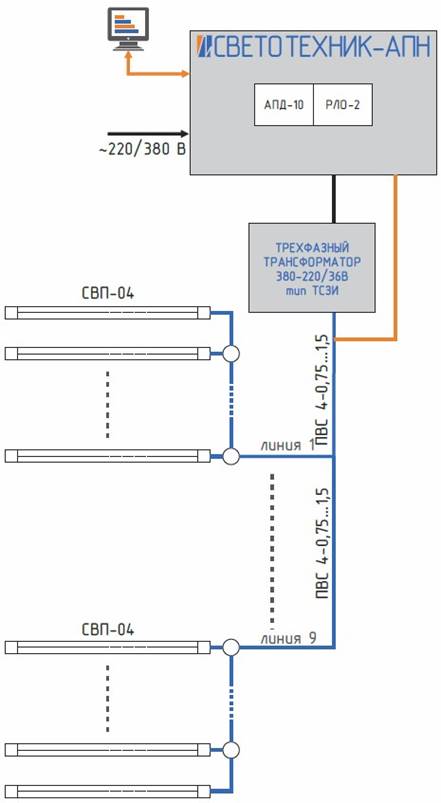
Рисунок 6 – Система управления освещением СВЕТОТЕХНИК-АПН
Возможно использование системы для управления освещением как при напольном, так и при клеточном содержании птицы. В системе также используются программируемый регулятор освещения РЛО02. В системе используется недорогой и надежный трансформатор типа ТСЗИ вместо дорогих импульсных источников питания.
СВЕТОТЕХНИК-АНК (рисунок 7) – автоматическая система управления клеточным освещением. Легкие (весом около 100 граммов) управляемые (диммируемые) светильники СВП-17 обеспечат нужную яркость в районе кормушек. Напряжение питания светильников составляет менее 40 Вольт, что делает эти светильники безопасными для работников. Программируемый регулятор РЛО-02 автоматически выставит нужную яркость освещения в соответствии с заданной программой.
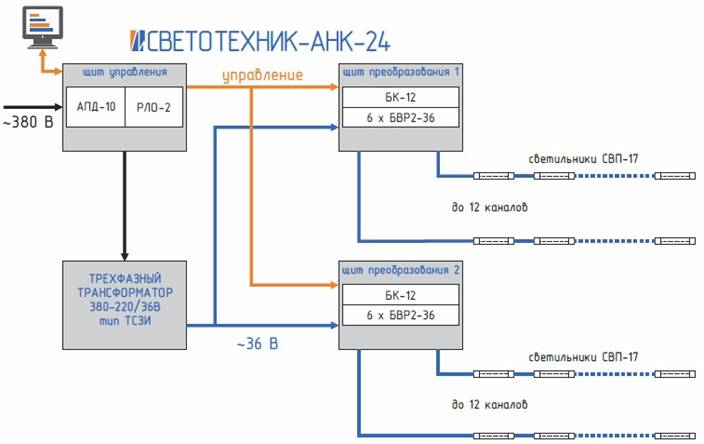
Рисунок 7 – Система управления освещением СВЕТОТЕХНИК-АНК
СВЕТОТЕХНИК-АНК2 (рисунок 8) – автоматическая система управления двухцветным клеточным освещением. Практическая реализация результатов научных исследований цветового зрения кур для обеспечения бесстрессовой технологии при клеточном выращивания птицы. Для организации технологического освещения в управляемых светильниках СВП-17 используются дополнительные светодиоды с длиной волны 465 нанометров, излучаемый свет которых не воспринимается птицей, но обеспечивает достаточную освещенность для человека. В состав системы входят программируемый регулятор освещения РЛО-2 и простой надежный трансформатор типа ТСЗИ.
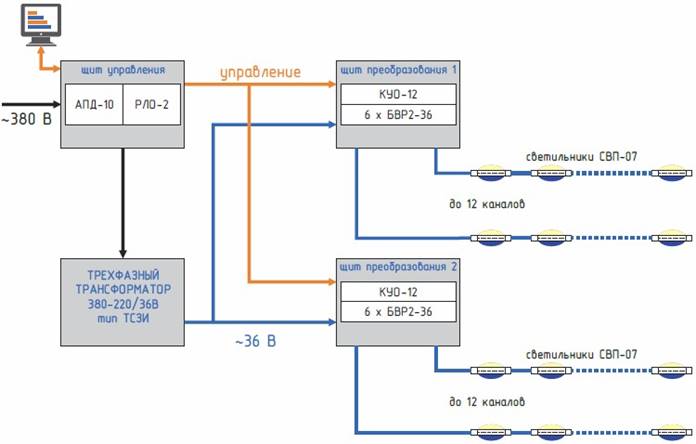
Рисунок 8 – Система управления освещением СВЕТОТЕХНИК-АНК2
Программируемый регулятор освещения РЛО-02 (рисунок 9) обеспечивает плавную регулировку освещённости от 0 до 100%, имеет реализованную функцию «плавный рассвет-закат заданной продолжительности», снабжен многофункциональным таймером включения/выключения и переключения освещения (до 99 программных режимов), программируемым на срок до 720 дней (2 года).

Рисунок 9 – Программируемый регулятор освещения РЛО-02
Программируемая система управления освещением может быть реализована с различными уровнями сложности, от простого реле времени, до удалённого управления через компьютерные сети или выделенный компьютер.
Возможна ручная регулировка уровня освещения, а также использование автоматических регуляторов освещения для ламп накаливания или люминесцентных ламп
Система подключается к трехфазной электрической сети переменного тока, что позволяет сбалансировать нагрузку на каждую из фаз электроснабжения. Возможно подключение системы к одной фазе.
Подключение к компьютеру(ноутбуку) для управления с помощью специально написанной программы производится с помощью адаптера передачи данных АПД-10 (рисунок 10).

Рисунок 10 – Адаптер передачи данных АПД-10
|
|
Видеоматериалы к занятию |
Уборка, утилизация и переработка помёта является трудоёмким процессом на ферме, что составляет от 30 до 35% трудовых затрат по уходу за птицей. Своевременная уборка способствует снижению уровня влажности, метана, аммиака внутри помещения и соответственно улучшает внутренний микроклимат, что способствует повышению комфортности для птицы и человека, предотвращает преждевременный износ оборудования и строительных конструкций.
В немеханизированном птицеводстве уборка помёта и чистая смена подстилки были самой трудоемкой работой, занимавшей до половины всех затрат труда по уходу за птицей. Помёт с пола удаляли ручными скребками, подстилку заменяли вручную ежедневно или раз в два, три дня. Механизация уборки позволила полностью освободить человека от этих операций и ликвидировать профессию помётчицы.
Во всех видах клеточного оборудования применяется ленточная система удаления помёта, позволяющая оперативно удалять помёт и обеспечивать надлежащие санитарные условия и благоприятный микроклимат в помещении. В сочетании вентиляции с сетчатой конструкцией перегородок и стенок клеток получается консистенция помёта, позволяющая реализовывать его как удобрение и способствует улучшению эффективности хозяйствования.
Периодичность уборки помёта зависит от способа содержания птицы. При клеточном содержании помёт убирается ежедневно, при напольном – несколько раз в год.
Уборка помёта из клеточных батарей является первой составляющей в общей технологии удаления и выгрузки помета из птичника для дальнейшей перевозки его в зону хранения или промышленной переработки.
Скреперная установка состоит из скреперов, горизонтального и наклонного транспортёров. Скреперная установка работает следующим образом. Скребки перемещаются по челночной схеме: одна тележка совершает рабочий ход, вторая движется по параллельному каналу ей на встречу вхолостую. Затем направление движения автоматически изменяется, и вторая тележка совершает рабочий ход. Скребки сгребают помет в конец птичника и сбрасывает его в поперечную траншею. Отсюда его забирает горизонтальный поперечный скребковый транспортёр, а затем наклонный транспортёр выносит из птичника и грузит в транспортные средства.
Технологическая схема скреперной установки приведена на рисунке 1.
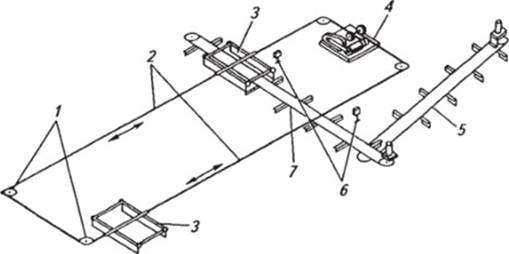
1 – поворотные устройства; 2 – трос; 3 – скребки; 4 – приводная станция; 5 – наклонный транспортёр;
6 – концевые выключатели; 7 – горизонтальный транспортёр
Рисунок 1 – Технологическая схема скреперной установки для уборки помета в птичниках
Функциональная схема автоматизации установки для уборки помёта приведена на рисунке 2.
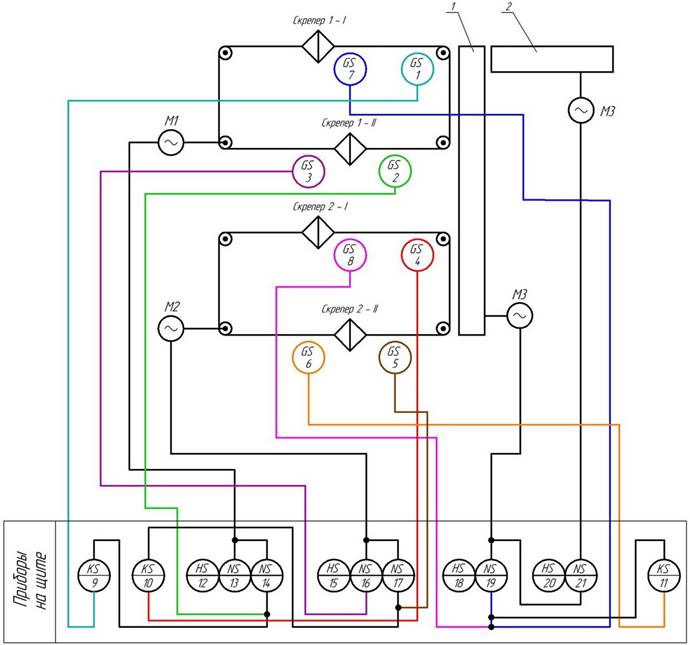
1 – горизонтальный транспортёр; 2 – наклонный транспортёр
Рисунок 2 – Функциональная схема автоматизации скреперной установки
Запуск электродвигателей первой скреперной установки производится вручную. Вначале скрепер
№1 воздействует на конечный выключатель (позиция 7), при этом включаются электродвигатели М3 и М4 наклонного горизонтального транспортера. Когда скрепер дойдет до конечного выключателя (позиция 1), скрепер №1 остановится через выдержку времени, задаваемую реле времени, начнет совершать обратный ход. Когда скрепер №2 воздействует на конечный выключатель (позиция 3), включается электродвигатель М2 второй скреперной установки. Когда скрепер №2 дойдёт до конечного выключателя (позиция 2), первая скреперная установка отключится.
Вторая скреперная установка работает аналогично. Когда скрепер достигнет конечного выключателя (позиция 6), наклонные и горизонтальные транспортёры отключатся через выдержку времени, задаваемую реле времени (позиция 11).
Принципиальная электрическая схема управления скреперной установкой приведена на рисунке 3.
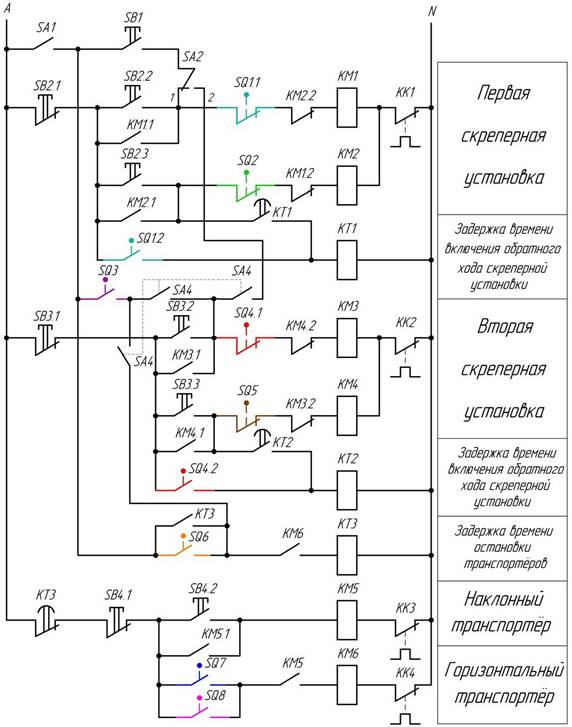
Рисунок 3 – Принципиальная электрическая схема управления скреперной установкой
Функции, выполняемые принципиальной электрической схемой:
– защита от аварийных режимов работы;
– работа схемы в трех режимах: «Ручное управление», «Первая скреперная установка», «Вторая скреперная установка»;
– управление движением скреперов в функции пути;
– включение обратного хода скреперов с выдержкой времени;
– автоматическое включение горизонтального и наклонного транспортеров.
– остановка транспортера с выдержкой времени, необходимой для удаления остатков помёта;
Принципиальная электрическая схема автоматическое и ручное управление. Режим автоматического управления задают при помощи выключателя SА2 и SА4 вводят в работу одну из скреперных установок или же обе поочерёдно.
Для поочерёдного включения скреперных установок выключатель SА2 устанавливают так, чтобы замкнулась цепь 1-2, а выключатель SА4 замыкают цепи 3-4, 5-6 и 7-8. Нажав кнопку SВ1, подают питание на катушку магнитного пускателя KМ1, который включит первую скреперную установку, причём скрепер 1-Ι начнёт рабочий ход, а скрепер 1-ΙΙ- холостой. Дойдя до конечного выключателя SQ7, скрепер 1-Ι замкнёт его, в результате чего магнитные пускатели KМ5 и KМ6 включат электродвигатели приводов наклонного и горизонтального транспортёров. Затем в конце пути срабатывает конечный выключатель SQ1, который лишает питания магнитный пускатель KМ1 и вводит в цепь тока реле времени KТ1. Через 5…8 с это реле замкнёт цепь пускателя KМ2; скреперная установка отрабатывает обратный ход.
При обратном ходе скрепер 1-ΙΙ воздействует на конечный выключатель SQ3, контакты которого замыкаются и включают вперёд вторую скреперную установку. Первая установка отключается по команде от конечного выключателя SQ2 через некоторое время после включения второй.
Вторая скреперная установка действует в целом аналогично первой.
В конце её работы по сигналу конечного выключателя SQ6 включается реле времени KТ3, которое разомкнёт с выдержкой времени, необходимой для удаления помёта с горизонтального и наклонного транспортёров, свой контакт в цепи пускателей KМ5, KМ6. Транспортёры останавливаются. Схема готова к следующему циклу.
Конечные выключатели SQ3, SQ6, SQ7 и SQ8 снабжены специальными устройствами, благодаря которым положение их контактов меняется только при рабочем ходе скреперов. При ручном управлении действуют при помощи кнопок SВ2,…,SВ9.
|
|
Видеоматериалы к занятию |
При производстве куриных яиц механизируют следующие операции: извлечение яиц из гнёзд или клеток, транспортировку их в служебное помещение, отбраковку, чистку, сортировку по весу и упаковку. Технологическая схема имеет вид (рисунок 1):
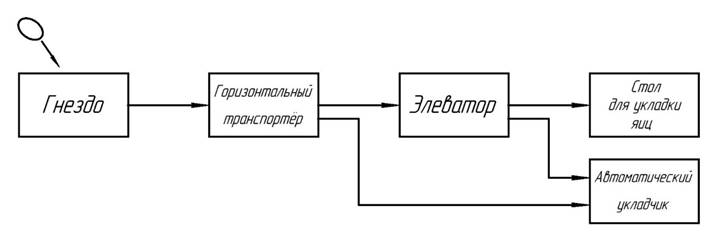
Рисунок 1 – Технологическая схема сбора яиц
После сноса яйца по днищу гнезда скатываются на горизонтальный транспортёр. Автоматическое открывание и закрывание гнёзд позволяет освободить птичницу от работы рано утром и поздно вечером.
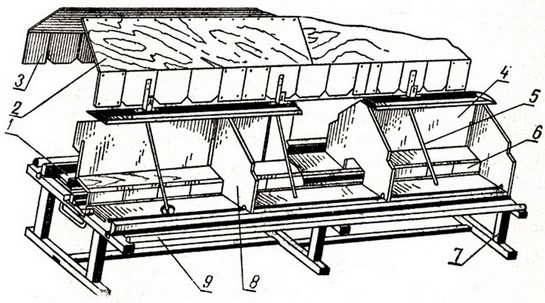
1 – яйцесборный транспортёр; 2 – крыша; 3 – входная шторка; 4 – перегородка; 5 – подъёмный канатик;
6 – клапан; 7 – основание; 8 – поперечная перегородка; 9 – взлётная полка
Рисунок 2 – Механизированные гнёзда для яйцекладки (комплект «Промышленный»):
Автоматизация открывания и закрывания гнёзд выполнена в функциях времени и пути (остановка электродвигателя привода тягового винта при достижении днища гнезда крайних положений).
Функциональная схема автоматизации закрывания и открывания гнёзд приведена на рисунке 3.
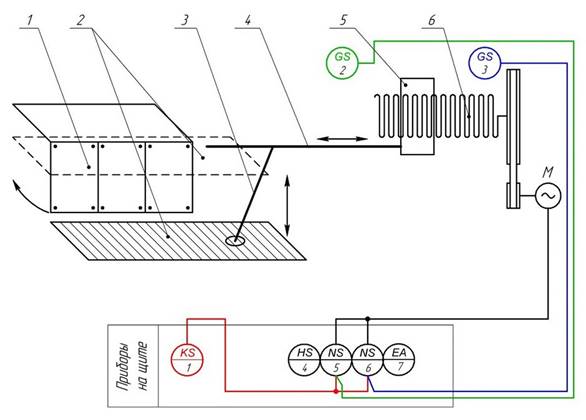
Рисунок 3 – Функциональная схема автоматизации закрывания и открывания гнёзд:
1 – входная шторка; 2 – днище гнезда; 3 – подъёмный канатик; 4 – тяговый канат; 5 – тяговая гайка; 6 – тяговый винт
Принципиальная электрическая схема управления открыванием и закрыванием гнёзд приведена на рисунке 4.
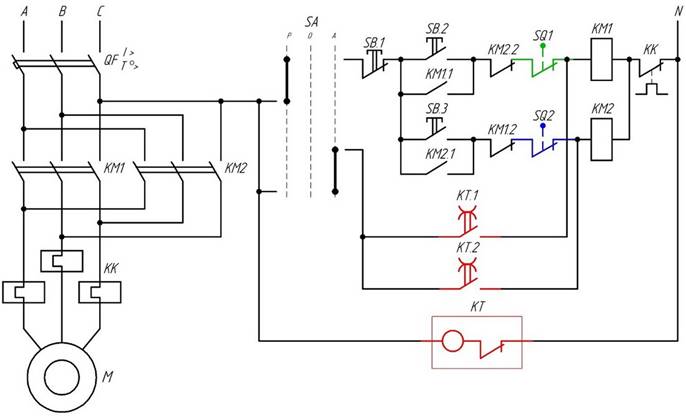
Рисунок 4 – Принципиальная электрическая схема управления открыванием и закрыванием гнёзд
Сбор и укладка яиц производится либо в присутствии птичницы, либо без неё. В первом случае птичница по мере накопления яиц на столе отключает транспортёр, затем после сноса яиц со стола включает транспортёр. Во втором случае яйца поступают либо на приёмно-накопительный стол (ёмкость которого предварительно выбирается и зависит от количества несушек, от суточной яйценоскости, от количества операций сбора яиц за сутки и числа линий сбора яиц в птичнике), либо на автоматический укладчик.
Рассмотрим структурную схему автоматизации отключения транспортёра (рисунок 5).
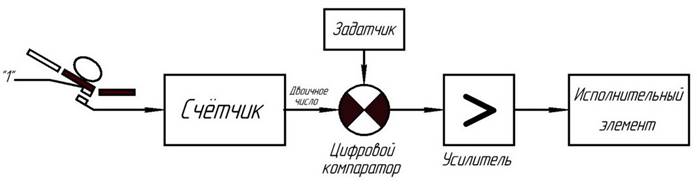
Рисунок 5 – Структурная схема автоматизации отключения транспортёра
Яйцо перед поступлением на стол воздействует на контакт, замыкая и вновь по мере удаления размыкая его. При этом на счётчик, собранный на T-триггерах, поступает сигнал логической единицы. Счётчик суммирует число замыканий контактов и выдаёт это число на выходы в двоичном коде. Данный сигнал поступает на цифровой компаратор, выполняющий функцию элемента сравнения.
Заранее задатчиком задаётся число яиц, которое поместится на столе, в двоичном коде. Это число также поступает на компаратор. При равенстве накопленных яиц заданному значению цифровой компаратор выдаёт сигнал на усилитель, а затем на исполнительный элемент, отключающий транспортёр.
На крупных птицеводческих предприятиях укладка яиц в тару производится автоматически. Рассмотрим работу укладчика яиц (рисунок 6).
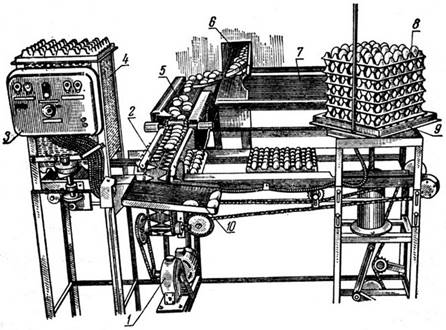
Рисунок 6 – Внешний вид автоматического укладчика яиц
Яйцесборный транспортёр 9 (рисунок 7) подаёт яйца на роликовый ориентатор, и он поворачивает их острым концом в одну сторону. Ориентированные яйца поступают на ячеистый транспортёр. После заполнения пяти его ячеек выдвигается заслонка механизма укладки яиц, и они опускаются в тару острым концом вниз. После этого тара смещается на один ряд. Заполненная прокладка подаётся к стопирующему устройству, в котором набирается от двух до десяти прокладок. Собранная стопа автоматически подаётся на транспортёр. В процессе накопления стопы (комплекта) прокладки автоматически поворачиваются на угол 90° в соответствии со схемой их сборки.
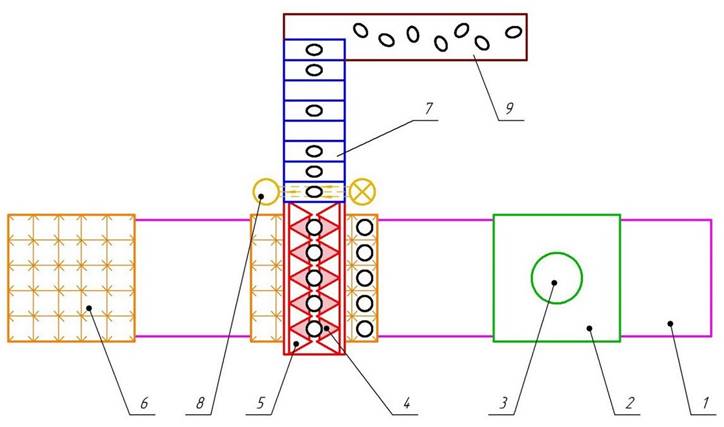
1 – транспортёр заполненной тары; 2 – накопитель заполненной тары; 3 – стопирующее устройство;
4 – укладывающий механизм; 5 – ячеистый механизм; 6 – магазин порожней тары; 7 – ориентатор;
8 – фотореле прохода яйца; 9 – яйцесборный транспортёр
Рисунок 7 – Структурная схема автоматического укладчика яиц
Линии обработки яиц «ЛОЯ» предназначены для автоматической мойки, сушки, овоскопирования, сортировки яиц по массе, маркировки и укладки (ручной) в ячеистую тару. В комплектах предусмотрены: ручные перекладчики яиц, приемные транспортеры, установки для мойки яиц, устройства для овоскопирования, счётчики, механизмы для сортировки и маркировки, выносные транспортеры, приемные столы и электрооборудование.
На современных автоматизированных яйцескладах линии обработки яиц соединяют с клеточными батареями при помощи магистральных яйцесборных конвейеров. С магистрального конвейера яйца на обработку поступают неорганизованно, сплошным или неравномерным потоком, а подаваться на линию обработки должны организованно, равномерно, в несколько рядов. Для распределения неорганизованного потока яиц по рядам и равномерной подачи яиц на линию обработки применяют специальные регуляторы-формирователи рядов, схемы которых показаны на рисунке 8.
Регулятор установлен между яйцесборным и приёмным многорядным конвейерами линии обработки яиц. Регуляторы, состоят из параллельных транспортёров. Благодаря встречному движению среднего и крайних транспортеров образуется циркуляция яиц при их избытке в потоке подачи. За счёт этой регулирующей массы яиц поддерживается питание многорядного транспортера и равномерное заполнение всех его рядов.
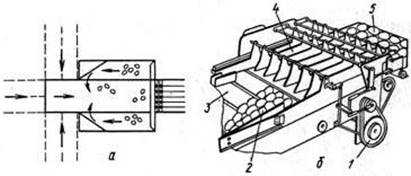
1 – привод, 2 – неорганизованный поток яиц, 3 – магистральный транспортёр, 4 – делители рядов,
5 – шестирядный транспортёр и поток яиц
Рисунок 8 – Схема регуляторов подачи яиц на линию обработки: а – с транспортерами встречного движения; б – с делителями рядов
Линия для обработки яиц ЛОЯ-4 (рисунок 9) предназначена для очистки яиц от загрязнений, сортировки по массе, укладке сортированных яиц в тару и выноса прокладок с уложенными яйцами на транспортёр сбора яиц.
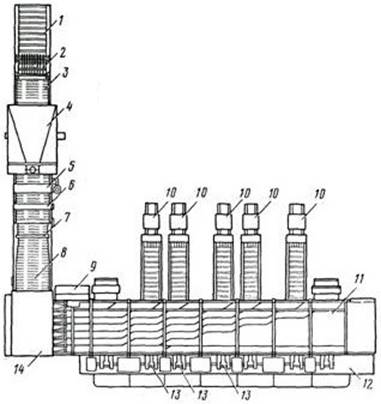
Рисунок 9 – Схема линии обработки яиц «ЛОЯ-4»
Линия состоит из следующих основных сборочных единиц и агрегатов: загрузочного транспортера 1 с формирователем 2 и собственным приводом; яйцемоечной машины 4 с ванной для раствора и транспортёра 3, камеры сушки 5, блока консервации 6 с насосом, яйцесортировочного агрегата 14 с овоскопирующим устройством 8, распределительного транспортёра 11, автоматов укладки яиц 10, транспортёра выноса тары с яйцами 13, транспортёра сбора упакованных коробок 12, пульта управления 9.
Яйцемоечная машина состоит из трёх камер обмыва, двух блоков щёток с 12-рядным роликовым конвейером и ёмкости для моющего раствора.
Агрегат сортировки яиц предназначен для овоскопирования, автоматической сортировки по массе на семь категорий, учета общего количества рассортированных яиц и отдельно по каждой категории. Он состоит: из приемного транспортёра, овоскопа, датчиков общего счета яиц, сортировочного устройства, однорядных транспортеров, успокоителей, датчиков учета яиц по категориям и привода.
На раме сортировочного устройства укреплены две несущие боковые стенки. Поперек рамы с шагом 200 мм установлены последовательно семь металлических желобов; на шести первых укреплены 12 весов с автоматикой сбора яиц. Во всех семи желобах перемещаются однорядные транспортеры с закрепленной на них в виде гофр дерматиновой лентой. Привод всех семи однорядных транспортеров осуществляется одним валом от привода сортировки. На выходе каждого транспортера, на общем валу установлены успокоители, представляющие собой диски из поролона диаметром 200 мм. Здесь же имеются фотодатчики учета яиц по категориям (после сортировки).
Весовой механизм механического типа представляет собой металлическое коромысло, на одном конце которого закреплен противовес, на другом – щёчки весов с автоматикой сброса. Необходимое взаимодействие деталей весов достигается регулировкой арретирами. Для сокращения времени успокоения весов коромысло снизу подпружинено. Давление пружины на коромысло регулируют винтом.
С переходного мостика приемного транспортера яйца перемещаются на весовые аппараты устройством переноса, представляющим рейку с вильчатыми гнездами, установленную на плавающих зубчатых венцах, приводимых в движение от шестерён. Привод всех механизмов сортировального агрегата и транспортера мойки осуществляется от одного электродвигателя через редуктор. Число оборотов двигателя, а, следовательно, и производительность линии изменяют вручную через электровариатор.
Автоматы укладки яиц, из которых два сдвоенных и один одиночный, укомплектованы каждый:
приемным транспортером, собственно укладчиком, магазином прокладок, механизмом клеймения яиц и транспортером выноса уложенных яиц. Привод на все автоматы осуществляется от одного электродвигателя через вал трансмиссии.
Технологический процесс работы линии осуществляется следующим образом. На линию ЛОЯ-4 яйца из птичников транспортером автоматически подаются на цепочно-планчатый транспортер загрузки и далее к формирователю. На формирователе, совершающем вертикальное возвратно-поступательное движение, яйца из сплошного потока формируются в 12 рядов и укладываются при выходе из него на 12рядный роликовый транспортер моечной машины. Этим транспортером яйца переносятся последовательно через все камеры моечной машины.
В камере замочки яйца замачиваются подогретой (40…45°С) водой, подаваемой через форсунки центробежным насосом. После замачивания яйца щётками, совершающими возвратно-поступательное движение поперек хода яиц, интенсивно очищаются от загрязнений. При этом в зону контакта щёток с поверхностью яйца по трубам и форсункам подается подогретая вода. Яйца при очистке непрерывно вращаются за счёт сцепления с вращающимися роликами транспортера моечной машины. Из первой камеры очистки яйца поступают во вторую камеру, где второй блок щёток дочищает яйца. В третьей камере яйца ополаскиваются и транспортером мойки подаются в камеру сушки, где обдуваются тёплым воздухом и сушатся. После сушки яйца тем же транспортером переносятся в камеру консервации. Здесь на яйца наносят плёнку из консервирующего раствора. При выходе из камеры консервации яйца автоматически перекладываются на 12-рядный роликовый транспортер овоскопирующего устройства, который переносит их в зону счётчиков, где подсчитывается общее количество яиц, и далее в зону овоскопирования. В зоне овоскопирования яйца просвечиваются световым потоком от ртутно-кварцевых ламп, а операторы вручную отбирают яйца с трещинами, кровяными включениями и др. Для лучшего просмотра специальный шестеренный механизм поворачивает ролики транспортера в зоне овоскопирования на 1,5…2 оборота в семи фиксированных положениях.
С овоскопирующего транспортера яйца, уложенные на чашечки реек переноса яйцесортировочной машины, подаются последовательно на каждый ряд весовых механизмов. Каждый ряд весовых механизмов настроен на определенную массу.
В первом ряду весовых механизмов отделяются яйца высшей весовой категории, у которых масса соответствует настройке. Более легкие яйца посредством реек переноса перекладываются на последующие ряды весовых механизмов, пока не достигнут ряда, на котором их масса соответствует данной весовой категории. Все взвешенные яйца и последние не взвешенные, но прошедшие все ряды весов, скатываются на гофрированные однорядные распределительные ленточные транспортеры в соответствии со своей категорией. На выходе из яйцесортйровочного агрегата яйца каждой Категории подсчитываются фотоэлектрическими снижается поролоновыми дисковыми успокоителями. Лента распределительного транспортера переносит отсортированные яйца к укладчикам. Специальные направляющие на распределительном транспортере не позволяют яйцам различных категорий перемешиваться между собой при их транспортировании. Цепочно-планчатый транспортер подает яйца в приемное устройство укладчика. После заполнения приёмного устройства шестью яйцами фотоэлемент, контролирующий процесс, включает электромагнитную муфту и шесть яиц передаются на ориентатор, к которому снизу поднимается укладчик с открытыми ячейками. Яйца за счёт вращения валика ориентатора ориентируются острыми концами в одну сторону и скатываются в ячейки укладчика. Одновременно с поднятием укладчика вверх прокладка цепным транспортером перемещается на шаг ячеек. При опускании укладчика яйца автоматически ложатся в прокладку и одновременно маркируются механизмом маркировки. Полностью заполненная прокладка выносится ленточным транспортёром в зону транспортёра упаковки яиц, где оператор вручную укладывает её в картонную коробку. Заполненные ящики ленточным транспортером упаковки переносятся к месту сбора и временного хранения.
Учет пропущенных яиц ведется с помощью фотоэлектрических и электромеханических счётчиков. Управляют процессом с центрального пульта управления. Экстренную остановку всех механизмов линии из любой точки распределительного транспортёра обеспечивает специальная тросовая система, воздействующая на микровыключатель аварийного отключения.

Технологический процесс обработки птицы включает следующие операции:
– приём и навешивание птицы на конвейер;
– оглушение птицы;
– убой и обескровливание;
– ослабление удерживаемости оперения (обработка горячей водой);
– удаление оперения;
– полупотрошение и потрошение тушек;
– туалет и формовка тушек;
– сортировка и маркировка тушек;
– упаковка тушек и маркировка ящиков;
– фасовка тушек;
– холодильная обработка мяса; – транспортировка мяса.
На убой птицу принимают по количеству живой массе.
Птицу навешивают на конвейер (спиной к рабочему), закрепляют ноги в пазах подвески конвейера. Оглушение (анестезирование) птицы производят электрическим током различного напряжения, силы и частоты во время движения её на конвейере.
Различают наружный и внутренний способы убоя. При наружном одностороннем способе убоя птицу берут за голову и на 15-20 мм ниже ушного отверстия перерезают ножом кожу, яремную вену, сонную и лицевую артерии. Во избежание отрыва головы при дальнейшей обработке длина разреза не должна превышать 10-15 мм у кур, цыплят, бройлеров.
При наружном двустороннем способе убоя левой рукой берут птицу за голову, ножом прокалывают кожу на 10 мм ниже ушной мочки. Движение ножа слегка вправо перерезают одновременно правые и левые сонные артерии и яремную вену. Затем прокалывают кожу с противоположной стороны головы для вытекания крови из образовавшегося отверстия. Длина прокола не должна превышать 15 мм.
При внутреннем способе убоя голову птицы берут левой рукой, поворачивают клювом к себе, правой рукой вводят ножницы с остро отточенными концами в ротовую полость и перерезают кровеносные сосуды в задней части нёба над языком, в месте соединения яремной и мостовой вен.
Наружный способ убоя позволяет механизировать и автоматизировать процесс убоя, а также полнее и быстрее обескровливать тушки.
Обескровливают птицу над специальным лотком для сбора крови в течении 90-120 сек (куры, цыплята, бройлеры).
Тушки птицы с помощью горячей воды или паровоздушной смеси подвергают тепловой обработке, режим которой зависит от вида, возраста и состояния оперения птицы.
Оперение с тушек птицы удаляют с помощью пальцевых и гребенчатых машин, бильных, дисковых и центробежных автоматов.
Полупотрошение проводят, не снимая тушки с конвейера, за специальным столом.
Тушку кладут на стол головой от себя брюшком вверх и делают продольный разрез стенки брюшной полости в направлении от клоаки к килю грудной кости. Длина разреза 3-4 см. Затем, придерживая одной рукой тушку, другой извлекают кишечник вместе с клоакой и осторожно отделяют конец двенадцатиперстной кишки от желудка, не допуская разрыва кишечника.
Потрошение проводят на конвейере над системой желобов. Она состоит из основных желобов для приема и транспортировки технических отходов и пищевых субпродуктов (к последнему подведены желоба для транспортировки сердца, печени и шеи) и вспомогательных желобов для потрошения и транспортировки желудков к месту их обработки, для транспортировки разрезанных желудков к машине, удаления кутикулы и для транспортировки жира, снятого с желудков.
Потрошение тушек начинают с отделения ног. Отрезают ноги с помощью специальной машины. При отделении ног вручную тушки берут левой рукой и горизонтальным движением правой руки перерезают ножом кожу и сухожилия ног в заплюсневом суставе.
После ветеринарно-санитарной экспертизы доброкачественные тушки по конвейеру поступают к рабочим местам для отделения внутренних органов. В первую очередь отделяют сердце. Его сжимают левой рукой и отрывают от остальных органов, затем освобождают от околосердечной сумки и сбрасывают в желоб для пищевых субпродуктов.
Печень захватывают левой рукой (пальцы правой руки должны находиться между желчным пузырем и печенью), осторожным движением отрывают от желудочного пузыря, не повреждая его, и сбрасывают в желоб для пищевых субпродуктов.
Оставшиеся при тушке внутренние органы захватывают левой рукой и слегка оттягивают, не отрывая от желудка. Затем их отрезают и сбрасывают в жёлоб для отходов. Желудок сбрасывают в желоб, по которому он направляется для разрезания, мойки и удаления с него кутикулы.
После удаления из тушки внутренних органов голову освобождают из подвески, отрезают по второй шейный позвонок при помощи автомата или вручную ножом.
Для удаления зоба, трахеи и пищевода тушку поворачивают спинкой к рабочему. С левой стороны (примерно на 3-5 см выше места соединения шеи со спиной) сверху вниз делают продольный разрез кожи, шеи, отделяют трахею и пищевод с зобом, затем сбрасывают их в желоб для технических отходов. От шеи оделяют кожу и заправляют её на крыло. Шею отделяют от тушки на уровне плечевых суставов специальным дисковым ножом или вручную, удерживая её левой рукой, а правой отрезая у основания, и сбрасывают в соответствующий желоб.
Затем у тушек удаляют легкие и почки специальным аппаратом и далее тушки поступают на бильно-моечную машину, предназначенную для мойки и удаления посторонних частиц с внешней стороны тушки. После бильно-моечной машины тушки доставляют на линию охлаждения, состоящей из нескольких охладителей, в которых тушки охлаждают холодной водой до температуры 1°С.
Охлаждение осуществляется следующим образом - тушки в охладителе увлекаются потоком воды и поступают во вращающиеся барабаны, где переворачиваются и продвигаются в зону наклонного пластинчатого транспортера, перегружающего тушки из одного охладителя в другой.
Для стекания воды охлажденные тушки вручную навешивают на конвейер.
Головы и ноги используют на пищевые цели или для производства сухих белковых кормов. Технические отходы (кишки, кутикулу, зоб, трахея, пищевод, яйцевод, яичник, железистый желудок, селезенка, семенники), а также легкие и почки используют для производства сухих белковых кормов.
Туалет тушки птицы заключается в мойке её снаружи и изнутри. Кроме того, удаляют нитевидное перо и очищают у полупотрошеных тушек полость рта и клюв от остатков крови.
При формовке полупотрошеных тушек птицы складывают крылья и прижимают их к бокам, голову с шеей подвертывают на бок к крылу. Ноги, согнув в заплюсневых суставах, прижимают к груди.
Для обмыва тушек снаружи применяют бильно-очистную машину и душ, для мойки изнутри используют шланги с насадками.
Тушки птицы, кроме индивидуально упакованных в пакеты из полимерной пленки, маркируют нанесением электроклейма или наклеиванием этикеток. Электроклеймо (соответственно категориям) наносят на наружную поверхность голени одной ноги тушек.
Бумажную этикетку розового цвета для I категории и зеленого для – II наклеивают на ногу полупотрошеной тушки ниже заплюсневого сустава, а потрошеной – выше заплюсневого сустава.
При упаковке тушек птицы в пакеты из термоусадочной пленки пакеты вакуумируют на вакуумноупаковочной машине и зажимают алюминиевой скрепкой. Горловина пакета с тушкой без вакуумирования может быть скреплена липкой лентой. Лишнюю часть горловины пакета отрезают на расстоянии от 1 до 1,5 см от места зажима. Пакеты с тушками транспортером подают в термоусадочную камеру, где пленка подвергается усадке при температуре от 96 до 200 °С.
Тушки птицы, сгруппированные по видам, категориям упитанности и способу обработки, укладывают в дощатые (деревянные) ящики, коробки (ящики) из гофрированного картона или многооборотную тару (ящики из нержавеющего металла), а также ящики из полимерных материалов для упаковки бройлеров. Ящики с уложенной птицей передают на маркировку. Маркируют торцевые стенки ящиков с помощью трафарета не пахнущей краской или наклеивают бумажную этикетку (ярлык).
Транспортируют фасованное мясо птицы в условиях, обеспечивающих сохранность его качества, с нанесением манипуляционного знака «Скоропортящийся груз».
Охлаждённое фасованное мясо птицы хранят при температуре 1±1°С, а мороженое мясо птицы – не выше – 12°С (относительная влажность воздуха 90±5%).
Сроки хранения и реализации фасованного мяса птицы составляют: тушки охлажденные – 72 ч, мороженые – 3 мес; полутушки и четвертинки – соответственно 48 и 2.
Срок хранения охлажденного фасованного мяса птицы на предприятии-изготовителе – не более 12 ч.
Рисунок 1 – Внешний вид поточных линий убоя и обработки птицы
Контрольные вопросы и задания
1. Технологические операции по убою и обработке птицы. 2. Способы убоя птицы. 3. Обескровливание птицы и удаление оперения. 4. Потрошение птицы. 5. Формовка тушек. 6. Упаковка готовой продукции. 7. Хранение готовой продукции
ТЕМА 2.4 АВТОМАТИЗАЦИЯ
КОРМОПРОИЗВОДСТВА
Витаминно-травяная мука – это ценный белково-витаминный продукт, полученный путём искусственной сушки и дробления свежескошенных трав. Искусственная сушка свежескошенной травы в высокотемпературных сушильных агрегатах позволяет в максимальной степени (до 95 %) сохранить пищевые достоинства данного корма. В результате быстрого обезвоживания зеленой массы до минимума сокращается период деятельности микроорганизмов и ферментов растений, вызывающих потери питательных веществ, содержащихся в сухом веществе травы. Травяная мука представляет собой высушенную и размолотую траву. Сырьём для изготовления травяной муки является молодая зеленая трава люцерны, клевера, эспарцета, кормового люпина и злаково-бобовых смесей. Травяную муку используют в качестве белково-витаминной добавки к кормам для всех видов сельскохозяйственных животных. В рационах крупного рогатого скота ею можно заменить до 40 % зерновых концентрированных кормов.
Агрегаты для приготовления травяной витаминной муки сушат траву (измельчённую при скашивании силосоуборочным комбайном) и другие материалы (жом, листья, хвою, зерно), превращая их в муку. В хозяйствах нашей страны эксплуатируют несколько типов агрегатов витаминной муки (АВМ) производительностью 0,4...3 т/ч.
Такие установки отличаются высокой энергоемкостью (от 210 до 300 кг жидкого топлива и от 120 до 150 кВт∙ч электроэнергии на каждую тонну муки). Вследствие этого автоматизация технологических процессов позволяет получить травяную муку высокого качества и снизить удельный расход энергии на её производство.
Агрегат представляет собой поточную линию, состоящую из транспортёров, сушильного агрегата, дробилок. Привод механизмов осуществляется трёхфазными асинхронными короткозамкнутыми электродвигателями.
Продукты перед сушкой измельчают (длина частичек должна быть от 30 до 40 мм при толщине от 1 до 4 мм) и высыпают в лоток 1 конвейера загрузчика зелёной массы (рисунок 29.1). Сушат в барабанной сушилке 5, куда из теплогенератора 4 засасывается нагретый до высокой температуры воздух и продукты сгорания жидкого топлива.
Кормовая масса транспортируется конвейером 2, транспортёром 3 и вращающимся барабаном сушилки 5. Жидкое топливо подаётся насосом 15 (рисунок 29.2) и впрыскивается форсункой 17 в камеру газификации топки под давлением 1,2 МПа. Сюда же поступает воздух от вентилятора 12. Смесь воздуха и топлива воспламеняется от искры, создаваемой трансформатором зажигания. Топочные газы, перемешиваясь с воздухом и травяной сечкой, засасываемыми вентилятором 7 циклона 6 сухой массы, образуют теплоноситель температурой 250...300 °С при получении зернофуражной муки и до 900 °С при сушке травяной муки.
Сушильный барабан 5 загружают через горловину при помощи конвейерных транспортёров 3 и 2. Сушильный барабан, состоящий из соединенных в одно целое трёх концентрических цилиндров, вращается на роликах при помощи электропривода М3. К внутренней части каждого цилиндра приварены лопасти для ворошения и перемещения высушиваемой массы в потоке теплоносителя. Сухая масса увлекается потоком газов, который создаётся вентилятором 7 большого циклонного охладителя 6. Из большого циклона высушенный продукт через дозатор 6 попадает в дробилки 9, 10. По пути под действием центробежных сил от неё отделяются в камнеуловителе 16 твёрдые включения (камни, металлические предметы). Дробилка превращает высушенную массу в муку, которая за счёт потока, создаваемого вентиляторами 11, 12, перемещается в малые циклоны, а затем затворами-дозаторами в шнековый разгрузчик 13, из которого её можно направлять в отделение гранулирования или затаривать в мешки.
Функциональная схема автоматизации агрегата АВМ-1,5 приведена на рисунке 29.1.
Рисунок 29.1 – Функциональная схема автоматизации агрегата АВМ-1,5
Функциональная схема автоматизации управления температурой топлива и теплоносителя приведена на рисунке 29.2.
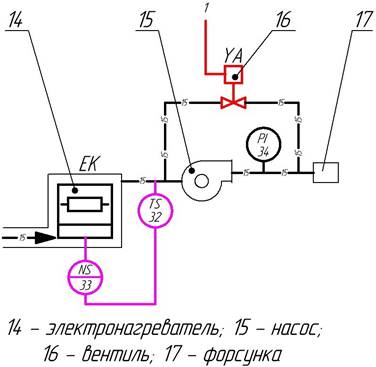
Рисунок 29.2 – Функциональная схема автоматизации управления температурой топлива и теплоносителя
Система автоматического управления агрегатом АВМ-1,5 выполнена в функциях уровня, температуры, времени и освещённости. Системой автоматизации предусмотрена возможность запуска в следующей последовательности: М4, М8, М9, М10 → М6, М7 → М5. При заполнении большого циклонного охладителя 6 продуктом до заданного значения датчик уровня (позиция 1) подаёт сигнал исполнительному механизму (позиция 3), который даёт команду на отключение электродвигателей механизмов агрегата. В системе управления сушилкой запуск М3 возможен только после запуска М4, дальнейшая последовательность запуска: М12 → М2, М11 → М1. При отсутствии пламени в топке от фотодатчика контроля пламени (позиция 2) поступает сигнал на реле времени (рисунок 29.2, позиция 31), которое через заданный промежуток времени отключит электродвигатель М11 топливного насоса. В циклоне 6 происходит отделение высушенной массы от потока топочных газов. Температура выбрасываемых газов контролируется датчиком (позиция 3). При её снижении происходит открытие электромагнитного клапана YA вентиля, установленного на обратном трубопроводе. Температура топлива, подаваемого насосом в топку, поддерживается на уровне 75 °С при помощи термодатчика (позиция 32), подающего сигнал на исполнительный механизм (позиция 33), управляющий электронагревателем. Давление топлива перед форсункой контролируется манометром (позиция 34).
Принципиальная электрическая схема управления АВМ-1,5 предусматривает включение и отключение тринадцати асинхронных электроприводов механизмов. Она выполняет следующие функции:
– защита сети от аварийных режимов работы;
– обеспечение запуска электродвигателей механизмов в последовательности, заданной технологическим процессом, посредством простой зависимой блокировки;
– отключение электродвигателей механизмов при заполнении большого циклонного охладителя продуктом до заданного значения;
– отключение трансформатора зажигания и электродвигателя топливного насоса при отсутствии пламени в топке;
– открытие электромагнита вентиля обратного трубопровода в топке при увеличении температуры газов на выходе из циклона;
– включение электронагревателя при температуре топлива, подаваемого насосом в топку, ниже 75°С.
Переключателем SA вначале подают звуковой сигнал НА, а затем включают реле KL1. Кнопками «Пуск» SB2.2,...,SB10.2 поочерёдно включают электродвигатели установок в последовательности, обратной технологическому потоку: двигатель М10 шнекового разгрузчика 13 (рисунок 30.1), двигатели М8 и М9 вентиляторов циклонов муки 11 и 12, двигатели М6 и М7 дробилок 9 и 10, двигатель М5 затвора дозатора 8 большого циклона сухой массы, двигатель М4 вентилятора 7, двигатель МЗ сушильного барабана 6, двигатель М12 вентилятора 15 топки.
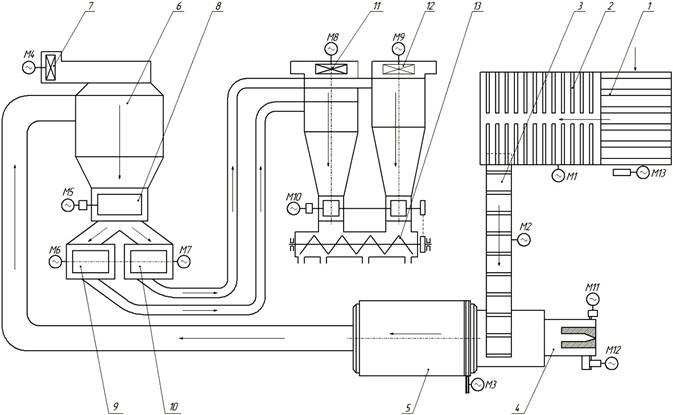
1 – лоток; 2 – конвейер зелёной массы; 3 – транспортёр зелёной массы; 4 – теплогенератор;
5 – сушильный барабан; 6 – большой циклонный охладитель; 7, 11, 12 – вентиляторы; 8 – дозатор;
9, 10 – дробилки; 13 – шнековый разгрузчик
Рисунок 30.1 – Технологическая схема агрегата для приготовления витаминно-травяной муки АВМ-1,5 Принципиальная электрическая схема управления механизмами агрегата АВМ-1,5 приведена на рисунке 30.2.
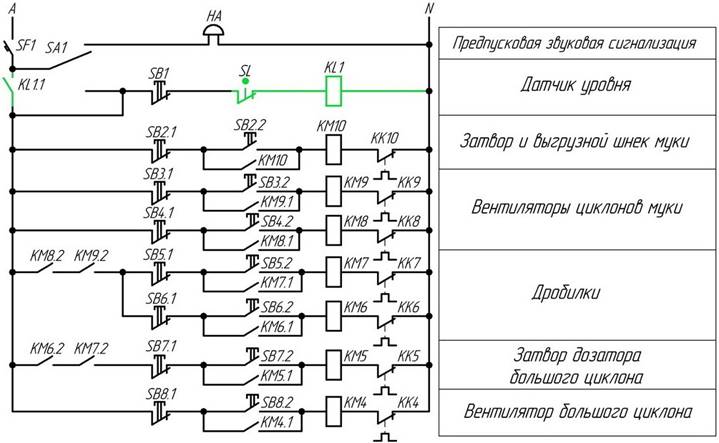
Рисунок 30.2 – Принципиальная электрическая схема управления механизмами агрегата АВМ-1,5
Для зажигания факела в топке необходимо вручную открыть вентиль на баллоне со сжиженным газом и, нажав кнопку SB11.2, запустить двигатель М11 топливного насоса. При этом блок-контакты KМ11.2 магнитного пускателя включают трансформатор зажигания TV и реле выдержки времени KТ. При зажжённом газовом факеле открывают кран топлива и зажигают основной факел. После этого замыкается контакт датчика BL контроля пламени. При невозможности розжига топки (нет пламени) реле KТ при помощи реле KL2 отключает с выдержкой времени двигатель М11 топливного насоса и трансформатор зажигания TV.
При успешном розжиге через некоторое время, когда прогреется топка, включают двигатели М2 и M1 конвейеров подачи сырой массы в топку. Для экстренного отключения всех механизмов нажимают кнопку SB1. Автоматически они отключаются датчиком SL предельного уровня травяной муки в циклонеохладителе 12. В нормальных условиях агрегат останавливают в обратной последовательности кнопками SB13.1, SB12.1, SB9.1,...,SB2.1. Двигатели М12 и М4 вентиляторов топки и циклона 6 оставляют включенными до полного остывания топки, а затем отключают кнопками SB10.1 и SB8.1.
Принципиальная электрическая схема управления сушилкой приведена на рисунке 30.3.
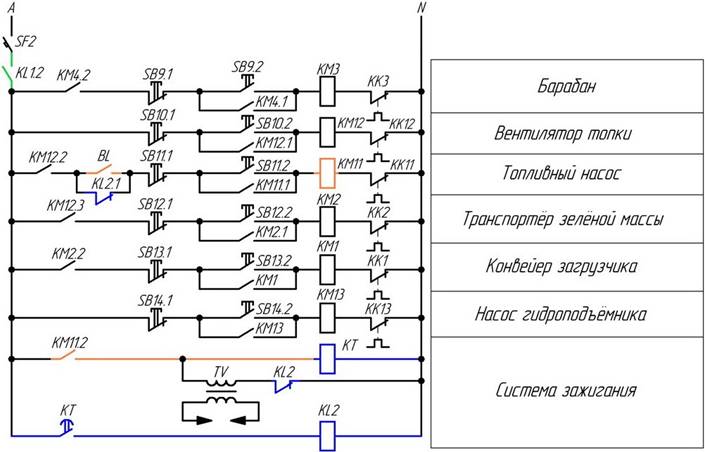
Рисунок 30.3 – Принципиальная электрическая схема управления сушилкой
Процесс сушки ограничен только управлением температуры. Температуру теплоносителя на входе устройства регулируют по температуре газов на выходе из циклона 6, изменяя подачу топлива к форсунке. При увеличении температуры газов переключаются контакты датчика температуры BK, которые включают реле KL3 и электромагнит YА вентиля 16 (рисунок 30.4), установленного на обратном трубопроводе. Вентиль 16 открывается, и часть топлива, засасываясь насосом 15 через вентиль обратно, не попадает в форсунку 17.
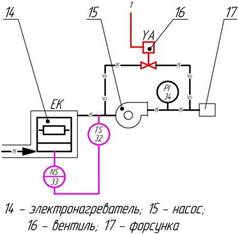
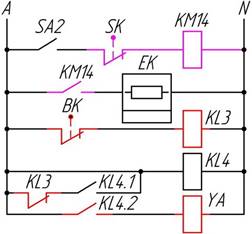 а
б
а
б
Рисунок 30.4 – Технологическая (а) и принципиальная электрическая (б) схемы управления температурой топлива и теплоносителя
Интенсивность горения уменьшается, и температура снижается до минимального значения, при котором контакты термодатчика BK возвращаются в исходное положение и при помощи реле KL3 отключают электромагнит YА через реле KL2. Теперь всё топливо проходит через форсунку. Температура увеличивается.
Температура топлива, подаваемого насосом в топку, поддерживается на уровне 75 °С при помощи термодатчика SK, управляющего электромагнитным пускателем KM электронагревателя EK.
Приготовление и использование различных видов комбикормов, травяной муки и другого фуражного сырья в виде измельченной россыпи имеет целый ряд недостатков, ухудшающих качество кормов. Для того, чтобы устранить эти недостатки, комбикорма и другой рассыпной фураж целесообразно прессовать в плотные брикеты или гранулы, имеющие большую устойчивость при хранении и в 2…3 раза большую плотность по сравнению с рассыпными. Брикетированные и гранулированные кормовые смеси меньше распыляются при перегрузке, улучшается транспортабельность корма, сокращается потребность в складских помещениях. В гранулах и брикетах равномерно распределяются, дозируются и закрепляются все ингредиенты, что исключает их самосортирование при перевозке. Это повышает эффективность использования кормов в расчёте на единицу получаемой животноводческой продукции. Однородные по составу, размерам и плотности, эти корма можно раздавать по кормушкам любыми серийно выпускаемыми кормораздатчиками. Особенно важно то, что в брикеты и гранулы можно добавить солому и полову, которые являются грубыми кормами. Гранулирование и брикетирование позволяет сохранять вещества и свойства всех видов кормов.
Агрегат ОПК-2 предназначен для гранулирования и брикетирования концентрированных, сочных и грубых кормов. Данный агрегат представляет собой поточно-транспортную линию, содержащую 15 различных машин и механизмов (рисунок 31.1).
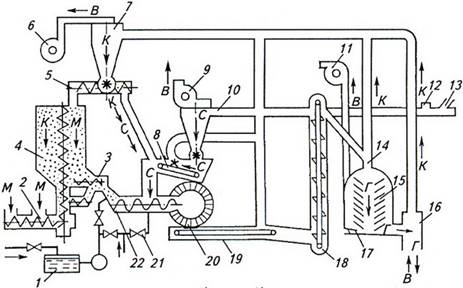
1 – бак; 2 – шнековый транспортёр; 3 – дозатор; 4 – бункер; 5, 8 – транспортёры; 6, 9, 11 – вентиляторы;
7, 10 – циклоны; 12 – шлюзовой затвор; 13 – заборник; 14, 16 – камеры соответственно предварительного и окончательного сортирования; 15 – охладительная колонка; 17 – вибровыгрузитель; 18 – нория;
19 – ленточный транспортёр; 20 – пресс; 21 – паропровод; 22 – смеситель-питатель
Рисунок 31.1 – Технологическая схема процесса прессования кормов оборудованием типа ОПК-2
При гранулировании травяная мука загрузочным шнеком 2 (рисунок 31.1) подаётся в накопительный бункер 4. Из бункера дозатором 3 она равномерно подаётся в смеситель-питатель 22, в котором увлажняется водой и паром и непрерывно поступает в прессовальную камеру. Здесь корм затягивается между вращающимися матрицей и прессующими вальцами и продавливается через радиальные отверстия кольцевой неподвижной матрицы 20, где под действием большого давления формируются гранулы. Выдавленные из отверстий гранулы обрезаются ножницами и направляются к выгрузной горловине кожуха пресса и далее ленточным транспортёром 19 подаются в норию 18.
Функциональная схема автоматизации агрегата ОПК-2 приведена на рисунке 31.2.
Рисунок 31.2 – Функциональная схема автоматизации агрегата ОПК-2
Нория загружает гранулы в охладительную колонку 15. Здесь в камере предварительного сортирования 14 воздушным потоком, создаваемым вентилятором 11, от них отделяются пылевидные частицы, крошка и непрессованный продукт. Окончательное отделение происходит в камере окончательного сортирования 16. Все эти лёгкие фракции оседают в циклоне и шнековом транспортёре 5. Этим транспортёром они возвращаются в накопительный бункер и поступают на повторное гранулирование. Готовые гранулы выгружаются из камеры при помощи вибровыгрузителя 17.
При брикетировании кормовых смесей из сечки, соломы, комбикорма и добавок соломенную сечку вводят в поток травяной муки через шлюзовой затвор заборника сечки. Из циклона транспортёр подаёт массу в смеситель-питатель 22, при этом используется пресс для брикетирования. Подача воды производится из бака 1 по трубопроводу при помощи распылителя. Пар подводится через паропровод 21.
Система автоматического управления агрегатом ОПК-2 выполнена в функциях уровня, давления и времени. Для предотвращения забивания накопительного бункера кормом в этом бункере устанавливают датчики верхнего (6у) и нижнего (5у) уровней корма, которые при заполнении бункера отключают электродвигатель М1 загрузочного транспортёра и включают его по мере разбора корма. Уровень воды в баке контролируется при помощи электродных датчиков 1у и 2у, которые воздействуют на электромагнитный вентиль YA3 подачи воды. Подача воды производится при помощи распылителя с насосом, электродвигатель М16 которого можно включить только после включения соответствующих дозатора М12 или транспортёра сечки М13. Подача пара регулируется электромагнитными заслонками YA1 и YA2, которые открыты при включенных дозаторе и транспортёре сечки. Уровень гранул и брикетов в камере выгрузке брикетов и отсоса пыли регулируется при помощи датчиков 3у и 4у, воздействующих на аппаратуру управления электродвигателем М4 вибратора-выгружателя. Для предотвращения забивания смесителя-питателя сечкой предусмотрен конечный выключатель 1к, который в результате давления сечки срабатывает и отключает электродвигатель М13 транспортёра сечки. При забивании пресса твёрдыми предметами конечный выключатель 2к отключает электродвигатели М14 обламывателя гранул и М15 пресса. Реле времени 1t служит для запуска электродвигателя пресса путём переключения со звезды на треугольник.
|
|
Видеоматериалы к занятию |
Электрическая схема управления ОПК-2 предусматривает включение и отключение шестнадцати асинхронных электроприводов механизмов, их защиту и сигнализацию о нормальных и аварийных режимах (рисунки 32.1–32.3).
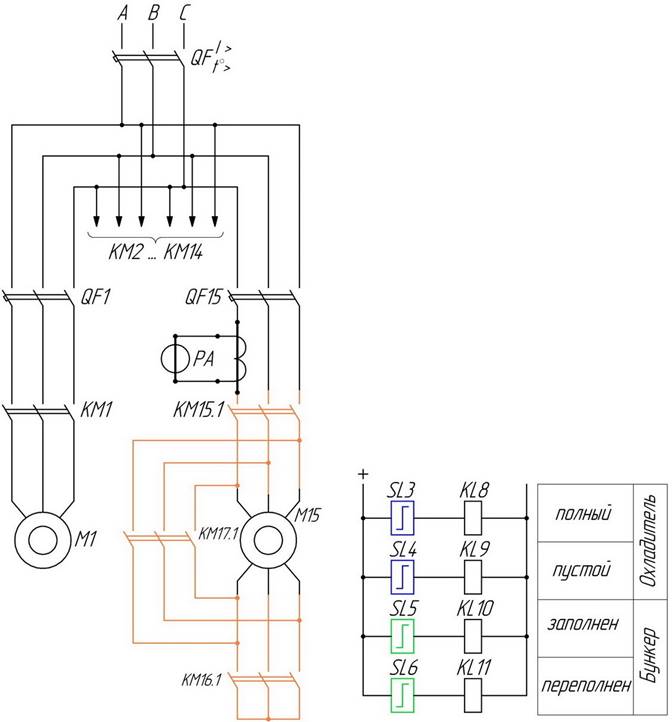 а б
а б
Рисунок 32.1 – Главная цепь принципиальной электрической схемы управления ОПК-2 (а)
и контроля уровня корма (б)
Для облегчения пуска двигателя М15 пресса, мощность которого составляет 90 кВт, предусмотрено его переключение по схеме со «звезды» на «треугольник». Суммарная мощность остальных 15 двигателей не превышает 50 кВт. Электродвигатели к сети подключаются автоматами QF1...QF15, цепи управления защищены автоматами SF16 и SF17.
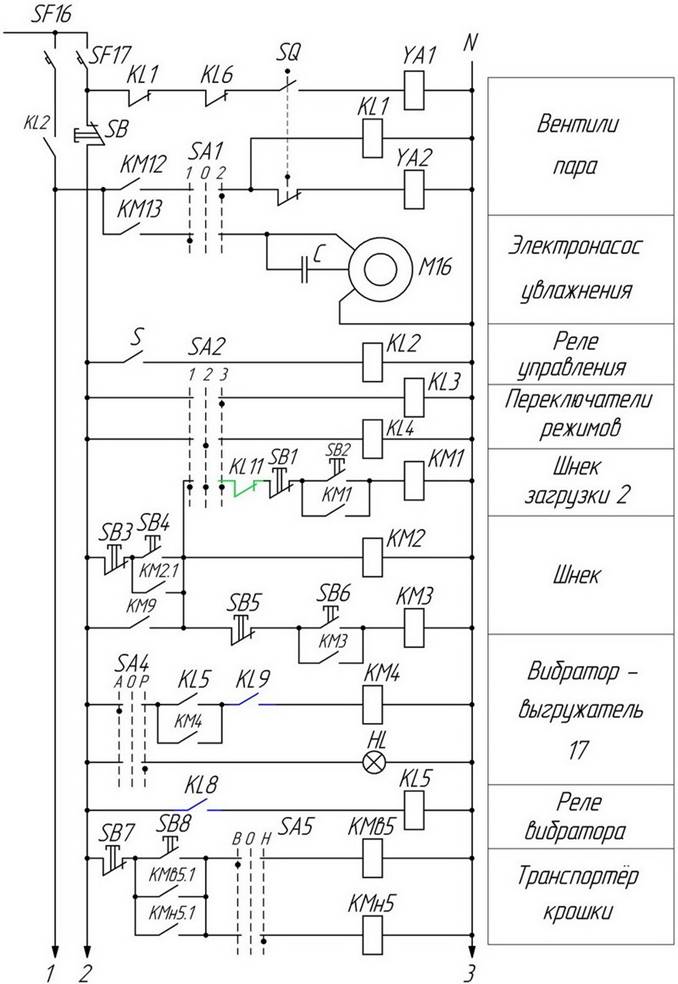
Рисунок 32.2 – Цепь управления принципиальной электрической схемы управления ОПК-2 (часть 1)
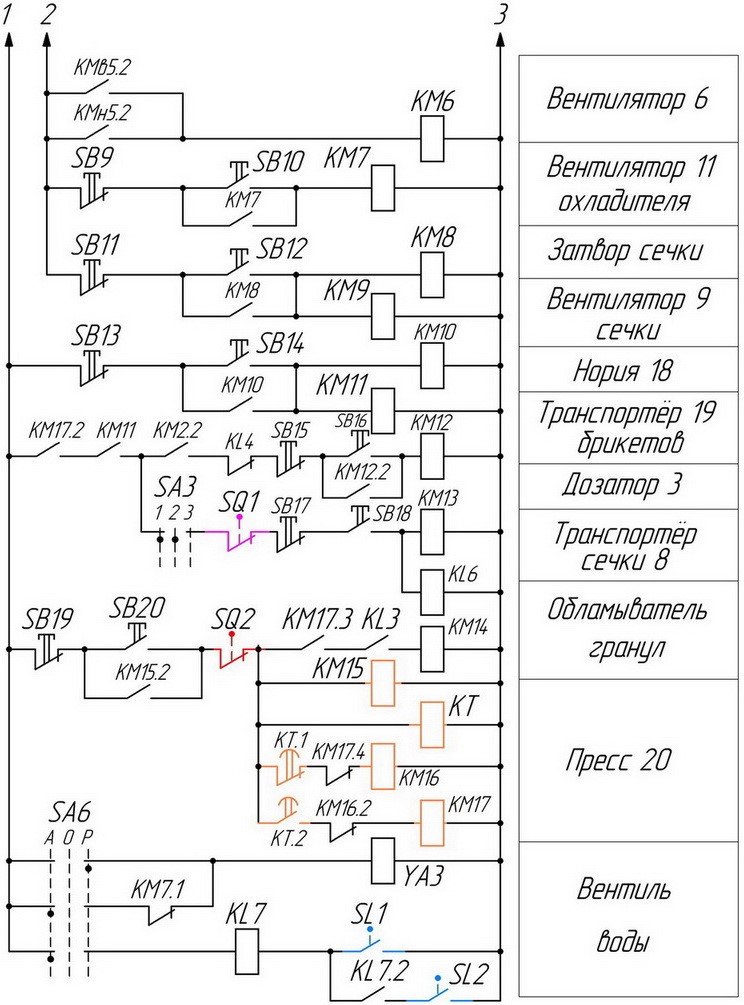
Рисунок 32.3 – Цепь управления принципиальной электрической схемы управления ОПК-2 (часть 2) Пускает и останавливает электроприводы оператор при помощи кнопочных постов SB1...SB20, для экстренного отключения всего оборудования предназначена кнопка SB.
Режим работы выбирают при помощи переключателя SA2: в положение 1 – «Смеси» работают все электродвигатели и брикетируют кормовые смеси, в положении 2 – «Сечка» брикетируют травяную сечку, в положении 3 – «Мука» гранулируют травяную муку или комбикорм. Этим же переключателем переводят схему в режим наладки (на рисунке 32.1, а цепи переключателя, используемые при наладке, а также цепи сигнализации не показаны).
Переключателем SA1 (рисунок 32.1, а) устанавливают вид увлажнения при прессовании корма:
положение 1– «Вода», 2– «Пар». Тумблером S и реле KL2 включают и отключают вторичные цепи. Переключателями SA4 и SA6 устанавливают ручной или автоматический режимы работы соответственно вибровыгружателя 17 спрессованного корма и вентиля YA3, подающего воду на увлажнение корма до 17%.
Уровень исходного сырья в бункере 4 и готового корма в охладителе 15 контролируется бесконтактными датчиками SL3...SL6 (конечные выключатели типа БВК-24), уровень воды в баке для увлажнения – электродными датчиками верхнего SL1 и нижнего SL2 уровня. Перед пуском включают все автоматы, набирают переключателями SA заданный режим работы отдельных узлов, а затем кнопочными постами поочередно включают агрегаты. Например, при гранулировании корма ставят: SA3 – в положение 3 – «Мука», SA1 – в положение 1 – «Вода», SA4 и SA6 – в положение А, SA5 – в положение В, соответствующее транспортированию крошки транспортером 5 в бункер 4. Включают тумблером S реле KL2, которое запитывает остальные цепи управления и сигнализации. При этом открывается электромагнитный вентиль воды YA3. Затем кнопками SB4, SB2, SB14, SB20, SB16, SB8 и SB10 последовательно включают соответственно вертикальный шнек бункера 4, шнек загрузки 2, норию 18 и транспортер брикетов 19, пресс 20, дозатор 3, транспортер 8 крошки и вентилятор 6 сортировки, вентилятор 11 охладителя. Электродвигатель М15 пресса при помощи реле выдержки времени KТ вначале магнитным пускателем KМ 16 включается по схеме «звезда», а затем магнитным пускателем KМ 17 переключается на схему «треугольник». Блок-контактами KМ 17:3 включается магнитный пускатель KМ 14 электропривода обламывателя гранул.
После пуска при помощи заслонки дозатора 3 и вентилей воды вручную устанавливают по амперметру А номинальную загрузку пресса 20.
Если по каким-то причинам уровень сырья в бункере 4 превышает заданное значение, то срабатывает датчик уровня SL6 и выключает реле KL11, которое отключает шнек загрузки 2. При снижении уровня этот же датчик выдает импульс на повторное включение шнека 2.
При заполнении гранулами охладителя срабатывают датчики уровня гранул вначале SL4, а затем SL3. Последний через реле KL8 и KL5 включает привод вибратора выгружателя 17. Разгрузка гранул вибратором продолжается до снижения уровня гранул, при котором датчик SL4 через реле KL9 отключает вибратор.
Уровень воды в баке поддерживается при помощи электродных датчиков SL1 и SL2, реле KL7 и электромагнитного вентиля УАЗ.
Отключают оборудование после закрытия вручную заслонки дозатора 3 и вентиля увлажнителя. Кнопками SB9, SB7, SB15, SB1, SB3, SB19, SB13 отключают соответственно вентилятор охладителя, транспортер крошки и вентилятор сортировки, дозатор, шнек загрузки, шнек бункера, пресс, норию, соблюдая такую последовательность.
При брикетировании травяной сечки или кормосмеси упомянутыми выше переключателями набирают соответствующий режим и кнопками управления включают агрегаты в следующем порядке: шнек бункера 4, шнек загрузки 2, нория 18, пресс 20, транспортер сечки 8, затвор и вентилятор 9 сечки, затвор соломы 12, транспортер крошки, вентилятор 6 сортировки и вентилятор 11 охладителя. Электродвигатель М15 соединен с прессом через предохранительную муфту со штифтами, которые при попадании твёрдых предметов в пресс срезаются. При этом срабатывает конечный выключатель SQ2 и отключает электропривод пресса. Если смеситель-питатель 22 забивается сечкой, то от давления сечки срабатывает конечный выключатель SQ1 и отключает транспортер сечки 8.
Таблица 32.1 – Анализ принципиальной электрической схемы управления агрегатом ОПК-2
|
Позиционное обозначение |
Наименование элемента |
Назначение элемента |
|
QF1–QF15 |
|
|
|
KM1 |
|
|
|
KM2 |
|
|
|
KM3 |
|
|
|
KM4 |
|
|
|
KM5 |
|
|
|
KM6 |
|
|
|
KM7 |
|
|
|
KM8 |
|
|
|
KM9 |
|
|
|
KM10 |
|
|
|
KM11 |
|
|
|
KM12 |
|
|
|
KM13 |
|
|
|
KM14 |
|
|
|
KM15 |
|
|
|
KM16 |
|
|
|
KM17 |
|
|
|
KL1 |
|
|
|
KL2 |
|
|
|
KL3 |
|
|
|
KL4 |
|
|
|
KL5 |
|
|
|
KL6 |
|
|
|
KV7 |
|
|
|
KL8 |
|
|
|
KL9 |
|
|
|
KL10 |
|
|
|
KL11 |
|
|
|
SA1 |
|
|
|
SA2 |
|
|
|
SA3 |
|
|
|
SA4 |
|
|
|
SA5 |
|
|
|
SA6 |
|
|
|
SL1 (в. у) |
|
|
|
SL2 (н. у) |
|
|
|
SL3 (в. у) |
|
|
|
SL4 (н. у) |
|
|
|
SL5 |
|
|
|
SL6 |
|
|
|
SQ1 |
|
|
|
SQ2 |
|
|
|
YA1 |
|
|
|
YA2 |
|
|
|
YA3 |
|
|
|
KT |
|
|
|
S |
|
|
|
A |
|
|
|
HL |
|
|
|
M16 |
|
|
|
SB |
|
|
|
C |
|
|
Функции, выполняемые схемой:
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________;
– ________________________________________________________________________________; – ________________________________________________________________________________; УРОК №33. АВТОМАТИЗАЦИЯ ДОЗИРОВАНИЯ КОРМОВ
Дозаторы предназначены для отмера и выдачи корма в заданном количестве и с заданной точностью, обусловленной зоотехническими требованиями.
Классификация дозаторов:
1. По способу работы:
• порционные, • непрерывного действия.
2. По принципу действия : • объёмные,
• весовые.
3. По конструкции:
• барабанные, • дисковые, • шнековые,
• тарельчатые, • ленточные, • бункерные.
В порционных дозаторах выдача корма производится периодически после отмера порции. В доза- торах непрерывного действия корм подаётся без перерыва. Подача регулируется с помощью различных органов.
Тарельчатый дозатор объёмного дозирования кормов
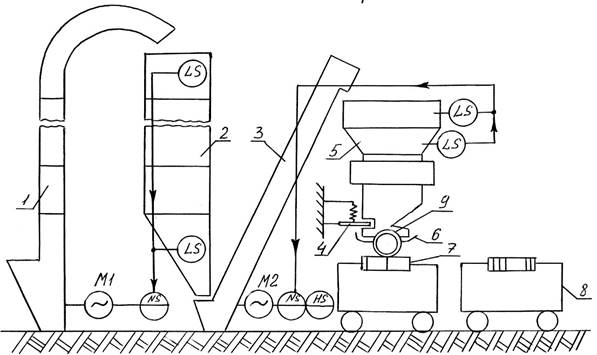
1 – нория; 2 – накопительный бункер; 3 – транспортёр; 4 – пружинная подвеска; 5 – раздаточный бункер; 6 – рабочая тарелка; 7 – дозирующая линейка; 8 – кормушка; 9 – ведущий диск дозатора Рисунок 33.1 – Функциональная схема автоматизации тарельчатого дозатора
Когда кормушка 8 (рисунок 33.1) проходит под дозатором, фрикционный обод ведущего диска 9 дозатора вступает во взаимодействие с поверхностью вертикально расположенных элементов, набранных в дозирующую линейку 7. Продолжительность этого взаимодействия, которая зависит от числа элементов, – и определяет дозу концентратов, поступивших в ту или иную кормушку. Периодически, например, после каждой контрольной дойки, скотник-механизатор приводит в соответствие длину дозирующей линейки с продуктивностью коровы.
Весовой дозатор непрерывного действия
Из бункера 1 (рисунок 33.2) корм непрерывно поступает в кормушки через ленточный транспортёр 2.
Измерение массы корма производится с помощью датчика весов WE. С этого датчика сигнал подаётся на автоматический регулятор WCS, который в зависимости от фактической массы поступающего корма подаёт команду на поднятие или опускание заслонки, приводящейся в движение посредством исполнительного электродвигателя M, тем самым изменяется подача.
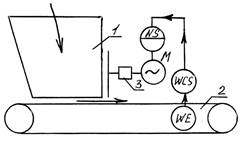
1 – бункер; 2 – транспортёр; 3 – заслонка с механизмом управления Рисунок 33.2 – Весовой дозатор непрерывного действия
Весовой дозатор порционный
В начале взвешивания весовой бункер 2 (рисунок 33.3) поднят гиредержателем 5 вверх, а секторная заслонка 6 полностью открывает отверстие воронки 1, через которое в бункер поступает корм. По мере заполнения бункер постепенно опускается, а заслонка перекрывает выпускное отверстие воронки, пока не упрётся в регулировочный винт. Этот винт обеспечивает определённый зазор между воронкой и заслонкой. Через зазор происходит досыпка корма до заданной массы, после чего заслонка полностью перекрывает выпускное отверстие и одновременно открывается дно бункера. Отвешенная порция корма высыпается, а бункер под действием гиредержателя возвращается в первоначальное положение. При этом автоматически закрывается дно бункера и открывается секторная заслонка, а так как она связана со счётчиком, то последняя регистрирует секцию корма.
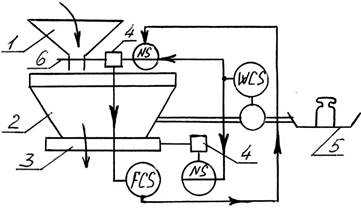
1 – загрузочная воронка; 2 – весовой бункер; 3 – заслонка бункера; 4 – механизмы заслонок;
5 – гиредержатель; 6 – секторная заслонка
Рисунок 33.3 – Весовой дозатор порционный
Смешивание – заключительная операция приготовления кормовых смесей. Чем равномернее распределены одни компоненты среди других, тем выше качество кормов. Смесители кормов по способу смешивания делятся на два типа: периодические (циклические) и непрерывного действия.
Смеситель кормов периодического действия С-12 кроме смешивания производит запаривание кормов низкого качества. В корпусе смесителя навстречу одна другой вращаются две лопастные мешалки. Каждая мешалка состоит из вала, на котором закреплено восемь кронштейнов с лопатками на конце. На концах валов с наружной стороны корпуса закреплены приводные зубчатые колёса.
Для получения кормосмеси заданной влажности в смеситель сначала заливают воду по подведённому водопроводу. Измельчённые компоненты загружают от кормоприготовительных машин в смеситель (на 2/3 его объёма) через загрузочный люк в соответствии с заданным рационом. Мешалки включают тогда, когда объём смесителя заполнится на 30%. Мешалки создают два встречных потока, за счёт которых происходит перемешивание компонентов корма. Смешивание длится 10…15 минут, после чего готовую смесь необходимо сразу же выгрузить.
Функциональная схема автоматизации смесителя кормов С-12 приведена на рисунке 33.4.
Для автоматической выгрузки кормов из смесителя включают электродвигатель исполнительного механизма 1. Шток 2 вместе с клиновой задвижкой 3 поднимается и открывает выгрузную горловину смесителя, при этом рычаг 4 тоже поднимается, натяжение троса 5 снижается, и скользящая полумуфта 7 под действием пружины 8 входит в зацепление с приводной полумуфтой 11 выгрузного шнека 10, которая цепной передачей соединена с главным приводом смесителя. Для того, чтобы полумуфты зацеплялись плавно, без рывков и на полный профиль зубьев, в момент прохождения копиром 12 среднего конечного выключателя GS привод смесителя на время выключается, и звёздочка 9 останавливается. После надёжного зацепления полумуфт копир поднимается, освобождает средний конечный выключатель, включится электродвигатель смесителя, мешалки начнут работать вместе с выгрузным шнеком, начнётся выгрузка корма. Дойдя до верхнего конечного выключателя, копир выключает исполнительный механизм, и шток останавливается. После выгрузки шнек останавливается, и задвижка закрывается в обратном порядке.
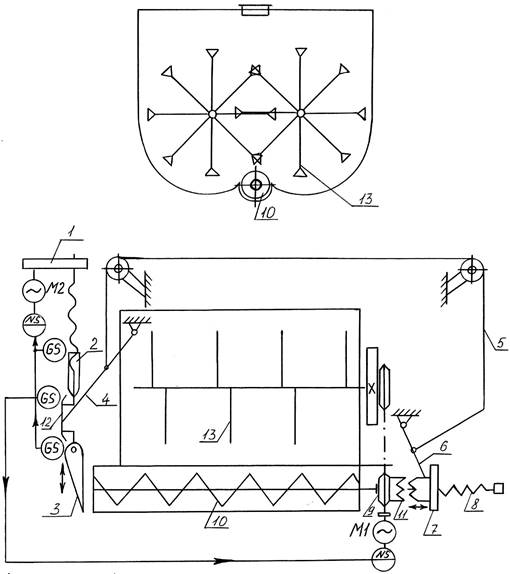
1 – исполнительный механизм; 2 – шток; 3 – клиновая задвижка; 4, 6 – рычаги; 5 – трос, 7 – скользящая полумуфта; 8 – пружина; 9 – ведущая звёздочка; 10 – выгрузной шнек; 11 – приводная полумуфта;
12 – копир; 13 – лопастные мешалки
Рисунок 33.4 – Функциональная схема автоматизации смесителя кормов С-12
УРОК №34. ТЕХНОЛОГИЧЕСКИЕ ОСНОВЫ АВТОМАТИЗАЦИИ КОРМОПРИГОТОВЛЕНИЯ.
Одним из путей увеличения производства продукции животноводства с одновременным снижением себестоимости производства продукции является более рациональное использование в рационах животных корнеплодов, обладающих высокой кормовой ценностью и большой урожайностью. Наибольшую отдачу от этих кормов можно получить, только применяя их в измельчённом или запаренном виде. Корнеклубнеплоды обычно загрязнены землёй, песком и могут содержать посторонние примеси (камни, куски дерева, металла и др.), поэтому перед скармливанием животным их необходимо обязательно очищать, мыть и измельчать. Фактическая загрязнённость корнеклубнеплодов после уборки может достигать значений от 12 до 20 % по массе и более. Допускаемая же загрязнённость после мойки должна быть не более значений от 2 до 3 %. Продукт в воде следует держать недолго, иначе вымываются ценные питательные вещества (крахмал, сахар). Производительность и качество приготовление кормов из корнеклубнеплодов зависит от надёжности работы автоматической системы, своевременности и точности выполнения технологических операций.
Агрегат для приготовления корнеклубнеплодов (рисунок 34.1) предназначен для мойки, измельчения и запаривания картофеля, моркови, кормовой свеклы и других корнеклубнеплодов перед последующим скармливанием их животным и птице. Агрегат для приготовления корнеклубнеплодов представляет собой поточную линию, состоящую из загрузочного и измельчающего транспортёров, моющей измельчающей машины, запарного чана и транспортного устройства.
При работе поточной линии (рисунок 34.1) корнеклубнеплоды загрузочным транспортером 1 подаются в подающий транспортер 2, из которого они поступают в камнеотделительное устройство и в моющую и измельчающую машину 3. В зависимости от принятой технологии корнеклубнеплоды могут поступать в запарный чан 4 или в транспортное устройство в неизмельчённом или измельчённом виде.
Система автоматизации обеспечивает управление поточно-транспортной линией измельчения и запаривания корнеклубнеплодов в функциях времени, уровня и массы.
В начальный момент времени оператор запускает поточно-транспортную линию. Сначала срабатывает программное реле (позиция 3), которое непосредственно запускает всю линию. Корнеклубнеплоды засыпаются в загрузочный транспортер оттуда они следуют по подающему транспортеру в моющую измельчающую машину после мойки и измельчения поступает в запарный чан. После заполнения запарного чана или транспортного устройства срабатывает мембрана датчика заполнения (позиция 1) или датчик весов (позиция 2), отключается магнитный пускатель электродвигателя М1 загрузочного транспортера (позиция 7) и электродвигатель М2 подающего транспортера (позиция 6). Затем отключается моющая измельчающая машина с задержкой времени через реле времени (позиция 8) нужного для удаления остатков корнеклубнеплодов и срабатывает магнитный пускатель (позиция 5).
Следом за ним включается реле времени (позиция 9), которое включает электромагнит подачи пара и отключает подачу пара после истечения времени нужного для запаривания корнеклубнеплодов. Вся система отключается и ждет команды для очередного запуска всей системы автоматизации поточно-технологической линии приготовления корнеклубнеплодов.
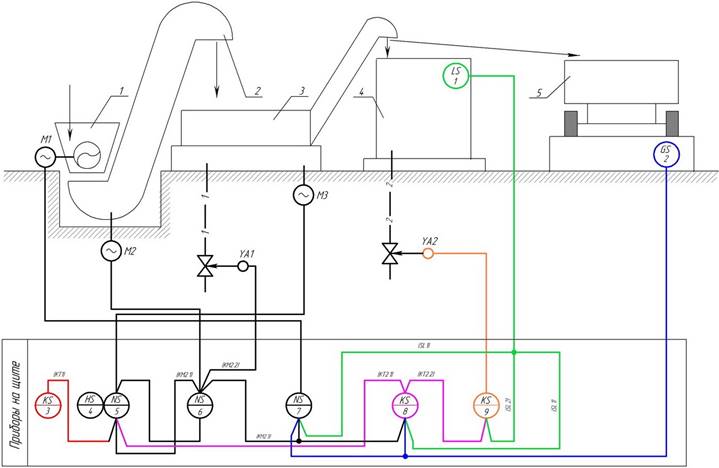
1 – загрузочный транспортер; 2 – подающий транспортер; 3 – моющая измельчающая машина;
4 – запарный чан; 5 – транспортное устройство
Рисунок 34.1 – Функциональная схема автоматизации ПТЛ приготовления корнеклубнеплодов
Принципиальная электрическая схема управления агрегатом приведена на рисунке 35.2.
Поточная линия может быть включена от специального программного устройства KТ1 в соответствии с заданной программой или вручную при помощи кнопки SB.2. Схема автоматизации приготовления корнеклубнеплодов работает следующим образом. При нажатии кнопки SB.2 получает питание пускатель KМ3, который включает электродвигатель моющей и измельчающей машины 3. Контактами KМЗ включается пускатель KМ2, подающий напряжение на электродвигатель транспортера 2. Контакты KМ2.2 замыкают цепь электромагнита УА1, подающего воду в мойку, а KМ2.3 – цепь пускателя KМ1, включающего загрузочный транспортер 1. Реле времени KТ2 замыкает контакты KТ2.1, размыкает KТ2.2. Таким образом, все машины поточной линии включались последовательно против потока, что исключает возможность завала машины и подающего транспортера продуктом. В запарном чане 4 в верхней части установлено реле уровня SL. При наполнении чана продуктом до установленного уровня реле срабатывает, отключая загрузочный транспортёр 1, но в верхней части чана еще остается часть свободной емкости, достаточной для размещения оставшегося в поточной линии продукта. В этом случае в электрической схеме происходят следующие переключения.
При наполнении запарного чана до установленного уровня срабатывает реле уровня SL, разрывая своими контактами SL.1 цепи питания катушек магнитного пускателя KM1 и реле времени KT2, а контактом SL.2 включает реле времени KТ3. Реле времени KT2 отключит электродвигатель M3 моющей измельчающей машины через выдержку времени, достаточную для освобождения её от продукта.
Одновременно это же реле замыкает цепь питания электромагнита подачи пара YA2, проходящую через контакт реле времени KT3, который разомкнётся через выдержку времени, необходимую для запаривания.
При поступлении продукта в транспортное устройство после его наполнения до заданной массы срабатывает конечный выключатель SQ, который отключит электродвигатель M1, а через выдержку времени, необходимую для освобождения линии от продукта, отключится вся поточная линия.
Переключатель SA служит для переключения режимов поступления корнеклубнеплодов в запарный чан или в транспортное устройство.
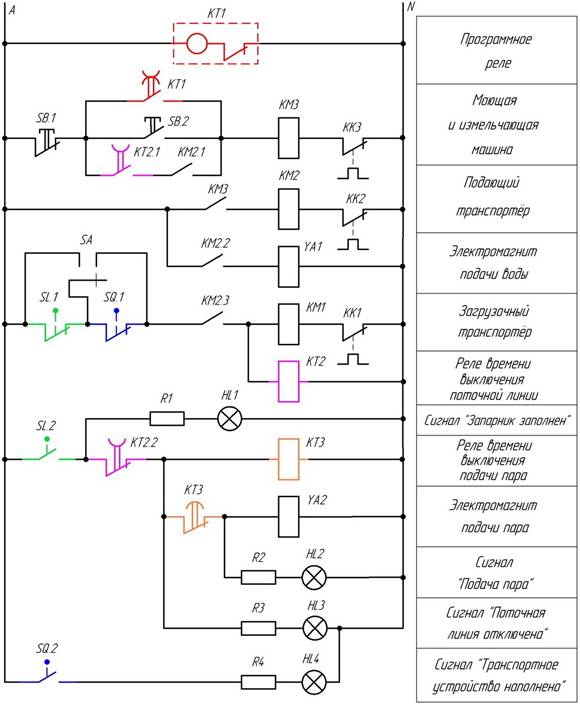
Рисунок 34.2 – Принципиальная электрическая схема управления агрегатом для приготовления корнеклубнеплодов
На животноводческих фермах и комплексах скот кормят кормовыми смесями, приготовленными из разных кормов местного производства (сено, сенаж, силос, корнеплоды и т. п.) с добавкой специальных компонентов промышленного приготовления (концентраты, белковые, витаминные и минеральные добавки). Конкретная технология приготовления кормовой смеси учитывает кормовую базу, вид поголовья и технологию его содержания. Основная составляющая часть кормоцеха − поточная технологическая линия (ПТЛ). Технология приготовления грубых кормов заключается в их измельчении и смешивании с другими компонентами, технология приготовления кормов из корнеплодов − в мойке, измельчении и смешивании. Набор ПТЛ для данного поголовья и зоны определяет технологическую схему кормоцеха, при этом линии комплектуют как серийными машинами, так и машинами специальной разработки.
Оборудование комбикормовых цехов (ОКЦ) предназначено для производства полнорационных рассыпных комбикормов на межхозяйственных комбикормовых заводах производительностью 15, 30 и 50 т за смену. Оборудование скомпоновано в одном или двух блоках: зерновом и мучном. Задача комбикормовых цехов − максимально использовать местное сырье (фуражное зерно, травяную муку, пищевые отходы и т. п.) и белково-витаминные добавки промышленного производства.
Устройство и технология приготовления комбикормов всех цехов ОКЦ аналогичны (рисунок 35.1). Фуражное зерно из транспортных средств или транспортером из зерносклада подается на решётный стан 1, где оно очищается от крупных примесей, а затем, пройдя смеситель 3, норией 4 подается на магнитную заслонку 5, в которой оно очищается от металлических примесей. Далее зернофураж распределяется шнеком 6 по двум секциям зернового бункера 75, а затем дозирующим шнеком 16 направляется на измельчение в дробилку 17.
Зерновая дерть воздушным потоком дробилки 17 направляется по трубопроводу через циклон 7и шнек 8. Шнек имеет просеивающее устройство. На валу шнека закреплен щеточный барабан 9, а на нижней части кожуха шнека − решето.
Просеивающее устройство разделяет дерть на две мучные фракции: мелкую, проходящую через решето в правую секцию бункера 11, и крупную, направляющуюся сходом с решета в левую секцию бункера 11.
Белково-витаминные добавки загружают в смеситель 3 через загрузочную горловину 2 и тем же путем подают в бункер 11 или 14.
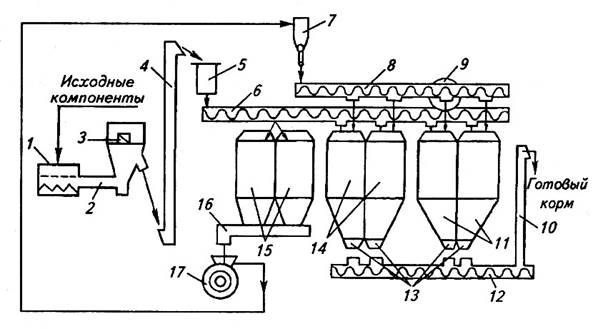
1 – решетный стан; 2 – загрузочная горловина; 3 – смеситель; 4 – нория; 5 – магнитная заслонка; 6, 8, 10, 12, 16 – шнеки; 7 – циклон; 9 – щёточный барабан; 11, 14, 15 – бункера; 13 – дозаторы
Рисунок 35.1 – Технологическая схема комбикормового агрегата ОКЦ-15
Зерновые компоненты и БВД из бункеров 11 и 14 выгружают дозаторами 13, которые установлены в нижней части каждой секции бункера. Дозаторы 13 выдают компоненты в шнек 12 в заданной рецептурной пропорции. Шнек 12 и разгрузочный шнек 10 непрерывно смешивают компоненты и передают готовый комбикорм на склад или в транспортные средства. Оператор в соответствии с заданной рецептурой комбикорма настраивает дозаторы 13 на необходимую выдачу компонента при помощи поворота специального лимба храпового механизма привода, изменяющего частоту вращения дозатора от 0,24 до 17,7 мин-1.
Принципиальная электрическая схема управления кормоцехом приведена на рисунке 35.2.
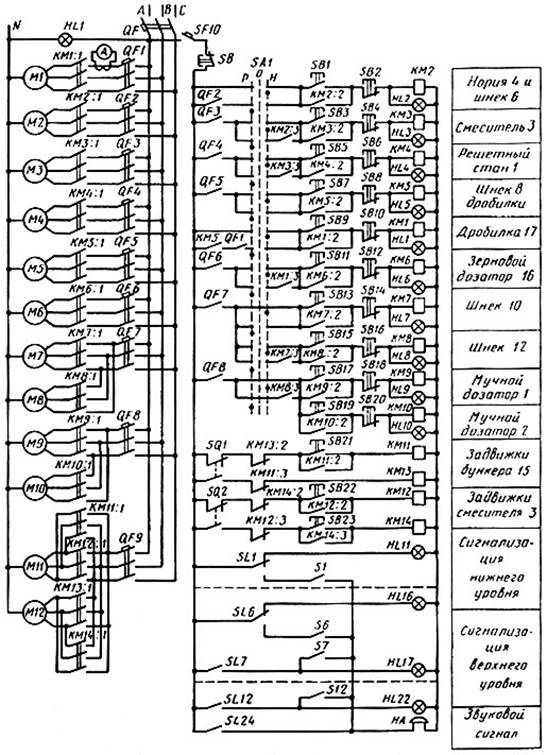
Рисунок 35.2 – Принципиальная электрическая схема управления электрооборудованием комбикормового цеха ОКЦ-15
Работой оборудования цеха управляют дистанционно при помощи электрической схемы, показанной на рисунке 3. Автоматическими выключателями QF5...QF9 и SF10 подают напряжение в схему. Переключатель SA1 имеет три положения: Р − «Работа»; О − «Отключено»; Н − «Режим наладки». Оборудование пускают в работу в следующем порядке (переключатель SA1 в положение Р). Кнопкой SL24 подают предупредительный сигнал НА о начале пуска машин. Кнопками SB1, SB3, SB5 последовательно включают: магнитный пускатель KМ2 электропривода М2 (2,2 кВт) нории 4 и шнека 6, пускатель KМЗ электропривода МЗ (3 кВт) смесителя 3 и пускатель KМ4 электропривода М4 (1,1 кВт) решетного стана
При работе включенных машин зерновой фураж загружается в бункер 15, а в случае необходимости в бункера 11 и 14.
Перед пуском дробилки кнопкой SB 7 включают электропривод М5 (2,2 кВт) шнека 8, а затем кнопками SB9 и SB11 включают электропривод Ml (30 кВт) дробилки 17 и электропривод Мб (0,8 кВт) дозатора 16. Загрузку дробилки контролируют по показателям амперметра А.
Смешивание исходных компонентов и выгрузка готового комбикорма происходят при включении кнопками SB 13 и SB 15 электропривода М7 (3 кВт) вертикального шнека 10 и электропривода М8 (2,2 кВт) мучного шнека 12. Электроприводами М9 и М10 (по 2,2 кВт) дозаторов 13 выгрузки компонентов в шнек 12 управляют кнопками SB21...SB20. Электроприводами М11 и М12 (по 0,27 кВт) задвижек бункера и смесителя 3 управляют кнопками SB21...SB23. В крайних конечных положениях задвижек магнитные пускатели KМ11... KМ14 отключаются конечными выключателями SQ1..SQ2. В схеме предусмотрены блокировки, исключающие возможность завалов материалом при пуске и остановке машин. Все секции бункеров оборудованы датчиками нижнего SL1...SL6 и верхнего SL7...SL12 уровней. Сигнальные лампы HL1...HL6 горят при наличии материалов в бункерах. При снижении его уровня в бункере до предельного значения переключается один из датчиков SL1...SL6 на звуковой сигнал НА и загорается соответствующая сигнальная лампа НL11...НL16. При достижении в бункере уровня предельного верхнего значения срабатывает один из датчиков SL7...SL12, который включает звуковой сигнал НА и соответствующую сигнальную лампу HL17...HL22. Звуковой сигнал отключают с помощью тумблеров S1...S12. В экстренных случаях все машины останавливают кнопкой SB.
ТЕМА 2.5 АВТОМАТИЗАЦИЯ
Под гидромелиоративной системой понимают совокупность оросительных, осушительных и обводнительных систем, создающих благоприятный водный режим для развития растений.
Оросительная система предназначена для пополнения запасов воды в недостаточно увлажненной почве и применяется в тех зонах, где растения систематически испытывают недостаток в воде. Система состоит из водозаборных сооружений, магистральных каналов и распределительной сети по участкам орошения.
Осушительная система предназначена для отвода избытка воды и осушения избыточно увлажненных и заболоченных земель. Она состоит из открытых водосточных каналов, закрытых дренажных водотоков и других устройств.
Обводнительная система предназначена для снабжения водой населенных пунктов, сельскохозяйственных животных и птицы в степных и полупустынных районах, не имеющих естественных водоисточников. Система состоит из прудов, небольших каналов и колодцев. Обводнительная система имеет менее разветвленную распределительную сеть, чем оросительная.
Автоматизация гидромелиоративных систем имеет свои особенности, обусловленные следующими специфическими свойствами объектов управления.
Во-первых, объекты управления отличаются большими мощностями установок и значительной рассредоточенностью по площади. Управляемые объекты связаны через водную среду, вследствие этого имеет место взаимное влияние между ними, например, изменение уровня или расхода воды в одном канале вызывает изменение этих же параметров в соседних каналах. Таким образом, процесс автоматического регулирования должен учитывать связь между регулируемыми параметрами на большой территории.
Во-вторых, все оборудование гидротехнических сооружений, начиная от мощных головных водозаборных устройств и кончая выпускными устройствами на поле, должно работать синхронно и согласованно. В водоводах существует естественная прямая гидравлическая связь от вышележащих водозаборных сооружений к нижележащим водовыпускным. Для автоматизации таких систем необходима организация телемеханических каналов связи.
В-третьих, составленные ранее планы водоиспользования требуют постоянной корректировки в зависимости от атмосферных условий, поведения грунтовых вод, состояния источников воды для орошения и других факторов. Поэтому для централизованного управления такими рассредоточенными системами и своевременной корректировки режимов их работы требуется автоматизация процессов сбора и передачи на диспетчерские пункты управления большого количества информации о состоянии отдельных звеньев и параметров многочисленных объектов, исчисляемых сотнями. Число измерительных и исполнительных органов должно быть таким, чтобы обеспечивалось надежное управление и контроль за параметрами во всех зонах оросительной сети.
В-четвертых, процесс распределения воды характеризуется большим запаздыванием и малыми скоростями увеличения и уменьшения расходов, особенно в открытых каналах. Поэтому для обеспечения непрерывного управления и потребления воды следует иметь резервные объёмы и ёмкости и знать характеристики системы как в установившихся, так и в переходных режимах.
В-пятых, большинство водохозяйственных установок работает на открытом воздухе, в основном в вегетативный период, а в зимний период они находятся в нерабочем состоянии и при несоблюдении условий хранения разрушаются.
При всем многообразии объекты гидромелиоративных систем можно разделить на такие основные группы:
– головные водозаборные и магистральные сооружения;
– регулируемые гидротехнические сооружения линейного вододеления с электрическими или гидравлическими ИМ;
– насосные станции машинного водоподъема для питания дождевальных машин, осушительных систем и т. д.;
– насосные установки артезианских скважин вертикального дренажа, орошения и водоснабжения; – мелиорированные поля при различных способах управления влажностью почвы.
Существуют открытые (каналы) и закрытые (трубопроводы) системы водораспределения. Автоматизация открытой системы водораспределения и регулирования уровня воды основывается на стабилизации уровня в верхнем или нижнем бьефах гидротехнических сооружений. Существует несколько способов регулирования, каждый из которых имеет свои преимущества и недостатки и должен быть соотнесен с местными условиями.
При регулировании по верхнему бьефу головное сооружение магистрального канала оборудуют средствами автоматизации, обеспечивающими поступление в оросительную систему заданного количества воды независимо от колебаний уровня воды в нижнем бьефе.
Распределение поступающей в систему воды обеспечивается за счёт установки в магистральном канале перегораживающих сооружений (рисунок 1), автоматически поддерживающих уровень в верхнем бьефе. Регулятор уровня действует по многопозиционному принципу, позволяя регулировать степень подъема заграждения 1. Специальное реле времени предупреждает срабатывание регулятора при случайных колебаниях уровня воды верхнего бьефа.
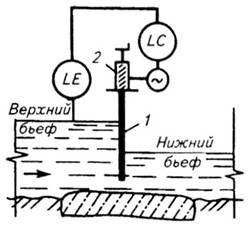
1 – заграждение; 2 – привод заграждения
Рисунок 1 – Схема стабилизации верхнего бьефа
Особенность схемы регулирования по верхнему бьефу заключается в том, что между бьефами магистрального канала, образовавшимися в результате установки автоматических регуляторов уровня, существует только прямая гидравлическая связь. В результате при прекращении полива какого-то участка и закрытии соответствующего водовыпуска излишний расход воды поступает в нижерасположенный бьеф, из него в следующий и т. д. При этом все нижерасположенные перегораживающие сооружения сохраняют постоянный уровень в своих бьефах, но вся избыточная вода уходит на сброс.
В случае незапланированного увеличения потребления воды одним из потребителей все нижерасположенные перегораживающие сооружения автоматически перекрываются, транзитные расходы уменьшаются и наиболее удалённые потребители не получают достаточного количества воды.
Регулирование по верхнему бьефу дает наибольший эффект при оснащении системы средствами автоматики и телемеханики, обеспечивающими управление и оперативный контроль за состоянием всех сооружений системы и позволяющими оперативно устранять отклонения от заданного режима работы, обеспечивая баланс между водозабором и водопотреблением.
При регулировании по нижнему бьефу разбор воды потребителями не ограничивается. Информация о разборе воды передается на головное сооружение для автоматического регулирования подачи воды в оросительную систему путем установки по длине магистрального канала заграждений, оборудованных автоматикой поддержания уровня в своих нижних бьефах. При этом способе регулирования между бьефами магистрального канала существует не только прямая, но и обратная гидравлическая связь. В результате каждое изменение режима работы нижерасположенного бьефа вызывает перестройку работы всех вышерасположенных сооружений, включая и головное, которое, кстати, также оборудуют автоматическим регулятором, стабилизирующим уровень в начале магистрального канала.
Например, при увеличении потребления воды на каком-то участке оросительной системы автоматически открывается вышерасположенное заграждение, поддерживая уровень в нижнем бьефе. Понижение уровня в верхнем бьефе отрабатывается следующим заграждением вплоть до головного сооружения, увеличивающего подачу воды в магистральный канал.
Смешанное регулирование – это регулирование по нижнему бьефу, дополненное ограничениями колебаний максимальных и минимальных уровней в верхних бьефах. Этот способ исключает опасность переполнения бьефов и перелива воды через бровку канала в случае аварии на головном сооружении.
Такая система в нормальных условиях осуществляет регулирование по нижнему бьефу, а в случае опасности переполнения или опорожнения магистрального канала переключается на регулирование по верхнему бьефу, поддерживая уровни за счёт увеличения или уменьшения концевого сброса.
Поверхностное орошение – наиболее простой способ, при котором используются закрытые трубопроводы или открытые лотки. Вода распределяется системой распределительных и поливных лотков, оборудованных гидравлическими регуляторами расхода.
Дождевание – распространенный способ машинного орошения, эффективно повышающий влажность и снижающий температуру в приземном слое воздуха. Дождевальные системы хорошо поддаются механизации и автоматизации.
Схема стационарной системы дождевания с программным управлением представлена на рисунке 2. Система состоит из насосной станции 1, магистрального напорного трубопровода 4 и поливных трубопроводов 5 с установленными на них дождевальными аппаратами 6, каждый из которых подключен к трубопроводу через трехпозиционный гидроклапан. При подаче воды в напорный трубопровод открываются гидроклапаны дождевальных аппаратов первого ряда (ближайшие к напорному трубопроводу). Через заданное время программное устройство KS1 формирует кратковременный импульс снижения давления в напорном трубопроводе за счёт закрытия напорного клапана 2 и открытия перепускного клапана 3. Каждый такой импульс приводит к закрытию гидроклапанов действующего ряда дождевальных аппаратов и открытию следующего.
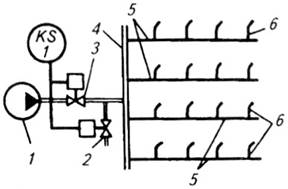
1 – насосная станция; 2 – перепускной клапан; 3 – напорный клапан;
4 – магистральный напорный трубопровод; 5 – поливные трубопроводы; 6 – дождевальные аппараты Рисунок 2 – Функциональная схема автоматизации стационарной системы дождевания
Капельное орошение – самый экономичный способ увлажнения, при котором вода подаётся прямо в корнеобитаемый слой небольшими дозами через специальные водовыпускные отверстия (капельницы), устанавливаемые через каждые 50...100 см на увлажняющих трубопроводах. Управление системой капельного орошения должно обеспечивать нужную очередность увлажнения отдельных участков и корректировать норму полива каждого из них. Первая задача решается с помощью клапанов с электромагнитным приводом, управляемых программным устройством, вторая – изменением напора в распределительных трубопроводах, а также дозированием времени работы отдельных секций поливаемого участка.
Осушение земель производится в зонах избыточного увлажнения, а также в районах орошения изза заболачивания орошаемых участков. Различают неуправляемый и управляемый режимы осушения. При неуправляемом режиме с осушаемой площади отводится максимально возможное количество воды, определяемое параметрами осушительной сети или мощностью осушительных насосных станций. Управляемый режим применяют для регулирования уровня грунтовых вод, обеспечивающего наиболее благоприятный водно-воздушный режим почвы.
В мелиоративном хозяйстве насосные станции при орошении служат для заполнения водохранилищ, подъема воды на командные отметки орошаемых полей, отвода сбросных оросительных и перекачки грунтовых вод, а при осушении – для перекачки сточных вод из каналов и коллекторов, а также для понижения уровня грунтовых вод.
Рассмотрим автоматизацию оросительной насосной станции с предварительной заливкой насоса водой и с управлением по уровню воды в водоприемном сооружении (рисунок 3, а, б). В режиме ручного управления переключатель SA ставят в положение Р и управляют работой оборудования при помощи кнопок SB1...SB6.
В автоматическом режиме переключатель SA ставят в положение А. При понижении уровня в водоприёмном сооружении до минимально допустимого значения замыкаются контакты SL2 датчика уровня и срабатывает реле KV1, которое включает электромагнитный клапан УА, установленный на заливной линии насоса. Насос через этот клапан заливается водой, а воздух в насосе выходит через реле залива KЗ. В конце заполнения насоса водой срабатывает реле залива KЗ и включает реле KV, которое, в свою очередь, вызывает включение магнитного пускателя KМ1 и реле времени KТ. Магнитный пускатель запускает электродвигатель M1 привода насоса. При разгоне двигателя в напорном патрубке создается давление, от которого срабатывает реле давления KSP, включающее магнитный пускатель KМ2 и двигатель М2 на открытие задвижки на напорном трубопроводе. При полном открытии задвижки двигатель М2 выключается конечным выключателем SQ1 и загорается сигнальная лампа HL1. Одновременно переключаются контакты конечного выключателя SQ2 и гаснет лампа HL2. Струйное реле KSH, реагируя на движение воды в трубопроводе, размыкает свои контакты в цепи реле времени KT и отключает его.
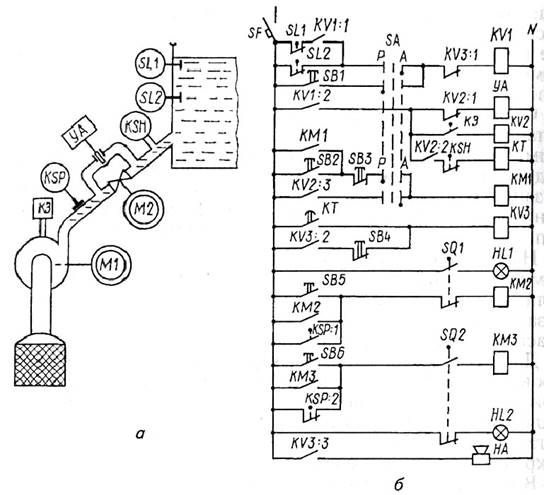
Рисунок 3 – Технологическая (а) и принципиальная электрическая (б) схемы управления оросительной насосной станцией
Отключение насоса происходит от датчика SL1 верхнего уровня воды в водонапорном сооружении. Его контакты размыкают цепи тока реле KV1, которое отключает электромагнит УА, реле KV2, а затем магнитный пускатель KМ1 и двигатель M1 насоса. Давление воды в напорном трубопроводе снижается до статического давления столба воды со стороны водохранилища. При этом давлении контакты реле давления KSP возвращаются в исходное положение и магнитный пускатель KМ3 включает двигатель М2, закрывающий задвижку. При полном закрытии задвижки контакты конечных выключателей SQ1 и SQ2 занимают исходное положение, контакты SQ2 отключают двигатель М2. Повторный автоматический пуск произойдет при снижении уровня воды до замыкания контактов SL2.
Реле времени KТ предназначено для аварийного отключения насоса. Если, например при пуске, вода не поступает в водоприёмное сооружение, то контакты струйного реле KSH остаются замкнутыми, реле времени включает аварийную сигнализацию НА. От реле KV1 отключаются реле КV2 и магнитный пускатель KМ1, в результате останавливается электронасос M1.
Аварийное реле включено до тех пор, пока обслуживающий персонал не нажмет кнопку деблокировки SB4. Одновременно отключится электромагнитный клапан УА. Такая же последовательность работы схемы на отключение насоса будет и при случайном перерыве подачи воды.
Для откачки сточных, дренажных и хозяйственно-фекальных вод используют низконапорные (8...95 м) высокопроизводительные (16...9000 м3) канализационные электронасосы. Обычно эти насосы имеют простую конструкцию. Они оборудованы кнопочной станцией дистанционного управления электронасосным агрегатом при помощи магнитных пускателей.
В качестве примера рассмотрим систему автоматического управления двухагрегатной водоотливной насосной станцией (рисунок 4). Вручную агрегаты включают и отключают с помощью кнопок SB1...SB4, в автоматическом режиме – с помощью электродных датчиков уровня SL1...SL4.
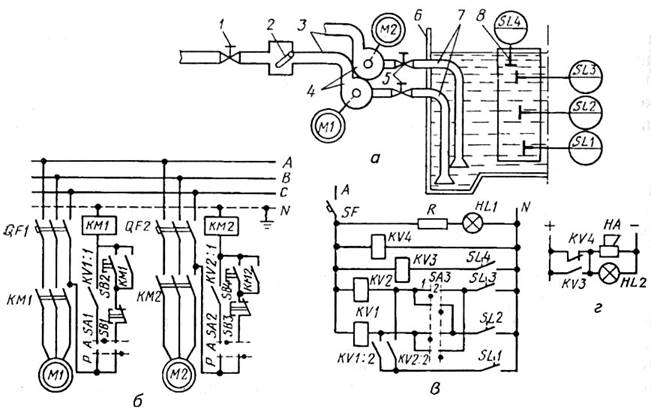
1, 5 – задвижки; 2 – клапан; 3 – нагнетающие трубопроводы; 4 – насосы; 6 – резервуар;
7 – всасывающие трубопроводы; 8 – электрод
Рисунок 4 – Технологическая (а) и принципиальные электрические (б, в, г) схемы управления двухагрегатной откачивающей насосной станцией
Задвижки 7 и 5 с ручным приводом закрывают при ремонте насосов. При работе насосов они открыты. Обратный поток жидкости через неработающий насос 4, нагнетающий 3 и всасывающий 7 трубопроводы предотвращает клапан 2. Сточные воды и навозная жижа собираются в резервуар 6. По мере повышения их уровня замыкаются контакты датчиков SL1, SL2 и общий электрод 8 (заземлённая труба). Вначале отдатчика SL2 включается один насос. Если приток сточных вод больше, чем производительность насоса, то уровень стоков повышается и датчиком SL3 включается второй электронасос.
Очерёдность включения агрегатов определяется переключателем SA3. Например, в положении 1 переключателя SA3 вначале от датчика SL2 срабатывает реле KV1, которое включает электродвигатель M1 первого насоса, а затем от датчика SL3 – реле KV2 и второй электронасос М2. В положении 2 переключателя очерёдность включения насосов будет обратной. Вторыми парами контактов реле KL1 и KL2 шунтируют через датчик SL1 цепи датчиков SL2 и SL3. Благодаря этому шунтированию отключение реле KV1 и KV2, а затем и насосов при снижении уровня сточной воды произойдёт только тогда, когда разомкнётся цепь датчика SL1 нижнего уровня.
Если производительность и двух агрегатов меньше притока сточных вод, то от повышения уровня замыкается цепь датчика SL4 и срабатывает реле KV3, которое включает аварийно-предупредительную звуковую НА и световую HL2 сигнализации. Эти же сигнализации срабатывают от реле KV4 при исчезновении напряжения питания. Цепи аварийной сигнализации получают питание от независимого источника.
УРОК №37. ОБЪЁМ АВТОМАТИЗАЦИИ МОБИЛЬНЫХ МАШИН В ПОЛЕВОДСТВЕ.
Основную долю ТП в полеводстве (предпосевная подготовка семян, клубней, обработка почвы, посев, уход за растениями, уборка урожая) выполняют мобильные сельскохозяйственные агрегаты (МСА). К ним относятся самоходные комбайны и совмещенные с трактором различные прицепные машины (орудия): почвообрабатывающие, посевные, для внесения удобрений, прореживания всходов сельскохозяйственных культур, дождевальные, уборочные и др.
Повышенные требования, предъявляемые к качеству и эффективности ТП в полеводстве, а также высокая конкурентоспособность МСА диктуют необходимость решения проблемы повышения их технико-экономического и экологического уровней.
МСА работают в сложных и различных почвенно-климатических условиях при многообразии случайных возмущений, различных неопределенностей, которые приводят к нарушениям энергетического и технологического режимов работы машин. Так, перегрузки и недогрузки в работе дизельного двигателя МСА приводят к перерасходу топлива, снижениям ресурса двигателя, производительности и качества работы, а также к резкому увеличению отрицательного воздействия мобильных агрегатов на оператора (водителя), почву и растения, атмосферу. Колебания скорости движения МСА снижают качество выполнения ТП, увеличивают потери технологического продукта, а буксование колес отрицательно воздействует на структуру верхнего слоя почвы, снижает расход топлива и общий тяговый КПД мобильного агрегата. Оператор одновременно с управлением МСА непрерывно контролирует ход ТП, техническое состояние агрегата, а также обеспечивает безопасность его движения. В реальных условиях работы водитель практически не в состоянии своевременно принять правильное решение (создать управляющие воздействия) при восприятии и обработке огромного потока взаимозависимой информации, превышающей его физиологические возможности. Особенно это сказывается при работе современных МСА на повышенных скоростях. Ручное управление такими агрегатами недостаточно эффективно, а потенциальные возможности их не используются в полном объеме в связи с ограничениями, вносимыми «человеческим фактором».
Неизбежным и кардинальным направлением повышения технико-экономического и экологического уровней мобильных агрегатов является автоматизация контроля и управления технологическими, энергетическими и эксплуатационными режимами их работы МСА при минимальном участии человека.
В то же время создание эффективных средств автоматизации, большого разнообразия мобильных агрегатов представляет собой непростую задачу, связанную и со специфическими особенностями функционирования МСА. Это работа их на открытом пространстве в условиях изменяющихся в широких пределах температуры и влажности, запыленности и загазованности, наличия значительных вибраций, шумов, а также отсутствие на МСА стабильного источника электрической энергии, низкая квалификация обслуживающего персонала. Перечисленные факторы предъявляют повышенные требования к надежности средств автоматизации мобильной техники, простоте их эксплуатации и обслуживания.
Они обеспечивают контроль частоты высева семян и количества технологического материала (семян, удобрений) в бункерах машин.
Структурная схема таких систем (рисунок 37.1) включает набор датчиков Д1...Дп, установленных на посевном агрегате (объекте автоматического контроля), блок усиления и преобразования сигналов (БУП) датчиков, монитор для оператора (установленный в кабине трактора или самоходного комбайна).
Датчики основных контролируемых параметров (уровней семян, удобрений в бункерах сеялки и частоты высева семян) имеют фотоэлектрический принцип действия и состоят из оптически связанных между собой фотоприемника (например, фоторезистора, фотодиода) и светового излучателя (например, светодиода или лампы накаливания). Системы автоматического контроля (САК) имеют режим «Проверка», при котором генерируется импульсная последовательность, имитирующая сигналы датчиков при нормальном протекании технологического процесса высева семян.
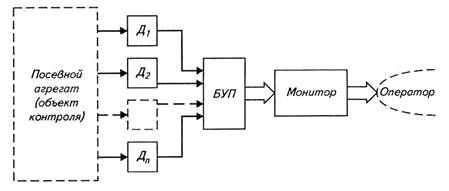
Д1…Дn – датчики контролируемых параметров; БУП – блок усиления и преобразования сигналов датчиков Рисунок 37.1 – Общая структурная схема системы автоматического управления посевным агрегатом
Электрическая схема устройства САК зерновой сеялки показана на рисунке 37.2. Устройство имеет 12 идентичных каналов обработки сигналов датчиков частоты высева семян. Каждый из каналов преобразования сигналов датчиков (световых излучателей 1 и фотодиодов 2) содержит усилитель 3, ёмкость 4 с электронным ключом 5, световой индикатор (светодиод) 7.
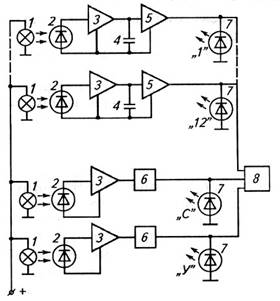
1– световой излучатель; 2 – фотодиод; 3 – усилитель; 4 – ёмкость; 5 – электронный ключ;
6 – электронное реле; 7 – световые индикаторы; 8 – блок звуковой сигнализации
Рисунок 37.2 – Электрическая схема устройства контроля работы зерновой сеялки
При работе зерновой сеялки семена (поступившие из ее высевающих дисков) периодически прерывают световой поток между световым излучателем 1 и фотодиодом 2, на выходе которого вырабатываются электрические импульсы, поступающие на вход усилителя 3 соответствующего канала контроля (семяпровода) и далее на электронный ключ 5 с ёмкостью 4. Если период следования импульсов меньше времени заряда емкости (конденсатора), то электронный ключ э соответствующего канала закрыт и его световой индикатор 7 не будет светиться. Если же произойдет сбой или нарушение (технологии высева семян) работы высевающего аппарата, то подача импульсов с фотодиодов 2 прекращается или их частота резко снижается. При этом ёмкость 4 заряжается до необходимого уровня напряжения, электронный ключ 5 срабатывает и включает соответствующий конкретному семяпроводу световой индикатор 7. Оператору с блока звуковой сигнализации 8 подаётся при этом прерывистый сигнал.
Датчики уровня технологического материала в бункере сеялки устанавливают в его нижней части. Если, например, уровень заполнения бункера семенами (удобрением) превышает место (высоту) установки датчика, то световой поток его излучателя не попадает на соответствующий фотодиод 2 и выходной ток последнего будет минимален. Если же этот уровень ниже места установки датчика, то на фотодиод попадает световой поток, что вызывает существенное возрастание силы тока (в цепи фотодиода) и его увеличение усилителем 3 до порога включения электронного реле 6 и светового указателя 7 минимального уровня семян «С» (удобрений «У»).
Устройство (рисунок 37.2) в виде электронного блока выполнено в герметичном корпусе, закрепленном на сеялке и имеющем электрические разъемы для подключения датчиков и источника электрической энергии (аккумулятора МСА).
Таким образом, оператор, находясь в кабине трактора (комбайна), получает достоверную информацию о наличии семян или удобрений в бункерах, а также о нарушениях работы конкретных семяпроводов высевающих аппаратов. Описанные системы автоматического контроля существенно сокращают сроки сева и повышают его качество.
Системы автоматического контроля положения рабочих органов кукурузоуборочных агрегатов предназначены для обеспечения контроля положения русел (относительно рядков стеблей кукурузы) прицепных кукурузоуборочных комбайнов как в светлое, так и в тёмное время суток.
Функционально-технологическая схема системы контроля приведена на рисунке 37.3, а, б. При движении кукурузоуборочного агрегата по рядкам кукурузы рамка копира 8 датчика, установленного на делителе среднего мыса жатки, находится в междурядье. Если приемные русла жатки комбайна отклоняются от рядков стеблей или же сами рядки имеют искривления, то копир датчика, касаясь стеблей кукурузы, отклоняется, что вызывает поворот связанного с ним посредством тросика и шкива якоря индуктивного преобразователя (выполненного по схеме дифференциального трансформатора). Якорь поворачивается на угол, пропорциональный отклонению копира. Возникающий при этом электрический сигнал поступает на усилительно-преобразующий блок (УПБ) через последовательно соединённые чувствительный элемент (ЧЭ), измерительные преобразователи (ИП) и далее на устройство отображения информации (УОИ), на лицевой панели которого расположены световые индикаторы. Число их включения пропорционально значению отклонения копира, а направление световой полосы (зелёного цвета) относительно постоянно светящейся полосы (красного цвета) соответствует значению и направлению отклонения русел комбайна от требуемой траектории движения, определяемой расположением рядков кукурузы.
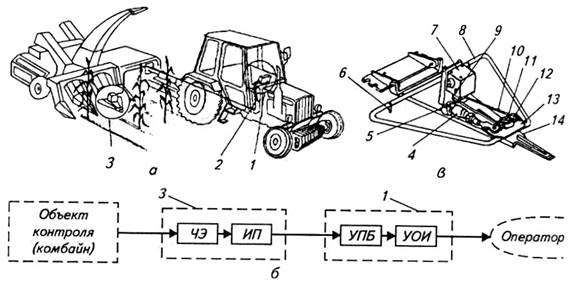
1 – устройство отображения информации; 2 – усилительно-преобразующий блок; 3 – копир;
4 – демпфирующее устройство; 5 – шкив; 6 – ограничитель поворота; 7 – передающий преобразователь; 8 – рамка копира; 9 – контрольная метка; 10 – тросовый привод 11 – ось поворота; 12 – натяжной винт; 13 – пластина; 14 – основание
Рисунок 37.3 – Функционально-технологическая схема системы автоматического контроля положения русел зерноуборочного комбайна
Используя такую информацию, оператор может оперативно устранять возникающие отклонения, воздействуя на рулевой механизм трактора и изменяя положение комбайна относительно рядков растений. Чувствительный элемент датчика положения русел комбайна относительно рядков растений представляет собой рамку копира (рисунок 37.3, в), которая может под воздействием растений кукурузы поворачиваться относительно основания 14. Рамка с ограничителем поворота 6 связана тросовым приводом 10 со шкивом 5 передающего преобразователя 7 датчика и посредством пластины 13 соединена с демпфирующим устройством 4. Ось поворота 11 рамки копира является базой ориентации машины. Изменение ее положения относительно центра междурядья приводит к повороту рамки.
Исходное (нейтральное) положение поворотной рамки копира и связанного с ней шкива передающего преобразователя устанавливается натяжными винтами 12 крепления тросика на пластине 13 рамки копира. Это положение определяется по совпадению контрольной метки 9 на корпусе с указателем, расположенным на его валу.
При уборке зерна, корнеплодов и клубнеплодов применяют следующие виды автоматизации:
– автоматическое управление положением остова зерноуборочного комбайна;
– автоматическое управление загрузкой рабочих органов уборочных комбайнов;
– автоматическое управление загрузкой и чистотой зерновой массы;
– автоматическое управление направлением движения уборочных комбайнов.
Для автоматизации зерноуборочных и кукурузоуборочных самоходных машин может использоваться микропроцессорная система автоматического контроля и автоматического регулирования (САКАР).
|
|
Видеоматериалы к занятию |
УРОК №38. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (САУ) ПОЛОЖЕНИЕМ
РАБОЧИХ ОРГАНОВ МОБИЛЬНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРЕГАТОВ (МСА).
Они позволяют повысить качество и эффективность выполнения ТП, а также улучшить условия работы оператора. В частности:
1.1 Автоматическое управление глубиной вспашки предназначено для стабилизации глубины вспашки (хода плугов, лемехов и других рабочих органов). Практическое применение нашли силовой, высотный и комбинированный способы стабилизации глубины вспашки.
С и л о в о й с п о с о б основан на том, что тяговое сопротивление плуга зависит от глубины вспашки. При увеличении (уменьшении) тягового сопротивления специальная пружина, установленная между трактором и плугом, сжимается (разжимается) и перемешает шток и поршень управляющего гидрозолотника. При этом последний перераспределяет (под давлением от насоса) поток масла (гидравлической жидкости) в соответствующие полости силового гидроцилиндра, который осуществляет выглубление (заглубление) лемехов плуга до заданного тягового усилия. Такой способ позволяет также стабилизировать нагрузку трактора и обеспечивать экономичную работу его двигателя. Силовой способ эффективен в работе преимущественно на однородных по составу почвах при постоянной скорости движения трактора, т. е. когда тяговое усилие трактора пропорционально глубине хода лемехов плуга.
В ы с о т н ы й с п о с о б применяют для неоднородных почв (рисунок 38.1). В устройстве перед плугом 1 устанавливают опорное колесо (датчик глубины) 2, механически соединенное со штоком гидрозолотника 4. При изменении глубины вспашки шток перемещается и окна а и б гидрозолотника открываются. Через них масло под давлением поступает в гидроцилиндр, который регулирует высоту плуга, восстанавливая необходимую глубину его хода.
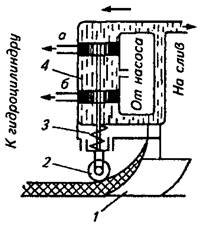
1 – плуг; 2 – опорное колесо; 3 – пружина; 4 – гидрозолотник
Рисунок 38.1 – Схема устройства для управления глубиной вспашки
К о м б и н и р о в а н н ы й с п о с о б объединяет принципы и устройства силового и высотного способов управления глубиной хода рабочих органов MCA.
1.2 Автоматическое управление высотой среза кормовых трав, кукурузы и другой зеленой массы применяют на сенокосилках и силосоуборочных комбайнах. Высоту среза растений устанавливают минимально допустимой, что повышает сбор зеленой массы. Для этого используют полозковый щуп 2, копирующий рельеф поля (рисунок 38.2).
К поверхности поля щуп 2 прижимается пружиной 2. Если высота среза зеленой массы соответствует заданной, то окна а и б гидрозолотника 5 закрыты, а поршень силового гидроцилиндра 6 и режущий аппарат 1, жестко связанный с поршнем, находятся на постоянной высоте от поверхности поля. При изменении рельефа поля полозковый щуп 2 открывает окна а и б гидрозолотника 5 и при помощи силового гидроцилиндра 6 восстанавливается заданная высота режущего аппарата 1, после чего окна гидрозолотника закрываются, поскольку щуп возвращается в исходное положение. Предохранительное устройство 4 предотвращает поломки золотника при наезде полозкового щупа на препятствия.
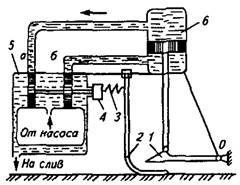
1 – режущий аппарат; 2 – полозковый шуп; 3 – пружина; 4 – предохранительное устройство;
5 – гидрозолотник; 6 – силовой гидроцилиндр
Рисунок 38.2 – Схема устройства для управления высотой среза
1.3 Системы автоматического управления рабочими органами прореживателей сахарной свеклы предназначены для обработки (срезания) пропашных культур свеклоуборочными и другими комбайнами.
Функциональная схема системы управления секцией прореживателя типа ПСА показана на рисунке 38.3. Для обнаружения растений применяют электроконтактные и оптические (цветоконтрастные) датчики. При движении MCA вдоль рядков растений электроконтактный датчик 7, касаясь растения, замыкает через него электрическую цепь «источник питания – почва». Наличие силы тока определенного значения в цепи контактного электрода служит для электронных блоков системы ПСА сигналом обнаружения растения. Расстояние от датчика 7 обнаружения растения до поверхности почвы может варьировать от 20 до 90 мм. Оптический цветоконтрастный датчик формирует электрический сигнал при попадании растений свеклы в зону его обзора. Такой датчик обнаруживает растения свеклы как на фоне земли, так и на фоне распространенных сорняков.
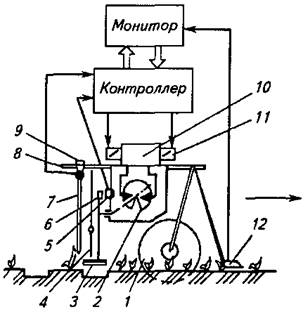
1 – опорное колесо; 2 – поворотный гидродвигатель; 3 – прореживающий нож; 4 –литьеотгибатель;
5 – индукционная катушка; 6 – ферромагнитный шунт; 7– злектроконтактный датчик обнаружения растений; 8 – рама прореживающей секции; 9 – изолятор; 10 – золотниковый гидрораспределитель;
11– электромагнитный привод золотника; 12 – датчик ориентации
Рисунок 38.3 – Функциональная схема системы управления секцией прореживателя
Датчик положения ножа состоит из индукционной катушки, закрепленной на корпусе исполнительного механизма (ножа), и ферромагнитного шунта 6, установленного на держателе ножа 3, который может совершать маятниковые движения. При выходе ножа из одного крайнего положения шунт проскакивает мимо индукционной катушки, в цепи которой формируется импульсный сигнал, свидетельствующий об изменении положения прореживающего ножа. Команды на привод последнего формируются в блоке управления (БУ) на основании совместной обработки сигналов от датчиков обнаружения растений и положения ножа. При поступлении команды из БУ электромагнитный привод золотника перемещает шток золотникового гидрораспределителя 10, вследствие чего поворотный гидродвигатель 2 воздействует на прореживающий нож 3. При этом вырезаются растения в рядке по ширине захвата ножа, который, перемещаясь, пропалывает пространство за обнаруженным растением. При обнаружении следующего растения процесс повторяется. При смешении прореживающих секций от оси рядка датчик 12 ориентации секций формирует сигнал на монитор, при этом загорается соответствующий светодиод. Если оператор своевременно не откорректирует положение MCA относительно рядков, то включается звуковой сигнал.
Схема устройства системы автоматического управления прореживателями сахарной свеклы показана на рисунке 38.4. Электрические цепи датчиков обнаружения растений и положения ножей подключены к блоку входному (БВ) через электрические разъемы X6, и Х7, а электромагниты золотниковых гидрораспределителей (12 шт.) – к блоку управления исполнительными механизмами (БУ ИМ) через разъемы Х4 и Х5. Сигналы электроконтактных датчиков подаются в БВ на входы операционных усилителей, каждый из которых обеспечивает преобразование значения сопротивления электрической цепи «щупземля» соответствующего датчика в напряжение. Оно сравнивается компараторами (элементами сравнения) с эталонными значениями напряжения, соответствующими верхнему и нижнему значениям сопротивления цепи «щуп-земля», при которых с высокой достоверностью идентифицируется касание щупом ростка свеклы. Микропроцессорный блок (МПБ) осуществляет обработку сигналов датчиков и выдачу результатов на монитор и БУ ИМ. Блок питания (БП) обеспечивает напряжениями соответствующих уровней все узлы устройства.
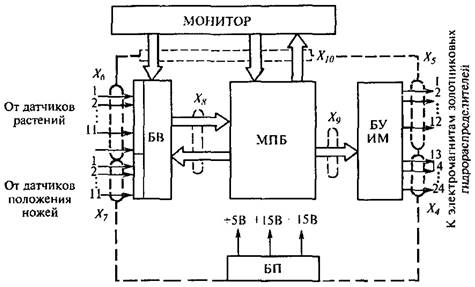
Рисунок 38.4 – Схема устройства системы автоматического управления прореживателями сахарной свеклы
1.4 Автоматическое управление положением фрезы используют при обработке приствольных полос в садах, для отвода фрезы от стволов деревьев (кустов). Отвод фрезы 1 (рисунок 38.5) осуществляет гидроцилиндр 2 при соприкосновении щупа 8с деревом или кустом. Щуп поворачивается по ходу часовой стрелки и замыкает контакты 5. В результате этого срабатывает электромагнит УА1, открывая окна а и б гидрозолотника, через которые масло под давлением поступает в верхнюю полость гидроцилиндра 2.
Шток поршня поворачивает фрезу 7 до тех пор, пока не разомкнется конечный выключатель 10 и замкнется выключатель 9. При этом электромагнит УА1 отключается, окна а и 6 гидрозолотника 3 закрываются поршнями под действием пружин, фиксируя фрезу в отведенном состоянии. После обхода фрезой препятствия щуп 8 под действием пружины 6 возвращается в исходное состояние и замыкает контакты 4, что приводит к срабатыванию электромагнита УА2 и открыванию окон а и б золотника. При этом масло поступает через окно б в нижнюю полость силового гидроцилиндра 2, а фреза занимает рабочее положение, при котором размыкается конечный выключатель 9 и окна гидрозолотника перекрываются его поршнями.
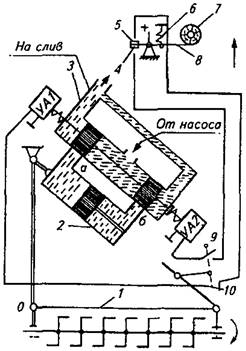
1, 7 – фрезы; 2 – гидроцилиндр; 3 – гидрозолотник; 4 и 5 – контакты; 6 – пружина; 8 – щуп; 9, 10 – выключатели
Рисунок 38.5 – Схема устройства для управления положением фрез
1.5 Автоматическое управление положением остова зерноуборочного комбайна при работе на склонах позволяет сохранять параллельность хедера комбайна относительно поверхности почвы, а также горизонтальность положения его молотильного барабана и очистительных устройств.
При работе комбайна без автоматики на поперечных склонах (с уклоном более 8°) технологическая масса скапливается на наклонной стороне комбайна, вследствие чего нарушается ТП обмолота зерна (увеличиваются до 30 % недомолот и повреждаемость зерна), а также нередки случаи забивания молотильных барабанов хлебной массой. Для выравнивания остова комбайна на склонах его корпус устанавливают на параллелограммной ходовой части 4 (рисунок 38.6), которую оборудуют гидросистемой управления. При наклоне корпуса 1 комбайна, например влево, его массивный маятник 3 также отклоняется влево и открывает окна а и б золотника 5. Масло от насоса под давлением поступает через окно а в верхнюю полость силового гидроцилиндра. При этом его поршень и шток, жестко связанный с параллелограммной ходовой частью 4 комбайна, поворачивает его остов до горизонтального положения, при котором поршни гидрозолотника иод действием вертикального маятника перекрывают окна гидрозолотника и фиксируют положение силового гидроцилиндра. Демпфирующие устройства 2 исключают ложные срабатывания системы автоматического управления при кратковременных толчках и отклонениях остова комбайна от горизонтального положения.
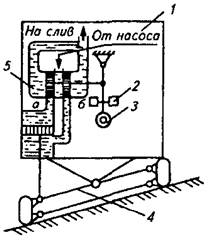
1 – корпус комбайна; 2 – демпфирующее устройство; 3 – маятник; 4 – ходовая часть; 5 – золотник
Рисунок 38.6 – Схема устройства для выравнивания остова комбайна
Они позволяют оптимизировать технологические, энергетические и эксплуатационные параметры функционирования MCA. В частности:
Автоматическое управление загрузкой рабочих органов уборочных комбайнов способствует повышению качества и эффективности ТП, уменьшению потерь технологического продукта и расхода топлива, а также улучшению условий труда операторов.
Такое управление (рисунок 38.7) осуществляют автоматическим регулированием скорости (в зависимости от загрузки рабочих органов машин) поступательного движения комбайнов (зерно-, свекло-, картофелеуборочных), посредством изменения передаточного отношения трансмиссии (гидрообъемной, вариаторной) 2, передающей вращающий момент от вала двигателя (гидравлического, дизельного) 1 комбайна на привод ведущих колес 3. Например, при увеличении (относительно заданного) количества технологической массы (хлебной, корнеклубнеплодной), поступающей на входные рабочие органы 4 комбайна, полозковый датчик толщины слоя такой массы замыкает свои контакты 5 и включает электромагнит УА1, сердечник которого, перемещая вверх шток с поршнем гидрозолотника 6, открывает его окна для подачи в силовой гидроцилинлр и слива из него масла. При этом масло от насоса под давлением через верхнее окно поступает в верхнюю полость силового гидроцилиндра 7, поршень которого вместе со штоком передвигается вниз. В результате чего увеличивается передаточное отношение трансмиссии и комбайн снижает скорость движения, что вызывает уменьшение (до оптимальной) подачи технологической массы в уборочный комбайн. Соответствующее изменение положения щупа вызовет размыкание контактов 5 датчика толщины слоя, после чего поршни гидрозолотника 6 под действием пружин перекроют его окна. При уменьшении (относительно заданного) количества технологической массы, поступающей на входные рабочие органы комбайна, принцип работы системы управления идентичен вышеизложенному. При этом выключается электромагнит УА2, масло от насоса через нижнее окно гидрозолотника поступает в нижнюю полость гидроцилиндра 7, уменьшается передаточное отношение трансмиссии и комбайн увеличивает скорость движения, что вызывает увеличение (до оптимальной) подачи технологической массы в комбайн.
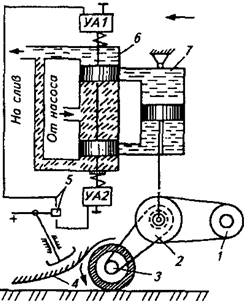
1 – вал двигателя; 2 – трансмиссия; 3 – ведущие колеса; 4 – входной рабочий орган; 5 – контакты;
6 – гмдрозолотник; 7 – силовой гидроцилиндр; УА1, УА2 – электромагниты Рисунок 38.7 – Схема устройства для управления загрузкой комбайна УРОК №39. АВТОМАТИЗАЦИЯ ЗЕРНОПУНКТОВ
Комплекс КЗС-20Ш предназначен для послеуборочной обработки зерновых, зернобобовых и крупяных культур. Комплекс состоит из зерноочистительного и сушильного отделений (рисунок 39.1).
Рисунок 39.1 – Технологическая схема комплекса КЗС-20Ш
Зерноочистительное отделение включает в себя завальную яму 17, автомобилеподъёмник 16, загрузочную двухпоточную норию 5, машину первичной очистки зерна 6, воздушно-решетные машины 4, триерный блок 1, централизованную аспирационную систему 3, передаточные транспортеры 2, транспортер отходов 19, комплект зернопроводов и блок бункеров: очищенного зерна 22, отходов 21, фуража 20 и резервный 18. Все машины и пульты управления смонтированы на блоке бункеров, которые одновременно служат несущей конструкцией и емкостями для промежуточного хранения обрабатываемого зерна.
Сушильное отделение имеет сушилку СЗШ-16 с двумя шахтами 10, 12, пять норий 7, 9, 11, 13, 15, охладительные колонки 8, 14 и станцию управления. Очистительное и сушильное отделения технологически связаны между собой зернопроводами.
Технологией и электрической схемой управления предусматривается возможность работы комплекса по семи различным вариантам: параллельно или последовательно, с участием в работе всех или отдельных машин. Зерно из кузова автомобиля с помощью автомобилеподъёмника 16 выгружают в завальную яму 17, откуда загрузочной норией 5 оно транспортируется в машину предварительной очистки 6, а затем нориями 11 и 13 – в шахты сушилки 10 и 12. Из сушилки высушенное зерно подается с помощью норий 9 и 15 в охладительные колонки 8 и 14 для охлаждения наружным воздухом, а затем норией 7 направляется на воздушно-решетные машины 4 для дальнейшей очистки и транспортерами 2 на триерные блоки 7 для сортирования.
Очищенные семена и отходы поступают в соответствующие секции блока бункеров. Зерносушилка СЗШ-16 имеет две шахты. При влажности зерна до 20 % поток зерна разделяется и одновременно проходит через обе шахты. При влажности свыше 20 % весь поток проходит обе шахты последовательно. При параллельной работе шахт зерно нориями 11 и 13 равномерно и одновременно распределяется по двум шахтам. Высушенное и охлажденное зерно норией 7 подается в резервный бункер 18, откуда самотеком поступает во вторую ветвь загрузочной нории 5.
При последовательной работе шахт зерно из машины первичной очистки 6 норией 13 направляется в шахту 12. Просушенное зерно разгрузочной кареткой выгружается в норию 15 и перемещается в охладительную колонку 14. Охлаждённое зерно шлюзовым затвором выгружается из колонки 14 и направляется норией 11 в шахту 10 сушилки. После сушки во второй шахте зерно норией 9 подается в охладительную колонку 8, откуда через шлюзовой затвор порционно выгружается норией 7 в резервный бункер 18, а затем загрузочной норией 5 подаётся на очистку.
В воздушных каналах от зерна отделяются лёгкие примеси и по системе воздуховодов выносятся в осадочную камеру централизованной аспирационной системы 3, где примеси выводятся в секцию отходов, а очищенный воздух вентилятором выбрасывается наружу.
В воздушно-решетных машинах зерновая смесь делится на три фракции: очищенные семена, фуражное зерно и отходы. Очищенные семена передаточными транспортерами 2 подаются на триерные блоки 7, где они дополнительно очищаются от длинных и коротких примесей, не отделившихся в воздушно-решетных машинах.
В зависимости от назначения и степени засоренности зерна триерные блоки настраивают на параллельную или последовательную работу цилиндров. Чистые семена и фракции очистки системой зернопроводов направляются в соответствующие бункера.
Принципиальная электрическая схема управления очистительным отделением комплекса КЗС-20Ш приведена на рисунке 39.2. В зависимости от количества и засоренности зерновой массы устанавливают соответствующее положение переключателей SA1 и SA2, которыми задаётся режим работы оборудования по семи различным вариантам: при переводе переключателя SA1 в положение 3 возможна работа всех машин предварительной, воздушно-решетной и триерной очистки, а также отдельная работа первой или второй линии машин в зависимости от включения переключателя SA2 (положение 1 или 2). Если переключатель SA1 находится в положении 1, то возможна работа машин в вышеуказанных трёх вариантах, но без триерных блоков. Когда переключатель SA1 в положении 2, работает также машина предварительной очистки.
Для предотвращения завала зерна при пуске и останове машин последовательность пуска электроприводов машин противоположна движению зерна, а последовательность остановки совпадает с потоком зерна. В качестве примера рассмотрим работу схемы при включении машин по основному варианту, когда включаются все машины. Сначала включают автоматы QF...QF5, переключатель SA1 ставят в положение 3, a SA2 в положение 2 и кнопкой SB19 подают предупредительный звуковой сигнал НА о пуске машины, а затем кнопкой SB2 включают в работу электропривод M1 (мощностью 14 кВт) централизованной аспирационной системы 3 (см. рис. 1). После этого кнопками SB4 (см. рисунок 39.2) и SB6 включают электроприводы М2 и МЗ (мощностью по 2,2 кВт) двух блоков триеров 1. Передаточные транспортёры 2 и воздушно-решетные машины 4 работают от электроприводов соответственно М4, М5 (по 1,5 кВт) и Мб, М7 (по 1,1 кВт). Их включают кнопками SB8, SB 12 и SB10, SB 14 после замыкания блок-контактов KМ2:2 и KМ3:2 в цепях магнитных пускателей КМ4...КМ7. Только после этого можно включить кнопкой SB 16 через блок-контакты KМ6:2 или KМ7:2 электроприводы М8 (3 кВт) нории 7, М9 (1,1 кВт) машины предварительной очистки 6 и М10 (1,5 кВт) транспортера отходов 19, а затем кнопкой SB18 – электропривод М11 (4 кВт) загрузочной нории 5. Автоматы заслонки нории АЗН1 и АЗН2 открываются автоматически от блок-контактов KМ11:2.
Останавливают машины в обратной последовательности, нажимая кнопки «Стоп» SB17…SB1. В случае переполнения бункеров 18, 20, 21 и 22 переключаются контакты датчиков уровня SL1...SL4 и включается звуковой сигнал НА, а соответствующие сигнальные лампы HL11…HL14 гаснут.
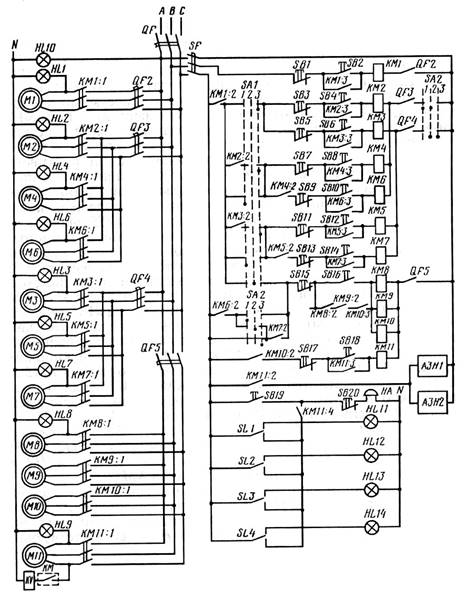
Рисунок 39.2 – Принципиальная электрическая схема дистанционного управления и сигнализации очистительно-сушильного комплекса КЗС-20Ш
Задание: выполнить анализ принципиальной электрической схемы управления комплексом КЗС20Ш (таблица 39.1), выбрать элементы схемы.
Таблица 39.1 – Анализ принципиальной электрической схемы управления комплексом КЗС-20Ш
|
Позиционное обозначение |
Наименование элемента |
Назначение элемента |
|
QF |
Автоматический выключатель |
Защита от аварийных режимов работы |
|
|
|
|
|
|
|
|
В поточных линиях послеуборочной обработки зерна в основном используют шахтные зерносушилки, отличающиеся от барабанных сушилок хорошей управляемостью.
Шахтная зерносушилка СЗШ-16 состоит из двух параллельно расположенных шахт, двух охладительных камер, вентиляторов и воздуховодов. Загрузка сырого зерна и перегрузка пересушенного в охладительные камеры обеспечивается четырьмя порциями.
Шахта сушилки состоит из двух секций, поставленных одна на другую. Внутри шахты расположены 14 рядов коробов, по восемь коробов в каждом ряду. К наружным стенкам шахт присоединяют всасывающие воздуховоды вентиляторов, подача сушильного агента производится в диффузор, образованный пространством между шахтами. Над каждой шахтой установлен подсушильный бункер, излишек зерна из которого ссыпается в бункер нории для сырого зерна.
Зерно из шахт выгружается непрерывно действующим устройством через восемь лотков.
Охладительная камера состоит из двух вертикальных цилиндров с перфорированными стенками и конусным дном, шлюзового затвора и вентилятора. Эффект охлаждения создается за счёт движения наружного воздуха через стенку наружного цилиндра, слой зерна во внутренний цилиндр и оттуда – в атмосферу.
Зерносушилки характеризуются большим количеством входных и выходных параметров. Основные выходные параметры процесса – влажность w3K (рисунок 40.1) и температура θЗК на выходе из зерносушилки, а также некоторый показатель Э, определяющий эффективность работы зерносушилки (производительность, стоимость обработки или другой технико-экономический критерий). При этом текущее значение θ3 к не должно быть более θтах во избежание ухудшения качества продукта (снижения всхожести и т. п.). К числу выходных параметров агента, непосредственно влияющих на основные регулируемые параметры w3 к и θ3 к, относят также и температуру сушильного агента θа.
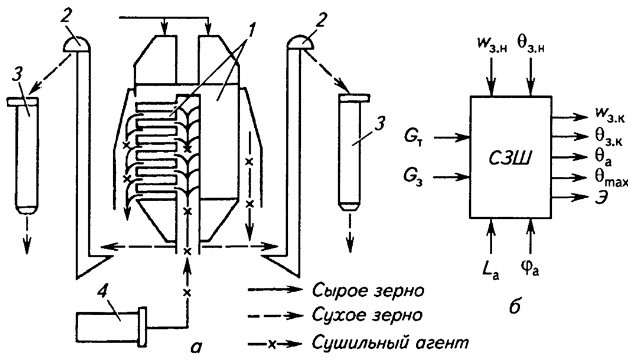
1 – шахты зерносушилки; 2 – нории; 3 – охладительные колонки; 4 – теплогенератор; w3 к, θ3 к – влажность и температура зерна на выходе; θтах – максимально допустимая температура зерна; La, θа и φа – расход, температура и влажность сушильного агента; GT, G3 – подача топлива и зерна; θ3 н, w3 н – температура и влажность зерна на входе; Э – критерий эффективности процесса
Рисунок 40.1 – Функциональная (а) и параметрическая (б) схемы шахтной зерносушилки
В качестве регулирующих воздействий используют изменение подачи топлива GT и зерна G3. Остальные входные параметры, в том числе начальные влажность w3H и температура θЗН зерна, расход сушильного агента La и его влажность φа, относятся к группе возмущающих воздействий.
Шахтная зерносушилка как объект автоматизации характеризуется сложностью взаимных связей между входными регулирующими и возмущающими воздействиями и регулируемыми параметрами.
Управление зерносушилкой должно быть оптимальным с точки зрения выбранного показателя эффективности Э. Поскольку зерносушилка действует в едином технологическом потоке и оптимальное управление ею должно соответствовать наиболее эффективной работе предприятия, то искомый показатель следует выбирать из совокупности частных показателей (критериев) и в первую очередь таких, как критерий максимума производительности сушилки и отклонений влажности конечного продукта от кондиционных норм. Эти показатели связаны между собой, так как повышение производительности приводит к увеличению конечной влажности.
Автоматическое регулирование температуры сушильного агента θа осуществляется изменением подачи топлива в форсунку топки (рисунок 40.2) или подачи наружного воздуха вентилятором. Передаточная функция объекта W1(р) по каналу GT → θа характеризуется относительно небольшой постоянной времени (260 с) и запаздыванием (60 с).
Чувствительный элемент регулятора может быть установлен непосредственно после топки. Тогда регулирование температуры сушильного агента по зонам сушки осуществляют изменением подачи наружного воздуха.
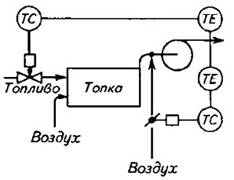
Рисунок 40.2 – Функциональная схема автоматизации управления температурой сушильного агента
Задание регулятору целесообразно корректировать в зависимости от начальной влажности зерна w3 н. Это можно делать автоматически или вручную, но не чаще, чем измерять влажность поступающего зерна (примерно 1 раз в 1,5 ч).
Автоматическое регулирование максимально допустимой температуры нагрева зерна 0 происходит за счет поддержания температуры сушильного агента в последней зоне сушки, точнее в предпоследнем ряду коробов сушильной камеры, вследствие изменения подачи наружного воздуха (рисунок 40.3).
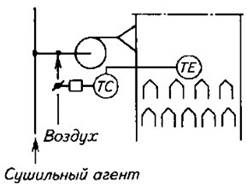
Рисунок 40.3 – Функциональная схема автоматизации управления максимальной температурой нагрева зерна
Автоматическое регулирование влажности зерна w3K обеспечивается изменением производительности сушилки GK засчет изменения положения выпускного механизма (рисунок 40.4). Передаточная функция (р) объекта по каналу GK → wзк характеризуется большой инерционностью (постоянная времени 1500...1800 с, запаздывание 600...1320 с), поэтому в условиях активно действующих возмущающих воздействий следует принять ПИ-закон регулирования. Еще больший эффект следует ожидать от использования системы самонастройки регулятора к изменяющимся условиям, вызванным переменными факторами работы, главным образом начальной влажностью зерна.
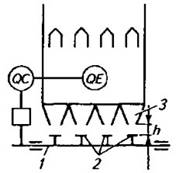
1 – каретка; 2 – полки; 3 – выходные лотки
Рисунок 40.4 – Структурная схема системы регулирования конечной влажности
В качестве регулирующего воздействия можно использовать изменения расхода сушильного агента La, но при этом будет изменяться также и производительность сушилки.
Обычные требования к регулирующим органам (достаточный диапазон изменения регулирующего воздействия и линейность характеристик) в данном случае обеспечить не просто. Наилучшие возможности в этом плане имеет выпускной механизм сушилки СЗШ-16А, расположенный в нижней части шахты. Он представляет собой каретку 1 (рисунок 40.4) с закрепленными на ней полками 2, перекрывающими сечение выходных лотков 3 шахты. Производительность сушилки регулируют, изменяя зазор h между полками и выходными лотками. При этом предполагается, что подача зерна в приемный бункер сушилки превышает его расход, в результате чего часть зерна возвращается самотеком в исходный бункер. Многократное перемещение зерна транспортирующими механизмами приводит к их нерациональной загрузке и, главное, травмирует зерно. Указанных недостатков лишена система автоматической стабилизации уровня зерна в приемном бункере с помощью двухпозиционного регулятора, управляющего норией загрузки. Для контроля уровня на приемном бункере установлены два датчика мембранного типа.
Конечную влажность зерна можно контролировать с помощью диэлько- или кондуктометрического влагомера. При этом необходима коррекция показаний прибора в зависимости от температуры зерна. Комбинированный преобразователь, измеряющий влажность и температуру, устанавливают в потоке зерна ниже зоны нагрева. Измеритель влажности включают в мостовую схему, питаемую переменным напряжением частотой более 1 МГц. Сигнал разбаланса мостовой схемы корректируется в зависимости от температуры зерна, усиливается и может быть использован для изменения производительности сушилки. Результаты измерения влажности зерна на входе в сушилку могут быть использованы в системе комбинированного регулирования для коррекции управляющего воздействия.
Градуировочные характеристики измерительного преобразователя влажности зерна зависят от его вида. Алгоритм коррекции хранится в запоминающем устройстве влагомера. Обслуживающее влагомер вычислительное устройство способно хранить данные по каждому режиму сушки, включая расход топлива, производительность сушилки и др.
|
|
Видеоматериалы к занятию |
Современные технические средства позволяют существенно усовершенствовать контроль параметров очистки и сортировки зерна, а также обеспечить качественное управление этими технологическими процессами. Например, потери зерна можно контролировать с помощью индикатора, выполненного в виде пьезоэлектрического элемента и наклеенного на текстолитовую мембрану. При ударе зерна в мембрану пьезоэлемент вырабатывает быстрозатухающий электрический сигнал. Его амплитуда и длительность зависят от силы удара, что позволяет ему не реагировать на удары легких фракций (половы, соломы). Индикатор имеет выходы на стрелочный прибор и светозвуковую сигнализацию. Его преобразователи устанавливают в местах выхода крупных и легких отходов.
Загрузка воздушно-решетной машины вторичной очистки может быть стабилизирована работой системы автоматического регулирования (САР), воздействующей на шиберное устройство промежуточного бункера зерна. Загрузку машины измеряют расходомером зерна РЗ (рисунок 41.1), лоток которого перемещает плунжер дифференциального трансформаторного измерительного преобразователя ДР.
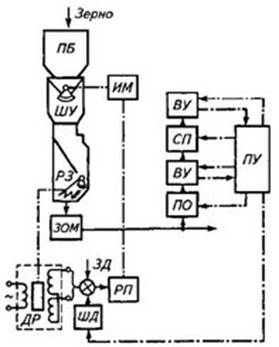
ПБ — промежуточный бункер; ШУ – шиберное устройство; РЗ – расходомер зерна; РП – регулирующий прибор; ИМ – исполнительный механизм; ДР – датчик расходомера; ПО – пробоотборник;
ВУ – весоизмерительное устройство; СП – сепаратор; ПУ– программное устройство; ШД – шаговый двигатель; ЗД – задатчик
Рисунок 41.1 – Функциональная схема регулирования загрузки и чистоты продукта зерноочистительной машины ЗОМ
Принцип действия системы регулирования чистоты зерна в следующем. Обрабатываемое зерно поступает в зерноочистительную машину ЗОМ из промежуточного бункера ПБ через шибер ШУ и расходомер регулятора загрузки РЗ. Регулятор стабилизирует загрузку машины на уровне, установленном задатчиком ЗД. Периодически, через заданные промежутки времени, программным устройством включается анализатор чистоты зерна. Его пробоотборник ПО отбирает из потока зерна на выходе из машины пробу и помещает её в весоизмерительное устройство ВУ. По достижении заданной массы пробы в работу включается сепаратор СП. Чистое зерно взвешивается ВУ, и результат сравнивается с заданным значением, соответствующим кондиционному зерну. Если масса пробы ниже (выше) заданной, то загрузка машины уменьшается (увеличивается) за счёт соответствующей коррекции задания регулятору загрузки. Описанный алгоритм коррекции периодически повторяется по команде программного устройства ПУ.
Зерноочистительные агрегаты типа ЗАВ предназначены для тех зон страны, где влажность зерна в период уборки не превышает 16% и нет необходимости в его искусственной сушке.
Базовая модель – зерноочистительный агрегат ЗАВ-20 (рисунок 41.2) производительностью 20 т/ч продовольственного и 10 т/ч семенного зерна – состоит из строительной части, включающей завальный бункер 2, приямок нории, фундаменты под опоры металлической арматуры агрегата, площадку для установки автомобилеподъемника 1, пандус для въезда автомашин на автомобилеподъёмник, и набора машин и оборудования, куда входят автомобилеподъёмник 1, загрузочная нория 3, две воздушно-решетные зерноочистительные машины 4, два триерных блока 7, централизованная воздушная система 5 с пневмотранспортёром, два передаточных транспортера 6 и 8, пульт управления с системой автоматического контроля уровней фракций в секциях блока бункеров, зернопроводы, блок бункеров с опорами и арматурой перекрытия. Блок бункеров объединяет бункер очищенного зерна 9, секцию отходов 10, секцию фуража 11 и бункер резерва 12.
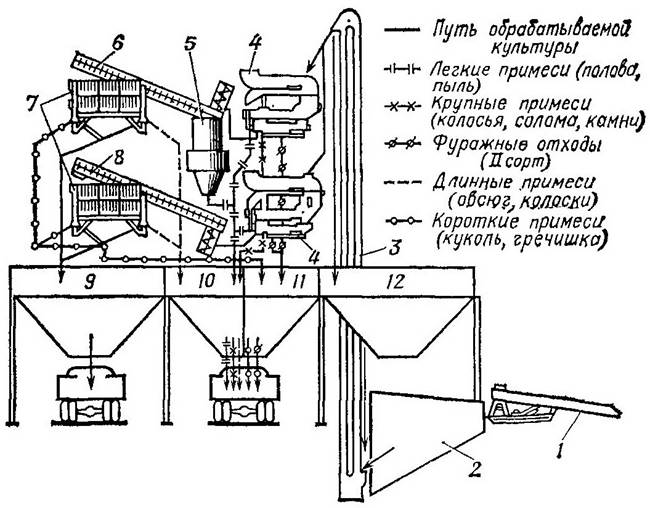
1 – автомобилеподъёмник; 2 – завальный бункер; 3 – нория; 4 – воздушные решетные машины; 5 – централизованная воздушная система агрегата; 6, 8 – транспортеры; 7 – триеры; 9 – бункер чистого зерна;
10 – секция отходов; 11 – секция фуража; 12 – бункер резерва
Рисунок 41.2 – Технологическая схема зерноочистительного агрегата ЗАВ-20
Все машины и оборудование увязаны между собой по производительности и смонтированы на блоке бункеров, к которому крепится перекрытие. Расстановка технологического оборудования агрегата ЗАВ-20 и блокировка пульта управления позволяют работать по шести различным технологическим схемам. Основная схема при очистке на двух параллельных линиях: воздушно-решетная очистка – триерная очистка – блок бункеров. Из автомобиля зерно выгружается автомобилеподъёмником 1 с двигателем мощностью 4,5 кВт в завальный бункер 2. Через окно бункера оно поступает в нижнюю головку загрузочной нории 3. Количество поступающего зерна регулируют заслонкой, которой управляет механик со своего рабочего места. Нория поднимает зерно наверх, где распределительный клапан разделяет его на две равные части, и по зернопроводам поступает в приемные камеры двух параллельно работающих воздушно-решетных машин 4.
Система распределительных клапанов и устройств направляет зерно на воздушно-решётные машины в бункер резерва. Из приемных камер машин зерновой материал при помощи питающих валиков с подпружиненными клапанами подается в воздушные каналы, подключенные системой воздуховодов к централизованной воздушной системе 5 агрегата. Излишек зернового материала из приемных камер сбрасывается в бункер резерва 12.
В воздушных каналах выделяются легкие примеси, которые по системе воздуховодов поступают в осадочную камеру централизованной воздушной системы. Из камеры воздух, очищенный от примесей вентилятором, попадает в атмосферу, а примеси – в секцию отходов 10. Очищенный от легких примесей зерновой материал подается на решетную очистку машин и здесь делится на три фракции: очищенное, фуражное зерно и примеси. Очищенное зерно поступает в шнековые боковые питатели передаточных транспортеров 6 и 8, а из них по наклонным желобам в триерные блоки 7. Фуражное зерно и примеси через воронки и систему зернопроводов направляются в соответствующие бункера.
Очистка зернового материала триерными цилиндрами может быть настроена на отделение длинных примесей, а при необходимости еще и коротких. Очищенное зерно и длинные примеси по зернопроводам самотеком поступают соответственно в бункер чистого зерна 9 и секцию отходов 10. Фуражные отходы пневмотранспортёр подает через отстойник примесей в секцию 11.
Другие схемы работы агрегата составляют часть основной схемы. Например, при малом поступлении зерна или неисправности одной из машин может действовать только первая или вторая линия. В зависимости от назначения зерна все схемы могут работать без триеров. Если наблюдаются перебои в подвозе зерна, используют зерно из резервного бункера.
Агрегаты производительностью 5 и 10 т/ч однопоточные и имеют двухсекционный блок бункеров. В агрегате производительностью 40 т/ч перед триерными блоками по технологической цепочке установлен центробежно-пневматический сепаратор, а в конце – четырёхсекционный блок бункеров.
Управление электроприводами ЗАВ-20. Принципиальная электрическая схема управления агрегатом приведена на рисунке 41.3. Машинами и механизмами агрегата управляют дистанционно с пульта. В схеме предусмотрены цепи блокировок и сигнализации. Блокировочные электрические связи между отдельными машинами позволяют при аварийном и случайном выходе из строя одной из машин автоматически выключить все предыдущие машины и механизмы технологической линии. Сигнализация облегчает наблюдение за ходом процесса и работой оборудования.
Перед пуском зернопункта выбирают в соответствии с требуемой технологией номер технологической схемы и ставят универсальный переключатель SA в определённое положение (таблица 41.1).
Таблица 41.1 – Последовательность включения магнитных пускателей агрегата ЗАВ-20
|
Положения рукоятки SA |
Последовательность включения магнитных пускателей КМ |
Технологическая схема |
|
1 |
1, 4, 5, 6, 7, 8 |
Линии №1 и №2 без триеров |
|
2 |
1, 3, 6, 7, 8 |
Линия №2 с триером |
|
3 |
1, 6 7, 8 |
Линия №2 без триера |
|
4 |
1, 2, 3, 4, 5, 6, 7, 8 |
Линии №1 и №2 с триерами |
|
5 |
1, 4, 5, 8 |
Линия №1 без триера |
|
6 |
1, 2, 4, 5, 8 |
Линия №2 с триером |
|
7 |
Произвольная |
– |
Кнопкой SBC подают сигнал, кнопкой SB2 пускают выбранную технологическую линию в последовательности, определяемой таблицей 10.2. Например, технологическую схему № 4 пускают следующим образом. Кнопкой SB2 включают пускатель KМ1, в работу вступает двигатель вентилятора мощностью 14 кВт. Замыкающие блок-контакты KМ1 закрываются и кнопками SB4 и SB6 вводят в действие блоки триеров 7 (рисунок 39.2) с двигателями мощностью 3 кВт каждый.
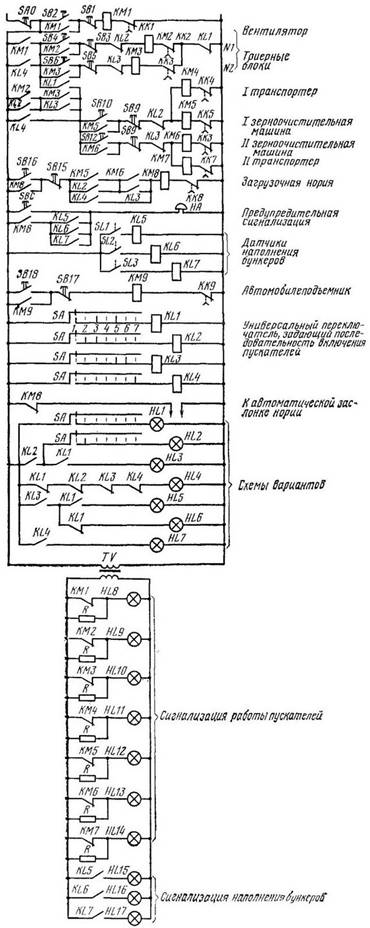
SA0 – кнопка аварийной остановки; SB1...SB16 – кнопки управления; KL1... KL7 – промежуточные реле; SLI...SL3 – датчики наполнения бункеров; SA – универсальный переключатель; HL1…HL17 – сигнальные лампы; KM1…KM9 – магнитные пускатели
Рисунок 41.3 – Схема управления и сигнализации агрегата ЗАВ-20
Закрываются блок-контакты KМ2 и KМ3 (рисунок 41.3) в цепи пускателей KМ4 и KМ5, KМ6 и KМ7, начинают работать обе зерноочистительные машины №4 с двигателями мощностью по 1,1 кВт и транспортеры, передающие зерно в блоки триеров, с двигателями по 3 кВт. После закрытия контактов KМ5 и KМ6 оказывается возможным пустить в ход двигатель загрузочной нории мощностью 3 кВт. Другие технологические потоки вступают в работу аналогичным образом.
После пуска нужной технологической линии открывают задвижку завального бункера, начинается обработка зерна. Привод заслонки может быть ручным и электрическим с автоматическим управлением. При остановке машин первым закрывается приемное окно загрузочной нории. Электровинтовой затвор приёмного окна приводится в действие двигателем мощностью 0,6 кВт при 1350 об/мин. Вращение от двигателя передается на винт, по которому перемещается гайка со штоком и тягой заслонки. В зависимости от направления вращения заслонка открывается или закрывается. Вручную затвором управляют штурвалом 12 (рисунок 41.4, а), которым через шестерни 6 и 2 вращают винт 18. Этот винт перемещает шток с гайкой и заслонку загрузочного окна нории.
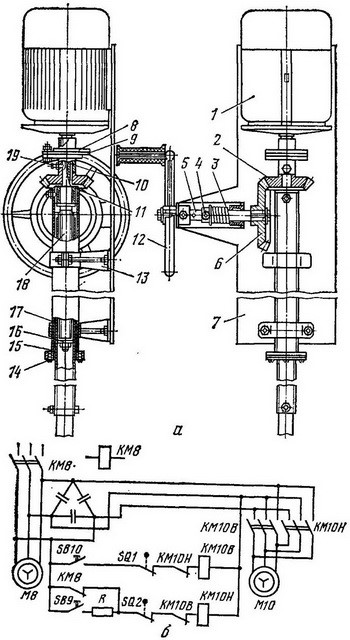 а
– кинематическая схема; б – электрическая схема; 1 – электродвигатель;
2, 6 – шестерни ручного при-
а
– кинематическая схема; б – электрическая схема; 1 – электродвигатель;
2, 6 – шестерни ручного при-
вода; 3 – пружина; 4 – стойка; 5 – вал ручного привода; 7 – плита затвора; 8 – муфта; 9 – резиновая прокладка; 10 – шпонка; 11 – втулка; 12 – ручной привод; 13 – стойка корпуса затвора; 14 – уплотнение;
15 – шток затвора с гайкой; 16 – центрирующий ролик; 17 – цилиндрический корпус затвора; 18 – винт; 19 – штуцер для смазки
Рисунок 41.4 – Электропривод затвора ВНИИМЭСХ
При эксплуатации зерноочистительных агрегатов могут возникнуть аварийные отключения напряжения. Если не предусмотреть специальных мер, двигатели и приводимые ими машины остановятся, затвор же останется открытым и зерно, поступающее самотеком, завалит норию загрузки.
Управление электроприводом затвора в нормальном и аварийном режимах осуществляется по схеме, приведенной на рисунке 41.4, б.
В первый момент после отключения двигателя нории от сети его угловая скорость близка к номинальной. Если к статорной обмотке двигателя М8 подключить батарею конденсаторов, то он начнет работать в генераторном режиме, питая током двигатель затвора М10. В зависимости от емкости конденсаторов и количества кинетической энергии, запасенной в маховых массах системы двигатель – нория, можно получить необходимую длительность работы двигателя в режиме генератора с достаточно устойчивым напряжением, близким к номинальному.
В нормальном режиме кнопкой SB10 напряжение подают на катушку пускателя KM10В, который включает двигатель затвора М10 на открытие. Для закрытия затвора достаточно нажать кнопку SB9. Ход затвора ограничивают конечные выключатели SQ1 и SQ2. Длительность периодов открытия и закрытия затвора составляет 3 с.
При исчезновении напряжения питания агрегата все пускатели приводов машин отключаются. Размыкающие блок-контакты KМ8 подключают катушку KM10Н к зажимам двигателя М8, работающего в режиме генератора. Пускатель KM10Н соединяет двигатель М10 с двигателем М8. Образуется самостоятельная система: двигатель М8, работающий в режиме генератора, и двигатель М10, который начинает действовать и закрывает затвор.
Катушка пускателя KM10Н рассчитана на напряжение 220 В. При нормальной эксплуатации цепи управления подключены к напряжению 380 В, поэтому к катушке KM10Н присоединено добавочное сопротивление R. В случае потери питания это сопротивление шунтируется контактами KМ8, что обеспечивает длительное включение пускателя KM10Н, так как напряжение на двигателе М10 и пускателе KM10Н уменьшается по мере снижения угловой скорости двигателя М8. Для устойчивой работы асинхронного двигателя в режиме генератора необходима емкость
C = (3...4)Cн. (41.1)
Номинальную емкость Cн (мкФ) находят по формуле
Cн =3185I U0н н−1, (41.2)
где I0н – номинальный фазный ток намагничивания двигателя (реактивная составляющая тока холостого хода двигателя), A;
Uн – линейное напряжение, В.
Асинхронный генератор должен работать в течение времени, необходимого для полного закрытия затвора, с напряжением на зажимах не менее 0,7Uн.
|
|
Видеоматериалы к занятию |
Активное вентилирование – продувание массы зерна холодным или подогретым воздухом – наиболее эффективный прием временного хранения (консервирования) влажного зерна. Влажное зерно очень быстро портится при хранении. Из-за увеличенной интенсивности дыхания при повышенной влажности и температуре зерно самосогревается, поражается плесневыми грибками, микроорганизмами и быстро теряет семенные и продовольственные качества. Активное вентилирование, кроме консервации, предупреждает самосогревание, охлаждает и подсушивает зерновые насыпи.
Круглосуточное вентилирование необходимо, если влажность зерна выше 20%, а относительная влажность воздуха не превышает 90%. В дождливую погоду проводят периодическое вентилирование зерна подогретым воздухом в течение 1,5 ч через 4...6 ч.
Для активного вентилирования зерна атмосферным воздухом в колхозах и совхозах используют вентилируемые бункера БВ-6; БВ-12,5; БВ-25, БВ-50 и вентилируемый бункер К-878 фирмы «Петкус» (ГДР). Вентилируемый бункер имеет цилиндрическую форму и выполнен из штампованных перфорированных секций. Внутри бункера находится воздухораспределительная труба (рисунок 42.1). Несколько бункеров объединяют в группы. Зерно засыпают между внутренним и внешним цилиндрами.
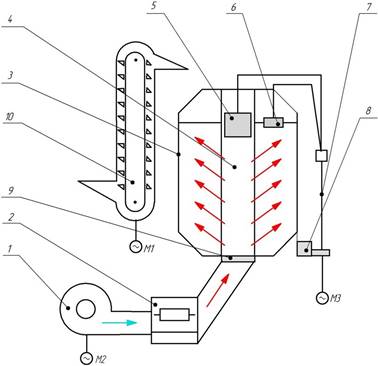
1 – вентилятор; 2 – электрокалорифер; 3 – бункер; 4 – труба; 5 – поршень-заглушка;
6 – датчик положения; 7 – трос; 8 – электропривод поршня-заглушки; 9 – люк; 10 – нория Рисунок 42.1 – Схемы бункера активного вентилирования
В основе сушки вентилированием лежит зависимость так называемой равновесной влажности зерна от относительной влажности воздуха.
Из-за гигроскопических свойств зерно увлажняется при относительной влажности воздуха выше равновесной и подсушивается при влажности воздуха ниже равновесной. Для уменьшения относительной влажности воздуха его подогревают, на каждый 1° нагрева воздуха его относительная влажность снижается примерно на 5%. Обычно воздух при сушке подогревают на 10...12°.
Автоматизация бункеров активного вентилирования зерна предусматривает автоматическое управление загрузкой бункеров, воздухораспределением в бункере, температурой и влажностью зерна и продуваемого воздуха.
Нория загружает зерно в бункер 3, в котором происходит вертикальное и радиальное воздухораспределение рисунок 42.1, а). В центре бункера установлена перфорированная воздухораспределительная труба 4, а внутри нее от электропривода 8 перемещается поршень-заглушка 5. Разгружается бункер самотеком через люк 9.
Вентилятор 1 прогоняет воздух через электрокалорифер 2 и подаёт его в массу зерна. Функциональная схема приведена на рисунке 42.2.
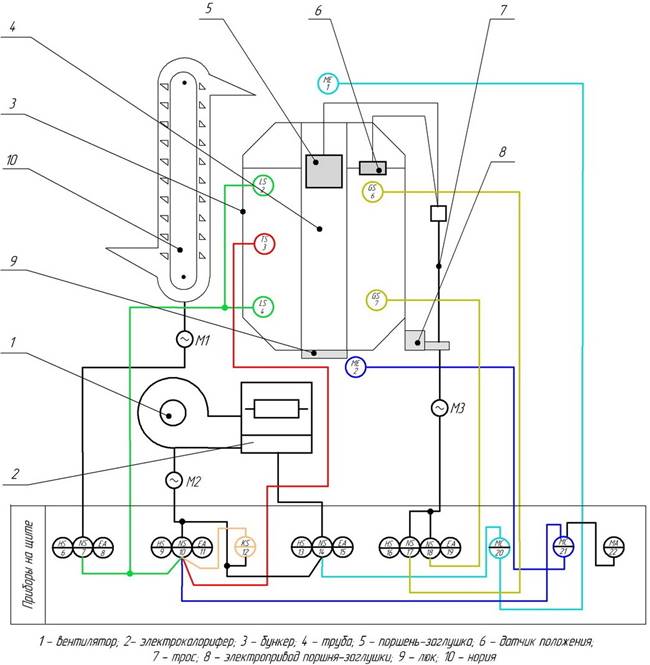
Рисунок 42.2 – Функциональная схема автоматизации бункера активного вентилирования
Автоматизация бункера активного вентилирования зерна выполнена в функциях уровня влажности, температуры, времени и пути. Автоматизация бункеров активного вентилирования зерна предусматривает автоматическое управление загрузкой бункеров, воздухораспределением в бункере, температурой и влажностью зерна и продуваемого воздуха.
Управление электродвигателем M1 загрузочной нории осуществляются при помощи мембранного датчика уровня (позиция 2), посредством которого отключается данный электродвигатель при достижении уровня зерна максимального значения. При этом запустится электродвигатель вентилятора M2. Для отключения электродвигателя M3 поршня-заглушки в крайних положениях используются конечные выключатели (позиции 6 и 7). Влажность зерна на входе контролируется при помощи первичного измерительного преобразователя (позиция 1), подключенного к автоматическому регулятору (позиция 20), который при повышенной влажности даст команду исполнительному элементу (позиция 14) на включение нагревательных элементов. Влажность зерна на выходе контролируется при помощи преобразователя (позиция 2), подключенного к регулятору (позиция 21), управляющему электродвигателем вентилятора M2. Реле времени (позиция 12) позволяет исключить преждевременное отключение вентилятора в том случае, когда при его включении влажность воздуха на выходе ниже равновесной и то выноса влаги не будет. Датчик температуры (позиция 3) позволяет в режиме работы «Консервация» включать электродвигатель вентилятора в том случае, когда температура зерна достигает максимально допустимого значения.
Принципиальная схема управления бункером активного вентилирования зерна изображена на ри-
сунках 42.3 и 42.4.
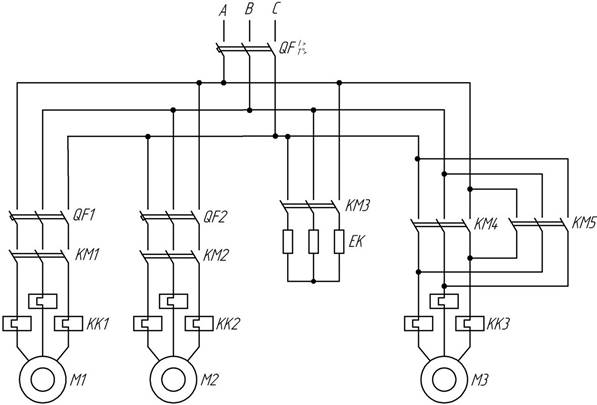
Рисунок 42.3 – Главная цепь схемы управления бункером активного вентилирования зерна
Автоматическая система управления воздухораспределеннем (рисунок 1.1) воздействует на электропривод М, который устанавливает поршень-заглушку в требуемое положение следующим образом. Сигнал на перемещение поршня-заглушки подается от блок-контактов KМ1.1 при пуске загрузочной нории. Блок-контакты KМ1.1 подают питание на катушку KМ4 и двигатель М3, и тот передвигает поршень вверх, пока не разомкнутся контакты конечного выключателя SQ1. Окончание загрузки и отключение нории вызывает замыкание блок-контакта KМ1.2 в цепи включения катушки KМ5 реверсивного пускателя привода заглушки. Теперь заглушка опускается до тех пор, пока датчик 6 положения не коснётся зерна и, разомкнув свои контакты SQ2, не отключит катушку KМ5. При помощи кнопок SB1 и SB2 можно дистанционно управлять электроприводом 8 и связанной с ним тросом 7 заглушкой.
Схема управления загрузкой, температурой и влажностью зерна бункеров активного вентилирования работает следующим образом. Переключатели SA1 и SA2 могут быть установлены в два положения: С – сушка и К – консервация при ручном Р и автоматическом А управлении. Датчики уровня SL1 и SL2 контролируют верхний и нижний уровень зерна в бункере. Норию загрузки пускают кнопкой SB2, в результате чего магнитный пускатель KМ1 подает питание на электропривод M1.
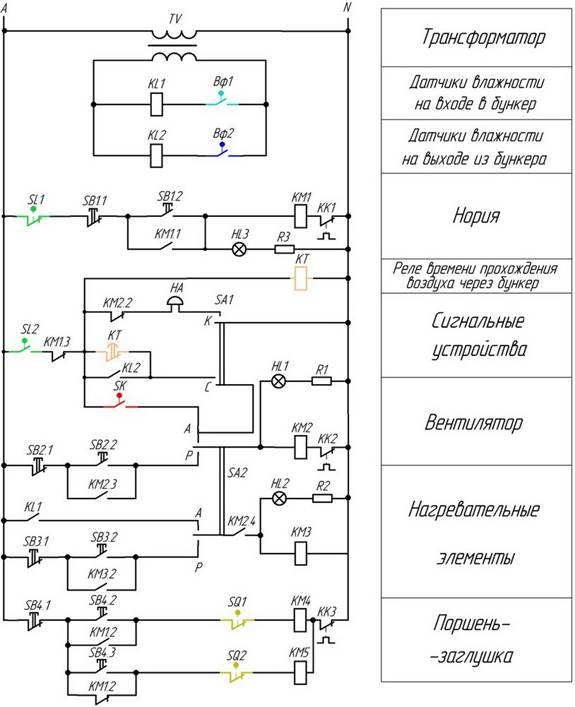
Рисунок 42.4 – Cхемf управления бункером активного вентилирования зерна
Когда уровень зерна в бункере достигает максимального значения, размыкается контакт SL1, из цепи тока выводится пускатель KМ1, который своими блок-контактами КМ1.3 включает реле времени KТ и магнитный пускатель KМ2 электропривода М2 вентилятора (переключатели SA1 и SA2 находятся в положениях соответственно С и А).
Влажность воздуха на входе в слой зерна и выходе из него контролируют влагомерами с контактными датчиками Bφ1 и Bφ2, которые замыкаются при повышенной относительной влажности воздуха соответственно на входе и выходе бункера. Если влажность зерна повышенная, то выносимая воздухом влага замыкает контакты Bφ2, в результате чего срабатывает реле KL2, которое своими контактами включает пускатель KM2 электропривода вентилятора. Процесс сушки продолжается независимо от положения контактов KM до тех пор, пока до установленного значения не снизится вынос влаги из зерна. Тогда размыкаются контакты Bφ2, отключается реле KL2 и лишается питания пускатель KM2 электропривода M2 вентилятора 1. Одновременно размыкающие контакты KM2.2 включают звонок HA, сигнализирующий об окончании процесса сушки.
Если при включении вентилятора М2 влажность воздуха на выходе ниже равновесной, то выноса влаги не будет. В этом случае вентилятор М2 отключается контактами реле времени KТ с выдержкой времени, достаточной для выноса влаги из зерна к датчику Вφ2.
Электронагревательные элементы ЕK калорифера включаются только при работающем вентиляторе, когда высока влажность воздуха на входе в зерно. В этом случае замыкаются контакты Вφ1 влагомера, и реле KL1 включает магнитный пускатель KМ3 калорифера. Отключается калорифер автоматически в результате размыкания контактов Вφ1 при снижении влажности окружающего воздуха.
Чтобы задать режим консервации (хранения) зерна, переключатель SA1 ставят в положение K. В этом случае управление ведётся по температуре зерна, которая контролируется датчиком температуры SK. Если температура зерна достигает максимально допустимого значения, замыкаются контакты SK и магнитный пускатель KM2 включает вентилятор. При этом чтобы снизить (до 65%) относительную влажность воздуха, его пропускают через электрокалорифер. Вручную оборудованием бункера управляют кнопками SB1…SB4, предварительно установив в положение P переключатель SA2.
Переключатели SA2 и SA1 могут быть установлены в два положения:
C – сушка и K – консервация при ручном P и автоматическом A управлении. Датчики уровня SL1 и SL2 контролируют верхний и нижний уровень зерна в бункере. Норию загрузки пускают кнопкой SB2, в результате чего магнитный пускатель KM1 подаёт питание на электропривод M1.
ТЕМА 2.6 АВТОМАТИЗАЦИЯ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Согласно научно обоснованным нормам питания человек должен равномерно в течение всего года потребить от 130 до 150 кг овощей и 120 кг картофеля. Однако суровые климатические условия не позволяют получать овощи из открытого грунта равномерно в течение круглого года. С целью равномерного потребления населением овощей в течение года около 25 % всего их количества должно выращиваться в сооружениях защищенного грунта (теплицах, парниках, утепленном грунте и т. п.).
Теплицы, особенно зимние, представляют собой весьма сложные, дорогостоящие и энергоемкие технические объекты с разветвленными системами электро-, тепло-, водоснабжения и канализации.
На производство 1 кг тепличных овощей в средней полосе расходуется до 200 МДж тепловой и 2,3 кВт∙ч электрической энергии. Механизация и автоматизация ТП в сооружениях защищенного грунта резко сокращают затраты труда и себестоимость продукции, повышают энерговооружённость труда и на 10... 15 % урожайность овощей.
Виды сооружений защищённого грунта
Утеплённый грунт – это необогреваемые и обогреваемые земельные участки, предназначенные для выращивания рассады и ранних овощей. Необогреваемый грунт характеризуется малогабаритными пленочными укрытиями или переносными укрытиями из матов, рогож, пленок, используемых для укрытия огородных грядок на ночь и на период резких похолоданий. В необогреваемом грунте в качестве источника теплоты используется солнечная энергия. В обогреваемом грунте источником теплоты служит солнечная энергия, биотопливо (свежий навоз, растительные отходы), горячая вода или электрическая энергия.
Парники – это полностью или частично заглубленные в почву каркасные сооружения со съёмным светопрозрачным покрытием на небольшой земельной площади, обслуживаемой снаружи. Парники предназначены для выращивания рассады для открытого грунта и получения ранних овощей. Парники, заглубленные на расстояние от 0,4 до 0,8 м, шириной до 1,4 м любой длины изготовляют из деревянных или железобетонных стен и закрывают стеклянными и пленочными рамами стандартного размера
1,06×1,60 м, а на ночь и на период похолодания – дополнительно соломенными матами размером 1,2×2 м при толщине от 50 до 60 мм. Почва в парниках обогревается солнечной энергией, биотопливом, горячей водой или электроэнергией. Наиболее совершенны парники с техническими видами обогрева, позволяющими легче управлять температурой воздуха и почвы в парниках.
Теплицы – это наиболее совершенный и технически оснащенный вид сооружений защищённого грунта. Теплица позволяет при помощи технических средств выращивать растения в любое время года. В отличие от парников все работы по выращиванию овощей в теплице ведут внутри культивационного сооружения. Теплицы предназначены для выращивания ранних и внесезонных овощей, а также рассады для открытого и защищенного грунта.
По виду профиля поперечного сечения зимние теплицы делят на ангарные (однопролётные) и блочные (многопролётные).
Ангарные теплицы представляют собой сооружения площадью 600...3000 м2 с двухскатной арочной светопроницаемой кровлей без внутренних опорных стоек. Несущими опорами для крыши служат металлические или деревянные арки, закрепленные непосредственно на фундаменте или опорных стойках стен теплицы.
Блочные теплицы представляют собой объединение нескольких ангарных теплиц с заменой боковых стен, примыкающих одна к другой, опорными стойками. Стыки крыши смежных секций шириной 6,4 м соединяют желобами, которые являются опорой для элементов кровли и служат для отвода дождевой воды. В целом все секции образуют единое помещение площадью от 1 до 3 га. Благодаря такой компоновке металлические конструкции блочных теплиц изготовляют на заводах. Эти теплицы самые экономичные при строительстве, так как расход металла составляет 7...9 кг/м2. Оптимальная площадь блочной теплицы 1 га, а тепличного комплекса, состоящего из 3...12 отдельных блоков, – 18...60 га.
Преимущества ангарных теплиц – лучшая освещённость, возможность применения почвообрабатывающих и транспортных машин. Но из-за большой высоты и ширины ангарной теплицы площадь светопроницаемых ограждений её завышена, что увеличивает теплопотери. Эти теплицы на 30...35 % дороже, но зато выдерживают большие снеговые нагрузки, не требуют специальных устройств для стаивания снега зимой и хорошо вентилируются летом. Ограждения теплиц выполняют из листового стекла толщиной 4 мм, укладываемого внахлест по металлическим направляющим.
Применяют также двойное остекление и полимерные покрытия достаточной прочности и высокой теплоизолирующей способности. С целью уменьшения теплопотерь используют трансформирующиеся (свёртывающе-развёртывающиеся) экраны из полимерных материалов (акрил). При этом экономия теплоты достигает размера от 30 до 40 %.
По срокам использования теплицы делят на зимние (работающие круглогодично) и весенние (функционирующие с февраля по октябрь). Зимние теплицы в 2...3 раза дороже весенних из-за массивных строительных конструкций и большей насыщенности теплотехническими установками.
Башенные гидропонные теплицы – это многоэтажные стеклянные или светонепроницаемые сооружения высотой от 20 до 40 м при экономном использовании земли. По высоте теплицы сооружен непрерывный конвейер со стеллажами для растений и питательного раствора. При движении конвейера растения на стеллажах в нижнем положении получают минеральную подкормку и увлажнение. Такую теплицу можно строить в любом месте: на бросовых землях или как пристройку к многоэтажному дому в городе.
Растения хорошо развиваются и плодоносят только при оптимальных значениях параметров микроклимата теплиц. Степень механизации и автоматизации технологических процессов в теплицах достаточно высокая.
Около 40 % общих затрат труда приходится на подготовительные работы, которые выполняют при помощи машин: приготовление почвенных смесей; замена, стерилизация и предпосевная обработка почвы; дезинфекция конструкций теплиц; текущий ремонт; предпосевная обработка семян; изготовление питательных кубиков; предпосевное внесение удобрений и т. д. В процессе выращивания и сбора урожая средства механизации и автоматизации используют при посеве семян и уходе за рассадой, поливе и подкормке растений, опылении растений и их защите от болезней, сборе и транспортировке овощей и растительных остатков, а также для управления параметрами микроклимата.
В малых теплицах и парниках уровень автоматизации по контролю и управлению микроклиматом пока невысокий и ограничивается в основном одним параметром – температурой.
На тепличных комплексах промышленного типа площадью от 3 га используют автоматические контроль и управление многими параметрами, а именно: температурой и влажностью почвы и воздуха, содержанием диоксида углерода, степенью освещенности, температурой воды для полива почвы, влажностью воздуха, вентиляцией и скоростью перемещения воздуха в теплице, концентрацией растворов минеральных удобрений почвы, значением рН и др. Для выбора оптимального режима в соответствии с внешними погодными условиями предусмотрено автоматическое слежение за ними (температурой, скоростью ветра и освещенностью) и соответствующее изменение внутренних параметров микроклимата. Средства автоматики также широко используют на вспомогательных установках тепло-, энерго-, водоснабжения и др.
Проектный объём автоматизации ТП в зимних теплицах на примере блока многопролетной теплицы площадью 6 га показан на рисунке 43.1. Допустимые отклонения температуры воздуха в теплице от уровня, заданного агротехническими требованиями, составляют ±1 ºC, относительной влажности воздуха +5 %, температуры воды в системе надпочвенного обогрева ±2 ºC и т. д.
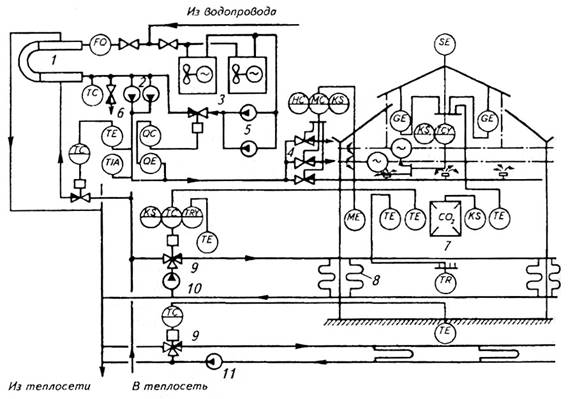
1 – подогреватель поливной воды; 2 – насосы-дозаторы; 3 – растворные баки с мешалками;
4 – клапаны полива; 5 – насосы; 6 – клапан сброса; 7 – генератор CO2; 8 – регистры обогрева;
9 – трёхходовой смесительный клапан; 10 – подмешивающий насос; 11 – циркуляционный насос
Рисунок 43.1 – Схема автоматизации технологического процесса в блоке многопролётной теплицы
Эффективная система обогрева для односкатного парника (рисунок 43.2, а) – электрическая, например, с помощью нагревательного провода, проложенного в грунте (почвенный обогрев 1) и вдоль стенок (воздушный обогрев 2).
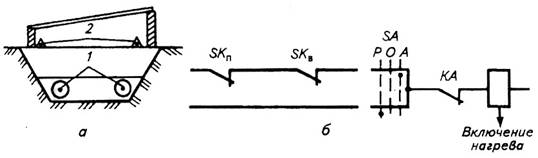
1 – почвенный обогрев; 2 – воздушный обогрев. Условные обозначения: SKп, SKв, SA – переключатели; KA – токовое реле
Рисунок 43.2 – Парник с электрообогревом (а) и схема его автоматизации (б)
Схема управления обогревом парника (рисунок 43.2, б) включает нагреватели с помощью датчиков температуры почвы SKn и воздуха SKB при снижении температуры почвы и воздуха до заданных пределов. Отключаются же нагреватели, как только один из указанных параметров достигает оптимального значения.
С целью ускорения разогрева парника нагреватели могут быть переключены со схемы «звезда» на схему «треугольник». При недостаточной мощности источника электроснабжения рекомендуются схемы, исключающие одновременное включение систем обогрева многих парников.
|
|
Видеоматериалы к занятию |
В ангарных теплицах в основном используется комбинированный обогрев: водяной (почвы и воздуха) и калориферный (воздуха). Основной обогрев обеспечивают греющие регистры, а дополнительный – калориферы. От калориферов подогретый воздух подается по воздуховодам и распределяется вентиляционной системой по всей теплице. Благодаря малой инерционности калориферного обогрева можно с высокой точностью управлять температурой воздуха.
Вентиляция теплицы осуществляется через форточки, расположенные в боковых стенах и на кровле. Увлажнение воздуха происходит путём распыления воды через форсунки, закрепленные в подвешенных в теплице водопроводах на расстоянии примерно 3 м одна от другой. Для сбора и отвода воды, образующейся на конструкциях теплицы при распылении и конденсации влаги, устроены специальные желоба, по которым вода стекает в канализацию. Вода, необходимая для увлажнения воздуха и полива почвы, поступает из водоподогревателя под постоянным давлением, создаваемым насосной станцией. Для полива используют дождевальную установку или шланги. Температура воды должна быть 16...25°С.
В сельском хозяйстве применяют несколько комплектов оборудования для управления микроклиматом теплиц, например АМТ-600, СК-2, ОРМ-1, УТ-12 и др. В качестве примера рассмотрим принцип работы комплекта УТ-12.
Основная элементная база этого комплекта – микропроцессорные логические элементы.
Оборудование комплекта УТ-12 размещено в отдельных шкафах и включает в себя САУ:
– температурой воздуха в теплицах, бытовых помещениях и коридоре;
– температурой почвы;
– температурой поливной воды;
– влажностью почвы и воздуха;
– концентрацией растворов минеральных удобрений;
– подачей диоксида углерода и облучением растений.
Комплект рассчитан на управление указанными параметрами в 12 отделениях теплиц, а также температурой в соединительном коридоре и в бытовых помещениях. Он поддерживает температуру воздуха, почвы и поливной воды с точностью до +1,5 °С в диапазоне заданных температур (0...40 °С) и концентрацию растворов минеральных удобрений. Кроме управления параметрами микроклимата, комплект УТ-12 измеряет и регистрирует их.
В первом шкафу управления ШУ1 (рисунок 44.1, а, б) размещены САУ температурой воздуха и почвы в 12 теплицах, температурой воздуха соединительного коридора и бытовых помещений, а также контрольно-регистрационная система температуры воздуха в 12 теплицах.
Во втором шкафу управления ШУ2 размещены САУ влажностью почвы и воздуха, а также подачей диоксида углерода и облучением растений в 12 теплицах.
В третьем шкафу ШУЗ расположены САУ температурой поливной воды, концентрацией растворов минеральных удобрений, система контроля температуры наружного и внутреннего (в 24 точках) воздуха, а также система контроля скорости ветра.
В четвертом шкафу расположена пускозащитная аппаратура насосов поливной воды и насосов подачи концентрированного раствора минеральных удобрений, а также пускозащитная аппаратура технологических установок приготовления минеральных удобрений и управления температурой воздуха коридора и бытовых помещений.
В пятом шкафу управления установлена промежуточная аппаратура, предназначенная для управления электромагнитными вентилями полива и другим оборудованием теплицы. В соединительном коридоре для каждой теплицы расположены местные шкафы управления оборудованием (ШУО).
В теплице устанавливают панели датчиков температуры и влажности, а также датчики освещенности, скорости ветра, температуры поливной воды, концентрации растворов минеральных удобрений и др.
Электропитание шкафов осуществляется от специальных блоков, подключаемых к трёхфазной
сети 220/380 В.
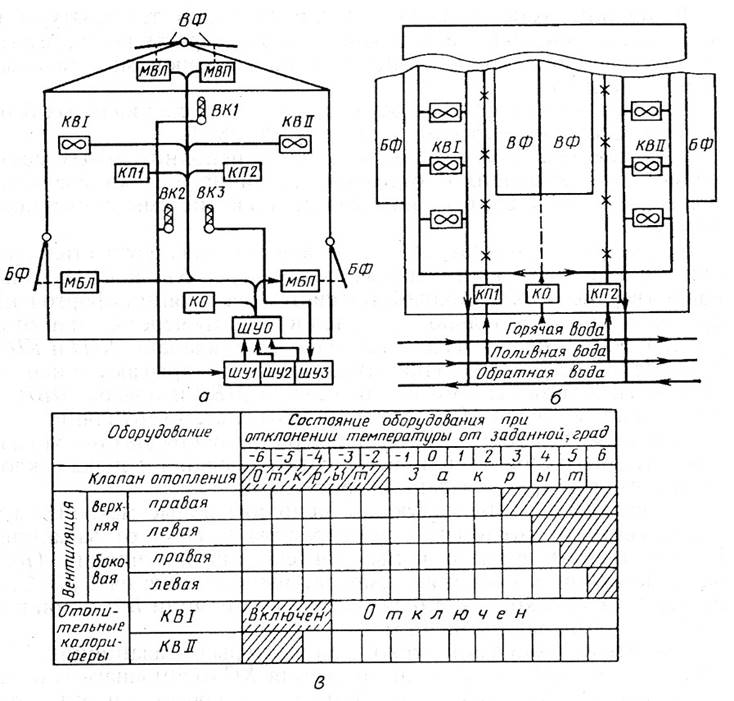
Рисунок 44.1 – Схема размещения оборудования УТ-12 в теплице
(а – вид с торца; б – вид сверху) и последовательность его работы (в)
САУ температурой воздействует на 16 исполнительных механизмов, охватывающих 12 отделений тепличного блока, соединительный коридор, бытовое помещение и две системы почвенного обогрева.
Управление температурой воздуха в теплице осуществляется при помощи двух групп водяных калориферов KBI и КВII, коньковой (верхней) ВФ и боковой БФ систем вентиляции (форточек). Греющая вода из котельной подается в теплицу через клапан отопления КО, а теплая вода для полива – через клапаны КП1 и КП2. Верхние и боковые форточки открываются и закрываются исполнительными механизмами верхней левой МВЛ и правой MBП, a также боковых левой МБЛ и правой МБП систем вентиляции.
Последовательность работы и состояние оборудования управления температурой в теплице зависят от значения и знака отклонения температуры от заданной (рис. 1, в).
СУ включает соответствующие исполнительные механизмы в зависимости от отклонения температуры воздуха от заданной. Правая (левая) верхняя коньковая система вентиляции (ВФ) включается при повышении температуры в теплице на 2 (3) °С, а правая (левая) боковая стенная система вентиляции БФ – при повышении температуры на 4 (5) ºС.
При отклонении фактической температуры от заданной на 1 °С открывается «шагами» клапан отопления КО (один «шаг» за один цикл опроса). При отклонении её на 3 °С включается первая отопительная группа калориферов KBI, а на 4 °С – вторая их группа КВII. При отклонении температуры от заданной на ±6 ºС срабатывают пороговые элементы, включаются аварийные звуковая и световая сигнализации. О значениях отклонений температуры с указанием номера контролируемой теплицы сигнализирует индикатор, выполненный на сигнальных лампах. Заданное значение температуры в 16 объектах устанавливают с помощью задатчиков.
Блок освещения с 12 датчиками автоматически корректирует заданное значение температуры в зависимости от освещенности в 12 теплицах. При освещенности более 10 клк срабатывает реле, контакты которого включают сигнальную лампу и резистор, вызывающий температурную надбавку установки до 5 °С. При снижении освещенности до 10 клк срабатывает другое реле, которое включает сигнальную лампу «Пасмурно» и соответствующую температурную надбавку около 2,5 °С. При низкой освещённости например в ночное время, срабатывает третье реле, которое включает сигнальную лампу и выдает своим контактом задание на управление температурой, соответствующей темному периоду суток. Перевод схемы с автоматического управления на ручное и обратно выполняют в соответствующем местном шкафу управления ШУО. В случае необходимости экстренного закрытия форточек или изменения их положения одновременно во всех 12 теплицах используют соответствующую кнопку. Возможно также автоматическое полное закрытие форточек по команде от анемометра при предельно допустимой скорости ветра. Положения форточек, значения температур вне и внутри теплицы контролируют соответствующие приборы.
Автоматическое управление поливом в ангарных теплицах при помощи оборудования УТ-12 осуществляется раздельно для нижней и верхней систем полива. Вода для полива поступают через нижнюю систему труб, которую используют также для подачи растворов минеральных удобрений. Трубы для полива можно устанавливать на высоте от 0 до 2,2 м.
Поливная вода распределяется по группе труб через электромагнитный вентиль. В каждой теплице установлена группа вентилей, которая поочередно включается на 2...4 мин в одной теплице, затем в другой и т. д.
Увлажнение воздуха в теплице происходит за счет кратковременного (на 10...30 с) открытия вентилей системы труб верхнего полива. Высота подвески системы верхнего полива не изменяется. Воду, используемую для полива и увлажнения, предварительно подогревают до заданной температуры.
Относительную влажность воздуха в теплице регулируют стационарной системой увлажнения (рисунок 56.1, а).
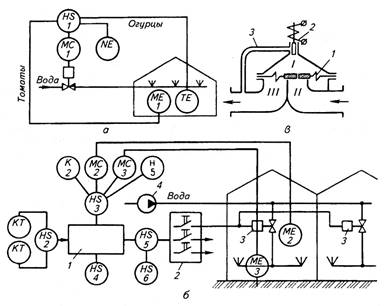 а
– САУ влажностью воздуха: б – САУ влажностью почвы; в – мембранный
вентиль с электромагнит-
а
– САУ влажностью воздуха: б – САУ влажностью почвы; в – мембранный
вентиль с электромагнит-
ным приводом; 1 – обегающее устройство; 2 – переключатель набора программы полива; 3 – мембран-
ный вентиль; 4 – насос поливной воды; в – схема мембранного вентиля: 1 – мембрана; 2 – электромагнит; 3 – канал сброса воды из надмембранной области
Рисунок 56.1 – Функциональные схемы различных САУ и мембранного вентиля:
Режим работы системы увлажнения выбирает оператор с помощью переключателя HS1 в зависимости от выращиваемой культуры: для огурца команда на включение форсунок подается при повышении температуры tвн, для томатов – при понижении φвн, причем заданное значение tвн корректируется в зависимости от уровня естественной освещенности. При снижении уровня освещенности до определенного предела налагается запрет на включение увлажнения.
Средство понижения влажности – «сухое отопление» также выполняется автоматически. В процессе выполнения этой операции сначала повышается температура воздуха и затем открываются форточки, в результате чего нагретый воздух покидает теплицу, унося с собой влагу. На время выполнения операции «сухое отопление» регулятор температуры воздуха блокируют.
Регулятор влажности воздуха NE работает с электролитическим измерительным преобразователем.
К системам управления влажностью воздуха можно отнести систему управления туманообразованием, используемую в процессе черенкования. Измерителем влажности в таких системах служит модель листа или так называемый «электронный лист», изготовленный из неэлектропроводного материала с пленочным смачиванием. Электрическое сопротивление пленки влаги на поверхности «листа» характеризует степень увлажнения укореняемых растений.
Задача систем управления поливом почвы – поддержание влажности почвы в определенных пределах. В некоторых случаях одну и ту же систему используют и для полива почвы, и для увлажнения воздуха.
Наиболее эффективны струйные и капельные системы полива хотя широко распространены стационарные дождевальные системы с распылителями дефлекторного типа, вода к которым подается через мембранный вентиль с электромагнитным приводом (рисунок 56.1, в). При обесточенном электромагните 2 давление воды в камерах I и II вентиля одинаково и мембрана 1 прижата к седлу усилием, пропорциональным площади всей мембраны. При подаче питающего напряжения на электромагнит вода из надмембранной полости 1 сбрасывается в выходной патрубок III через трубку 3 и мембрана поднимается давлением воды во входном патрубке II. Путь воде в систему полива открыт. Преимущество конструкции мембранного вентиля – отсутствие сальникового уплотнителя штока, имеющего низкую эксплуатационную надёжность.
В связи с ограниченной мощностью источника водоснабжения одновременный полив всех теплиц блока невозможен и автомат полива (рисунок 56.1, б) действует по заданной программе, запускаемой по команде оператора (Н5) от реле времени (К2) или от измерительных преобразователей влажности воздуха (МЕ2) и почвы (МЕЗ). Программа полива, набираемая оператором с помощью переключателя 2, реализуется обегающим устройством 1.
Одновременно с включением насоса поливной воды 4 обегающее устройство 1 начинает вырабатывать команды на поочередное открытие мембранных вентилей 3 на трубопроводах подачи воды к оросителям почвы. Экспозицию полива (увлажнения) также устанавливает оператор.
С технологической точки зрения требуемое количество воды нужно подать в несколько приемов. Заданную кратность полива устанавливают специальным переключателем HS4.
При необходимости программу полива можно прервать, повернув переключатель HS5. С помощью переключателя HS6 можно осуществить полив любого участка теплицы. В этом случае экспозиция полива не ограничена.
Некоторые конструкции автоматов полива несколько отличаются от рассмотренного. Так, при поступлении информации о снижении относительной влажности воздуха в одной из теплиц блока программа полива прерывается и система быстро переключается на увлажнение воздуха в той теплице, из которой поступил сигнал. По окончании цикла увлажнения автомат возвращается к выполнению прерванной программы полива. Команда на повторное увлажнение воздуха в теплице может выполняться как через заданный интервал времени, так и через интервал времени, зависящий от уровня освещенности (чем выше освещенность, тем интервал меньше).
Программа полива (увлажнения) автоматически прерывается при уменьшении расхода воды (импульс от реле протока), аварийном повышении температуры воды и снижении уровня естественной освещенности (обычно до 2 клк).
Главный недостаток всех рассмотренных систем управления поливом – ручное задание норм по-
лива.
В сельском хозяйстве применяют несколько комплектов оборудования для управления В соответствии с агротехническими нормами температура поливной воды должна быть от 22 до 25 ºС. САУ температурой поливной воды работает следующим образом. Датчик температуры поливной воды ТС2 (рисунок 56.2) и задатчик R1 температуры подсоединяют к блоку регулирующего прибора БРП1. При отклонении температуры от заданной на ± 1 °С срабатывают соответствующие пороговые элементы в блоке БРП2 и включается реле KV1 или KV2. При снижении температуры на 1 °С включается реле KV1, которое вызывает срабатывание исполнительного механизма (ИМ), увеличивающего открытие регулирующего клапана КР, а следовательно, и количество горячей воды, поступающей в подогреватель ППВ. При повышении температуры на ГС включается реле KV2, которое подаёт ИМ сигнал на уменьшение количества греющей воды, проходящей через регулирующий клапан. Чтобы исключить перерегулирование при изменении открытия КР, применяют импульсный прерыватель БД1 (генератор импульсов) и реле KV3. На реле KV3 от БД1 через каждые 20 с поступают импульсы установленной при наладке длительности от 1 до 10 с. Изменение пропускаемого количества греющей воды происходит кратковременно только при замкнутом положении контактов реле KV3 и KV1 (или KV2), что исключает перерегулирование температуры из-за инерционности ППВ.
Логометр Р при помощи датчика ТС1 измеряет температуру поливной воды и ограничивает ее максимальное значение в случае возникновения аварийной ситуации. При достижении максимально допустимого значения температуры воды логометр размыкает контакты Р1 и замыкает контакты Р2, что вызывает форсированное закрытие регулирующего клапана КР. Затем при снижении температуры воды до установленного значения контакты логометра возвращаются в исходное положение и вводят в работу систему регулирования температуры воды. Сигнальные лампы показывают следующее: HL1 – температуру воды меньше заданной, HL2 – больше заданной, HL3 – обрыв, HL4 – короткое замыкание в цепи датчиков.
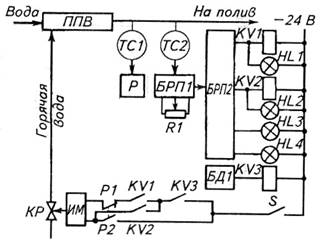
Рисунок 56.2 – Принципиальная схема управления температурой поливной воды
Схема автомата полива приведена на рисунке 56.3. Программу полива 12 теплиц набирают тумблерами SA2...SA24, программу увлажнения – тумблерами SA1...SA23 (на рисунке не показаны). Поскольку системы полива и увлажнения действуют раздельно, а схемы управления ими аналогичны, то здесь рассмотрим только схему автоматического управления поливом.
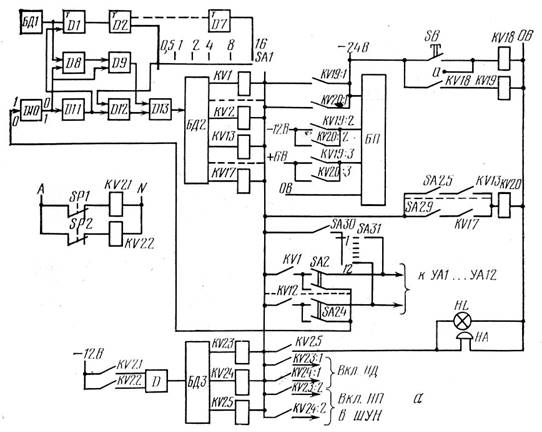
Рисунок 56.3 – Принципиальная электрическая схема автомата УТ-12 полива почвы
Продолжительность полива одной теплицы (2...4 мин) устанавливают переключателем SA1, а кратность полива (1...5) – тумблерами SA25...SA29. При помощи реле KV1...KV12 и тумблеров SA2...SA24 включают соответствующие группы электромагнитных вентилей полива УА1...УА12 через промежуточные реле, расположенные в местных шкафах управления ШУМ. Вентили могут быть включены вручную при помощи тумблера SA30 и переключателя SA31. Последовательность работы элементов схемы показана на рисунке 56.3.
Систему полива включают кнопкой SB или по цепи а через реле KV14 (рисунок 56.3) в заданное время суток. При этом включаются реле KV18 и KV19, последнее своими контактами подает от блока питания БП напряжение в схему автомата, а все триггеры элементов D1...D13 приходят в исходное положение, и срабатывают реле KV1 и KV13. Вслед за этим срабатывает реле KV20 при включенном тумблере SA25 «Кратность полива 1». Контакты реле KV20 включены параллельно контактам реле KV19 и обеспечивают подключение блока БП к автомату при отпускании кнопки SB.
Одновременно с нажатием кнопки SB и подачей напряжения на схему от блока БДЗ срабатывает реле RV23, которое включает основной насос полива НП через промежуточное реле, расположенное в шкафу ШУИ.
Если пуск насоса не произошел, то контакты реле давления воды SP1 остались замкнутыми. В этом случае на элемент D через контакты KV21 поступает сигнал «1», который через 1 мин при помощи блока кольцевого счетчика БДЗ отключает реле KV23 и подключает реле KV24. Реле KV24 подает команду на включение резервного насоса полива НП. Если в течение следующей минуты давление в системе полива не появится, то реле KV24 отключится, а реле KV25 включит ревун НА и сигнальную лампу HL «Авария». Насосы-дозаторы НД используют для подачи растворов минеральных удобрений. С включением насоса НП начинается полив первой теплицы. Через контакты KV1 и включенный переключатель SA2 подаётся сигнал «1» (-24 В) на вход элемента D10, а с выхода элемента D11 сигнал «1» поступает на элементы D1 и D12. На выход элемента D1 подаются также сигналы с периодом 2 с от генератора импульсов БД1. Период этих сигналов увеличивается триггерами, выполненными на элементах D2...D7. В зависимости от положения переключателя SA1 «Время полива» на элемент D12 поступают сигналы «1» с периодом 0,5; 1; 2; 4; 8 или 16 мин, которые затем через элементы D12 и D13 поступают на блок дешифрации БД2 (кольцевой счётчик). Кольцевой счетчик вызывает поочередное срабатывание реле KV1...KV12, которые обеспечивают последовательный полив 12 теплиц (участков) с интервалом, равным выбранному времени полива.
Если полив какого-то участка не предусмотрен, то соответствующий тумблер из SA2...SA24 не включен. В этом случае при срабатывании соответствующего реле из KV1...KV12 на вход элемента D10 «НЕ» поступает сигнал «О», а с его выхода сигнал «1» поступает на входы элементов D8 и D9, реализующих логическую функцию «И». Так как на вход элемента D8 поступают также импульсы с периодом 2 с от блока БД1, то через элемент D9 на вход D13, а затем на дешифратор БД2 сигнал «1» приходит через 2 с. Этот импульс вызывает переключение дешифратора БД2, и время прохода неполиваемого участка сокращается до 2 с.
После срабатывания реле KV12, обеспечивающего полив последнего двенадцатого участка, отключается реле KV13, и включается реле KV14. Это обеспечивает запуск нового цикла полива тех же участков в той же последовательности.
Процесс повторяется до тех пор, пока не реализуется заданная тумблерами SA25...SA29 кратность полива. После этого реле KV20 отключается и снимает напряжение питания со схемы автомата полива. Работа автомата полива прекращается

Автоматическая система управления концентрацией растворов минеральных удобрений, приведённая на рисунке 1, позволяет измерять концентрацию растворов в диапазоне от 0 до 0,2 МПа осмотического давления с точностью до ±10 % и управлять ею. Концентрированный раствор минеральных удобрений готовят в специальном бассейне Б, откуда насосами-дозаторами ИД подают его через регулирующий клапан КР1 в поливную воду.
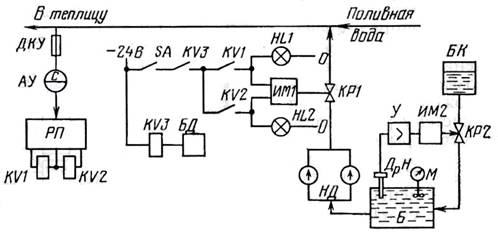
Рисунок 1 – Принципиальная электрическая схема управления концентрацией минеральных удобрений
Концентрацию удобрений в поливной воде измеряют датчиком ДКУ кондуктометрического типа (по электропроводности раствора). Он имеет встроенный терморезистор, предназначенный для компенсации температурой погрешности.
Датчик устанавливают в трубопровод за участком смешения концентрированного раствора и поливной воды. Его присоединяют через анализатор удобрений АУ к регулирующему прибору РП, который настраивают на двухпозиционное управление исполнительным механизмом ИМ1 при помощи реле KV1 «Концентрация больше» и KV2 «Концентрация меньше». Например, если концентрация минеральных удобрений в поливной воде больше заданной, то срабатывает реле KV1, которое включает исполнительный механизм на уменьшение пропуска клапаном КР1 концентрированного раствора. При этом загорается сигнальная лампа НL1. Если концентрация удобрений меньше заданной, то срабатывает реле KV2 и исполнительный механизм открывает регулирующий клапан КР1. При достижении концентрации заданного значения реле KV1 или KV2 отключает исполнительный механизм. Для улучшения качества двухпозиционного регулирования используется импульсный прерыватель, состоящий из реле KV3 и блока БД генератора импульсов с периодом 20 с. Его принцип действия приведен в описании системы регулирования температуры поливной воды.
Одной из основных характеристик растворов минеральных удобрений является показатель рН, который обеспечивает протекание кислотно-щелочной реакции в гидропонной теплице. Теоретически рН может изменяться от 0 до 14. При рН <7 реакцию считают кислой, при рН >7 – щелочной.
Характер реакции питательного раствора оказывает сложное и разностороннее влияние на рост и развитие растений. При этом в разные периоды роста растений требуется различное оптимальное значение рН. При рН <4 рост большинства растений затормаживается из-за снижения усвоения растением катионов минеральных веществ из почвы. При рН >8 также резко снижается рост растений из-за того, что многие минеральные вещества осаждаются на поверхности корней и затрудняют дыхание и питание растений.
Для большинства растений оптимальное значение рН находится в пределе от 5 до 7. В процессе роста растений рН тепличной почвы изменяется, поэтому необходимо управлять значением рН питательного раствора.
Значение рН определяют методами физико-химического анализа. Из экспрессных методов наиболее подходит электрометрический метод измерения рН, принцип действия которого основан на определении потенциалов на электродах, помещенных в исследуемый раствор. Такой электродный датчик измеряет концентрацию водородных ионов (рН) в растворе и выдает сигнал в виде гальванического напряжения. Датчик измеряет рН с точностью до 0,1 рН, а для растений допускаются отклонения до ±0,2рН, а иногда и до ± (0,3...0,5) рН.
Схема управления значением рН раствора минеральных удобрений показана в правой части рисунка 1. При отклонении рН раствора от заданного значения на выходе датчика ДрН изменяется гальваническое напряжение, которое повышается усилителем Ус большим входным сопротивлением. С усилителя сигнал поступает на исполнительный механизм ИМ2, который изменяет степень открытия регулирующего клапана КР2. Это приводит к изменению подачи из бака БК специального раствора, корректирующего значение рН раствора удобрений в бассейне Б. Мешалка с электроприводом М обеспечивает выравнивание концентрации минеральных удобрений и значения рН по всему объему раствора.
Значением рН обязательно надо управлять при выращивании растений в гидропонных теплицах.
Интенсивность фотосинтеза в теплице зависит от концентрации СО2. В ночные часы концентрация его возрастает до 0,05 %, а в дневные падает до 0,01 %. В случае увеличения концентрации СО2 в воздухе теплицы с 0,03 до 0,15 % интенсивность фотосинтеза значительно возрастает, а урожайность повышается на 10...20 %. Очевидно, требуемая по агротехническим нормам концентрация СО2 может быть достигнута только в результате применения специальных систем подкормки, т. е. искусственной подачи СО2 в теплицу.
Содержание диоксида углерода поддерживают на определенном уровне, сжигая природный газ в специальных генераторах или подавая в теплицу дымовые газы из тепличных котельных (реже из специальных газовых баллонов, содержащих СО2).
Схема управления подкормкой СО2 работает по заданной временной программе с 24-часовым циклом.
В оптимальном режиме работы теплицы подача СО2 в расчете на 1 га составляет 50...70 кг/ч
Генератор, вырабатывающий СО2, представляет собой дистанционно управляемую газовую горелку, заканчивающуюся керамическим насадком I (рисунок 2), в каналах которого происходит смешивание газа с воздухом, а на поверхности – сжигание смеси. Для подготовки генератора к работе нажимают на кнопку клапана 4 и разжигают факел запальника 7, пламя которого «лижет» насадок и спай термопары 6. После 20...30 с прогрева вырабатываемой термопарой ЭДС достаточно для удержания клапана 4 в открытом состоянии. Генератор включают в работу, дистанционно открывая клапан 3. В случае погасания факела запальника термопара остывает и клапан 4 закрывается. Все генераторы (их 16 на 1 га) включаются в светлое время суток по команде реле времени или по импульсу от газоанализатора. Схема автоматического управления подкормкой СО2 блокируется при снижении уровня освещённости, а также при открытии форточек из-за повышения температуры или относительной влажности воздуха в теплице.
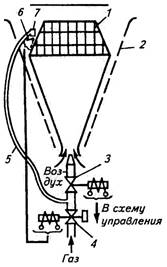
1 – керамический насадок; 2 – защитный экран; 3, 4 – магнитные клапаны; 5 – резиновый шланг; 6 – термопара; 7 – запарник
Рисунок 2 – Схема генератора, вырабатывающего СО2
Продукты сгорания газообразного топлива в котельных содержат 8... 12 % СО2 и тоже могут быть использованы для подкормки растений (рисунок 3). Дымовые газы из котла / дымососом 2 направляются в дымовую трубу 3. Часть этих газов вентилятором 4 перекачивается в теплицу 5, где равномерно распределяется через перфорированный воздуховод. При необходимости допустимая температура газов перед теплицей может быть понижена за счет подмешивания наружного воздуха, подаваемого дополнительно установленным вентилятором 6. В этом случае желательна установка регулятора, стабилизирующего температуру дымовых газов на входе в теплицу.
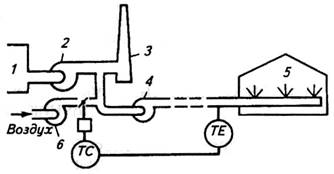
1 – котёл; 2 – дымосос; 3 – дымовая труба; 4, 6 – вентиляторы; 5 – теплица
Рисунок 3 – Функциональная схема автоматизации подкормки растений дымовыми газами из котельной
Подкормка уходящими дымовыми газами котельной экономически оправдана лишь при небольшом расстоянии между котельной и теплицами.
Автоматизация рассмотренных схем подкормки растений диоксидом углерода несложная, но наибольшего эффекта следует ожидать от системы авторегулирования, поддерживающей оптимальное соотношение между облученностью растений и концентрацией СО2 в теплице.
Следует иметь в виду, что оба рассмотренных вида подкормки приводят к увеличению концентрации оксидов азота и других вредных компонентов в воздухе теплицы.
Искусственное облучение в сооружениях защищенного грунта применяют при выращивании рассады и в селекционных целях. Несмотря на увеличение себестоимости рассады, досвечивание эффективно, поскольку увеличивает урожай на 20...30 % и ускоряет его получение на 10...15 дней.
В качестве источников искусственного освещения используют чаще всего ртутные и ксеноновые лампы, спектр излучения которых близок к солнечному (400...700нм). Мощность излучателей в зависимости от зоны расположения теплицы от 100 до 300 Вт/м2.
Системы досвечивания включаются от фотореле или реле времени. При этом суммарная продолжительность светового дня должна быть не более 18 ч. Особенность этих систем управления – строгая последовательность (поочерёдность) включения отдельных групп ламп, позволяющая избежать ударных нагрузок на источник электроснабжения.
Схема управления подкормкой СО2 работает по заданной временной программе с 24-часовым циклом (рисунок 4). На вход 12-позиционного кольцевого счетчика БД2 поступают от блока генератора БД1 импульсы с периодом 2 ч. Эти импульсы поочередно включают реле KV1...KV12, которые управляют промежуточным реле KV15. Реле KV15 управляет газогенераторами СО2 в теплицах через промежуточные реле, размещенные в шкафу ШУМ. После отключения реле KV12, завершающего управление подачей СО2 в последнюю теплицу, срабатывает реле KV13. Контакты реле KV13 подают нулевой потенциал ко всем триггерам блока БД1, возвращающего их в исходное состояние. Затем вновь подключается реле KV1, и начинается новый суточный цикл.
Триггеры можно перевести в исходное состояние, нажав кнопку SB «Установка времени 12 ч». Номера теплиц, в которые необходимо подавать СО2, набирают тумблерами SA39...SA50, а длительность подкормки СО2 устанавливают тумблерами SA1...SA12, причем первый включенный тумблер определяет начало подкормки, последний – окончание. При помощи тумблера SA25 вручную управляют подкормкой СО2 без ограничения во времени.
Управление досвечиванием осуществляется при помощи реле KV16 в рассадных теплицах.
В теплице устанавливают светильники двух типов ОТ-400Е и ОТ-400И с ртутной лампой ДРЛФ мощностью 400 Вт на 220 В. Лампа, подвешенная на высоте 1,5 м, равномерно освещает площадь до 4 м2.
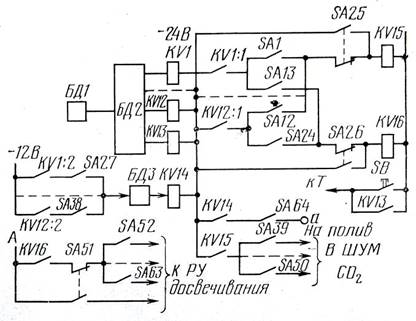
Рисунок 4 – Принципиальная схема управления подкормкой углекислым газом, досвечиванием растений и включением полива в заданное время
Схема автоматического управления досвечиванием работает аналогично схеме управления под-
кормкой СО2.
Контакты реле KV16 подключают фазу А через тумблеры SA52...SA63 «Участок досвечивания» к распределительным щиткам РУ управления досвечиванием.
Длительность досвечивания определяется в часах и равна двойному числу одновременно включенных тумблеров SA13...SA24 «Досвечивание», а начало и конец досвечивания определяются первым и последним из включенных тумблеров. Ручное управление досвечиванием осуществляют тумблерами с распределительных щитков управления РУ.
Реле KV1...KV12 и KV14 совместно с блоком дешифрации ВДЗ и тумблерами SA64; SA27...SA38 осуществляют «Включение полива в заданное время» через реле KV18 (рис. 3). При помощи тумблеров SA27...SA38 (рисунок 4) набирают участки, необходимые для полива. Блок БДЗ обеспечивает выдержку времени во включенном состоянии до 5 с, после которой реле KV14 обесточивается и сигнал «Пуск» с автомата полива снимается.
ТЕМА 2.7 АВТОМАТИЗАЦИЯ ХРАНИЛИЩ
СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ
Активное вентилирование позволяет поддерживать в хранилищах оптимальный температурно-влажностный режим. Одновременно оно обеспечивает удаление с поверхности овощей влаги, а из их массы – продуктов дыхания, ведущих к развитию болезнетворных микроорганизмов.
Воздух в массу хранимого продукта подают при помощи приточных вентиляционных систем, оборудованных центробежными или осевыми вентиляторами. Режим работы вентиляционной системы зависит от температуры наружного воздуха, вида и массы хранимого продукта. Для снижения температуры хранимого продукта наружный воздух нагнетается вентилятором через приточную шахту по вентиляционному каналу в массу продукта. При недопустимо низких и высоких температурах наружного воздуха вентилятор прогоняет через продукт внутренний (рециркуляционный) воздух, а приточная камера в это время закрыта клапаном.
Процессы управления микроклиматом овощехранилищ рассмотрим на примере хранения картофеля. В технологическом процессе хранения картофеля можно выделить три периода: лечебный, охлаждения и хранения.
Лечебный период необходим для быстрого заживления механических повреждений картофеля. С этой целью в межклубневом пространстве насыпи необходимо поддерживать температуру на уровне 14...18°С и высокую относительную влажность воздуха (более 90 %) с минимальным воздухообменом.
При температуре картофеля выше 18 °С должна включаться система активного вентилирования и подавать воздух температурой на 3…4°С ниже температуры массы хранимого продукта. Если в закром хранилища заложен больной картофель (пораженный фитофторой, нематодой и т. п.), то лечебный период проводится при температуре 8…10 °С с последующим охлаждением до 1…2 °С.
При закладке мокрого картофеля его немедленно подсушивают усиленным активным вентилированием при относительной влажности воздуха не более 80 %.
Период охлаждения наступает после двухнедельного лечебного периода, температуру хранимого картофеля постепенно снижают до 2…4°С. Для этого клубни картофеля вентилируют наружным воздухом или смесью его с внутренним воздухом в те периоды суток, когда температура наружного воздуха не менее чем на 4…5 °С ниже температуры насыпи картофеля. Охлаждают клубни медленно: на 0,5…0,6 °С в сутки при максимальной влажности воздуха до 100 %. Период охлаждения длится 20…25 суток.
Период хранения (основной) начинается при температуре картофеля в насыпи 3...4 °С. Вентиляционные установки включаются при температуре в насыпи 4°С и более. Зимой продукт активно вентилируют смесью наружного и внутреннего воздуха, а при сильных морозах – только рециркуляционным воздухом. В остальные времена года насыпь вентилируют наружным воздухом, который забирают в наиболее холодное время суток, или воздухом, охлажденным в специальных холодильных установках.
Во всех случаях относительная влажность воздуха должна быть максимальной, но без образования конденсата на картофеле. При пониженной влажности вентиляционного воздуха возникают большие потери массы клубней, и они теряют свой товарный вид. Аналогичные агротехнические требования предъявляют и к системе автоматического управления микроклиматом других овощехранилищ.
В режимах «Лечение» и «Охлаждение» температура массы хранимой продукции всегда выше заданной, а продолжительность работы системы активного вентилирования зависит от настройки программных реле и температуры наружного воздуха, а также от массы хранимой продукции. При разработке и выборе систем автоматики необходимо знать передаточные функции массы хранимой продукции и верхней зоны в основном режиме «Хранение».
Оборудование обеспечивает технологически обоснованные температурные режимы приточного воздуха, массы хранимой продукции и воздуха верхней зоны без искусственного охлаждения в хранилищах вместимостью до 1000 т с числом вентиляционных камер не более двух.
В оборудование типа ОРТХ входят следующие основные устройства (рисунок 1): смесительный клапан 3 с подогревателем 1 и исполнительным механизмом 4, приточная 2 и вытяжная 5 шахты, два рециркуляционно-отопительных агрегата 6, вентиляционно- распределительный канал 7, вентилятор 8 приточной системы и шкаф автоматического управления системой активного вентилирования (ШАУ-АВ).
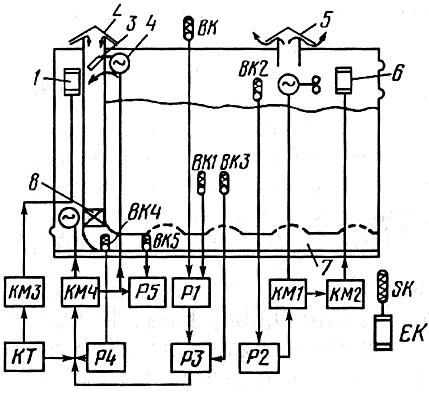
1 – подогреватель; 2, 5 – соответственно приточная и вытяжная шахты; 3 – смесительный клапан; 4 – исполнительный механизм
Рисунок 1 – Технологическая схема автоматического управления температурным режимом в овощехранилище
В шкафу размещены регуляторы температуры Р1...Р5, программное реле времени KТ, ключи и кнопки управления. В связи с неблагоприятными для работы аппаратуры условиями предусмотрен автоматический обогрев шкафа от электроподогревателя ЕK, действием которого управляет контактное термореле SK через промежуточное реле KV1 (рисунок 2). Температуру контролируют датчики ВK…ВK5 (см. рисунок 1) – терморезисторы и термометры сопротивления, а замеряет логометр Р. Система активного вентилирования может работать в режиме ручного дистанционного или автоматического управления.
В ручном режиме переключатели SA1 и SA2 ставят в положение «Р» и кнопками SB1 и SB2 управляют вентиляторами и калориферами двух рециркуляционно-отопительных систем, кнопками SB3 и SB4 – подогревателем смесительного клапана, кнопками SB5 и SB6 – приточной вентиляцией. В этом режиме при помощи регулятора Р4 (типа ПТР-2) автоматически может отключиться только приточный вентилятор, когда температура наружного воздуха снизится до минимально допустимого значения. При допустимой температуре контакт Р4 замкнут.

Рисунок 2 – Принципиальная электрическая схема шкафа ШАУ-АВ
В автоматическом режиме переключатель SA1 переводят в положение «А» Последовательность работы схемы зависит от периода хранения.
В режиме «Лечение» переключатель SA2 ставят в положение «Л», а переключатель SA3 – в положение «Н» (нейтральное), в результате чего действует только приточный вентилятор, который периодически включается и отключается магнитным пускателем KМ4, управляемым контактами KT программного реле времени и регулятора Р4. Программное реле KТ настраивают на шестиразовое включение приточного вентилятора в сутки в каждом случае на 30 мин. Перед этим режимом исполнительный механизм ИМ через контакты KМ4:4 закрывает смесительный клапан полностью, а вентиляция картофеля осуществляется рециркуляционным воздухом.
В режиме «Охлаждение» переключатель SA2 ставят в положение «0» и в работу вводится дифференциальный терморегулятор Р1, который при помощи датчиков ВК и ВK1 сравнивает температуры наружного воздуха и в массе хранимого продукта. Если разница между ними больше так называемого дифференциала (2…3 °С), то срабатывает терморегулятор Р1 и включает промежуточное реле KV2. Контактами KV2:1 реле KV2 вводит в работу терморегулятор РЗ (типа ПТР-2), а затем контактом РЗ вводится в работу регулятор Р4. В результате этого пускатель KМ4 включает приточный вентилятор. Контактами KV2:2 включается пропорциональный терморегулятор Р5, который посредством датчика ВK5 и исполнительного механизма ИМ управляет температурой воздуха в системе вентиляции.
При отклонении этой температуры от заданной терморегулятор Р5 своими замыкающими Р5:2 и размыкающими Р5:1 контактами включает исполнительный механизм, поворачивающий заслонку смесительного клапана в такое положение, при котором устанавливается необходимая температура смешанного наружного и рециркуляционного воздуха. Охлаждение продолжается до тех пор, пока температура в массе хранимого продукта не достигнет заданного значения, после чего посредством датчика ВK3 и контактов Р3 терморегулятора Р3 отключается магнитный пускатель KМ4 приточного вентилятора. Если температура наружного воздуха длительное время превышает температуру в массе продукта, то вентиляция ведется только рециркуляционным воздухом. Сигнал на включение магнитного пускателя KМ4 вентилятора подается от программного реле времени через контакты KТ. В этом случае смесительный клапан закрыт и теплый наружный воздух в хранилище не поступает.
В режиме «Хранение» переключатель SA2 ставят в положение «X». Приточный вентилятор включается контактами KТ программного реле времени 4…6 раз в сутки для снятия перепадов температуры в массе продукта. При этом блок-контактами KМ4:3 магнитного пускателя через переключатели SA1 и SA2 подключаются терморегулятор Р1, реле KV2 и терморегулятор Р3. В дальнейшем схема действует так же, как и в режиме охлаждения. Если температура в течение заданного при помощи реле времени KТ цикла работы не снизилась до нормы, то вентилятор продолжает работать до тех пор, пока не разомкнутся контакты регулятора Р3. При отключении вентилятора смесительный клапан автоматически закрывается при помощи блок-контактов KМ4:4, управляющих работой исполнительного механизма ИМ. В том случае, когда температура в верхней части хранилища над продуктом оказывается меньше заданной, что может вызвать выпадение конденсата в продукт, от датчика ВK2 срабатывает терморегулятор Р2 и через магнитные пускатели KМ1 и KМ2 включает рециркуляционно-отопительные агрегаты.
Рециркуляционно-отопительные агрегаты работают только при выключенном приточном вентиляторе (блок-контакты KМ4:1 замкнуты), отключение их осуществляется контактом Р2 терморегулятора, когда температура верхней зоны равна заданному значению.
Автоматическое управление подогревателем смесительного клапана задают переключателем SA3 (положение «А») при снижении наружной температуры до минус 15 °С. Он включается магнитным пускателем KМ3 или автоматически от реле KT, или вручную кнопками SB3 и SB4 (SA3 в положении «Р»).
Желательно включение в состав оборудования хранилища холодильной машины.
Схема ШАУ-АВ предусматривает возможность управления температурой в ручном и автоматическом режимах. При этом в случае повышения температуры в массе продукта выше нормы в момент, когда наружная температура высока, одновременно с включением приточного вентилятора включается и холодильная машина. Тогда температура воздуха, поступающего в магистральный канал, регулируется терморегулятором, входящим в комплект холодильной машины.
|
|
Видеоматериалы к занятию |
Конструкции фруктохранилищ и овощехранилищ имеют много общего. Автоматизация хранения фруктов вызвана необходимостью охлаждения продукта и точного поддержания температуры и относительной влажности воздуха. Поэтому в системе автоматизации оборудования фруктохранилища предусмотрено управление воздухоохладительными установками, подачей пара для увлажнения воздуха в камерах и концентрацией газа в газовых хранилищах. Технологическая схема фруктохранилища приведена на рисунке 1.
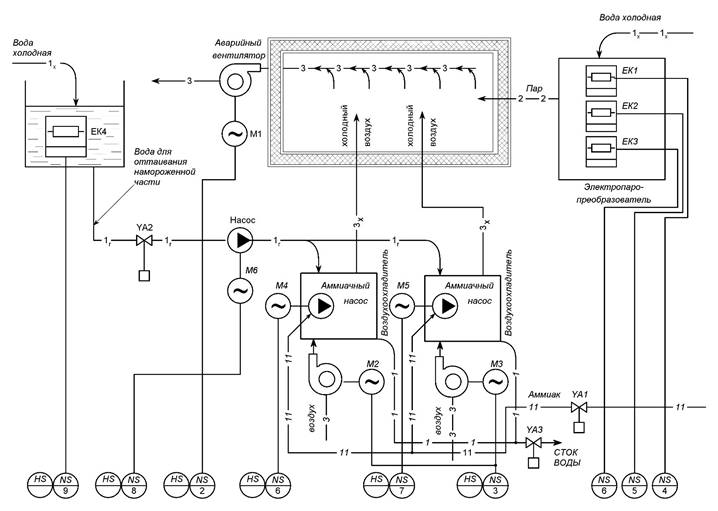
Рисунок 1 Технологическая схема фруктохранилища
В помещениях для хранения фруктов (фруктохранилищах) концентрацию диоксида углерода поддерживают на уровне, существенно более высоком, чем в атмосферном воздухе: 1 % и более. При этом содержание кислорода уменьшается, а азота увеличивается, благодаря чему улучшаются условия хранения фруктов. Содержание СО2 регулируют, пропуская циркуляционный воздух через известковое молоко или сжигая газ при контролируемой подаче воздуха. Полученная таким образом газовая смесь, обогащенная также и азотом, охлаждается и подается в хранилище. Рекомендуемая температура хранения – менее 5 °С, но не ниже температуры подмерзания плодов – должна поддерживаться с высокой точностью. Большое значение имеет также контроль влажности газовой смеси, от которой зависит потеря влаги хранимыми плодами, и контроль содержания газа этилена, выделяемого плодами.
Для фруктохранилищ вместимостью от 1000 до 3000 т разработан комплект электрооборудования, который обеспечивает автоматическое управление микроклиматом в камерах хранения фруктов, управление работой конденсаторного и испарительного оборудования, управления работой и защиту компрессоров холодильных машин от аварийных режимов, сигнализацию о режимах работы оборудования. Один комплект может автоматически управлять двумя-четырьмя камерами.
Автоматическая СУ микроклиматом предназначена для поддержания в камерах заданных значений температуры, влажности воздуха, циклического его перемешивания в камерах, включения и отключения установок приточной и вытяжной вентиляции, аммиачных и водяных насосов, оттаивания воздухоохладителей, а также для контроля за температурой и влажностью воздуха в камерах и температурой в отдельных точках холодильной установки.
Электрическая принципиальная схема СУ микроклиматом во фруктохранилище показана на рисунке 2. Напряжение на схему автоматического управления подают, нажимая на кнопку SB6. В случае экстренной необходимости все агрегаты можно одновременно отключить одной из кнопок SB1…SB5, расположенных в определённых местах фруктохранилища. С помощью кнопок SB7, SB8 управляют аварийным вентилятором M1 (мощностью 1,5 кВт).
Схему СУ температурой и относительной влажностью воздуха первой камеры фруктохранилища включает автомат SF1. Переключателем SA1 выбирают режим работы системы: 0 – отключено управление; 1 – ручной (при накладке); 2 – автоматическая работа.
В автоматическом режиме при повышении температуры в камере срабатывает терморегулятор Р, который включает реле KV1. Реле KV1 своими контактами KV1:1, KV1:2 и KV1:3 включает соответственно электромагнитный аммиачный вентиль УА1, магнитный пускатель KМ3 электроприводов М2 и М3 (мощностью по 2,2 кВт) вентиляторов воздухоохладительных установок и магнитный пускатель KМ6 или KМ7 электропривода одного из аммиачных насосов М4 или М5 (по 5,5 кВт) подачи аммиака как хладоносителя в воздухоохладители камер. Когда температура в камере достигает заданного значения, контакты терморегулятора Р размыкаются и электродвигатели М2…М5 и электромагнитный вентиль УА1 отключаются.
Режим работы аммиачных насосов выбирают, устанавливая переключатель SA3 в одно из положений: 1 – оба насоса отключены; 2 – рабочий насос М4 (М5 в резерве); 3 – ручное управление (при наладке); 4 – рабочий насос М5 (М4 в резерве). При успешном пуске рабочего насоса срабатывает датчик давления SP1, который включает реле KV5. Реле KV5 одним контактом подаёт напряжение на включение компрессоров холодильной установки (на схеме не показаны), а вторым – отключает реле выдержки времени KТ2, предназначенное для включения резервного насоса. Если пуска рабочего насоса не произошло или отсутствует давление аммиака в системе рабочего насоса, датчик SP1 размыкает цепь реле KV5, которое включает реле KТ2. Последнее своим контактом KТ2 через 10 с включает реле KV4, которое подключает резервный насос.
Относительную влажность воздуха в камере фруктохранилища регулируют с помощью влагорегулятора В. При понижении влажности воздуха контакты В включают реле KV3, которое при помощи магнитного пускателя KМ5 дополнительно подключает к электроподогревателю воды ЕK1 секции ЕK2 и ЕK3 электропарообразователя. Пар в камеру подается для повышения влажности воздуха включением соответствующей задвижки, установленной на паропроводе. Когда влажность воздуха в камере достигает нормы, подача пара прекращается. Подогреватель ЕK1 (0,5 кВт) включен постоянно для предотвращения замерзания воды при низких внешних температурах. В схеме предусмотрена защита парообразователя от «сухого хода» при помощи регулятора уровня воды PL. Если уровень воды в увлажнителе понизится, то регулятор уровня разомкнет контакты PL и отключит нагреватели ЕK1…ЕK3.
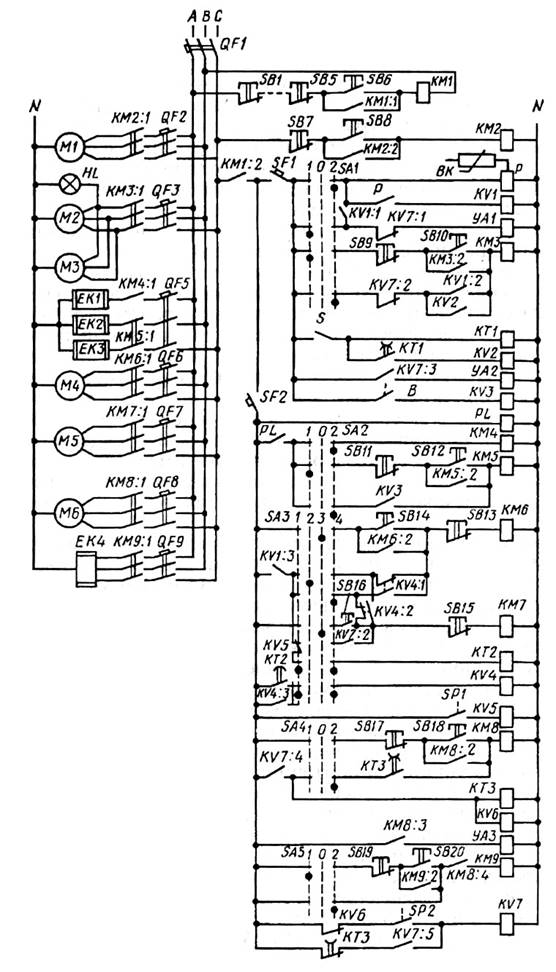
Рисунок 2 – Принципиальная электрическая схема управления микроклиматом фруктохранилища Для создания более равномерного распределения температурно-влажностного поля воздуха внутри камер предусмотрено циклическое перемешивание воздуха при помощи вентиляторов воздухоохладителей. Цепь управления вентилятором первой камеры включают тумблером S. Режим управления работой вентилятора (длительность и время включения и отключения) настраивают при помощи программного реле KТ1, которое через реле KV2 и магнитный пускатель KМ3 управляет работой электродвигателей М2 и М3 вентиляторов.
Системой автоматики предусмотрено управление процессом удаления льда («снеговой шубы»), который постепенно накапливается на поверхности воздухоохладителей. Режим системы удаления льда выбирают переключателями SA4 и SA5, устанавливая их в положения: 1 – наладка; 0 – отключено; 2 – автоматическая работа. Наличие «снеговой шубы» на внешней поверхности воздухоохладителя обнаруживает реле давления SP2, которое воспринимает разность давлений до воздухоохладителя и после него. При увеличении этой разности из-за закрытия воздухопроводов «снеговой шубой» замыкаются контакты SP2, включается и самостоятельно блокируется реле KV7. Контактами KV7:2 реле KV7 отключает магнитный пускатель KМ3 вентиляторов воздухоохладителей, контактами KV7:1 – аммиачный электромагнитный вентиль УА1 и одновременно контактами KV7:3 включает электромагнитный вентиль УА2 воды для оттаивания льда, а контактами KV7:4 – реле выдержки времени KТ3 и реле KV6. Реле KV6 отключает реле KV7. Через период времени (выдержка), равный 3 мин и достаточный для стока аммиака из воздухоохладителя, контактом KТ3 включается магнитный пускатель KМ8, который своими контактами открывает электромагнитный вентиль воды УА3, включает посредством магнитного пускателя KМ8 электропривод М6 (4 кВт) насоса воды для оттаивания и посредством магнитного пускателя KМ9 – электронагреватель ЕK4 (15 кВт) воды для оттаивания. Через 27 мин контактом KТ3 выключаются электропривод Мб насоса воды для оттаивания и электронагреватель ЕK4 и под действием пружины закрывается электромагнитный вентиль УА3 стока воды. Процесс оттаивания прекращается, и через 3 мин контактами KТ3 выключается реле KV7. Выдержка в течение этих 3 мин обеспечивает сток воды с воздухоохладителя и предотвращает включение электромагнитного аммиачного вентиля и воздухоохладителя сразу же после окончания оттаивания. Реле KV7 отключает магнитным пускателем KМ8 электродвигатель М6 насоса, электромагнитные вентили УА2, УА3 и нагреватель ЕK4 воды для оттаивания. Это же реле KV7 размыкающими контактами KV7.1 и KV7:2 вновь вводит в автоматическую работу аммиачный вентиль УА1 и магнитный пускатель KK3 электроприводов М2 и М3 вентиляторов воздухоохладителя.
Кроме устройств управления микроклиматом в камерах в рассмотренный комплект входят автоматические системы регулирования и контроля уровня и температуры аммиака, системы управления компрессорно-конденсаторной группой, вентиляцией, воздушной завесой, включаемой при открытии камер, и рассольными насосами, а также приборы контроля, сигнализации и защиты электрооборудования.
Автоматическая система управления концентрацией растворов минеральных удобрений, Контроль и учёт позволяют своевременно выявить и устранить все недостатки производства и этим способствовать повышению качества и увеличению количества сельскохозяйственной продукции.
Поступающую в хранилище и отпускаемую из него продукцию обязательно учитывают и регистрируют в специальной ведомости или передают данные в память ЭВМ. Продукцию взвешивают на железнодорожных или автомобильных весах, устанавливаемых непосредственно при въезде на территорию хранилища.
Качество хранения сельскохозяйственной продукции контролируют визуально на местах или по отобранным образцам – химическими методами в лабораториях хозяйств и районных центральных лабораториях. Результаты анализов фиксируют в специальных журналах и сообщают руководителям и агротехническим службам колхозов и совхозов.
При помощи технических средств автоматики контролируют микроклимат в хранилищах, температуру и влажность хранимого продукта, очищают его и сортируют перед закладкой на хранение и перед поступлением к потребителю или на посев.
В современных зернохранилищах колхозов и совхозов семенное Зерно хранят в мешках или в закромах вместимостью от 100 до 5000 т, а фуражное – россыпью в железобетонных силосах или металлических бункерах вместимостью от 500 до 10 000 т.
Такие крупные зернохранилища, как государственные зерновые элеваторы, имеют электромеханизированные установки загрузки и разгрузки зерна, активного вентилирования и аэрации семян.
Зерно и зернопродукты на хранение закладывают предварительно очищенными, просушенными и охлажденными до 10 °С и ниже до температур, при которых все жизненные функции живых компонентов зерновой массы затормаживаются. Для успешного хранения зерна в складах необходимо периодически контролировать влажность и температуру зерновой массы.
Влажность контролируют в лабораторных условиях путем проверки проб семян, взятых из отдельных мест хранилища, а температуру – по показаниям датчиков температуры, заложенных в отдельные места хранимой зерновой массы.
Для семенного зерна нельзя допускать, снижение температуры до – 20° и ниже, так как из-за наличия свободной влаги и ее замерзания нарушается целость семени и снижается всхожесть.
По показаниям датчиков температуры обнаруживают очаги самосогревания зерновой продукции и гнили в овощехранилищах.
Самосогревание влажной зерновой массы возникает вследствие протекающих в ней биохимических процессов и плохой теплопроводности. При этом температура в самосогреваемом участке насыпи поднимается до 55...65°, а иногда до 70...75 °С, что ведет к потере посевных, технологических, пищевых и фуражных качеств зерновых продуктов.
Самосогревание возникает в невентилируемых местах, в которых находится зерно с повышенной влажностью, особенно свежеубранное, с большой физиологической активностью.
Процесс самосогревания зерновых продуктов и гниения картофеля и овощей сопровождается не только повышением температуры, но и увеличением выделения влаги. Вследствие этого очаги самосогревания и гниения можно обнаруживать не только датчиками температуры, но и по увеличению показаний датчиков относительной влажности воздуха, закладываемых в массу хранимой продукции.
Выше были рассмотрены схемы автоматизации первичной обработки, учета и хранения сельскохозяйственной продукции, а также поточных линий послеуборочной обработки зерновых культур.
Весьма важной операцией при закладке на хранение картофеля является сортировка его по размерам, отделение комков земли, камней, клубней, пораженных гнилью и фитозеленью, а перед посадкой – отделение загнивших клубней. Необходимость сортировки посадочного картофеля вызвана тем, что в процессе хранения до 15...20% клубней семенного картофеля поражаются различными гнилями, основную часть из которых составляет сухая гниль. Затраты ручного труда на отделение загнивших клубней перед посадкой составляют 20...30% общих трудозатрат на производство картофеля, а посадка несортированного картофеля приводит к недобору 15...20% урожая.
Для сортировки картофеля разработаны оптические, радиоизотопные и температурные методы обнаружения загнивших клубней и клубней, пораженных фитозеленью, а также комков почвы и камней. Рассмотрим принцип работы оптической установки для автоматической сортировки клубней картофеля (рисунок 1), использующей спектральную характеристику коэффициентов отражения клубней. Спектральные характеристики коэффициентов отражения здоровых и больных клубней, как и комков почвы и камней, имеют большие различия на определённых длинах волн λ. Из бункера-питателя 3 клубни картофеля 4 поступают. на; роликовый транспортёр, который поштучно выстраивает и, вращая, перемещает их в зону оптического осмотра.
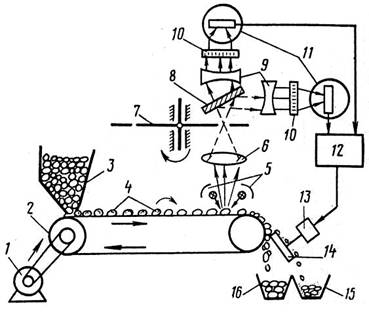
1 – электропривод; 2 – транспортёр-выстраиватель; 3 – бункер-питатель; 4 – клубни картофеля; 5 – оптические излучатели;
6 – объектив; 7 – анализатор изображения; 8 – делитель излучения; 9 – конденсаторы; 10 – оптические фильтры; 11 – фотоприемники; 12 – блок обработки информации; 13 – исполнительный механизм; 14 – заслонка; 15 и 16 – ёмкости для отходов и здоровых клубней.
Рисунок 1 – Схема установки для автоматической сортировки клубней картофеля
Отражённый от клубня оптический поток инфракрасных излучений 5 проходит через объектив 6 и анализатор изображения 7 на делитель излучения 8. С делителя излучений оптический поток, разделяемый на два канала, поступает через конденсоры 9 и фильтры 10 к фотоприемникам 11. Анализатор изображения позволяет поочередно осматривать (сканировать) поверхность клубня.
От фотоприёмников сигналы, пропорциональные коэффициентам отражения оптического потока от поверхности клубня на двух длинах волн (0,95 мкм и 1,25 мкм), поступают на электронный, блок обработки 12. Электронный блок вычитает эти сигналы. В результате на выходе блока 12 появляется сигнал, который передается на исполнительный механизм 13 только от повреждённого клубня или комков почвы и камней. В этом случае электромеханический исполнительный механизм 13 поворачивает заслонку 14 и направляет гнилой клубень или инородные тела в емкость 15 для отходов.
При осмотре здорового клубня разность сигналов от обоих фотоэлементов положительная, исполнительный элемент 13 не срабатывает, а клубень свободно падает в емкость 16. Время передачи клубня из зоны осмотра в ёмкости согласуется со временем прохождения сигнала и срабатывания механизма 13 так, чтобы последний отбрасывал поврежденный клубень при прохождении его мимо заслонки 14. Производительность современной установки – до 6 штук клубней в секунду, или около 2 т/ч, погрешность работы 5...10% в зависимости от загрязненности поверхности, а на мокрых клубнях доходит до 30%.
Плоды томатов сортируют по размерам и зрелости, а также отделяют плоды, пораженные болезнями. По размеру плоды томатов сортируют на механических калибровочных машинах. При разделении по зрелости и отделении больных плодов замеряют упругость и жесткость кожицы плодов или их оптические отражательные свойства.
На рисунке 2, а показан принцип разделения плодов томатов на 3 фракции по зрелости, а точнее, по окраске их поверхности. Плод 1 в свободном падении пролетает через центр фотометрической камеры 3, где он облучается осветителями 2 видимого излучения. Отраженные от плода излучения, многократно преломляясь на внутренней, окрашенной в белый цвет поверхности камеры, попадают на светочувствительные фотоэлементы 4.
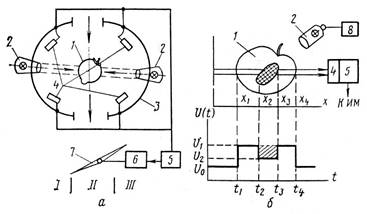
1 – плод; 2 – осветители; 3 – фотометрическая камера; 4 – фотоэлементы; 5 – усилительно-преобразовательное устройство;
Рисунок 2 – Схемы автоматической сортировки плодов томатов (а) и яблок (б) по оптическим
спектральным характеристикам
При отсутствии плода потоки видимого излучения от источников освещения, направленные навстречу друг другу, создают незначительную освещенность в камере.
При пересечении плодом светового потока фотоэлементы 4 воспринимают отраженный поток определенного спектра, зависящего от зрелости (цвета) плода 1. Сигнал с фотоэлементов суммируется и подаётся на усилительно-преобразовательное устройство 5, которое при помощи исполнительного механизма 6 с заслонкой 7 разделяет плоды на три фракции – I, II и III (зелёные, бурые и красные).
Для сортировки плодов яблок, имеющих поврежденную поверхность от механических ударов или пятна на кожуре от болезней, используются сканирующие устройства (рисунок 2, б). В сканирующей системе видимое излучение от осветителя 2, управляемого при помощи электропривода 3, поэлементно освещает поверхность, плода. Отражённый луч воспринимается фотоэлементом 4 и направляется в усилительно-преобразовательное устройство 5. Значение выходного сигнала V(t) фотоэлемента зависит от состояния поверхности и изменяется во времени по форме, показанной на нижней части рисунка 2, б.
С выхода устройства 5 к исполнительному механизму ИМ сортирующей установки поступает сигнал, пропорциональный площади повреждения.
Эту же сортирующую установку можно использовать для разделения овощей и плодов по размеру, перенастроив усилительно-преобразовательное устройство на вычисление суммы, пропорциональной площади медианного сечения объекта.
В МИИСПе разработаны метод и схема сортировки листьев табака по цвету на три товарных сорта. В нашей стране производится более 300 тыс. тонн листьев табака. На производство одной тонны табачного сырья затрачивается 300 дней, из них половина – на сушку, обработку и сортировку.
Ручная сортировка листьев табака малопроизводительна и часто, необъективна, что приводит к значительному снижению качества табачного сырья.
Для автоматической сортировки листьев табака на три товарных сорта предложено использовать отражательные свойства листьев табака и их цветовые характеристики в так называемой стандартной калориметрической системе RGB (первые буквы английских слов красный, зеленый и голубой). Последний показатель тесно связан с характеристикой сортности листьев: к первому сорту относят жёлтые листья с содержанием темной зелени до 20 % площади листа, ко второму – с содержанием тёмной зелени до 50% и к третьему сорту – свыше 50%- Закупочная цепа первого сорта в 4...5 раз выше цены низшего сорта табака.
Сортирующее устройство определяет процент темной зелени на площади листа табака, а в зависимости от этого процента листья разделяют па три сорта.
Принцип действия сортирующего устройства рассмотрим по рисунку 3. Листья табака 4 поступают на транспортёр 2 из подающего устройства 3. Транспортёр при помощи электропривода 1 переносит лист в зону сканирования. Оптический поток излучателя 5, отражаясь от листа, проходит через объектив 6, отверстие сканирующего диска 7 и конденсор 8 на светорасщепляющую оптику 9 с дихроическими зеркалами. В оптике 9 поток отражённого излучения разделяется на два канала, в которых при помощи фильтров 10 выделяются участки спектров G и R. Оптические сигналы, пропорциональные значениям G и R, воспринимаются фотоэлементами 11 и передаются в форме напряжений UR и UG на электронный блок анализа 12. В электронном блоке напряжения UR и UG сравниваются с опорными напряжениями Uоп, определяющими границу разделения между цветовыми характеристиками R и G. Вычислительное устройство 19 совместно с логическими элементами «И» 17 и 18 определяет значение темно-зелёной площади.
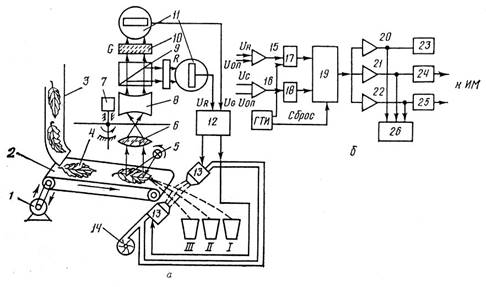
7 – сканирующий диск с электроприводом; 8 – конденсатор; 9 – светорасщепляющая оптика о дихроическими зеркалами;
10 – корректирующие фильтры; 11 – фотоэлементы; 12 – электронный блок анализа; 13 – пневматические исполнительные механизмы; 14 – компрессор; 15, 16 – усилители-компараторы; 17, 18 – логические элементы «И»; 19 – вычислительное устройство; 20, 21, 22 – компараторы; 23, 24, 25 – реле исполнительных механизмов; 26 – блок индикации; I, II, III – ёмкости для приёма листьев табака соответствующего сорта; ГТИ – генератор тактовых импульсов.
Рисунок 3 – Схемы распознающего устройства (а) и электронного блока (б) автоматической сортировки
листьев табака на три товарных сорта
Генератор тактовых импульсов (ГТИ) включает в работу логические элементы только при попадании листа табака в поле объектива и сбрасывает результаты вычисления при уходе листа табака из поля объектива.
Выходной сигнал с вычислительного устройства поступает на компараторы (сравнивающие устройства) 20, 21 и 22, которые разделяют его на три канала в соответствии с определенным сортом листа. С выходов компараторов сигналы проходят на индикатор 26, определяющий количество листьев по сортам, и на реле 23, 24 и 25. Листья первого сорта свободно направляются в ёмкость II, а листья второго и третьего сортов при помощи реле 24, 25 и пневматических клапанов 13 – в ёмкости I и III.
Питание пневмоклапанов осуществляется от воздушного компрессора 14.
У опытного образца устройства погрешность сортирования 4,5 %, производительность – до 10 листьев в секунду, или 65 кг/ч. Аналогичное устройство используют для сортирования рассады на заданное количество групп в зависимости от суммарной площади листьев.

ЭНЕРГОСНАБЖЕНИЯ
Отопительные установки предназначены для нагрева воздуха в системах приточной вентиляции и отопления сельскохозяйственных помещений. Их используют также для сушки зерна, трав, вентиляции и отопления овощехранилищ и теплиц. Применяются установки, работающие на жидком топливе (теплогенераторы), на горячей воде (водяные калориферы), и электрические калориферы. Автоматические отопительные установки обеспечивают стабилизацию температуры нагретого воздуха путем изменения количества подаваемого в теплообменник теплоносителя, топлива или изменения тепловой мощности электронагревателей, а также при помощи заслонки-шибера или жалюзи изменением количества нагреваемого воздуха.
Для отопления животноводческих и птицеводческих помещений применяют теплогенераторы типа ТГ-75, ТГ-150, ТГ-2,5, ТГ-500, работающие на жидком топливе. Теплогенераторы оборудованы системой автоматического регулирования рабочего процесса и защиты. В автоматическом режиме система управления теплогенератором обеспечивает его пуск, если температура воздуха в отапливаемом помещении ниже заданной, и остановку при нагреве воздуха до заданной температуры; защиту теплогенератора при погасании факела во время работы, при перегреве теплогенератора выше допустимой температуры, при отказе системы зажигания; защиту электродвигателей вентилятора и форсунки от перегрузок и коротких замыканий, сигнализацию нормальной работы теплогенератора и аварийных отключений.
Режим работы отопительной установки зависит от характеристик потребителя теплоты. Система отопления производственных помещений, представляющая управляемый объект, состоит из двух элементов: отопительной установки и производственного помещения. Управляемая величина объекта – температура воздуха в помещении, а входная – количество подаваемого топлива в единицу времени. На управляемый объект действует изменение температуры наружного воздуха, изменение количества нагреваемого воздуха, изменение тепловыделения животных или птицы, изменение теплоты сгорания и давления топлива и другие возмущения. Промежуточной переменной объекта является выходная величина теплогенератора – входная величина помещения, то есть количество теплоты, подаваемое в единицу времени в помещение.
Функциональная схема системы автоматического контроля и управления теплогенератором показана на рисунке 1. Преобразователь температуры 1 установлен в производственном помещении. Его сигнал поступает на управляющее устройство 2, которое совместно с программным устройством 3 управляет исполнительными механизмами 4, 5, 6, осуществляющими пуск теплогенератора по заданной программе. Магнитный пускатель 4 включает электродвигатель вентилятора и топливного насоса форсунки. После продувки камеры сгорания исполнительный механизм (электромагнитный клапан) 5 открывает подачу топлива в форсунку и одновременно включается система зажигания топлива. Факел в камере сгорания контролируется преобразователем 7. После прогрева камеры до заданной температуры, которая контролируется датчиком 8, магнитный пускатель 6 включает электродвигатель главного вентилятора, чем заканчивается пуск теплогенератора. Для контроля давления топлива по месту устанавливают показывающий прибор, (манометр). Температуру нагретого воздуха контролирует преобразователь температуры 9, установленный на выходе теплогенератора. Для измерения температуры предназначен вторичный прибор 10. Он имеет контактное устройство, которое защищает теплогенератор от перегрева. Для защиты теплогенератора от погасания факела во время работы предусмотрена его остановка или повторная подача зажигания при случайном погасании факела в нормальном режиме работы теплогенератора. О нормальной работе и аварийных отключениях теплогенератора судят по сигнальным лампочкам и звуковой сигнализации.
Для контроля температуры в помещении устанавливают первичный преобразователь регулятора температуры DIGITOP ТР-1 или другой преобразователь температуры, например камерный биметаллический преобразователь температуры типа ДТКБ, терморегулятор ТРДЭ и т. п.
Для контроля температуры в теплогенераторе применяются дилатометрические преобразователи – реле типа ТР-200, а для измерения температуры – логометрическая установка. Для контроля факела применяют фотореле с фоторезисторами, вставляемые в отверстие корпуса форсунки.
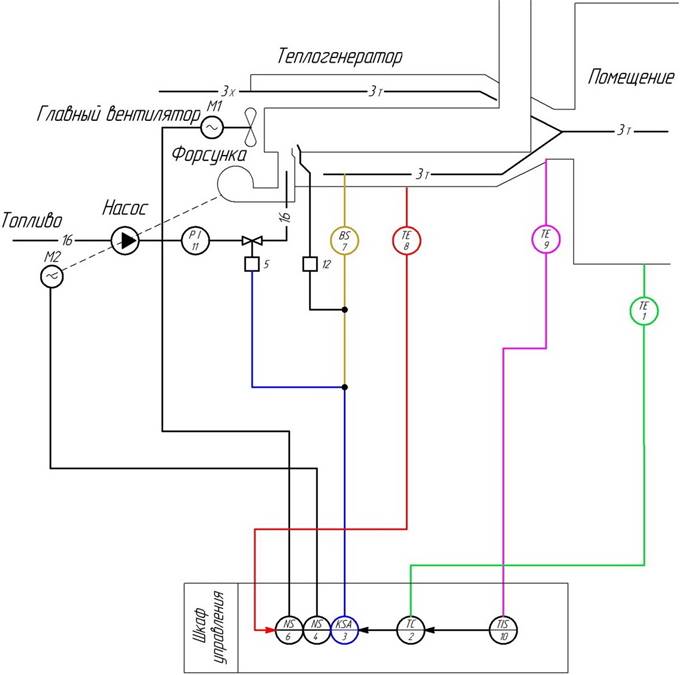
Рисунок 1 – Функциональная схема автоматизации теплогенератора ТГ-2,5А
Приборы автоматического контроля и управления смонтированы в шкафу управления, на передней двери которого установлены переключатель режима («Ручной» или «Автоматический»), кнопки управления, регулятор температуры, измерительный прибор, лампы сигнализации.
Принципиальная электрическая схема управления теплогенератором ТГ-2,5А показана на рисунке 2. Система автоматического управления оборудована двухпозиционным регулятором температуры DIGITOP ТР-1. Работа схемы в автоматическом режиме устанавливается переключателем «Выбор режима». При включении напряжения срабатывает реле KL. Если температура в помещении ниже заданной уставкой регулятора DIGITOP ТР-1, контакты регулятора SK замкнуты и через них подается напряжение на программное реле времени ВЛ-55М1. Через 5 с после включения реле времени замыкаются его контакты KТ:1 и магнитный пускатель KМ2 получает напряжение по цепи KТ:2 – ВK3. Включается двигатель вентилятора форсунки, и начинается продувка камеры горения. По истечении 20…30 с замыкаются контакты KТ:2 и напряжение подается на трансформатор высокого напряжения зажигания ТV1 типа ТГ-1020К и на электромагнитный клапан УА, открывающий доступ горючего через форсунку в камеру горения. Воздушно-топливная смесь загорается и освещает камеру сгорания. Под действием света сопротивление фоторезисторов BL уменьшается, что приводит к срабатыванию реле KL3, а затем и реле KL2, контакты которого отключают трансформатор зажигания и реле времени KТ. После прогрева камеры горения до температуры +38°С размыкаются контакты преобразователя-реле температуры ВK2, отключается реле KL1 и его контакты включают магнитный пускатель KМ1 главною вентилятора. В помещении начинает поступать теплый воздух, подогретый в теплогенераторе.
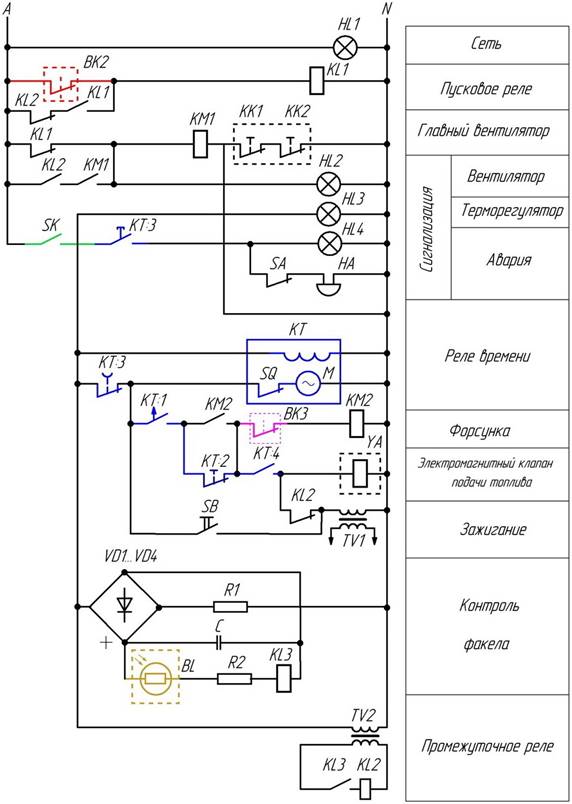
Рисунок 2 – принципиальная электрическая схема управления теплогенератором ТГ-2,5А
Если пуск теплогенератора затянется, то замыкаются контакты KT:3, которые включают сигнальную лампу HL4 «Авария» и звуковой сигнал НА (звонок) и отключают реле времени KT.
При повышении температуры воздуха на выходе теплогенератора выше +90°С преобразовательреле температуры (или измерительный прибор) размыкает контакты ВK3 и отключает магнитный пускатель KМ2. При этом отключается также электромагнитный клапан УА, прекращая подачу топлива в форсунку. Факел погасает, что приводит к отпусканию реле KL3 и KL2. Включается реле времени KТ, и через 15…20 с замыкаются контакты KТ:3, включающие сигнал «Авария».
В случае кратковременного срыва факела при нормальной работе теплогенератора через замкнутый контакт KL2 в цепи трансформатора зажигания ТV1 подается искра зажигания. Если смесь не воспламеняется, то через заданное время замыкаются контакты KТ:3 и система отключается, сигнализируя об аварийном останове лампой HL4. Главный вентилятор работает до тех пор, пока температура в топке не снизится до +38°С и не замкнутся контакты ВK2, за исключением того случая, когда срабатывают реле тепловой защиты электродвигателя главного вентилятора KK1 и KK2.
Если температура в помещении достигает заданной, то размыкаются контакты регулятора температуры SK, и теплогенератор останавливается. При снижении температуры в помещении ниже заданной повторяется пуск теплогенератора.
При аварийной остановке теплогенератора его отключают переключателем «Выбор режима» и после устранения неисправности снова устанавливают этот переключатель в положение «Отопление автоматическое».
Ручное управление теплогенератором осуществляется в соответствии с инструкцией по его эксплуатации.
Принципиальные электрические схемы управления и сигнализации теплогенераторов других типов (ТГ-75, ТГ-150 и др.) отличаются используемыми электрическими аппаратами и приборами, типами измерительных преобразователей, реле, регуляторов и исполнительных механизмов.
Автоматизация систем энергообеспечения имеет большое значение, поскольку без нее невозможно организовать экономичное, надежное и бесперебойное энергоснабжение сельских потребителей. Она является основным средством повышения безопасности труда, КПД и энергосбережения при преобразовании, передаче и использовании энергии.
Теплоснабжение сельского хозяйства осуществляют в основном от котельных и отдельных котлов низкого давления, теплогенераторов и электронагревательных установок. Котлы используют весьма широко, несмотря на их значительную металлоемкость ц повышенную себестоимость тепловой энергии, а также большие потери теплоты при ее передаче от котельных к потребителям. Высокие пожароопасность и загрязненность отходами свойственны таким котлам. На их эксплуатации только в сельском хозяйстве занято более 500 тыс. операторов. Повсеместный переход на теплоснабжение от электроустановок в существенной мере устраняет указанные недостатки, но сдерживается дефицитом и высокой стоимостью электрической энергии, а также малой пропускной способностью сельских распределительных электросетей. Автоматизация котлов и теплогенераторов существенно облегчает труд операторов и частично их сокращает, повышает надежность и оперативность работы оборудования и снижает себестоимость получаемой теплоты, уменьшает на 10% расход топлива. В то же время есть ряд потребителей, получающих теплоту только от электрической энергии, например инкубатории, электросварочные установки, установки локального обогрева молодняка птицы и животных, электрокалориферы и электроплиты.
В сельском хозяйстве используют паровые котлы типа KM, KB, ДКВР, МЗК паропроизводительностью от 200 до 4000 кг/ч, давлением от 01 до 1,3 МПа, температурой от 110 до 190 °С. В котельных тепличных комбинатов установлены пароводяные котлы типа АВ, АПВ, ПТВМ, КВГМ, ДКВР, ДЕ и др. Такие котлы в водогрейном режиме подогревают воду до температуры 70...95 °С для обогрева теплиц, а в паровом режиме вырабатывают пар давлением 0,2 МПа и температурой около 130 °С для пропаривания почвы и собственных нужд. До 20 % добываемого в стране топлива потребляется котельными, производящими 60 % используемой тепловой энергии. Среднее сельскохозяйственное предприятие имеет от 10 до 20 котлов или теплогенераторов и расходует в год от 8 до 10 тыс. т условного топлива. В целом же по стране работает приблизительно 700 тыс. единиц этого оборудования, которое обслуживает более 1,5 млн человек. Естественно, надежная и экономичная эксплуатация оборудования систем теплоснабжения невозможна без его автоматизации, причем экономический эффект от автоматизации возрастает с увеличением мощности котельной.
Рассмотрим основные положения технологии производства тепловой энергии с точки зрения автоматизации управления этим процессом. В сельскохозяйственном производстве используют твердое, жидкое и газообразное топливо. Твёрдое и жидкое топливо состоит из углерода С, водорода Н, кислорода О, азота N, органической серы Sop, колчеданной серы SK, золы А, влаги W. Газообразное топливо (природный газ) на 94 % состоит из метана СН4 и небольшого количества других углеводородов, оксида углерода и водорода.
Основная техническая характеристика топлива – это теплота сгорания QH, характеризующая количество теплоты, выделяющееся при полном сгорании 1 кг или 1 м3 топлива. Теплота сгорания зависит от вида и количества топлива (каменный уголь 12…36 МДж/кг, природный газ 35 МДж/м3). К другим характеристикам относятся влажность, зольность и содержание летучих веществ – газообразных горючих продуктов, выделяющихся при сгорании топлива.
Топочные устройства должны обладать максимально возможной экономичностью, высокой производительностью и надежностью. Топливо в топке может сгорать на колосниковой решётке (слоевые топки) и во взвешенном состоянии в воздушном потоке (камерные топки).
Автоматизация подачи топлива в камеру сгорания котла существенно влияет на производительность процесса получения горячей воды и пара.
Слоевые топки с неподвижным слоем топлива на колосниковой решетке обслуживают вручную. Перемещение топлива по колосниковой решётке частично механизировано. В одной из таких конструкций топливо по колосниковой решетке перемещается планкой 1 (рисунок 1, а), совершающей возвратнопоступательные движения от фронта котла к задней стенке топки, и обратно. При этом на прямом ходе планка перемещает топливо к задней стенке, при обратном подрезает слой шлака, обеспечивая доступ воздуха в топку. Управление такой планкой автоматизировано.
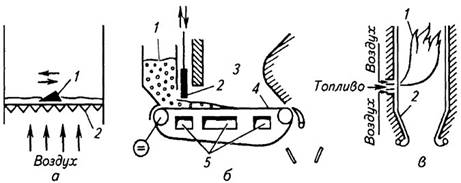
Рисунок 1 – Типы топок:
а – слоевая полумеханическая: 1 – планка; 2 – колосники; б – слоевая механическая: 1 – уголь; 2 – шибер; 3 – топка; 4 – решётка; 5 – воздушные короба; в – камерная: 1 – факел; 2– экран
Слоевые топки, в которых топливо перемещается вместе с решёткой (рисунок 1, б), механизированы полностью. Колосниковое полотно, выполненное в виде бесконечной ленты, перемещается со скоростью от 2 до 30 м/ч. Топливо из загрузочной воронки само ссыпается на движущуюся решётку, причем толщину слоя на ней устанавливают с помощью регулируемого шибера. Специальная форма свода топки способствует быстрому нагреву и воспламенению поступившего топлива.
Более совершенна загрузка топлива с помощью пневмомеханических забрасывателей (рисунок 2, а), использующих энергию вращения ротора (п = 410...760 мин-1) и сжатого воздуха.
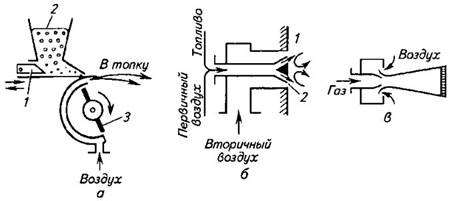
Рисунок 2 – Типы топливоподающих устройств:
а – пневмомеханический забрасыватель: 1 – питатель; 2 –уголь; 3 – роторный метатель; б – пылеугольная горелка: 1 – топка; 2 –форсунка; в – инжекторная горелка
Топливо из бункера извлекается питателем 1, совершающим возвратно-поступательные движения, и распределяется роторным метателем по полотну колосниковой решётки. Транспортирование мелкого угля и угольной пыли осуществляется потоком воздуха. Дальность полёта крупных кусков топлива значительна (4,5 м и более), поэтому решетки в топках с такими забрасывателями перемещаются от задней стенки к фронту. Основная часть воздуха, необходимого для горения, подается под решётку через систему коробов. Оставшаяся часть воздуха подается непосредственно в топку. Управление механической топкой автоматизировано.
Камерные топки (рисунок 1, в) для сжигания твёрдого топлива в воздушном потоке требуют его размола до пылевидного состояния (от 20 до 25 мкм). Несмотря на большой расход энергии на помол (до 30 кВт∙т/ч), такие топки отличаются большой экономичностью, надёжностью и подготовленностью к автоматизации (мощность топки изменяется в зависимости от количества угольной пыли, подаваемой шнековым питателем).
Важнейший элемент камерной топки – горелка (рисунок 2, б), обеспечивающая транспортирование пыли и её перемешивание с воздухом.
Транспортирование жидкого топлива в топку обеспечивается форсункой. Вязкое топливо (мазут) должно быть предварительно подогрето до температуры от 70 до 100 °С. Существуют также форсунки, которые распыляют топливо за счет центробежных сил, образующихся при вращении стакана, внутрь которого подаётся топливо (ротационные форсунки).
Газовое топливо подается в топку через горелку. Инжекторная горелка (рисунок 2, в) сама подсасывает нужное для сжигания газа количество воздуха. В мощных современных газовых и газомазутных горелках воздух подается специальным вентилятором. Производительность горелки регулируется поворотной заслонкой на подводящем газопроводе.
Важная характеристика топки – мощность, которая пропорциональна расходу топлива.
В сельскохозяйственных отопительных и отопительно-производственных котельных применяют котлы двух типов: паровые и водогрейные. Первые из них работают по принципу естественной циркуляции рабочего тела (воды), а вторые – по принципу принудительной циркуляции, создаваемой специальным насосом.
В паровых котлах с естественной циркуляцией для перемещения рабочего тела используют гравитационный напор, возникающий за счёт разности плотностей воды и паровой смеси. Основной элемент котла – барабан 3 (рисунок 3, а), в который насосом 6 подаётся вода.
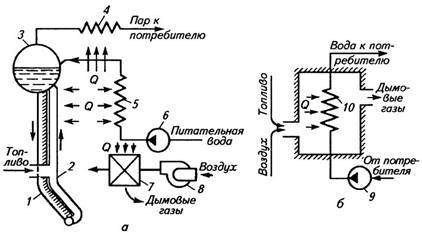
1 – опускные трубы; 2 – подъёмные (экранные) трубы; 3 – барабан; 4 – пароперегреватель;
5 – водяной экономайзер; 6 – питательный насос; 7 – воздухоподогреватель; 8 – дутьевой вентилятор;
9 – сетевой насос; 10 – поверхности нагрева
Рисунок 3 – Принципиальные схемы парового (а) и водогрейного (б) котлов
По необогреваемым опускным трубам 1 вода поступает в коллектор, а оттуда в экранные трубы 2, служащие стенками топочной камеры изнутри и обогреваемые теплотой сгорания топлива Q. Образующаяся в экранных трубах 2 пароводяная смесь вытесняется в барабан 3 водой из опускных труб (естественная циркуляция), где происходит её разделение на пар и воду. Вода снова опускается в коллектор, а пар поступает в пароперегреватель 4 и оттуда к потребителю.
Часть теплоты выходящих из котла газообразных продуктов сгорания (дымовых газов) идет на нагрев воды в экономайзере 5 и воздуха в воздухоподогревателе 7.
На предприятиях сельскохозяйственного теплоснабжения широко применяют двухбарабанные котлы ДЕ (ДКВР), многие из которых не оборудованы паронагревателем и вырабатывают насыщенный пар при давлении 1,4 МПа. Котлы этого типа недостаточно экономичны, что объясняется отсутствием развитых хвостовых поверхностей нагрева, а также неэффективностью ручного регулирования процесса горения в режиме переменных нагрузок. Автоматизация позволяет значительно уменьшить влияние последней составляющей, особенно при работе котла на жидком или газообразном топливе. В общем случае схемы автоматизации котла в значительной степени зависят от вида сжигаемого топлива.
Водогрейные котлы (рисунок 3, б) используют для нагрева воды, циркулирующей в тепловой сети. Наиболее распространены чугунные стационарные котлы, набираемые из отдельных литых секций, соединяемых между собой при помощи ниппелей и стяжек. Котлы этого типа, как правило, работают на твердом топливе, имеют слоевую топку и характеризуются низким уровнем автоматизации.
Технологическая схема производства пара в котле приведена на рисунке 4.
Топливо GT и воздух GB поступают в топку Т котла. Продукты сгорания отдают теплоту воде, циркулирующей по контуру: барабан котла (БК) – опускные трубы (ОТ) – подъёмные трубы (ПТ) – барабан котла. Пароводяная смесь в барабане котла разделяется на пар и воду. Пар GП под давлением рб подается в пароперегреватель ПП, где его температура повышается до tП, а вода из барабана котла вновь опускается в нижний коллектор. Температура перегрева пара регулируется количеством воды GВПР, впрыскиваемой через регулируемый клапан РК в пароохладитель ПО. Необходимый для окисления топлива воздух GB нагнетается в топку котла дутьевым вентилятором ДВ через воздухоподогреватель ВП, в котором его температура повышается за счет теплоты выпускных газов.
Движение выпускных газов GГ создаётся дымососом ДС и регулируется направляющим аппаратом НА таким образом, чтобы в верхней части топки было небольшое разрежение SГ, исключающее «выбивание» выпускных газов в помещение котельной.
Питательная вода GПВ подаётся в барабан котла через регулирующий питательный клапан РПК и водяной экономайзер ВЭ, где её температура также повышается за счет теплоты выпускных газов. Количество подаваемой воды GПВ должно обеспечить стабилизацию уровня воды Hб в барабане котла. В процессе выработки пара солесодержание воды СВ в барабане котла постоянно растёт. Для поддержания этого параметра на допустимом уровне выполняется непрерывный сброс (продувка) части воды GПР из нижней части барабана.
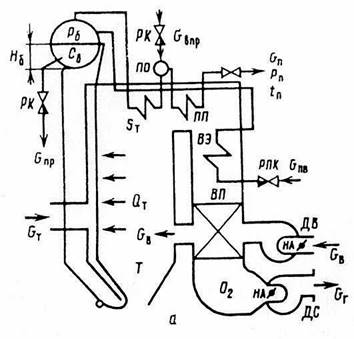
Рисунок 4 – Технологическая схема производства пара в котле
Таким образом, основными регулируемыми параметрами котла являются производительность GП, давление рп, температура tn, причём первый параметр должен изменяться в соответствии с потребностью потребителя, а рп и tn должны быть стабилизированы. Стабильно высокой должна быть и экономичность работы котла, оцениваемая по содержанию О2 в выпускных газах. Вспомогательные регулируемые параметры – уровень воды в барабане Hб, её солесодержание СВ и разрежение в топке ST.
Перечисленные параметры изменяются в результате регулирующих воздействий, а также под действием внешних и внутренних возмущающих воздействий, носящих детерминированный и случайный характер. При этом выходная регулируемая величина одного участка является входной по отношению к другому. Переходные процессы в котле протекают достаточно быстро, и поэтому выполнение технологических процессов с помощью ручного управления невозможно. Водогрейные котлы оборудуют регуляторами процесса сжигания топлива, а паровые котлы – ещё и регулятором питания котла водой.
Процесс управления сжиганием топлива объединяет три взаимосвязанные системы: управления тепловой нагрузкой (т. е. мощностью котла); управления экономичностью процесса сжигания топлива; стабилизации разрежения в топке.
|
|
Видеоматериалы к занятию |
Система автоматики «Кристалл» построена по агрегатному принципу, позволяющему просто и удобно собирать заданную систему управления различными параметрами из небольшого числа элементов аппаратуры. Функциональная схема системы «Кристалл» изображена на рисунке 1. Эта система обеспечивает автоматическое управление давлением пара и уровнем воды в барабане 8 котла, разрежением в топке 6, расходом воздуха и розжигом котла при помощи зажигателя 3, дистанционное управление электроприводами дымососа 14 и насоса 11 питательной воды, дистанционный контроль давления воздуха за вентиляторами, разрежения в топке и температуры выпускных газов. Световая сигнализация включается при повышении или понижении уровня воды в барабане котла, понижении давления воздуха и разрежения в топке, повышении давления пара и при аварийном отключении котла.
Система состоит из регулятора 7 давления пара в барабане 8 котла, регулятора 2 соотношения газа и воздуха, регулятора 13 разрежения в топке, регулятора 9 уровня воды с соответствующими датчиками и контрольно-измерительных приборов 12 температуры. Регуляторы 2, 7 и 13 оптимизируют процесс горения. Давление пара в котле характеризует соответствие между выработкой и потреблением пара. Например, при увеличении потребления пара давление падает, и регулятор 7 выдаёт импульс регулирующему органу 4 на увеличение подачи топлива.
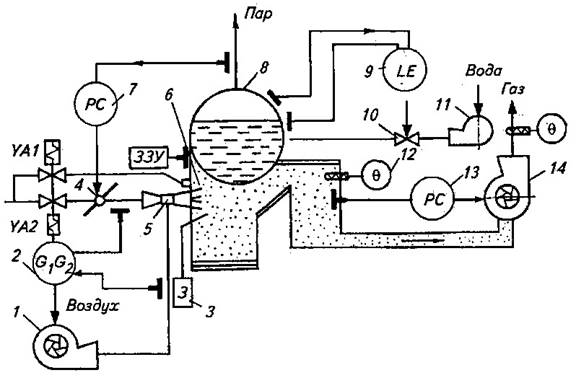
1 – вентилятор; 2, 7, 9, 13 – регуляторы; 3 – зажигатель; 4 – регулирующий орган; 5 – горелка; 6 – топка; 8 – барабан котла; 10 – регулирующий клапан; 11 – насос; 12 – контрольно-измерительные приборы температуры; 14 – дымосос
Рисунок 1 – Функциональная схема системы автоматики «Кристалл»
Для полного сгорания топлива в горелке 5 необходимо определённое количество воздуха, так как избыток воздуха повышает вынос теплоты с выпускными газами, а недостаток воздуха приводит к неполному сгоранию топлива. Следовательно, для обеспечения максимального КПД котельной установки необходим регулятор 2, поддерживающий заданное соотношение топливо – воздух. Регулятор 2 по сигналу от датчиков расхода топлива G1 и воздуха G2 управляет производительностью вентилятора 1.
Для полного удаления выпускных газов используется дымосос 14, который при помощи регулятора 13 обеспечивает заданное разрежение в верхней части топки. При избыточном разрежении увеличивается вынос теплоты через дымосос, при недостаточном – выпускные газы прорываются внутрь помещения котельной.
Уровень воды в барабане котла поддерживается постоянным при помощи регулятора 9, получающего сигнал об изменении уровня от манометра. При отклонении уровня от заданного значения регулятор 9 воздействует на регулирующий клапан 10.
В аварийном режиме котел останавливают, прекращая подачу топлива при помощи клапана УА2, если произошло одно из следующих нарушений: снизилось или повысилось давление в системе подачи топлива или воздуха, резко уменьшилось разрежение в топке, повысилось давление пара, понизился или повысился уровень воды в барабане, погасло пламя в топке. Для этого котел оборудуют соответствующими датчиками безопасности: давления газо- или жидкообразного топлива РЕТ, воздуха РЕВ, разрежения газов в топке РЕГ, давления пара PGП, верхнего LEB, нижнего LEH уровней воды в барабане котла, наличия пламени ЗЗУ (рисунок 2).
Схема управления системой «Кристалл» для котла ЦКВР и устройств его защиты работает в соответствии с временной диаграммой (рисунок 2). При подаче на схему напряжения срабатывает только реле KV5 через замкнутый контакт датчика РЕП, остальные реле сигнализации отключены. Переводя переключатель SA1 в нормальное предпусковое положение Н, включают реле блокировки KB и реле выдержки времени KТ2, которое своими контактами (на рисунке 2 не показаны) исключает ложное срабатывание реле защиты KB1...KV6 из-за срабатывания датчиков вследствие колебаний контролируемых параметров в период подготовки котла к пуску. Затем оператор кнопочными постами включает питательный насос, заполняющий барабан водой, дымосос, дутьевой вентилятор, продувку топливопроводов (на рисунке 2 эти элементы не показаны).
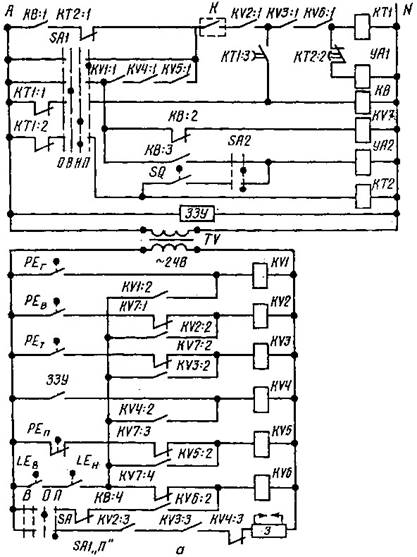
Рисунок 2 – Принципиальная электрическая схема системы «Кристалл»
По мере достижения указанными параметрами заданных значений срабатывают датчики LEB, LEH, РЕГ, РЕВ и включают соответственно реле KV6, KV3 и KV2. Для розжига топки от запальников переключатель SA1 переводят в положение П (Пуск), при котором срабатывают реле выдержки времени КТ1 по цепи К (из схемы управления дымососом) – KV2:1 – KV3:1 – KV6:1, электромагнит УА1 клапана топлива на запальнике и электроискровой зажигатель 3. Одновременно отключаются реле KB и KТ2, но реле KB вновь включается замыкающими контактами KТ1:3.
Далее переключатель SA1 переводят в положение В (Включено) и вручную полностью открывают электромагнит УА2 отсечного клапана (см. рис.1) на топливопроводе. При этом замыкаются контакты SQ (рисунок 2). Одновременно срабатывает реле KТ2, которое с выдержкой времени снимает напряжение с пускового электромагнита УА1, и последний закрывается. На этом пуск заканчивается.
Для нормального останова переводят переключатель в положение О (Отключено). Аварийный останов происходит при срабатывании соответствующих устройств защиты. Например, при снижении давления воздуха за дутьевым вентилятором размыкаются контакты РЕВ датчика давления и реле KV2 отключается. Затем отключаются другие элементы схемы.
Регуляторы в системе «Кристалл» выполнены по функционально-структурной схеме, показанной
на рисунке 3, а.
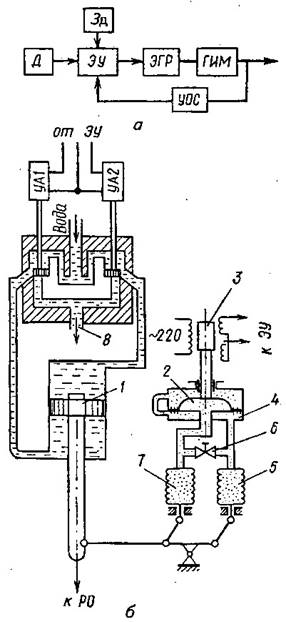
1 – поршень; 2, 4 – полости мембранной коробки; 3 – датчик; 5, 7– сильфоны; 6 – дроссель; 8 – сливное отверстие
Рисунок 3 – Функционально-структурная схема регулятора системы «Кристалл» (а) и схема его гидравлических и
пневматических узлов (б)
Регулятор состоит из датчика Д, задатчика ЗД, электронного усилителя ЭУ, электрогидравлического реле ЭГР, пневматического устройства обратной связи УОС и гидравлического исполнительного механизма ГИМ. Регулятор позволяет управлять параметрами по П-, И-, ПИ-законам регулирования. Усилитель ЭУ воспринимает сигнал разбаланса датчиков и задатчика. Сигнал разбаланса после усиления поступает на электрогидравлическое реле ЭГР, управляющее электрогидравлическим исполнительным механизмов ГИМ.
При отсутствии рассогласования обмотки электромагнитов УА1 и УА2 гидравлического реле (рисунок 3, б) отключены от электронного усилителя. Связанные с их сердечниками клапаны опущены и перекрывают отверстия 8 для слива воды. Поршень 1 неподвижен, так как давление с обеих его сторон одинаковое.
При появлении сигнала рассогласования срабатывает один из электромагнитов ЭГР, например УА1, поднимая клапан. Нижняя полость исполнительного механизма соединяется со сливом 8, и поршень начинает перемещаться вниз под действием давления воды в верхней полости, воздействуя на регулирующие органы (РО). Одновременно перемещаются рычаги обратной связи, сжимая сильфон 5 и растягивая сильфон 7. Вследствие этого давление внутри полости 2 мембранной коробки понижается, а снаружи в полости 4 – повышается, в результате чего сердечник дифференциально-трансформаторного датчика 3 смещается вниз и к усилителю ЭУ поступает сигнал от гибкой обратной связи.
Полости сильфонов 5 и 7 соединены регулируемым дросселем 6. Благодаря этому давления в полостях 2 и 4 постепенно выравниваются, сердечник датчика 3 возвращается в исходное состояние, и интегральная составляющая сигнала исчезает. При открытом дросселе 6 регулятор работает по ПИ-закону, а при закрытом – по П-закону, поскольку в последнем случае появляется жёсткая связь.
Систему автоматики «Курс» используют для автоматизации котлов тепличных комбинатов. Функциональная схема системы показана на рисунке 1. Она обеспечивает автоматический пуск и останов котла, предварительную вентиляцию топки, автоматический розжиг котла, позиционное автоматическое регулирование теплопроизводительности котла, автоматические блокировку и защиту при аварийных режимах, рабочую и аварийную сигнализации. Возникновение ненормальных и аварийных режимов сопровождается звуковой сигнализацией.
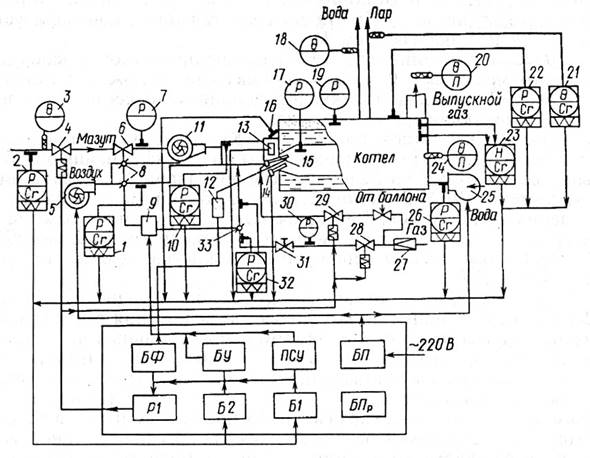
1, 10 – сигнализаторы давления воздуха; 2 – сигнализатор давления мазута; 3 – датчик температуры мазута; 4, 28, 29 – отсечные клапаны; 5, 11 – вентиляторы; 6 – регулирующий клапан жидкого топлива;
7, 17, 19, 30 – приборы контроля давления соответственно мазута, газов в топке, пара и газа для розжига котла; 8 – дроссельные заслонки; 9 – исполнительный механизм; 12 – трансформатор зажигания;
13 – фотодатчик; 14 – ионизационный датчик; 15 – запальник; 16 – конечный выключатель;
18, 20, 24 – датчики температуры соответственно воды выпускных газов и газов в топке; 21 – сигнализатор температуры пара; 22, 26 – сигнализатор давления соответственно пара и воды; 23 – сигнализатор уровня воды; 25 – электронасос; 27 – регулятор давления газа; 31 – вентиль; 32 – сигнализатор давления газа до и после регулирующей заслонки; 33 – регулирующая заслонка
Рисунок 1 – Функциональная схема автоматизации котла типа АВ для тепличного комбината
Применение системы «Курс» обеспечивает полную автоматизацию котла, его надежную и экономичную работу без постоянного дежурного персонала. Система «Курс» работает в комплекте с общепромышленной контрольно-измерительной и регулирующей аппаратурой: сигнализаторами давления воздуха 1 и 10, мазута 2, пара 22, воды 26, газа 32 до и после регулирующей заслонки 33, сигнализатором 23 уровня воды, датчиками температуры мазута 3, воды 18, выпускных газов 20, газов в топке 24, сигнализатором 21 температуры пара, приборами контроля давлений мазута 7, газов в топке 17, пара 19 и газа для розжига 30. Уровень воды в котле поддерживается при помощи электронасоса 25.
Газ подаётся в котел через регулятор 27 давления газа, отсечной клапан 28 и вентиль 31. При розжиге топки газ поступает из газового баллона через отсечной клапан 29 и запальник 15. Воздух в топку подается вентиляторами 5 и 11. Резервное жидкое топливо (мазут) распыляется ротационной форсункой, имеющей общий электропривод с вентилятором 5. На трубопроводе жидкого топлива установлены отсечной 4 и регулирующий 6 клапаны. Газ воспламеняется в запальнике 15 от искры, получаемой на электродах от трансформатора зажигания 12. Наличие пламени в запальнике контролируется ионизационным датчиком 14, а в основной горелке – фотодатчиком 13. Плотность закрытия топки контролируется конечным выключателем 16.
Процессом горения в топке управляют при помощи исполнительного механизма 9, воздействующего на положение газовой заслонки 33, или клапана 6 жидкого топлива и дроссельных заслонок 8, изменяющих расход воздуха.
Управляющее устройство системы «Курс» состоит из отдельных блоков и панелей. Поступающая от датчиков информация обрабатывается в блоках Б1 и Б2 и направляется на панель сигнализации и управления ПСУ, блок управления БУ, блок реле Р1 и блок управления факелом БФ. Переключатели вида топлива, режима и резервного оборудования размещены в блоке переключателей БП. Электроснабжение всех цепей управления осуществляется от блока питания БП.
Котёл пускают, нажимая кнопку «Пуск» на панели системы «Курс» после заполнения котла водой и включения вентилятора, подающего воздух в топку. При этом исполнительный механизм 9 перемещает органы, регулирующие поступление топлива и воздуха, в положение 100%-й нагрузки и начинается вентиляция топки и газоходов котла, которая продолжается 1...2 мин. По истечении этого времени от блока управления БУ поступает сигнал на исполнительный механизм 9, осуществляющий перевод воздушной заслонки и регулирующего органа топлива в положение 20%-й нагрузки. Блок реле Р1 выдаёт сигнал на открытие нормально закрытого отсечного клапана 29 и закрытия продувочного клапана (на рисунке 1 не показан). Одновременно от блока БФ включается трансформатор зажигания 12. При появлении пламени в запальнике 15 от ионизационного датчика 14 поступает в блок Б1 и реле Р1 сигнал на открытие отсечного клапана 28, подводящего газ к горелке. При успешном розжиге горелки сигнал от фотодатчика 13 поступает через блоки Б2 и БУ на исполнительный механизм 9, который через 20...25 с перемещает регулирующие органы в положение 40%-й нагрузки. Запальник 75 отключается через 50...70 с. После этого котел переводят переключателем, установленным на панели системы «Курс», в режим автоматического регулирования параметров котла. На этом пуск котла заканчивается.
Автоматическая система регулирования обеспечивает перемещение регулирующих органов в положения 40- и 100%-й нагрузки и автоматического отключения подачи воздуха и топлива. При максимальных значениях температуры воды или давления пара исполнительный механизм переходит из положения 100%-й нагрузки в положение 40%-й нагрузки, а при достижении максимальных предельно допустимых значений система при помощи отсечного клапана 28 или 4 прекращает подачу топлива. При этом исполнительный механизм занимает положение 20%-й нагрузки, пламя в топке гаснет и начинается послеостановочная вентиляция котла, которая автоматически отключается через 30...60 с. При снижении регулируемого параметра до предельного минимального значения котёл автоматически включается в соответствии с изложенной выше последовательностью пуска.
Работу котла останавливают дистанционно с помощью кнопки «Стоп», расположенной на панели. Последовательность нормального останова аналогична описанному выше автоматическому отключению котла. Аварийное автоматическое отключение котла происходит в следующих ситуациях: при максимальном и минимальном предельных уровнях воды в котле; температуре воды выше 97 °С или давлении пара до 0,21 МПа (котел АПВ-2); давлении газа перед клапанами-отсекателями и перед горелкой ниже 1 кПа, а перед регулирующей заслонкой выше 35 кПа; давлении первичного воздуха ниже 1,1 кПа или вторичного ниже 0,15 кПа. При аварийном отключении повторный пуск котла возможен только после устранения причины останова.
Система «Курс» оснащена устройствами световой сигнализации положения регулирующих органов, контроля всех параметров в нормальном и аварийном режимах, памяти причин аварии и общей звуковой аварийно-предупредительной сигнализации.
Они предназначены для снижения давления или для одновременного снижения давления и температуры пара до уровня, необходимого потребителю. Основа редукционной установки – регулирующий клапан специальной конструкции, способной противостоять разрушающему действию потока пара, движущегося с большой скоростью. В конструкцию редукционно-охладительной установки входит также охладитель впрыскивающего типа.
Схема автоматизации редукционной установки (рисунок 1, а) предусматривает автоматическое поддержание давления редуцированного пара (регулятор, позиция 1), а схема редукционно-охладительной установки (рисунок 1, б) – также и температуры редуцированного пара (регулятор, позиция 2).
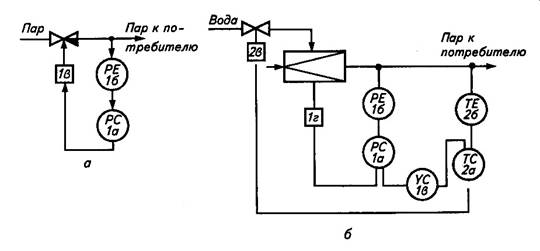
Рисунок 1 – Схемы автоматизации редукционной (а) и редукционно-охладительной (б) установок
Инерционность объекта регулирования минимальна, но для улучшения качества регулирования температуры рационально выполнение динамической связи (позиция 1в) с регулятора давления на регулятор температуры.
Они предназначены для удаления из питательной воды растворенных газов, способствующих коррозии металлических поверхностей нагрева котла и трубопроводов тепловых сетей. Остаточное содержание кислорода в сетевой воде для стальных водогрейных котлов не должно превышать 0,05 мг/кг, а в питательной воде для паровых котлов – 0,03 мг/кг.
Деаэратор представляет собой подогреватель смешивающего типа, в котором одновременно с нагревом питательной воды происходит выделение, а затем удаление растворенных в воде газов. Конструкция установки объединяет деаэрационную головку 1 (рисунок 2, а) и бак-аккумулятор деаэрированной воды 2. Питательный насос 3 перекачивает воду из бака-аккумулятора в барабаны котлов. Количество этой воды для каждого из котлов определяется работой своего регулятора питания.
В деаэрационной головке создаются встречно направленные потоки греющего пара (снизу вверх) и деаэрируемой воды (сверху вниз), в процессе перемешивания которых происходит нагрев воды до температуры кипения, что является необходимым условием эффективности процесса деаэрации.
Наибольшее распространение в паровых котельных получили деаэраторы «атмосферного» типа, давление которых 0,12 МПа, что соответствует температуре насыщения 104 °С. Стабилизация этого параметра обеспечивается работой регулятора давления (позиция 1), действующего обычно по ПИ-закону.
Естественно, в цикле котельных установок неизбежны потери рабочего тела (пара и воды). Эти потери восполняются химически очищенной водой, поступающей на деаэрацию вместе с потоком конденсата.
Косвенный показатель соответствия между необходимыми количествами воды для питания котлов и деаэрированной смеси конденсата и химически очищенной воды – постоянство уровня воды в аккумуляционных баках. Этот параметр поддерживается регулятором уровня (позиция 2) с помощью регулирующего клапана на линии подачи химически очищенной воды ХОВ в деаэрационную головку.
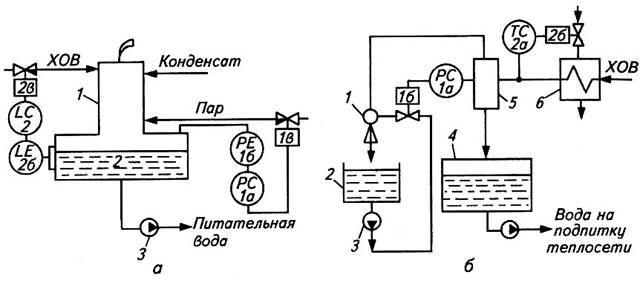 а – атмосферный деаэратор: 1 – головка деаэратора; 2
– бак-аккумулятор; 3 – питательный насос; б – вакуумный
деаэратор: 1 – эжектор; 2 – бак горячей воды; 3 – циркуляционный
насос; 4 – бак-аккумулятор; 5 – корпус деаэратора; 6 – водо-водяной
подогреватель Рисунок 2 – Схемы автоматизации деаэрационных установок:
а – атмосферный деаэратор: 1 – головка деаэратора; 2
– бак-аккумулятор; 3 – питательный насос; б – вакуумный
деаэратор: 1 – эжектор; 2 – бак горячей воды; 3 – циркуляционный
насос; 4 – бак-аккумулятор; 5 – корпус деаэратора; 6 – водо-водяной
подогреватель Рисунок 2 – Схемы автоматизации деаэрационных установок:
Параллельно работающие деаэраторы объединяют по воде и пару. Импульсы к регуляторам давления и пара отбирают из этих уравнительных линий и на всю группу деаэраторов устанавливают один регулятор уровня и один регулятор давления.
В водогрейных котлах, где отсутствует теплоноситель – пар, деаэрация воды осуществляется в деаэраторах вакуумного типа. Основное условие деаэрации – кипение воды – обеспечивается в этом случае понижением абсолютного давления в корпусе деаэратора до 7,5 кПа, что соответствует температуре насыщения 40 °С, или чаще до 30 кПа, при котором вода кипит уже при 70 °С.
Соответствующее принятому режиму деаэрации давление в корпусе деаэратора 5 (рисунок 2, б), поддерживается регулятором давления (позиция 1), управляющим производительностью водоструйного насоса (эжектора), откачивающего паровоздушную смесь из корпуса деаэратора.
Рабочее тело водоструйного насоса – вода, циркулирующая по замкнутому контуру, включающему в себя бак 2 рабочей воды, циркуляционный насос 3 и собственно эжектор 1. Необходимая для вскипания температура деаэрируемой воды обеспечивается ее подогревом в водо-водяном подогревателе 6 под контролем регулятора температуры (позиция 2). Если давление в деаэраторе 7·103 Па, то подогрева ХОВ не требуется, ибо, как указывалось выше, температура деаэрации всего 40 °С. Уровень в бакахаккумуляторах 4 вакуумных деаэраторов поддерживается так же, как и в атмосферных.
Безнакипный режим работы котлов обеспечивается химической обработкой питательной воды.
Исходная вода из источника водоснабжения после подогрева до 30...40 °С в теплообменнике поступает в осветлитель 2 (рисунок 3), где происходит коагуляция (укрупнение) мелкодисперсных примесей. Осветленная вода собирается в баке 3, откуда насосом 4 подается в механический фильтр 5, а затем последовательно в Н- и Na-катионитовые фильтры 6 и 8.
При обработке воды в Н-катионитовых фильтрах катионы Са и Mg заменяются на катионы водорода, а при обработке в Na-катионитовых фильтрах – на катионы натрия, соли которого образуют не плотную пленку накипи, а рыхлый осадок, легко удаляемый при продувке котла.
После Н-катионитовых фильтров вода поступает в декарбонизатор 7 (сосуд, заполненный керамическими кольцами), служащий для удаления выделяющегося при Н-катионировании диоксида углерода.
В качестве катионитового материала применяют минерал глауконит, сульфоуголь (уголь, обработанный серной кислотой) и синтетические смолы.
По мере работы фильтров обменная способность катионитового материала уменьшается и качество обработки воды ухудшается. Поэтому фильтры периодически выводят на регенерацию, в процессе которой катионит в течение 15...20 мин обрабатывают раствором NaCl (Na-катионитовый фильтр) или H2SO4 (Н-катионитовый фильтр), после чего фильтр отмывают теплой чистой водой и вновь вводят в работу.
Механические фильтры отмывают обратным потоком воды.
Регулятор уровня воды в баке осветленной воды (позиция 1) определяет производительность осветлителя, воздействуя на подачу исходной воды. Качество работы этой системы регулирования имеет большое значение, поскольку нормальное течение процесса осветления требует стабилизации нагрузки осветлителя и постоянного уровня взвешенного осадка на его дне.
Для снижения жесткости воды в осветлитель вводят известковое молоко, а для удаления механических примесей – коагулят. Дозировку реагентов осуществляют регулятором (позиция 3) пропорционально количеству подаваемой на обработку воды. Нормальное течение процесса требует постоянства температуры этой воды, что обеспечивается работой регулятора (позиция 2), управляющего клапаном на подаче греющего теплоносителя к подогревателю исходной воды.
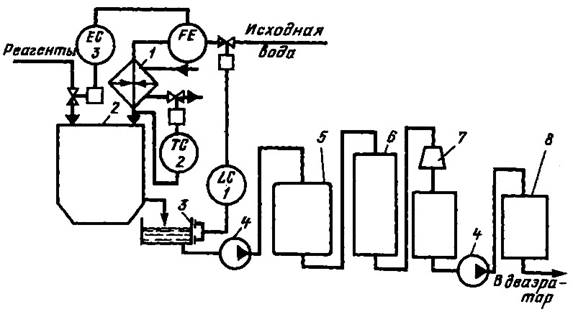
1 – подогреватель исходной воды; 2 – осветлитель; 3 – бак осветленной воды; 4 – насосы;
5 – механический фильтр; 6 – H-катионитовый фильтр; 7– декарбонизатор;
8 – Na-катионитовый фильтр
Рисунок 3 – Функциональная схема автоматизации водоподготовительной установки:
Операции по отмывке механического фильтра и регенерации катионитовых фильтров также могут быть автоматизированы в случае оборудования запорной арматуры дистанционными приводами.
Электрокотельные оснащаются электрокотлами, водонагревателями и другим оборудованием, необходимым для получения пара и горячей воды, и снабжения ими сельскохозяйственных потребителей. Котельные могут быть центральными и местными. Центральные электрокотельные предназначены для комплексного теплоснабжения значительного числа разнородных потребителей, а местные – для снабжения теплотой ограниченного круга потребителей обычно в пределах одного помещения. Местные электрокотельные чаще всего бывают специализированными: отопительными или горячего водоснабжения. Выработанные в электрокотлах горячая вода пли пар подаются к потребителям по трубопроводам (тепловым сетям).
Основные достоинства электрических котлов:
– отсутствие отходящих газов, копоти;
– полнейшая автономность работы;
– простота установки, эксплуатации и настройки;
– минимальный уровень шума;
– высокий КПД (до 99%);
– относительно невысокая стоимость.
Для подсчета потребности в теплоте и выбора котлов строят суточные графики тепловых нагрузок.
В графиках учитывают все потребители, снабжаемые теплотой от электрокотельной.
Наиболее целесообразны сравнительно небольшие по мощности (до 400...600 кВт) электрокотельные, не требующие больших капиталовложений в реконструкцию систем электроснабжения н сооружения дорогостоящих тепловых сетей.
Электрокотельные обязательно оборудуют устройствами аккумулирования теплоты (в виде горячей вод или пара), где она запасается в ночные часы работы электротепловой установки. В дневное время теплоснабжение осуществляется путем отбора теплоты из аккумулирующих емкостей.
На рисунке 1 приведена функциональная схема автоматизации простейшей электрокотельной с двумя водогрейными котлами для теплоснабжения животноводческой фермы на 200...400 голов. Вода, нагреваемая в котлах 8, циркулирует по замкнутой системе: котёл 8 – теплоаккумулирующая емкость 6 – коллектор горячей воды 2 – система отопления – коллектор холодной воды 3 – грязевик 4 – котёл.
Разборную горячую воду получают в скоростном водо-водяном подогревателе 1, где водопроводная вода подогревается горячей водой, подаваемой от коллектора 2.
Система автоматизации выполняет задачи: управление работой котлов по заданной программе, трёхпозиционное регулирование температуры в аккумулирующей емкости, предотвращение возможности включение котлов при не закрытых дверях ограждения.
Программное реле (позиция 1) обеспечивает работу электрокотельной по заданному графику, исключающему возможность включения котлов 8 в работу в часы максимума нагрузки. Температурное реле (позиция 2) даст команду на включение котлов при достижении температуры минимального заданного значения. При повышении температуры в аккумулирующей емкости выше нормы температурное реле (позиция 3) подаёт сигнал аппаратуре на отключение котлов. Для обеспечения безопасности при открытии дверей ограждения датчик положения (позиция 3) подаёт сигнал аппаратуре управления на отключение котлов и включение сигнализации (позиция 8).
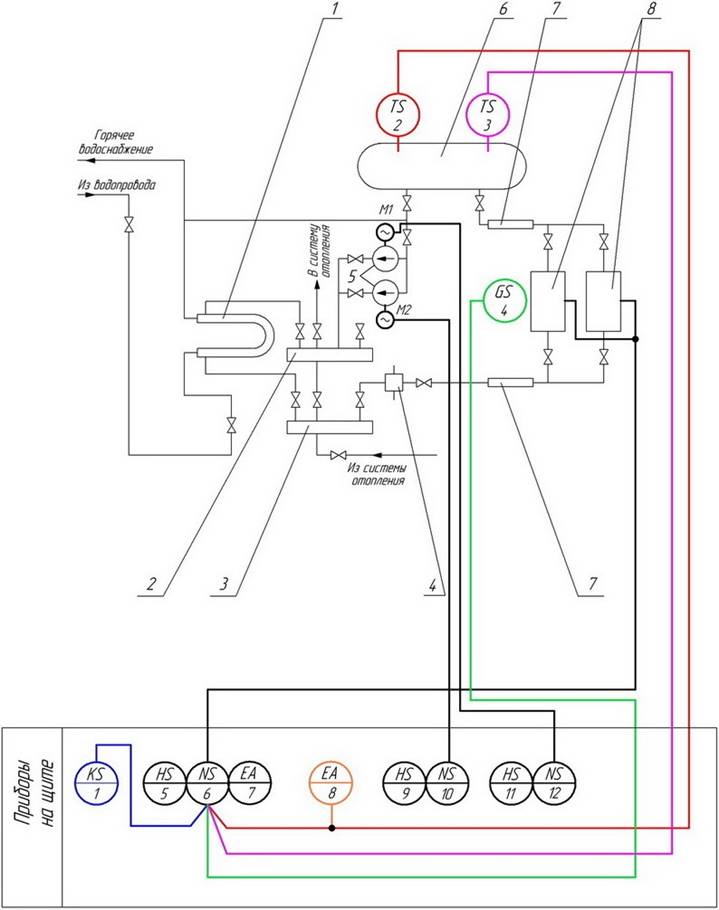
1 – скоростной водонагреватель; 2 – коллектор горячей воды; 3 – коллектор холодной воды;
4 – грязевик; 5 – циркуляционные насосы; 6 – аккумулирующая ёмкость; 7 – изоляционная вставка;
8 – электроводонагреватели (котлы)
Рисунок 1 – Принципиальная теплотехническая схема простейшей электрокотельной
Принципиальная электрическая схема электрокотельной приведена на рисунках 2 и 3.
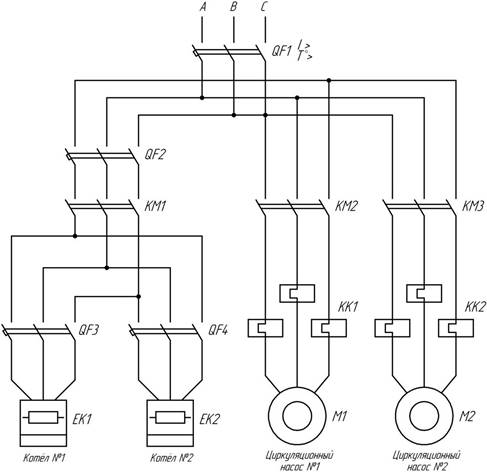
Рисунок 2 – Главная цепь принципиальной электрической схемы электрокотельной
Принципиальная электрическая схема электрокотельной выполняется следующие функции:
– защита сети от аварийных режимов
– управление работой котлов по заданной программе;
– отключение электронагревателей при достижении максимального значения температуры в аккумулирующей емкости и возобновление работы при достижении минимального предела; – отключение электронагревателей при открытых дверях ограждения.
Питание в силовую цепь подается автоматическим выключателем QF1. Циркуляционные насосы (основной и резервный) включаются кнопками SB3.2, SB4.2 и магнитными пускателями KM2 и KM3, а котлы – QF3, QF4 и контактором KМ1. Котлы можно включать только в определённые часы суток, задаваемые программным реле времени KТ, имеющим две программы. Контроль температуры воды в аккумулирующей емкости осуществляет температурное реле SK1. Верхний контакт SK1 замыкается при температуре воды ниже нормы, нижний – при достижении максимального значения. В аварийном режиме, когда температура воды на 3...4°С превысит верхнюю уставку реле SK1, срабатывает реле SK2.
Блокировочный контакт SQ предотвращает возможность включения котлов при незакрытых дверях ограждения. Включение котлов происходит при замкнутом состоянии одного из контактов реле времени KТ. Предварительно (запуском KM2 или KM3) пускают в работу циркуляционный насос, включаются автоматические выключатели QF3, QF4 и QF2. Кнопкой SB1.2 подают питание в катушку реле KL2, которое через промежуточное реле KL3 включает контактор KМ1 цепи питания котлов. При повышении температуры выше минимального значения верхний контакт SK1 размыкается, но питание реле KL3 происходит через собственный контакт KL3.1.
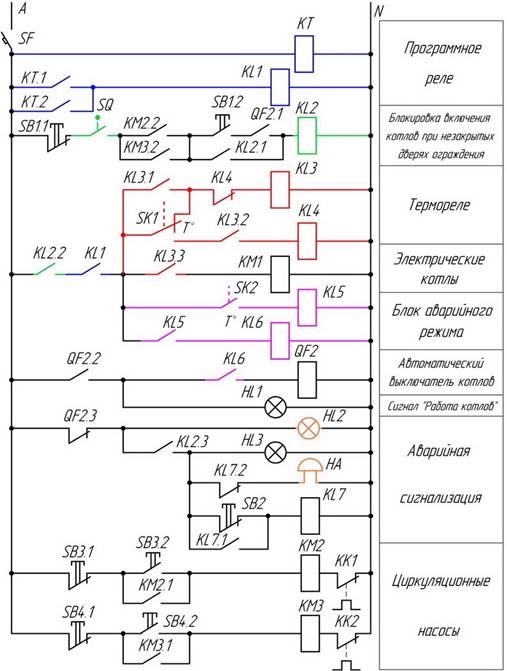
Рисунок 3 – Принципиальная электрическая схема управления электрокотельной
При достижении максимального значения температуры замыкается нижний контакт SK1, получает питание реле KL4, и через контакт KL3.3 промежуточное реле KL3 снимает напряжение с контактора KМ, который отключает котлы. В аварийном режиме, если схема не сработает, замыкается контакт SK2, получает питание реле KL5, своим контактом запитывает реле KL6, которое подаёт напряжение в катушку независимого расцепителя выключателя QF2, отключающего питание котлов. Блок-контакты QF2.3 включают аварийную световую (HL2) и звуковую (НА) сигнализацию. Снимают звуковой сигнал кнопкой SB2.
|
|
Видеоматериалы к занятию |
УРОК №11. АВТОМАТИЗАЦИЯ БЕЗОПАСНОСТИ КОТЕЛЬНЫХ УСТАНОВОК.
Автоматика безопасности, объединяющая технологические устройства защиты и блокировки механизмов котла, обеспечивает заданную последовательность операций при растопке котла и его автоматическое отключение при отклонении технологических параметров от допустимых значений, т. е. в аварийной ситуации.
Устройства защиты действуют тогда, когда возможности автоматического или дистанционного управления по предотвращению аварийных отклонений параметра исчерпаны и технологический процесс должен быть изменен или приостановлен.
Объем аварийных защит определяется требованиями СНиП и зависит от типа котла и вида сжигаемого топлива.
Паровые котлы на твёрдом топливе (слоевое сжигание) отключаются с остановкой тягодутьевых установок и механизмов, подающих топливо в топку:
– при снижении давления воздуха под колосниковой решеткой;
– при повышении давления в топке;
– при повышении или понижении уровня воды в барабане котла.
Паровые котлы на жидком или газообразном топливе отключаются с прекращением подачи газа:
– при повышении или понижении давления газа перед горелками;
– при повышении давления газов в топке;
– при повышении или понижении уровня воды в барабане;
– при понижении давления воздуха перед горелками; – при повышении давления пара; – при погасании факела горелок.
Водогрейные котлы на твердом топливе отключаются с остановкой тягодутьевых установок и механизмов, подающих топливо в топку:
– при повышении температуры воды за котлом;
– при повышении и понижении давления воды за котлом; – при уменьшении расхода воды через котел; – при увеличении давления газов в топке.
Водогрейные котлы на газообразном топливе отключаются с прекращением подачи газа:
– при повышении температуры воды за котлом;
– при повышении или понижении давления воды за котлом;
– при понижении давления воздуха перед горелками;
– при повышении или понижении давления газа перед горелками;
– при повышении давления газов в топке; – при уменьшении расхода воды через котел; – при погасании факела в топке.
Все рассмотренные котлы также автоматически отключаются при исчезновении напряжения питания в цепях питания защит. При срабатывании любого из устройств защиты или при исчезновении питающего напряжения соленоиды клапанов отключаются, и подача топлива к котлу прекращается.
Отключение котла – серьёзное нарушение технологического регламента, и поэтому причины его должны быть установлены, проанализированы и устранены. Схема автоматизации котла предусматривает определение причины отключения котла. Аварийное отклонение параметров, вызвавшее останов котла, приводит в действие систему автоматических устройств блокировки и сигнализации.
Автоматические устройства блокировки обеспечивают требуемую последовательность включения и отключения оборудования при пуске, останове котла и разного рода технологических переключениях.
Классификация устройств блокировки:
запретно-разрешающие – препятствуют нарушению последовательности операций по обслужива-
нию установки;
аварийные – отключают агрегат или его отдельные элементы при возникновении аварии в каком-
либо звене; замещения – включают резервное оборудование вместо действующего.
Схема блокировки вращающихся механизмов котла предусматривает автоматическую остановку всех следующих по технологической цепочке механизмов и запрет на включение механизма, если предшествующий по технологической цепочке механизм не работает.
Схема автоматической сигнализации обеспечивает автоматическую подачу световых и звуковых сигналов в случае остановки котла устройством защиты, повышения или понижения давления жидкого топлива и воды в питательных магистралях, а также при других нарушениях в работе основного и вспомогательного оборудования котельной.
Газоснабжение сельских потребителей осуществляется от газовых сетей среднего давления (до 0,3 МПа).
Внутрихозяйственные системы газоснабжения состоят из газорегуляторного пункта (ГРП) или установки (ГРУ), системы распределительных газопроводов и аппаратуры, обеспечивающих прием, учет, дросселирование и раздачу газа потребителям.
Газорегуляторный пункт (рисунок 1) служит для понижения давления газа перед газоиспользующим прибором (котлом, генератором С02 и т. д.) до требуемого по условиям эксплуатации уровня и для автоматической стабилизации этого параметра. Основная причина отклонения параметра от нормы − изменение количества потребляемого газа, связанное с изменением нагрузки или числа одновременно работающих потребителей.
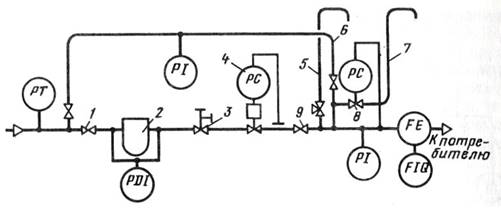
1 и 9 − задвижки; 2 − фильтр; 3 − предохранительно-запорный клапан; 4 − регулятор давления;
5 и 7 − свечи; 6 − обводная линия; 8 − предохранительный сбросной клапан
Рисунок 1 – Схема газорегуляторного пункта
Газ из питающей магистрали среднего давления поступает в корпус фильтра 2, где происходит его очистка от механических примесей (песок, окалина и т. д.), и через предохранительно-запорный клапан 3, обеспечивающий защиту оборудования от недопустимо больших колебаний давления газа за ГРП, подаётся к регулятору давления 4 и затем к газосжигающим устройствам потребителя. Свеча 5 служит для продувки трубопроводов ГРП при включении оборудования в работу. В случае резкого повышения давления газа, связанного, например, с отключением части потребителей, избыток газа сбрасывается в атмосферу через предохранительный сбросной клапан 8 и свечу 7.
Если основное оборудование ГРП должно быть выведено в ремонт или на профилактическое обслуживание, газоснабжение потребителей обеспечивается через обводную линию 6 при закрытых задвижках 1 и 9.
Правила безопасности в газовом хозяйстве предусматривают контроль давления на входе и выходе ГРП (ГРУ) и измерение расхода газа счетчиком или дроссельным расходомером.
Понижение давления газа и стабилизация этого параметра осуществляются пропорциональным регулятором давления косвенного действия типа РДУК (рисунок 2, а), объединяющего в себе командный прибор «пилот» и мембранный ИМ с регулирующим клапаном.
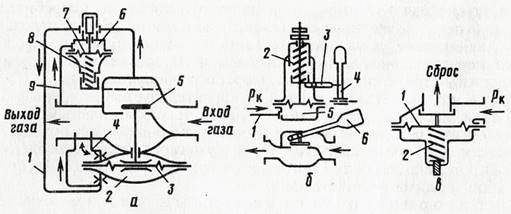 а
− регулятор давления; 1, 4 и 9 − импульсные
трубки; 2 − исполнительный механизм;
а
− регулятор давления; 1, 4 и 9 − импульсные
трубки; 2 − исполнительный механизм;
3 и 7 − мембраны; 5 − регулирующий клапан; 6 − командный прибор «пилот»; 8 − пружина задатчика; б − предохранительно-запорный клапан: 1 − импульсная трубка; 2 − пружина; 3 − коромысло; 4 − молоток; 5 − подмембранная полость; 6 − рычаг с грузом; в − сбросной клапан: 1 − мембрана; 2 − пружина
Рисунок 2 – Оборудование газорегуляторного пункта:
Увеличение (уменьшение) потребления газа приводит соответственно к уменьшению или увеличению давления газа в надмембранный полости «пилота» 6, соединённой с трубопроводом импульсной трубкой 9.
Перемещение мембраны 7 и связанного с ней клапана «пилота» приводит к увеличению (уменьшению) подачи газа из корпуса основного клапана в подмембранную полость ИМ по импульсной трубке 1, перемещению мембраны 3 вверх (вниз) и соответственно открытию (закрытию) регулирующего клапана 5 на величину, пропорциональную отклонению давления газа от уровня, задаваемого силой сжатия пружины 8.
Пропорциональный (П) закон регулирования обеспечивается жёсткой обратной связью, охватывающей исполнительный механизм (ИМ) и выполненной в виде трубки 4, соединяющей выходной коллектор с надмембранной полостью ИМ. «Выключающее» действие ОС проявляется в том, что при перемещении клапана изменяющееся давление в выходном коллекторе создает соответствующее усилие, направленное навстречу воздействию на мембрану ИМ, создаваемому «пилотом».
Параметр настройки П-регулятора (коэффициент пропорциональности) устанавливают на заводе подбором соответствующих сечений дросселей и в процессе эксплуатации ГРП обычно не меняют.
Предохранительно-запорный клапан (рисунок 2, б) предназначен для автоматического прекращения подачи газа потребителю в случае аварийного отклонения давления от заданного уровня.
Подмембранная полость 5 клапана соединена трубкой 1 с выходным коллектором ГРП. При аварийных отклонениях параметра рк перемещение мембраны и связанного с ней штока приводит к повороту коромысла 3, правое плечо которого служит упором для молотка 4. Поворот коромысла освобождает молоток который, падая, воздействует на рычаг с грузом 6, закрывающий клапан и прекращающий подачу газа. Настраивают клапан, изменяя степень сжатия пружины 2.
Предохранительный сбросной клапан (рисунок 2, в) обеспечивает сброс в атмосферу избыточного количества газа в случае повышения его давления, вызванного неравномерным потреблением газа или неустойчивой работой регулятора давления.
Настраивают сбросной клапан, изменяя степень сжатия пружины 2, противодействующей давлению газа на мембрану 1. При этом сбросной клапан должен сработать ранее предохранительно-запорного и предотвратить таким образом отключение ГРП и прекращение подачи газа.
На газопроводе к котлу устанавливают главное отключающее устройство (задвижку), за ним автоматический клапан, отсекающий подачу газа при срабатывании защит котла и, наконец, поворотную регулирующую заслонку, на которую воздействует регулятор тепловой нагрузки котла. На ответвлениях к каждой горелке устанавливают отключающее устройство.
Охлаждение – важнейший способ сохранения качества и удлинения сроков сохранности сельскохозяйственных продуктов, замедляющий протекание в них биологических процессов. Холодильные машины и установки широко применяются на МТФ, предприятиях переработки сельскохозяйственной продукции, в хранилищах картофеля, овощей, фруктов. Охлаждение основано на переносе теплоты от охлаждаемой среды с нижним температурным уровнем Tн к окружающей среде с температурой Tо (Tо>Tн). В сельскохозяйственном производстве получение холода осуществляется при помощи компрессорных холодильных машин, термоэлектрических холодильников и электротепловых насосов.
Компрессионные холодильные машины отличаются по роду хладагента (аммиачные, фреоновые и др.), по холодопроизводительности (малые – до 42 МДж/ч, средние – до 375 МДж/ч и крупные – свыше 375 МДж/ч), по способу охлаждения (системы с непосредственным и рассольным охлаждением), а также по другим признакам.
В сельском хозяйстве наиболее распространены машины малой и средней холодопроизводительности.
Конструкции фреоновых и аммиачных машин аналогичны, за исключением того, что размер цилиндров фреоновых компрессоров больше, чем аммиачных при одинаковой холодопроизводительности. Изза большой плотности фреона-12 и сравнительно (с аммиаком) высокой вязкости диаметры трубопроводов и проходные отверстия клапанов принимают в 2 раза большими, чем в аммиачных машинах. Большинство фреоновых машин оборудуется воздушным охлаждением, а аммиачных – водяным. Они выпускаются полностью агрегатированными или в виде двух агрегатов – компрессорно-конденсаторного и испарительно-регулирующего.
Экономичная работа холодильной машины обеспечивается эффективностью теплообмена конденсатора с охлаждаемой средой и испарителя с охлаждаемым продуктом (или средой) путем поддержания заданных значений температуры и давления хладагента в системе.
Сравнительно простая технологическая схема холодильной установки показана на рисунке 1. В ней предусмотрены два автоматических прибора: сильфонный терморегулирующий вентиль и реле давления. Терморегулирующий вентиль 5, термобаллон которого прижат к всасывающему трубопроводу на выходе из испарителя, регулирует заполнение испарителя жидким фреоном.
Реле давления 7, включенное между всасывающей и нагнетательной линиями компрессора 1, регулирует общую холодопроизводительность машины путем периодического включения и выключения компрессора. Если холодопотребление уменьшается, то давление кипения при работе компрессора понижается, разность давлений возрастает и компрессор включается. Обратное включение его произойдет тогда, когда разность давлений снизится до значения, на которое отрегулировано реле давления.
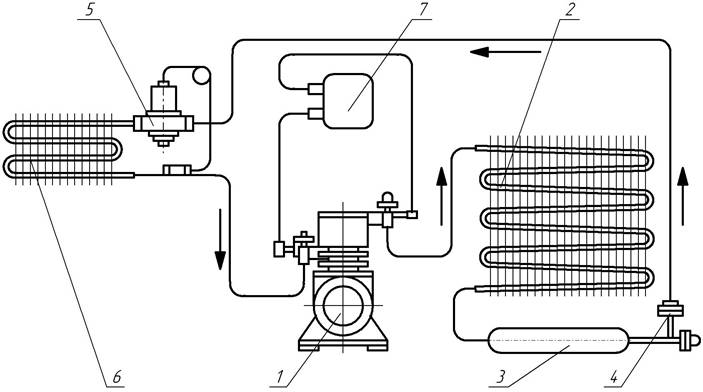
1 – компрессор; 2 – конденсатор; 3 – ресивер; 4 – фильтр; 5 – терморегулирующий вентиль;
6 – испаритель; 7 – реле давления
Рисунок 1 – Принципиальная схема автоматической фреоновой холодильной установки с воздушным компрессором
Молоко – ценный, но скоропортящийся продукт. Чтобы повысить стойкость молока при хранении, его необходимо охлаждать немедленно после первичной обработки до определенной температуры в зависимости от сроков хранения. Оборудование для охлаждения молока включает в себя охладители молока и аппараты для охлаждения промежуточного хладагента (воды, рассола). При охлаждении молоко отдает теплоту промежуточному хладагенту.
Для получения и аккумулирования искусственного холода на фермах используют автоматизированные фреоновые холодильные установки типа МХУ с холодопроизводительностью от 12,6 до 50,2 МДж/ч. Основные узлы установок МХУ следующие: компрессор, воздушный конденсатор, ресивер, фильтр-осушитель, вентилятор, теплообменник, испаритель, терморегулирующий вентиль, реле давления и насос.
На рисунке 2 показана электрическая схема холодильной установки МХУ-8С с холодопроизводительностью 33,5 МДж/ч.
Установка может работать в трех режимах: автоматическом, ручном и в режиме намораживания льда.
В автоматическом режиме переключатель SA1 ставят в положение «A». Промежуточное реле KL1 получает питание и замыкающими контактами включает магнитный пускатель электродвигателей компрессора и вентилятора KM1.
Если температура хладагента снизится до 2°С, размыкаются контакты термодатчика SK1, лишая питания реле KL3 и магнитный пускатель KM1, который отключает холодильную установку. Когда температура повысится до 2,5°С, контакт датчика SK1 замыкается, и установка опять включается. В дальнейшем этот цикл повторяется.
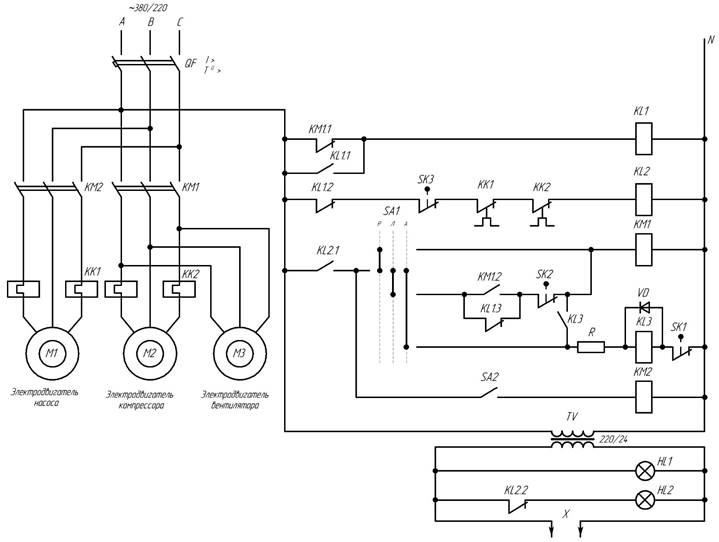
Рисунок 2 – Принципиальная электрическая схема холодильной установки МХУ-8С
В ручном режиме переключатель SA1 ставит в положение «Р», срабатывает пускатель KM1 и включает в работу двигатели компрессора и вентилятора.
Электродвигатель насоса во всех случаях включают вручную тумблером SA2.
Отключают установку, ставя переключатель в положение «О».
В режиме намораживания льда переключатель SA1 ставят в положение «Л», и установка включается в работу. При достаточном намораживании льда температура паров фреона во всасывающем трубопроводе понизится, и термореле SK2, настроенное на заданную температуру, разомкнёт свои контакты и отключит холодильную установку. Повторное включение установки возможно лишь при повышении температуры и отключении, а затем включении вводного автомата QF1.
Установка отключается также, если значения давления или нагнетания выходят из заданных пределов настройки реле давления SK3.
|
|
Видеоматериалы к занятию |
ТЕМА 2.9 АВТОМАТИЗАЦИЯ УСТАНОВОК
ДЛЯ ЭЛЕКТРИЧЕСКОГО ОБЛУЧЕНИЯ
Искусственное облучение в защищенном фунте применяют при выращивании рассады и в селекционных целях.
Несмотря на увеличение себестоимости рассады досвечивание эффективно, поскольку увеличивает урожай на 20...30 % и ускоряет его получение на 10…15 дней.
В качестве источников искусственного освещения используют чаще всего ртутные лампы ДРЛФ400Е, ДРЛФ-400И, ксеноновые лампы ДКСТЛ, спектр излучения которых близок к солнечному. Удельная мощность излучателей в зависимости от зоны расположения теплицы колеблется от 100 до 250…300 Вт/м2.
Выпускают серийные тепличные облучатели ОТ-400 и ОТА-520 с лампами ДРЛФ-400. В комплект последних входят также три люминесцентные лампы мощностью по 40 Вт каждая.
Включение систем досвечивания осуществляют от фотореле или реле времени. При этом суммарная продолжительность светового дня не должна быть более 14…18 ч. Особенность этих систем управления – строгая последовательность (поочерёдность) включения отдельных групп ламп, позволяющая избежать ударных нагрузок на источник электроснабжения.
Ксеноновые лампы ДКСТЛ мощностью 10 кВт используют в комплектных системах типа СОРТ-110. Включение этих систем осуществляется оператором, а розжиг лампы – специальным устройством (рисунок 1), содержащим зарядный трансформатор Т1, разрядник, батарею конденсаторов C1, C2 и трансформатор поджига Т2, в течение 5…15 с вырабатывающий импульсы напряжением 25 кВ в моменты пробоя воздушного промежутка разрядника. Эксплуатация такого рода устройств требует выполнения ряда условий, в том числе защиты растений от мощного инфракрасного излучения лампы, минимального удаления ламп от щита управления и др.
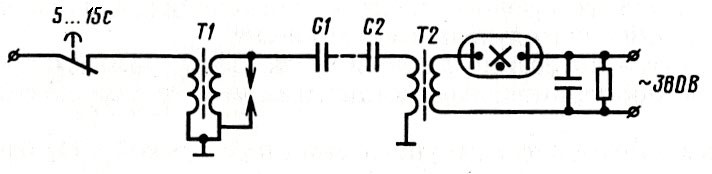
Рисунок 1 – Схема устройства для розжига ксеноновых ламп
Ультрафиолетовое облучение, применяемое главным образом для компенсации недостатка естественного излучения, в значительной мере повышает продуктивность животных и птицы.
Рассмотрим подвесную установку типа УО-4. Данная установка (рисунок 2) состоит из четырёх облучателей 2 с ртутными лампами высокого давления ДРТ-375, приводной станции и несущей конструкции 1. Облучатели подвешиваются на тросах и перемещаются вдоль птичника.
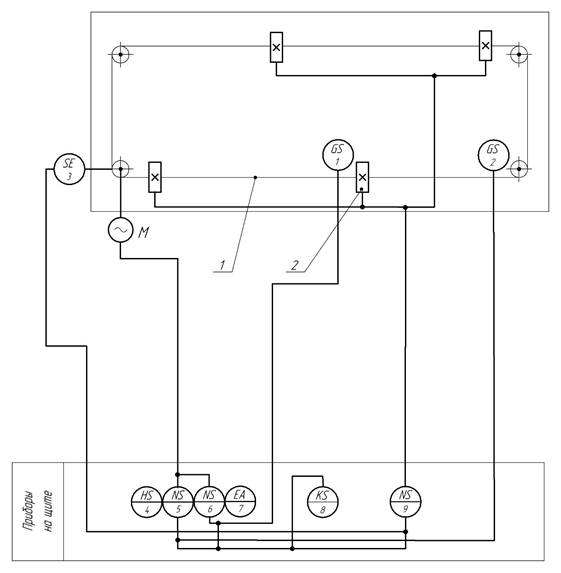
Рисунок 2 – Функциональная схема автоматизации ультрафиолетового облучения
Суточный режим ультрафиолетового облучения задаётся программным реле типа 2РВМ (позиция 1) с учётом необходимого числа проходов над животными. Это реле управляет включением облучателей и их движением.
При наступлении времени облучения программное реле включает облучатели. После их разогрева (через 5…10 минут) данное реле даёт команду на запуск электродвигателя привода движения облучателей. При достижении облучателем конца прохода срабатывает конечный выключатель (позиция 2), и движение начинается в обратном направлении. Задатчиком (позиция 4) задаётся число проходов установки. Этот задатчик представляет собой переключатель в сочетании с шаговым искателем, щётки которого перемещаются на одну ламель при совершении прохода. По завершении всех проходов движение облучателей прекращается. При аварийной остановке облучателей во избежание ожогов и гибели животных или птицы реле контроля скорости (позиция 3) воздействует на аппаратуру управления лампами и обесточивает их.
На рисунке 3 показана схема автоматизации установки ультрафиолетового облучения, позволяющая задавать ежесуточно необходимое число проходов облучателя.
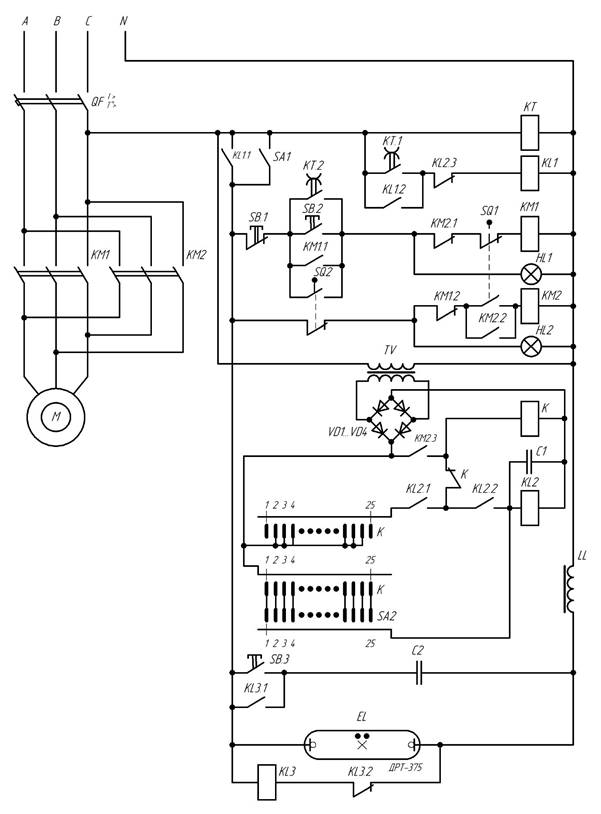
Рисунок 3 – Принципиальная электрическая схема управления облучательной установкой УО-4
В автоматическом режиме работы (тумблер SA1 разомкнут) время включения установки задаётся при помощи реле времени KT (2PBM), а число проходов облучателя – многопозиционным переключателем SA2.
В определённое время замыкается контакт KT в цепи катушки промежуточного реле KL1, которое подает напряжение на лампу ДРТ-375 и на параллельно присоединённое к ней реле максимального напряжения KLЗ. В первый момент напряжение на лампе высокое, и реле напряжения KLЗ начинает срабатывать, периодически подключая замыкающим контактом конденсатор С2, что приводит к зажиганию лампы. В процессе разогрева лампы напряжение на ней падает и реле KL3 прекращает срабатывать. Спустя 15…20 мин замыкается контакт реле времени KL1 в цепи катушки магнитного пускателя KM1 и электродвигатель М приводит в движение облучатели.
В противоположном конце помещения приводной двигатель реверсируется конечным выключателем SQ1, который выключает магнитный пускатель KM1 и включает KM2. Облучатели начнут двигаться в обратном направлении, катушка шагового искателя K получит питание, и его щётки передвинутся на одну ламель.
Облучатели сделают столько полных проходов (туда и обратно), на какое число будет установлен переключатель SA2. Когда щётки искателя станут на ламель, соединенную с заданной оператором ламелью переключателя SA2, реле KL2 обесточит KL1, которое отключит двигатель и лампы.
Кроме того, катушка шагового искателя получит питание через контакты реле KL2.2 и короткозамкнутое поле искателя K. В результате щётки искателя будут передвигаться до тех пор, пока не попадут на разомкнутые контакты 1 и 25. Шаговый искатель K возвратится в исходное положение, и схема окажется подготовленной к следующему циклу работы.
Инфракрасное излучение используют во многих технологических процессах сельскохозяйственного производства для обогрева молодняка животных и птиц, сушки сельскохозяйственных продуктов и др.
Источники инфракрасных излучений принято делить по спектральному составу на светлые и тёмные.
Светлые источники инфракрасных излучений конструкцией и принципом действия не отличаются от ламп накаливания. Однако их нить накала рассчитана на меньшую, чем в осветительных лампах, температуру (Т= 2270...2770 К).
Промышленность выпускает инфракрасные зеркальные лампы типа ИК3220-500, ИК3220-250 и инфракрасные кварцевые галогенные лампы КГ220-1000-1. Часть колбы этих ламп изнутри покрыта слоем алюминия или серебра, что обеспечивает концентрацию излучения в нужном направлении. Колба ламп типа ИКЗК покрыта красным термостойким лаком, несколько ослабляющим световой поток ламп, но уменьшающим явление каннибализма у животных и птиц. Пониженная температура нити накала инфракрасных ламп способствует увеличению срока их службы до 5000 ч.
Тёмные излучатели изготовляют в виде трубчатых электронагревательных элементов (ТЭНов). Темные излучатели применяют в специальной арматуре, которая служит для перераспределения потока излучения в пространстве и для защиты нагревательного элемента от механических повреждений и прикосновения обслуживающего персонала.
Для инфракрасного облучения сельскохозяйственных животных и птиц применяют следующие облучатели, относящиеся к светлым источникам.
Инфракрасный облучатель ССПО1-250 состоит из пластмассового корпуса, лампы ИК3220-250 и эмалированного защитного кожуха с сеткой, предохраняющей лампы от механических повреждений.
Инфракрасные облучатели ОРИ-1 и ОРИ-2 представляют собой конический корпус из листовой стали. Сверху облучателя под пластмассовым колпаком расположен фарфоровый патрон Е40. Облучатель ОРИ-1 выпускают с инфракрасной лампой мощностью 500 Вт, ОРИ-2 предназначен для инфракрасных ламп типа ПС-70/Е-11010-375.
Облучатель ОРИ-1 предназначен для ламп типа ИК3220-250-1 и ИК3220-250.
Подвесной облучатель «ЛатвИКО» с галогенной лампой КГ220- 1000-1 крепят к натянутому тросу проволокой за проушины корпуса. Корпус облучателя имеет коробчатую форму, изготовлен из оцинкованной жести. Снизу лампа защищена металлической сеткой.
Стационарные автоматизированные установки типа ИКУФ и «Луч» предназначены для одновременного инфракрасного и ультрафиолетового облучения молодняка животных и птиц. Установки имеют, как правило, 40 облучателей и пульт управления. Каждый облучатель содержит две лампы ИК3220-250 и одну эритемную ЛЭ15 или эритемно-осветительную ЛЭ015.
Облучатели установок ИКУФ-1 и ИКУФ-1М (рисунок 1) аналогичны. Отличие состоит в том, что в установке ИКУФ-1М облучатель имеет герметичное исполнение и на нем нет переключателей, предназначенных для индивидуального управления инфракрасным обогревом и ультрафиолетовым облучением молодняка.
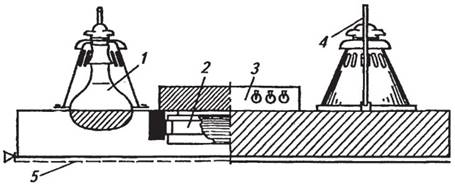
1 – лампа ИК-излучения; 2 – лампа УФ-излучения; 3 – корпус; 4 – подвеска; 5 – защитная сетка
Рисунок 1 – Устройство облучательной установки ИКУФ-1
Пульт управления установок типа ИКУФ состоит из трансформатора 220/127 В, автоматических выключателей QF, магнитных пускателей KМ1 и KМ2 и реле времени KТ типа 2РВМ. На лицевой панели пульта расположены переключатель рода работ, кнопки включения и отключения ламп SB1...SB4, сигнальные лампы HL1, HL2 (рисунок 2).
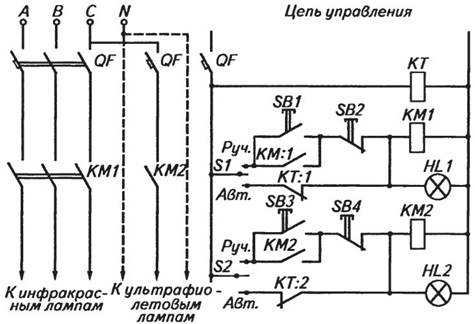
Рисунок 2 – Схема управления установкой ИКУФ-1
Облучатель «Луч» (рисунок 3) имеет уплотненное исполнение патронов эритемной лампы, а патроны инфракрасных ламп могут быть установлены под различными углами к вертикали для получения требуемого распределения инфракрасного излучения по облучаемой поверхности. В схеме управления этого облучателя имеется регулятор для изменения напряжения питания инфракрасных ламп.
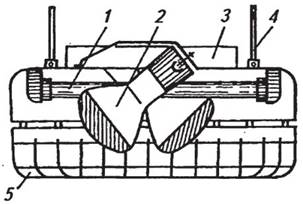
1 – лампа УФ-излучения; 2 – лампа ИК-излучения; 3 – корпус; 4 – подвеска; 5 – защитная сетка Рисунок 3 – Облучатель «Луч»
Принципиальная электрическая схема установки «Луч» с использованием автотрансформатора типа АТ-10 показана на рисунке 4. Управление работой инфракрасного обогрева и ультрафиолетового облучения осуществляется в двух режимах – ручном и автоматическом. При ручном режиме переключатель SA2 устанавливают в положение «Р», и напряжение подается на катушку электромагнитного пускателя KM1, который срабатывает и включает инфракрасные лампы на напряжение, веданное переключателем SA1 и трансформатором TV1. Для отключения инфракрасных ламп переключатель SA2 переводят в нейтральное положение. В этом же положении переключателя SA2 осуществляется изменение напряжения на лампах ИКЗК220-250, для чего переключатель SA1 устанавливают в положение 1, 2, 3 и т. д. в зависимости от требуемого напряжения. Лампы ЛЭ-15 (ЛЭО-15) включают и отключают переключателем SA3, устанавливая его в положение «Р» и нейтральное соответственно. В этом случае ультрафиолетовые (витальные) Лампы ЛЭ-15 (ЛЭО-15) подключаются через электромагнитный Пускатель KМ2 на отпайку трансформатора TV1 с напряжением 127 В.
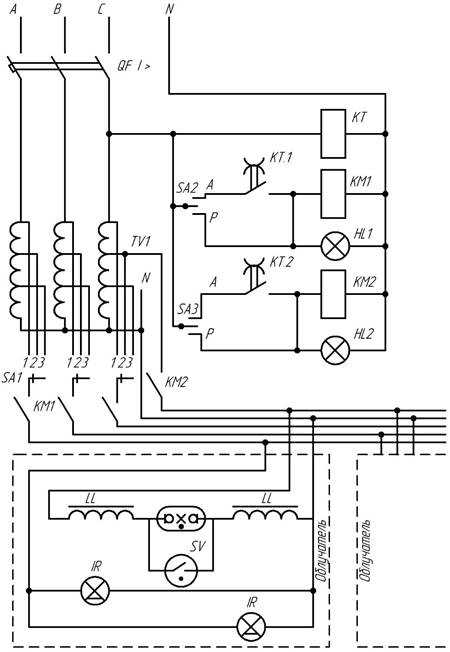
Рисунок 4 – Принципиальная электрическая схема управлении установкой «Луч» с использованием
автотрансформатора типа АТ-10
В автоматическом режиме (переключатели SA2 и SA3 в положении А) управление работой инфракрасных и ультрафиолетовых ламп осуществляется от реле времени KТ (типа 2РВМ), Где контакты промежуточного реле первой программы КТ.1 включают инфракрасные, а второй программы KТ.2 – витальные лампы, Суточная программа длительности пауз:, и включения инфракрасных и ультрафиолетовых ламп задается на программное реле времени в соответствии с технологическими и биологическими ритмами жизни животных (кормление, отдых).
Эффективность применения инфракрасного излучения в значительной мере зависит от режима облучения. Так, для облучения поросят необходимо в свинарниках-маточниках создавать два температурных режима: один для подсосных маток, другой для поросят-сосунов. Поросят в подсосный период следует облучать в зоне их отдыха при помощи облучателей ОРИ-2, ССПО1-250. Облучатели установок ИКУФ, «Луч», ОРИ-1, «ЛатвИКО» используют для облучения двух смежных станков, размещая их над перегородкой. Если в помещении отсутствует система общего обогрева, то облучатели установок ИКУФ, «Луч» размещают по одному на каждое станкоместо.
При температуре воздуха в животноводческом помещении более 16 °С инфракрасные лампы облучателей ИКУФ переключают на последовательное соединение.
Для облучения телят наиболее целесообразно применять облучательные установки ИКУФ и «Луч». При содержании телят в клетках один облучатель используют для облучения двух животных в смежных клетках. При групповом содержании телят оборудуют обогреваемую площадку из расчета один облучатель на 4 м2. Режим облучения телят – прерывистый с выключением на 30 мин через 1...1,5 ч работы установки. В первые 2...3 дня жизни, когда телята много лежат, высота подвеса облучателей 0,5...0,6 м, потом ее увеличивают до 1,2 м.
ТЕМА 2.10 АВТОМАТИЗАЦИЯ РЕМОНТА
СЕЛЬСКОХОЗЯЙСТВЕННОЙ ТЕХНИКИ
Диагностирование – это определение состояния объекта с указанием места, вида и причин дефектов, нарушений, повреждений и т. п. Внедрение технического диагностирования дает существенный технико-экономический эффект и является основным звеном планово-предупредительной системы технического обслуживания и ремонта сельскохозяйственной техники. Оно позволяет на 10... 15 % повысить межремонтный ресурс сельскохозяйственных машин, устранить необоснованную разборку сборочных единиц, ускорить, снизить на 30 % трудоемкость обслуживания и ремонта, повысить мощность, экономичность и надежность техники. Благодаря своевременному диагностированию и обслуживанию на 20 % сокращается число ремонтов и на 20...30 % – потребность в запасных частях. Постоянно совершенствуются методы и технические средства диагностирования, разработаны электронные приборы и автоматические системы технической диагностики сельскохозяйственной техники.
Диагностирование делят на три основных этапа: получение информации о техническом состоянии объекта; обработка и анализ полученной информации; постановка диагноза и принятие решения. На основе проведенной диагностики устанавливают вид и объем ремонтных работ, проверяют готовность машин и приводят их в работоспособное состояние.
Виброакустические методы диагностики позволяют регистрировать амплитуду акустических сигналов (шумов и вибраций) и оценить характер их изменений. Амплитуда и частота шумов и вибраций изменяются по мере изнашивания деталей и увеличения зазоров сопряженных деталей. Задача виброакустической системы диагностики (рисунок 1) заключается в выделении сигнала, создаваемого возникшим дефектом, из многочисленных акустических помех, возникающих при нормальной работе агрегата, т. е. из сложных колебаний необходимо выделить информационную составляющую сигнала. Для этого используют приборы спектрального анализа, позволяющие выявлять причину, частоту и мощность вибраций, возникших из-за дефектов.

Рисунок 1 – Структурная схема акустической системы диагностики
Для этого на объекте диагностики ОД устанавливают датчик акустических колебаний ПП (первичный преобразователь), с которого электрический сигнал подается на усилитель У, а затем на анализатор А. На выходе анализатора поочерёдно выделяются составляющие (гармоники) акустических колебаний и в виде переменного напряжения подаются в квадратор К, а затем в интегратор И и измерительный прибор ИП. Квадратор на выходе дает значение мощности (в виде квадрата напряжения), а интегратор усредняет мощность вибраций исследуемого диапазона частот за определенный промежуток времени. Значение мощности регистрирует ИП.
Сельскохозяйственную технику эксплуатируют в различных климатических условиях. Поверхности тракторов, автомобилей и сельскохозяйственных машин в результате контакта с почвой, растениями, топливо-смазочными материалами, удобрениями, а также из-за переменных температурных режимов работы покрываются загрязнениями разнообразного состава. По природе возникновения различают эксплуатационные и производственные загрязнения. К эксплуатационным относят дорожную грязь, растительные остатки, остатки провозимых продуктов, лакокрасочные покрытия, продукты коррозии, накипь, нагар, лаковые, асфальто-смолистые и масляно-грязевые отложения, различные смазки, масла. Производственные загрязнения – это пыль, стружка, абразив, окалина, шлаки, продукты износа при обкатке и др.
Загрязнения разных видов встречаются в самых разнообразных сочетаниях. В связи с этим применяют различные по составу, свойствам и назначению эффективные моющие средства.
Мойка агрегатов делится на три стадии:
– мойка наружная неразборная (трактор моют в полном сборе водой); – мойка частично разобранных агрегатов; – мойка отдельных деталей.
При наружной мойке агрегат загоняют в камеру (рисунок 2), закрывают дверь и включают насос моющего раствора.
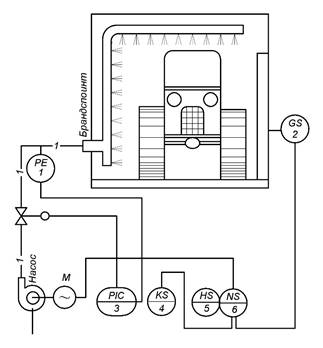
Рисунок 2 – Функциональная схема автоматизации наружной мойки
Автоматизация этой операции основывается на поддержании давления моющего раствора (датчик давления PE1 с регулятором PIC3), блокировки двери (конечный выключатель GS2). Работа насосной установки ограничена во времени (реле времени KS4).
Мойка отдельных узлов и частично разобранных частей производится в моечных установках камерного типа (рисунок 3).
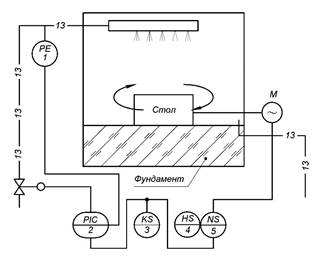
Рисунок 3 – Функциональная схема автоматизации мойки частично разобранных частей
Перед процессом мойки детали загружают на моечный стол, закрывают и дверь. Затем подают раствор для мойки (щелочной с водой или солярка). Во время мойки стол с деталями вращается. Использованный раствор удаляется через сток. Автоматизация данного процесса заключается в создании необходимого давления раствора и ограничении во времени процесса мойки.
Мойка деталей и крепёжного материала производится в барабанной камере (рисунок 4). Автоматизация барабанного моечного агрегата заключается в ограничении времени мойки при помощи реле времени.
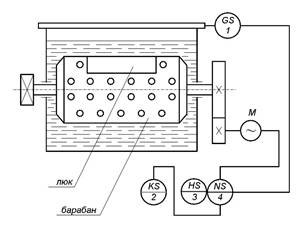
Рисунок 4 – Функциональная схема автоматизации мойки деталей и крепёжного материала
Автоматизация разборочных и сборочных процессов сопряжена с большими трудностями, исходящими из специфики выполнения работ. Поэтому разборочные и сборочные операции выполняют в мастерских пока вручную. Однако на поточных линиях широко применяют механизированные приспособления: гайковёрты, винтовёрты, гидравлические и пневматические молоты, прессы для запрессовки, дрели и т. п.
При сборке агрегатов используют кран-балки, тали, тельферы и автоматические линии подачи деталей к месту сборки, транспортирования собираемого агрегата на следующее рабочее место.
Наиболее сложные процессы автоматической сборки – ориентация деталей относительно друг друга и сопряжение их. Обычно некоторые сборочные операции, легко выполняемые вручную, трудно поддаются автоматизации, и, наоборот, трудно выполняемые вручную операции легко могут быть автоматизированы.
Автоматизация сборки требует в ряде случаев изменения конструкции сборочных приспособлений и самих деталей. Технологический процесс сборки должен выполняться с наименьшим числом перемен положения деталей.
На ремонтных заводах и в мастерских для подъема, опускания и перемещения ремонтируемых агрегатов, машин и оборудования используют электрокары, тельферы и мостовые краны. Наибольшее распространение получили тельферы – подвесные тележки.
Грузоподъемность тельферов – от 0,2 до 5 т. Тельферы малой грузоподъемности имеют один электродвигатель для подъема деталей, а их тележку вручную перемещают вдоль балки.
Тельферы большой производительности имеют два электродвигателя для подъема M1 и перемещения М2 (рисунок 5). Управляет тельфером персонал мастерской при помощи кнопочной станции 1. Подъёмный барабан 3 приводится во вращение двигателем 2 (M1). Перемещается тельфер и закрепленный на крюке 4 груз по двутавровой балке 8 на ходовых колесах 9, которые приводятся во вращение электродвигателем 10 (М2) через редуктор. Электрическая энергия к двигателям подводится по гибкому кабелю или жестким троллеям.
Каждый электродвигатель работает, пока нажаты пусковые кнопки подъёма груза SB1, спуска SB2, перемещения вперед SB3 и назад SB4. При отпускании кнопки разрываются соответствующие цепи магнитных пускателей KМП…KМН, и электродвигатели отключаются от сети. Такой метод управления назван толчковым.
Конечные выключатели 5, 7 и 11 ограничивают перемещение груза при его подъеме SQ1 и горизонтальном передвижении SQ2 и SQ3. При их размыкании двигатели останавливаются.
Электродвигатель подъема груза имеет электромагнитный тормоз 6 (ЭТ), который при включенном двигателе освобождает барабан 3, а в отключенном положении стопорит его, исключая самопроизвольное спускание груза.
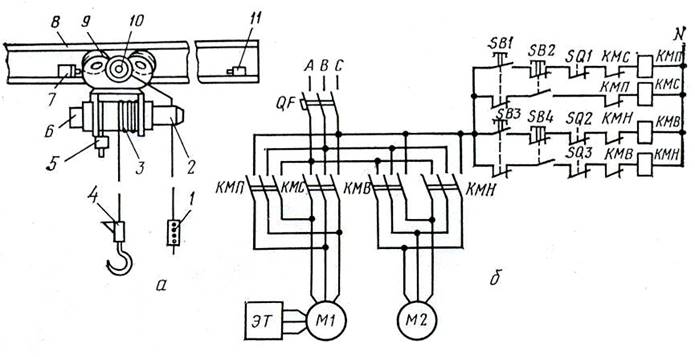
Рисунок 5 – Общий вид тельфера (а) и принципиальная электрическая схема управления (б)
|
|
Видеоматериалы к занятию |
Износ деталей заключается в уменьшении диаметра валов, шеек, пальцев и т. д., а также в увеличении диаметров отверстий деталей, в стирании плоских трущихся поверхностей, кроме этого, возможен слом деталей. Устранение этих дефектов в мастерских является экономически целесообразным мероприятием.
Способы восстановления деталей
– сварка на постоянном и переменном токе;
– наплавка металла под слоем флюса (дуга постоянно горит между ремонтной деталью и электродом, расплавленный металл равномерно покрывает слой детали, для однородности наплавки он покрывается слоем сыпучего флюса, для этого применяются универсальные наплавочные головки типа
ОКС-1252-А); наплавляют шейки колен валов и внутренние поверхности деталей;
– электролитические способы восстановления поверхностей деталей: хромирование, никелирование, обмеднение, осталивание – обработанные детали предварительно помещают в ванну, заполненную соответствующим электролитом, к опущенным в ванну электродам подводится постоянный ток напряжением 6…12 В;
– электроэрозионный способ – искровой способ обработки (восстановление ведётся в жидком диэлектрике (трансформаторное масло); к электроду подводят «плюс», к детали – «минус»; с детали металл переходит на электрод).
Технология восстановления изношенных деталей сельскохозяйственной техники гальваническим способом основана на осаждении металлов путём электролиза водных растворов солей металлов или кислот (хромирования).
На деталь (катод) подводят отрицательный потенциал источника питания. В качестве анода используют пластину из металла, который необходимо нанести на деталь, или пластины из нерастворимого металла, например свинца (при хромировании). К пластинам присоединяют положительный потенциал источника питания. Внешний вид электролитической установки восстановления деталей приведён на рисунке 1.

Рисунок 1 – Внешний вид электролитической установки восстановления деталей.
Детали перед гальваническим наращиванием проходят специальную обработку. Их шлифуют, промывают, обезжиривают, протравливают (декапируют) в растворах серной, фосфорной или хромовой кислот, снова промывают, а затем подвешивают в электролитических ваннах и подсоединяют к отрицательному электроду источника питания. На места деталей, не подлежащие наращиванию металла, наносят электроизоляционные материалы.
Для получения качественного наращивания металлов используют различные методы изменения полярности и формы тока электролиза: а) автоматическое реверсирование тока, то есть периодическую смену полярности напряжения на детали с отрицательной на положительную, и наоборот. Длительность нахождения детали под отрицательным напряжением – на порядок более чем под положительным напряжением; б) использование асимметричного тока, то сеть выпрямленного тока с различным коэффициентом выпрямления.
Универсальный источник тока для питания электролитических ванн (рисунок 2) разработан в МИИСПе.
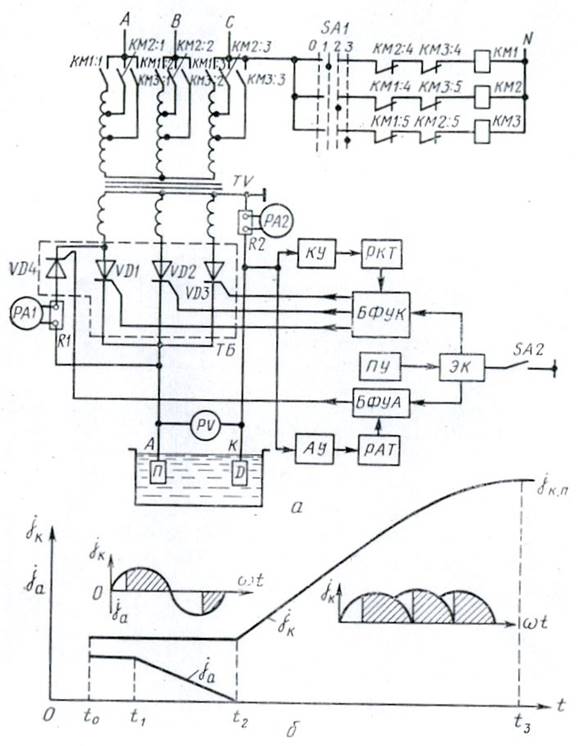
Рисунок 2 – Принципиальная электрическая схема электролитической установки (а) и диаграмма изменения плотности тока при железнении деталей (б)
Источник позволяет вести процесс наращивания металла на однофазном асимметричном и на трёхфазном выпрямленном токах с возможностью перехода с одного режима на другой без прерывания тока и с высокой точностью стабилизации и регулирования составляющих тока.
Источник выполнен в виде двух функциональных блоков: силового и управляющего. Силовой блок содержит понижающий трансформатор 10 кВ∙А TV, тиристорный блок ТБ, шунты R1 и R2 в цепях измерения тока. Блок управления имеет катодный КУ и анодный АУ усилители, регуляторы катодного РКТ и анодного PAT токов, блоки фазоимпульсного управления катодными тиристорами VD1…VD3 (БФУК) и анодным тиристором VD4 (БФУА), электродный коммутатор ЭК.
Переключателем SA1 при помощи магнитных пускателей KM1…KM3 можно получить три значения выходного напряжения на трансформаторе TV: 6, 12 и 24 В при максимально возможном токе 1200, 600 и 300 А. Амперметр РА1 измеряет значение анодного тока, амперметр РА2 – значение постоянной составляющей выпрямленного катодного тока.
В качестве первичного преобразователя силы тока используют сопротивление шунта R2, через который протекают катодные и анодные составляющие тока. Напряжение сигнала с шунта R2 усиливается однополупериодными усилителями КУ и АУ, собранными на операционных микросхемах. Усилитель КУ одновременно инвертирует сигнал.
Блок БФУК поочередно управляет коммутацией тиристоров VD1...VD3, а БФУА – коммутацией тиристора VD4.
На блоки БФУК и БФУА подаются управляющие импульсы от электронного коммутатора ЭК с частотой 1 кГц. При отключенном переключателе SA2 работают тиристоры VD4 и VD1, которые обеспечивают асимметричную форму тока, показанную в левой части рисунка 2, б. При включенном SA2 работают тиристоры VD1...VD3. Они дают пульсирующую форму выпрямленного тока, показанную в правой части рисунка 2, б.
Путём переключения первичной обмотки трансформатора устанавливают заданную плотность тока на восстанавливаемой детали (от 3 до 6 кА/м2). При помощи программного механизма ПУ автоматически изменяют в процессе гальванопокрытий угол открытия тиристоров VD1...VD4 в соответствии с временной диаграммой рисунка 2,б.
Процесс осаждения металла разбивается на несколько циклов. После погружения деталей в ванну и подключения электродов включается программное устройство ПУ, которое через определённую выдержку времени t0 устанавливает заданные для детали плотности тока прямой полуволны (катода jк) и обратной полуволны (анода jа). Через время t1, равное около 1 мин, программное реле в течение t2=3 мин плавно снижает плотность тока jа до нуля. После этого за время t3 происходит плавное увеличение плотности выпрямленного катодного тока до предельного значения jк.п. Плотность тока jк и время t3 выбирают и корректируют в зависимости от заданных параметров микротвёрдости, сцепляемости и толщины наращиваемых покрытий, а также от температуры, кислотности и концентрации электролитов.
Выдержка деталей без тока продолжительностью t0= 10...60 с необходима для выравнивания температур электролита и деталей, что обеспечивает лучшую сцепляемость первого слоя покрытия с деталью.
Малая плотность тока (менее 300 А/м2) и наличие анодного тока в периоды t1 и t2 обеспечивают осаждение мягкого подслоя железа с небольшими внутренними напряжениями. Применение асимметричного тока повышает производительность процесса в 2…3,5 раза, улучшает сцепление покрытия с основой и позволяет получать покрытие с заданной микротвёрдостью.
При помощи программного устройства ПУ происходит автоматическое управление параметрами режимов обработки, а именно: стабилизацией температуры электролита, плотностью тока, кислотностью растворов и временем выдержки деталей в ванне, обеспечивающим заданную толщину покрытий. Программное устройство имеет соответствующие регуляторы.
Автоматическое регулирование температуры особенно важно при хромировании, химическом никелировании и железнении. В этих процессах колебания температуры электролита не должны превышать ±2°С. Для малых ванн применяют двухпозиционные регуляторы, для больших – регуляторы пропорционально-интегрального действия, которые управляют электрическим обогревателем раствора.
Автоматическое регулирование плотности тока осуществляют путём изменения угла открытия тиристоров VD1…VD4. Заданное значение плотности тока устанавливается программным устройством ПУ в зависимости от режима электролиза, а фактическое – измеряется и определяется по значению падения напряжения на шунтах-резисторах R1 и R2. Фактическое значение тока доводится до заданного при помощи выпрямителей КУ и АУ, регуляторов тока РКТ и PAT и блоков управления БФУК и БФУА тиристорами.
Автоматическое регулирование кислотности обеспечивает получение качественных осадков металла на деталях. Измеряют кислотность рН-метрами, а корректируют её путём добавления в электролит щёлочи или кислоты.
Автоматическое регулирование заданной толщины покрытия осуществляется либо при помощи счётчика ампер-часов, либо при помощи программного реле времени.
Гальванические цеха оборудуют поточными линиями, в которых обрабатываемые детали транспортируют по определенной программе. Программой предусматривается необходимая последовательность перемещения и время выдержки в ваннах деталей при обезжиривании, промывке, декапировании, гальванопокрытии, сушке и других операциях. С этой целью гальванические поточные линии образуются манипуляторами и автооператорами, которые перемещают детали из ванны в ванну в соответствии с заданным технологическим процессом.
Автоматизация гальванических процессов повышает качество покрытий и снижает стоимость обработки, снижает трудоемкость работ и расход химикатов, улучшает условия труда и ускоряет процесс ремонта.
|
|
Видеоматериалы к занятию |
Обкатка – завершающая операция при ремонте двигателей внутреннего сгорания (ДВС). Отремонтированный двигатель трактора или автомобиля нельзя сразу пускать в эксплуатацию, так как это может привести к нагреву трущихся деталей и к заклиниванию узлов агрегата. В процессе обкатки выявляются и устраняются дефекты, снижающие надёжность ДВС в эксплуатации.
Обкатку производят на обкаточном стенде (рисунок 1), на котором электродвигатель соединён муфтой с ДВС.
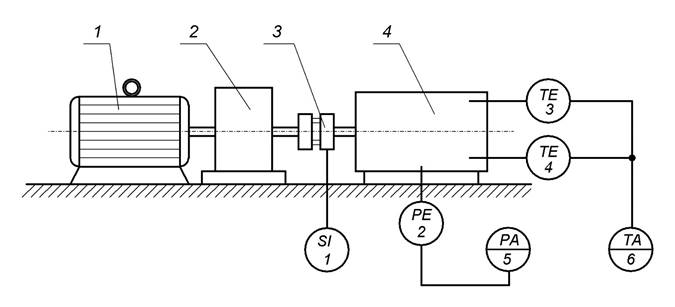
1 – электродвигатель; 2 – редуктор; 3 – муфта; 4 – двигатель внутреннего сгорания Рисунок 1 – Функциональная схема обкаточного стенда
Стенд оборудован пультом управления, на котором размещены:
– тахометр SI1 для измерения оборотов вала,
– манометр PE2 для измерения давления масла для измерения давления масла в системе смазки ДВС,
– дистанционные термометры ТЕ3 и ТЕ4 на 125 °С, контролирующих температуру картерного масла и воды,
– сигнальная лампа, сигнализирующая о необходимости отключения электродвигателя.
На стенде установлен асинхронный электродвигатель М1 с фазным ротором, запуск которого производится при помощи жидкостного пускового реостата (рисунок 2). В качестве привода электродов применяют исполнительный механизм, состоящий из однофазного асинхронного электродвигателя М3 и редуктора. Редуктор вращает вал, на котором укреплены сегменты электродов.
В качестве жидкости используется раствор соли. Электроды выполнены в виде стальных сегментов. Раствор перемешивается центробежным насосом (мешалкой), приводимой в движение электродвигателем М2.
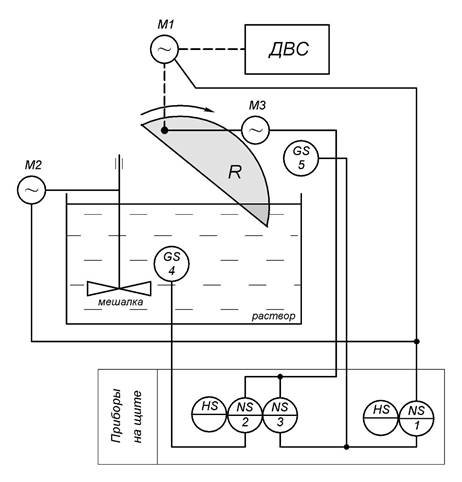
Рисунок 2 – Функциональная схема управления электродвигателем привода ДВС
Этапы обкатки ДВС:
1. Холодная обкатка. Электродвигатель вращает ДВС, при этом в картер ДВС заливают масло. Рубашку блока заполняют водой при температуре от 65 до 75 °С. Длительность холодной обкатки: у тракторных двигателей – от 50 до 70 минут, у автомобильных двигателей – от 20 до 30 минут. Изменяя реостатом скорость вращения электродвигателя, проверяют параметры ДВС.
2. Горячая обкатка на холостых оборотах и под нагрузкой. Заводят ДВС, и он вращает электродвигатель, вал которого в данном случае вращается с частотой, большей частоты вращающегося магнитного поля, поэтому электродвигатель будет работать в режиме рекуперативного генераторного торможения (то есть работать в качестве генератора). Нагрузкой для него является жидкостный реостат. Чем глубже электроды погружены в раствор, тем больше будет нагрузка. Это видно на моментомере.
3. Испытание, контрольный ремонт и приёмка ДВС из ремонта.
Перед началом работы включается автоматический выключатель QF (рисунок 3). При нажатии кнопки SB.1 катушка контактора KM1 получает питание, если замкнут контакт SQ1.1 конечного выключателя, контролирующего положение электродов жидкостного реостата. Магнитный пускатель KM1 включает главный двигатель M1 и двигатель центробежного насоса М2.
При нажатии кнопки SB3 получает питание магнитный пускатель KM2, который включает двигатель МЗ, Вращаясь, двигатель углубляет электроды в раствор. По мере заглубления электродов сопротивление жидкостного реостата уменьшается, и частота вращения двигателя возрастает. Осуществляется холодная обкатка с необходимой частотой вращения.
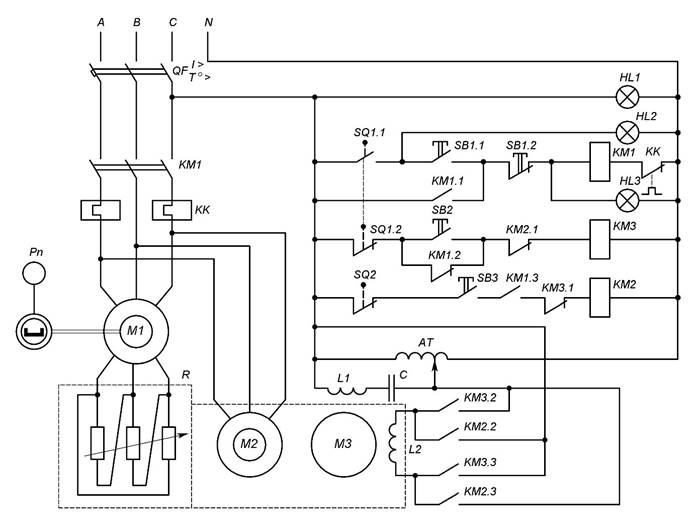
Рисунок 3 – Принципиальная электрическая схема управления стендом КИ 1363 ГОСНИТИ
Для отключения двигателя нажимают кнопку SB1.2. Двигатели M1, M2 отключаются, а электроды автоматически возвращаются в верхнее положение, так как блок-контактом KM1.2 замыкается цепь катушки контактора KMЗ, который изменяет направление тока в обмотке L2 однофазного двигателя. После того, как заведут автомобильный или тракторный двигатель, можно осуществлять горячую обкатку под нагрузкой и испытания. Для этого увеличивая подачу топлива, обеспечивают вращение подключенного к сети асинхронного двигателя M1 с частотой, выше частоты вращения магнитного поля. Осуществляется режим рекуперативного генераторного торможения. Тормозной момент регулируют изменением положения электродов в растворе. По мере углубления электродов тормозной момент растёт. Статор двигателя имеет балансирную подвеску с весовым механизмом, что позволяет измерять тормозной момент. Частота вращения измеряется электротахометром.
Промышленность поставляет три типоразмера стендов: КИ-1368В, в котором применен двигатель номинальной мощностью 40 кВт и синхронной частотой вращения 1000 мин-1; КИ-2139 Б, Рн=55 кВт, по=1500 мин-1; КИ-2П8А, Рн=90 кВт, по = 1500 мин-1.
Рабочая частота вращения в режиме генератора у первого стенда находится в пределах от 1100 до 2000 мин-1, второго и третьего – от 1600 до 3000 мин-1. Во всех этих стендах применяют двигатели специального исполнения АКБ, имеющие усиленное крепление обмотки ротора.
|
|
Видеоматериалы к занятию |
ТЕМА 2.11 СИСТЕМЫ ЦЕНТРАЛИЗОВАННОГО
КОНТРОЛЯ И АВТОМАТИЗИРОВАННОГО
УРОК №18. ПРИНЦИПЫ ЦЕНТРАЛИЗАЦИИ УПРАВЛЕНИЯ. СИСТЕМЫ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ
Под диспетчерской службой понимают централизованную форму оперативного управления с помощью технических средств связи, на основе сбора информации, ее обработки, осуществления оперативного контроля и регулирования производства.
Диспетчерская служба позволяет значительно повысить производительность управленческого труда, нормы управляемости и эффективность управления. Она включает диспетчерский персонал, комплекс технических средств управления (внутрифирменная радио – и телефонная связь, средства наглядного отображения информации), методы централизованного оперативного управления.
Система диспетчерского регулирования хода производства должна отвечать следующим требованиям:
– опираться на четкую организацию оперативного планирования, непосредственным продолжением которого она является;
– организовывать непрерывность контроля и наблюдения за ходом производства;
– осуществлять быстрое и четкое выполнение распоряжений руководства; – базироваться на ответственности и преемственности оперативного руководства.
Диспетчерская служба выполняет следующие функции.
Оперативный анализ – основа выполнения функций оперативного управления. В процессе анализа определяют степень выполнения плана, устанавливают причины отклонений, разрабатывают варианты решения проблем. Важен анализ конкретной проблемной ситуации. Анализируют выполнение плана работ, использование трудовых и технических ресурсов, материальных и трудовых затрат на производство и сбыт продукции, качество труда и продукции.
Оперативное целеполагание и планирование – это выработка целей и планирование развития производства и социальной сферы. В проблемной ситуации выбирают краткосрочные цели, призванные устранить возникшие проблемы. Оперативное планирование заключается в составлении месячных, декадных, сменно суточных заданий для коллектива организации, его подразделений и отдельного работника. Одна из функций планирования – самостоятельное решение работниками центрального диспетчерского пункта вопросов расстановки кадров и вариантов решения проблем, представляемых диспетчерскому совещанию.
Оперативная организация управления – распределение должностных полномочий по решению проблем, расстановка технических и трудовых ресурсов, создание нового краткосрочного организационного и функционального регламентирования, поддержание постоянной связи с помощью технических средств с руководителями, специалистами, рабочими для обеспечения устойчивости, гибкости и адаптивности механизма управления.
Оперативное регулирование хода выполнения плановых программ – обеспечивает взаимодействие коллективов различны) подразделений, надежную двустороннюю связь руководителей) специалистов и работников центрального диспетчерского пункта выявление срыва планов, отклонений от графика их выполнение и оперативное их устранение, корректировку планов, распространение распоряжений работников аппарата управления по ликвидации возникших проблем, активизацию деятельности трудовой коллективов.
Оперативный учёт и контроль – осуществляют на основ сбора, обработки и анализа информации, диспетчерской документации с помощью средств наглядного отображения информации Контроль осуществляется за выполнением оперативных планов текущими изменениями в организации труда и производства, реализацией распоряжений и указаний руководителей и специалистов, соблюдением режима использования технических и трудовых ресурсов, технологических приемов, проверкой технического состояния машинно-тракторного парка, качеством труда и продукции, социальными, санитарно-гигиеническими, эстетическими Я психологическими условиями производства.
В техническую подсистему диспетчерской службы входят: внутрифирменная автоматическая и диспетчерская телефонная связь, директорская связь, диспетчерская радиосвязь, вещательно-поисковая связь, устройства передачи технологической и другой информации (телеконтроль, телеизмерение, телесигнализация, фототелеграф, телетайп, промышленное телевидение), средства фиксирования информации (диктофон, магнитофон), измерительная и вычислительная техника, средства наглядного отображения информации.
Информационную подсистему диспетчерской службы представляют все виды информации, циркулирующей в системе, методы и средства работы с ней. Информационные потоки определяются функциями диспетчерской службы, уровнем организации системы управления, числом объектов диспетчеризации, объемом производства и т. д.
На центральном диспетчерском пункте составляют следующие документы: журналы диспетчера, диспетчерских совещаний, учета заявок от подразделений, учета производства и реализации продукции; оперативные графики выполнения основных работ; контрольные графики проведения технических уходов за автомобилями и другой техникой. Для улучшения восприятия основные виды оперативной информации могут быть отображены на стендах, планшетах, диаграммах.
Опыт работы сельскохозяйственных организаций повсеместно показал высокую эффективность диспетчеризации. При ней достигается более оперативное маневрирование трудовыми и материальными ресурсами, сокращаются простои техники и рабочей силы, особенно по организационным причинам, повышается культура управления производством в целом. Затраты на организацию диспетчерской службы окупаются, как правило, за 1–2 года. У руководителей и главных специалистов, как показали результаты исследований, сокращаются затраты времени на оперативное управление на 20–35 %, в связи с чем они могут лучше выполнять другие функции, прежде всего перспективного характера.
Благодаря диспетчерской службе другие функциональные и линейные службы управления получают возможность решать задачи, связанные с долгосрочными перспективами развития хозяйства, заниматься решением таких проблем, как совершенствование техники и технологии производства, организация труда, внедрение в производство новейших достижений науки и передового опыта.
Для решения вопросов оперативного управления аппарат диспетчерской службы должен обладать соответствующими знаниями. Деятельность диспетчера основывается на правильной оценке хода производства, умении предвидеть последствия отклонений от плана и наметить конкретные мероприятия, ведущие к устранению обнаруженных недостатков. Для этого диспетчерский аппарат помимо знания сельскохозяйственного производства должен обладать способностью к прогнозу и анализу, умением быстро ориентироваться в сложной, постоянно меняющейся производственной обстановке.
Структура диспетчерской службы определяется масштабами производства, его концентрацией, территориальным размещением, удаленностью производственных подразделений, содержанием и объемом выполняемых работ. В крупных сельскохозяйственных организациях оперативное управление осуществляется через центральный диспетчерский пункт и сеть диспетчерских пунктов при производственных подразделениях, в средних и небольших хозяйствах – через центральный диспетчерский пункт и диспетчерские посты в бригадах и фермах.
Под централизованным контролем понимается автоматический контроль параметров процесса с представлением результатов в специальном устройстве, установленном в центральном пункте. Централизованный контроль предназначен:
– для обнаружения отклонений контролируемых параметров от заданных значений со световой и звуковой сигнализацией и цифровой регистрацией этих отклонений;
– для измерения контролируемого параметра по запросу оператора и представления результатов измерения на указателе (стрелочном или цифровом);
– для вычисления технико-экономических показателей, характеризующих производственный процесс, с регистрацией результатов вычисления в накопителях информации или выдачей их в управляющую машину.
По результатам централизованного контроля человек-оператор принимает решение о целенаправленной корректировке хода производственного процесса. Решения исполняются или обслуживающим персоналом или оператором при помощи устройств централизованного управления или автоматически с использованием управляющих машин. Поскольку технологические процессы сельскохозяйственного производства сложны и многообразны, алгоритмы управления еще не сформулированы, а сами процессы протекают медленно и рассредоточены по большим территориям. Поэтому связь между системами централизованного контроля и устройствами централизованного управления в основном осуществляется через оператора-диспетчера. Оперативная информация о технологических процессах позволяет принимать необходимые решения по множеству вопросов и задач, а также оперативно управлять производством продукции. Под оперативным управлением понимается ежедневный контроль за деятельностью производства и обеспечение взаимосогласованности и ритмичности, непрерывности и оптимальности работы всех звеньев прогрессивной технологии производства продукции. Общая характерная особенность построения системы централизованного контроля (СЦК) – многократное использование одних и тех же узлов для обработки однородных контролируемых сигналов. В типовой функциональной схеме системы оперативного централизованного контроля и сигнализации параметры технологического процесса измеряются первичными преобразователями и в форме электрических сигналов подаются через переключатель в узел нормирования. В этом узле сигналы преобразуются в определенную форму, удобную для их сравнения с заданным значением в блоке обнаружения отклонения и для выдачи на цифровой преобразователь. С цифрового преобразователя информация передается на обработку в вычислительное устройство, а главные итоговые результаты изображаются на цифровом индикаторе или дисплее. Вычислительное устройство одновременно является оперативной памятью и выдает информацию по требованию программного устройства. По свойствам отображения контролируемые параметры можно разделить на четыре группы:
1) постоянно отображающиеся у оператора;
2) отображающиеся через определенные интервалы времени;
3) отображающиеся по вызову оператора;
4) отображающиеся при возникновении предельных отклонений параметров от заданных.
Все основные средства отображения информации могут располагаться на приборных щитах и пультах в виде мнемосхем, показывающих и регистрирующих приборов, световых и звуковых сигнализаторов. На центральном пункте контроля оператор следит за работой процесса по специальному компьютерному монитору. Таким образом, СЦК выполняют следующие функции:
– регистрируют главные параметры технологического процесса;
– сигнализируют об аварийных изменениях (отклонениях) параметров;
– непрерывно или с заданной периодичностью измеряют ряд параметров, и проверяют их соответствие заданным значениям;
– измеряют второстепенные параметры по вызову оператора. Современные СЦК обеспечивают также оперативную связь между центральным пунктом управления и технологическими установками, позволяют оператору-диспетчеру дистанционно изменять задания локальным системам управления. Перед созданием СЦК и САУ ТП в первую очередь должна быть выявлена технико-экономическая целесообразность их использования. Для наблюдения за поведением животных и птицы на фермах промышленного типа и птицефабриках целесообразно использовать телевидение.
УРОК №19. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ (АСУ ТП)
По мере развития технологии и техники управления централизованный контроль перерастает в автоматизированные системы управления технологическими процессами (АСУТП). Автоматизированные системы управления технологическими процессами (АСУТП) – это человекомашинные системы, предназначенные для контроля режимов работы, сбора и обработки информации о протекании технологических процессов локальных производств (отдельных цехов, животноводческих и птицеводческих ферм, хранилищ, фермерских хозяйств и др.).
Главной задачей большинства АСУТП является получение определенных технико-экономических результатов:
– повышение производительности труда;
– снижение затрат живого труда и трудоемкости производства;
– экономия энергетических ресурсов, вспомогательных материалов, тары и т. п.;
– обеспечение безопасности функционирования объекта;
– повышение или стабилизация качества выпускаемой продукции или обеспечение заданных значений параметров готовых изделий;
– достижение оптимальной загрузки оборудования;
– оптимизация режимов работы технологического оборудования.
АСУТП отличаются от СЦК значительно более широким набором функций управления. Кроме централизованного контроля, АСУТП дополнительно выполняет следующие функции:
– рассчитывает и регистрирует текущие и итоговые технологические и экономические показатели;
– определяет оптимальные параметры технологического режима;
– формирует и реализует сигналы управления, обеспечивающие ведение оптимального режима;
– корректирует алгоритмы функционирования при изменениях условий в технологическом процессе.
В комплекс технических средств АСУТП входят информационно-вычислительные устройства, предназначенные для сбора, обработки и выдачи хозяйственно-экономических информаций, а также каналы связи с системой вычислительных центров. АСУ ТП в сочетании с ЭВМ помогает диспетчеру и руководителю предприятия оперативно находить решения по оптимальному управлению производственным процессом, опираясь на показатели отдельных технологических операций. Перечисленные функции могут быть выполнены только при наличии ЭВМ. Следовательно, использование ЭВМ для управления технологическим процессом – одна из основных особенностей АСУ ТП. ЭВМ может работать в четырех режимах, а именно:
1) сбора и обработки данных;
2) советчика оператора; 3) супервизорного управления;
4) непосредственного управления.
В режиме сбора и обработки информационные параметры технологического процесса преобразуются в цифровую форму и вводятся в ЭВМ. После обработки в ЭВМ информация поступает на устройства отображения технологических параметров. Статистическая информация и ряд технологических показателей фиксируются в памяти ЭВМ и выводятся на печать для оформления документального отчета о технологическом процессе. Работа ЭВМ в режиме сбора и обработки информации используется в тех случаях, когда из-за сложности технологического процесса функции по определению и формированию управляющих воздействий должен выполнять оператор. В режиме советчика ЭВМ, кроме сбора и обработки информации, выполняет следующие функции: рассчитывает оптимальные параметры технологического процесса, определяет значение уставок локальных систем автоматического управления и формирует закон управляющих воздействий. Данные с ЭВМ поступают через средства отображения информации в форме рекомендаций оператору. Оператор на основе этих данных и собственного опыта управления принимает соответствующие решения о корректировке хода технологического процесса. ЭВМ в режиме советчика используют в технологических процессах, в которых необходим осторожный подход к решениям, выработанным формальными математическими методами. К таким процессам можно отнести сложные биологические режимы в животноводстве и полеводстве. В режиме супервизорного управления АСУТП с ЭВМ представляет собой двухуровневую иерархическую систему. Нижний уровень, непосредственно связанный с технологическим процессом, образуют локальные подсистемы управления с отдельными технологическими параметрами. На верхнем (втором) уровне управления используется ЭВМ, основной функцией которой является определение оптимального технологического режима и вычисление на его основе настроек локальных подсистем. Супервизорный режим позволяет осуществлять автоматическое управление технологическим процессом. За оператором остаются функции наблюдателя за процессом и в случае необходимости корректировка цели управления. В режиме непосредственного управления ЭВМ рассчитывают управляющие воздействия и передают их непосредственно на исполнительные органы. В таких АСУТП локальные САУ подсистемы не требуются. За оператором остаются те же функции, что и при супервизорном управлении. При управлении сложными технологическими объектами, например крупными комплексами, рекомендуется использовать многоуровневые АСУТП. Они состоят из отдельных подсистем, между которыми установлены отношения соподчинения. Каждая подсистема имеет ЭВМ, работающую в одном из описанных выше режимов. Для таких АСУТП характерно, что по мере продвижения от нижних уровней к верхним информация о состоянии технологического объекта обобщается, а управляющие воздействия формируются для более крупных частей технологического процесса.
2. Централизованный контроль и управление в сельскохозяйственном производстве
На современном этапе системы централизованного контроля (СЦК) и АСУТП применяются в животноводстве, птицеводстве, в теплицах и полеводстве.
На фермах промышленного типа осуществляется переход от автоматизации отдельных установок к комплексной автоматизации поточных линий и цехов. Комплексная автоматизация совместно с АСУТП позволяет оптимизировать работу животноводческих ферм и повышать эффективность и продуктивность производства. Это достигается благодаря более точному нормированию и раздаче корма животным, своевременному удалению продуктов жизнедеятельности, созданию оптимального микроклимата, учету продукции и оперативной информации.
В полеводстве и садоводстве до сих пор основной информацией, которая используется при проведении различных оценок сельскохозяйственного производства, в том числе, состояния посевов и многолетних насаждений являются результаты отчетов производителей с/х продукции и информация наземных выборочных измерений, которые несколько раз в сезон вегетации осуществляет специальная служба при министерстве АПК. На основании полевых обследований состояния посевов составляются прогнозы урожайности сельскохозяйственных культур. Посевы обследуются на ограниченном количестве полей, а их результаты экстраполируются на территорию всего региона. В результате качество оценки состояния посевов в общем по региону является недостаточно высоким, а получение информации – недостаточно оперативным.
Бурное развитие в последние десятилетия дистанционных, в первую очередь спутниковых, методов наблюдений открыло новые возможности для организации оперативного и объективного мониторинга посевов сельскохозяйственных культур.
В настоящее время работает достаточно большое количество спутников, на борту которых установлена разнообразная аппаратура, которая достаточно эффективно может использоваться для мониторинга сельскохозяйственных земель и состояния посевов. В настоящее время спутниковые системы позволяют проводить достаточно частые наблюдения (раз в день или раз в несколько дней) за динамикой развития растений и их реакцией на воздействие неблагоприятных факторов.
Особое значение при построении систем дистанционного мониторинга является возможность организации полностью автоматизированной обработки спутниковых данных. Она позволяет получать максимально объективную информацию, независящую от субъективного мнения отдельных специалистов.
Применение спутниковых систем позволяют осуществлять мониторинг урожайности. Разработаны системы картирования (картографирования) урожайности на основе GPS-технологий, которые позволяют дополнительно рисовать онлайн карты урожайности культуры, влажности почвы, состояния полей.
Система картирования урожайности – аппаратно-программный комплекс, устанавливающийся на уборочную технику, позволяющий определять и фиксировать количество собранной сельскохозяйственной продукции за короткие промежутки времени. На основе карт урожайности можно в соответствующей ГИС-программе создать карты экономической эффективности каждого поля с расчетом прибылей или убытков при разных ценах на продукцию, колебания которых подвержены условиям рынка. Это позволит сразу после уборки урожая просчитать разные сценарии сбыта продукции, сопоставить затраты и прибыль. При уборке зерна с использованием датчика урожайности, наряду с основными данными (урожайность, влажность, сбор продукции, производительность и т.д.), создается карта рельефа поля. На этой карте наглядно видно развитие эрозионных процессов на пашне. Применение спутниковой навигации позволяет осуществлять так называемое дифференцированное внесение минеральных удобрений. При этом удобрения вносят не одинаково по всей площади поля, а осуществляют корректировку дозы внесения в зависимости от обеспеченности каждого элементарного участка и потребности конкретной культуры. Для этого предварительно проводят агрохимическое обследование и создаются карты обеспеченности почвы элементами питания. На карту наносится распределение элементов питания по площади поля, их неоднородное количественное содержание с привязкой к пространственным координатам. Также о наличии элементов питания на том или ином участке поля можно судить из карт урожайности предыдущей убранной культуры. Систему спутниковой навигации используют на полях фирмы «КВИНТ» для посадки саженцев. Применение централизованного контроля и управления позволяет существенно повысить эффективность сельскохозяйственного производства:
– сократить объемы обслуживания многочисленных разобщенных установок за счёт ускорения поиска мест повреждения и принятия необходимых мер по их устранению;
– повысить надежность работы оборудования и его эффективность;
– вести более точный учет расхода кормов, минеральных удобрений, топливо-смазочных материалов;
– осуществлять контроль трудовых затрат и полученной продукции;
– отслеживать работу транспортных средств и сельскохозяйственной техники;
– улучшить эффективность системы сбора и обработки информации;
– обеспечить непосредственную связь административно-управленческого аппарата и работников на местах.
Централизованное управление совместно с диспетчерскими средствами связи, вычислительной техникой и устройствами отображения информации образует автоматизированную систему управления производством (АСУП). По определению и назначению АСУП является человеко-машинной системой, предназначенной для решения организационно-экономических задач с целью получения максимума продукции при минимуме материально-технических и трудовых затрат. Основное отличие АСУП от АСУ ТП и САУ – необходимость присутствия человеческого фактора в системе. АСУП, являясь новым шагом в теории и практике управления, требует использования и разработки новых принципов и методов управления, моделирования, математического обеспечения и технического оснащения. При наличии технических средств связи, информационно-вычислительных центров для обработки информации и каналов оперативного управления на высшей (четвертой) ступени образуется так называемая отраслевая автоматизированная система управления производством (ОАСУП). Внедрение АСУП, а затем ОАСУП поднимает управление производственно-хозяйственной деятельностью на новую, более высокую качественную ступень.
Диспетчерский пункт состоит из следующих помещений (или части из них): диспетчерская со щитами, пультами и столом с компьютером для диспетчера, аппаратная со штативами, реле, выпрямителями, зарядно-разрядными щитами, аккумуляторная, контрольно-ремонтная мастерская с оборудованием и персоналом, бытовые помещения.
Диспетчерские пункты должны быть оснащены следующими средствами связи и управления (либо частью из них):
а) избирательной (селекторной) телефонной или радиотелефонной связью;
б) устройствами для телеизмерения показателей работы сооружений и оборудования;
в) дистанционной сигнализацией и средствами контроля за работой сооружений и обору-
дования;
г) телемеханическими средствами управления агрегатами, механизмами и запорно-регули-
рующими устройствами;
д) компьютерной техникой с выводом на дисплей технологических схем, схем автоматиза-
ции и телеуправления, показателей работы систем, сооружений и оборудования.
Основной источник:
Бородин, И. Ф. Автоматизация технологических процессов и системы автоматического управления: учебник для среднего профессионального образования / И. Ф. Бородин, С. А. Андреев. – 2-е изд., испр. и доп. – Москва: Издательство Юрайт, 2023. – 386 с. – (Профессиональное образование). – ISBN 978-5-534-08655-3. – Текст: электронный // Образовательная платформа Юрайт [сайт]. – URL: https://urait.ru/bcode/514330
Дополнительные источники:
1. Молдабаева, М. Н. Контрольно-измерительные приборы и основы автоматики: учеб. пособие /
М. Н. Молдабаева. – Москва; Вологда: Инфра-Инженерия, 2019. – 332 с. – ISBN 978-5-9729-0327-6. – Текст: электронный. – URL: https://znanium.com/catalog/product/1048719
2. Шишмарёв, В. Ю. Автоматика: учебник для среднего профессионального образования / В. Ю. Шишмарёв. – 2-е изд., испр. и доп. – Москва: Издательство Юрайт, 2022. – 280 с. – (Профессиональное образование). – ISBN 978-5-534-09343-8. – Текст: электронный // Образовательная платформа Юрайт [сайт]. – URL: https://urait.ru/bcode/493310
3. Щагин, А. В. Основы автоматизации технологических процессов: учебное пособие для среднего профессионального образования / А. В. Щагин, В. И. Демкин, В. Ю. Кононов, А. Б. Кабанова. – Москва: Издательство Юрайт, 2022. – 163 с. – (Профессиональное образование). – ISBN 978-5-534-03848-4. –
Текст: электронный // Образовательная платформа Юрайт [сайт]. – URL: https://urait.ru/bcode/488637
Справочник:
Шеховцов, В. П. Справочное пособие по электрооборудованию и электроснабжению: учебное пособие / В.П. Шеховцов. – 3-е изд. – Москва: ИНФРА-М, 2023. – 136 с. – (Среднее профессиональное образова-
ние). – ISBN 978-5-16-013424-6. – Текст: электронный. – URL: https://znanium.com/catalog/product/1903149
Интернет-ресурсы:
1. Информационный портал «Ani-studio» [Электронный ресурс] / Функциональные схемы систем автоматизации: Сайт Режим доступа: http://ani-studio.narod.ru/BOX/Flash/Study/Automation/HTMLThemes/Theme7.htm
2. Информационный портал «Electric-Blogger.ru» [Электронный ресурс] / Принципиальные схемы. Правила выполнения: Сайт Режим доступа: https://electric-blogger.ru/schemy/principialnye-sxemy-pravilavypolneniya.html
3. Информационный портал «Школа для электрика» [Электронный ресурс] / Условные графические обозначения на электрических принципиальных схемах: Сайт Режим доступа:
http://electricalschool.info/main/electroshemy/1373-uslovnye-oboznachenija-na.html
4. Информационный портал «МойДокс.ру» [Электронный ресурс] / Монтажные зоны щитов и пультов. Расположение приборов и аппаратуры на фасадных панелях щитов и пультов: Сайт Режим доступа: https://mydocx.ru/12-10529.html
5. Информационный портал «Студопедия» [Электронный ресурс] / Выбор щитов и пультов: Сайт
Режим доступа: https://studopedia.su/10_114027_vibor-shchitov-i-pultov.html
6. Информационный портал «Studbooks.net» [Электронный ресурс] / Выбор тиристоров по току:
Сайт Режим доступа: https://studbooks.net/2182899/matematika_himiya_fizika/vybor_tiristorov_toku
7. Информационный портал «Studme.org» [Электронный ресурс] / Автоматизация управления вентиляцией: Сайт Режим доступа:
https://studme.org/288627/tehnika/avtomatizatsiya_upravleniya_ventilyatsiey_ptichnikov
8. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация установок микроклимата в животноводческих и птицеводческих помещениях: Сайт Режим доступа: https://studopedia.ru/3_68134_lektsiya---avtomatizatsiya-ustanovok-mikroklimata-v-zhivotnovodcheskih-iptitsevodcheskih-pomeshcheniyah.html
9. Информационный портал «StudRef.com» [Электронный ресурс] / Автоматизация раздачи кор-
мов на свиноводческих фермах и комплексах: Сайт Режим доступа:
https://studref.com/362939/tehnika/avtomatizatsiya_razdachi_kormov_svinovodcheskih_fermah_kompleksah
10. Информационный портал «Studme.org» [Электронный ресурс] / Электромобильные установки с централизованным электропитанием: Сайт Режим доступа:
https://studme.org/265220/tehnika/elektromobilnye_ustanovki_tsentralizovannym_elektropitaniem
11. Информационный портал «Лекция» [Электронный ресурс] / Автоматизация кормления и поения животных: Сайт Режим доступа: https://lektsia.com/4xea.html
12. Информационный портал «Studbooks.net» [Электронный ресурс] / Электропривод по уборке навоза из животноводческих помещений: Сайт Режим доступа: https://studbooks.net/1817995/matematika_himiya_fizika/elektroprivod_uborke_navoza_zhivotnovodcheskih_ pomescheniy
13. Информационный портал «StudRef.com» [Электронный ресурс] / Автоматизация удаления навоза и помета: Сайт Режим доступа: https://studref.com/362940/tehnika/avtomatizatsiya_udaleniya_navoza_pometa
14. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация машинного доения коров: Сайт Режим доступа: https://studopedia.ru/3_68132_lektsiya---avtomatizatsiya-tp-vzhivotnovodstve.html
15. Информационный портал «АгроПост» [Электронный ресурс] / Системы роботизации доения коров: Сайт Режим доступа: http://agropost.ru/oborudovanie-zhivotnovodstva/sistemy-robotizatsii-doeniyavybor-doilnoy-ustanov.html
16. Информационный портал «Cyberpedia» [Электронный ресурс] / Пастеризационно-охладительная установка ОПФ-1: Сайт Режим доступа: https://cyberpedia.su/1x946f.html
17. Информационный портал «Агроархив» [Электронный ресурс] / Комплекты оборудования для напольного выращивания и содержания птиц: Сайт Режим доступа: https://agro-
archive.ru/pticevodstvo/1392-komplekty-oborudovaniya-dlya-napolnogo-vyraschivaniya-i-soderzhaniyaptic.html
18. Информационный портал «Studfile.net» [Электронный ресурс] / Автоматизация поточных линий раздачи кормов в птичнике: Сайт Режим доступа: https://studfile.net/preview/5441392/page:6/
19. Информационный портал «ЭлектроТехИнфо» [Электронный ресурс] / Электрообогрев животноводческого и птицеводческого хозяйства: Сайт Режим доступа: https://eti.su/articles/elektricheskiemashini/elektricheskie-mashini_1470.html
20. Научная электронная библиотека «КиберЛенинка» [Электронный ресурс] / Инновационная автоматизированная технология переработки куриного помета и устройство для ее реализации: Сайт Режим доступа: https://cyberleninka.ru/article/n/innovatsionnaya-avtomatizirovannaya-tehnologiya-pererabotkikurinogo-pometa-i-ustroystvo-dlya-ee-realizatsii
21. Информационный портал «StudRef.com» [Электронный ресурс] / Автоматизация поточных линий сбора яиц на птицефабриках: Сайт Режим доступа:
https://studref.com/362942/tehnika/avtomatizatsiya_potochnyh_liniy_sbora_ptitsefabrikah
22. Информационный портал «Агросервер» [Электронный ресурс] / Автоматические линии убоя птицы: Сайт Режим доступа: https://agroserver.ru/articles/6237.htm
23. Информационный портал «Лекции.Ком» [Электронный ресурс] / Автоматизация дозирования корма и учета продукции: Сайт Режим доступа: https://lektsii.com/1-88245.html
24. Информационный портал «Школа для электрика» [Электронный ресурс] / Устройство поточ-
ной линии переработки корнеклубнеплодов: Сайт Режим доступа:
http://electricalschool.info/main/electroshemy/1665-jelektricheskie-skhemy-vkhodjashhie-v.html
25. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация гидромелиоративных систем: Сайт Режим доступа: https://studopedia.ru/3_68136_avtomatizatsiya-bashennihvodokachek.html
26. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация технологических процессов в полеводстве: Сайт Режим доступа: https://studopedia.ru/3_68127_lektsiya--avtomatizatsiya-tp-v-polevodstve.html
27. Информационный портал «Вунивере.ру» [Электронный ресурс] / Система автоматического управления зерноочистительным агрегатом типа ЗАВ-20: Сайт Режим доступа: https://vunivere.ru/work29881
28. Информационный портал «Лекции.Ком» [Электронный ресурс] / Автоматизация теплиц для выращивания грибов: Сайт Режим доступа: https://lektsii.com/1-87236.html
29. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация хранилищ сельхозпродукции: Сайт Режим доступа: https://studopedia.ru/3_68130_lektsiya---avtomatizatsiya.html
30. Сайт производственной компании «Kontel.ru» [Электронный ресурс] / Автоматика для водогрейных котлов «малой» мощности: Сайт Режим доступа: https://kontel.ru/download/Автоматизация%20котлов_информационный_листок.pdf
31. Информационный портал «Extxe.com. Современные технологии производства» [Электронный ресурс] / Системы автоматизации отопительных котлов: Сайт Режим доступа: https://extxe.com/22930/sistemy-avtomatizacii-otopitelnyh-kotlov/
32. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация систем энергообеспечения сельского хозяйства: Сайт Режим доступа: https://studopedia.ru/3_68137_lektsiya--avtomatizatsiya-sistem-energoobespecheniya-sh.html
33. Информационный портал «Studbooks.net» [Электронный ресурс] / Автоматизация вспомогательного оборудования котельной: Сайт Режим доступа:
https://studbooks.net/2040705/matematika_himiya_fizika/avtomatizatsiya_vspomogatelnogo_oborudovaniya_k otelnoy
34. Информационный портал «Архив электронных ресурсов СФУ» [Электронный ресурс] / Автоматизация электрокотельной: Сайт Режим доступа: http://elib.sfu-kras.ru/handle/2311/140047
35. Информационный портал «Лекции.Нет» [Электронный ресурс] / Автоматизация системы электроснабжения сельского хозяйства: Сайт Режим доступа: https://lektsii.net/1-157871.html
36. Информационный портал «Строй-справка.ру» [Электронный ресурс] / Автоматизация работы паровых и водогрейных котлов на газовом топливе: Сайт Режим доступа: http://stroy-
spravka.ru/article/avtomatizatsiya-raboty-parovykh-i-vodogreinykh-kotlov-na-gazovom-toplive
37. Информационный сервисный центр «Эксплуатация холодильника» [Электронный ресурс] / Электрическая схема холодильника: Сайт Режим доступа: https://expluataciyaholodilnika.ru/holodilniki/chasti-holodilnika/shema-holodilnika/
38. Информационный портал «Студопедия» [Электронный ресурс] / Автоматизация системы технического сервиса в СХ: Сайт Режим доступа: https://studopedia.ru/3_68138_lektsiya---avtomatizatsiyasistemi-tehnicheskogo-servisa-v-sh.html
39. Информационный портал «Студопедия» [Электронный ресурс] / Диспетчерская служба и ее функции: Сайт Режим доступа: https://studopedia.ru/5_114562_dispetcherskaya-sluzhba-i-ee-funktsii.html
40. Образовательный портал «Электронный университет ПГУ» [Электронный ресурс] / Системы централизованного контроля и автоматизированного управления: Сайт Режим доступа: http://moodle.spsu.ru/pluginfile.php/59242/mod_resource/content/1/Системы%20централиз%20контроля%20и%20автоматиз%20управления.pdf
41. Информационный портал «Студопедия» [Электронный ресурс] / Понятие об автоматизированных системах управления технологическим процессом (АСУТП): Сайт Режим доступа: https://studopedia.ru/2_120697_ponyatie-ob-avtomatizirovannih-sistemah-upravleniya-tehnologicheskimprotsessom-asutp.html



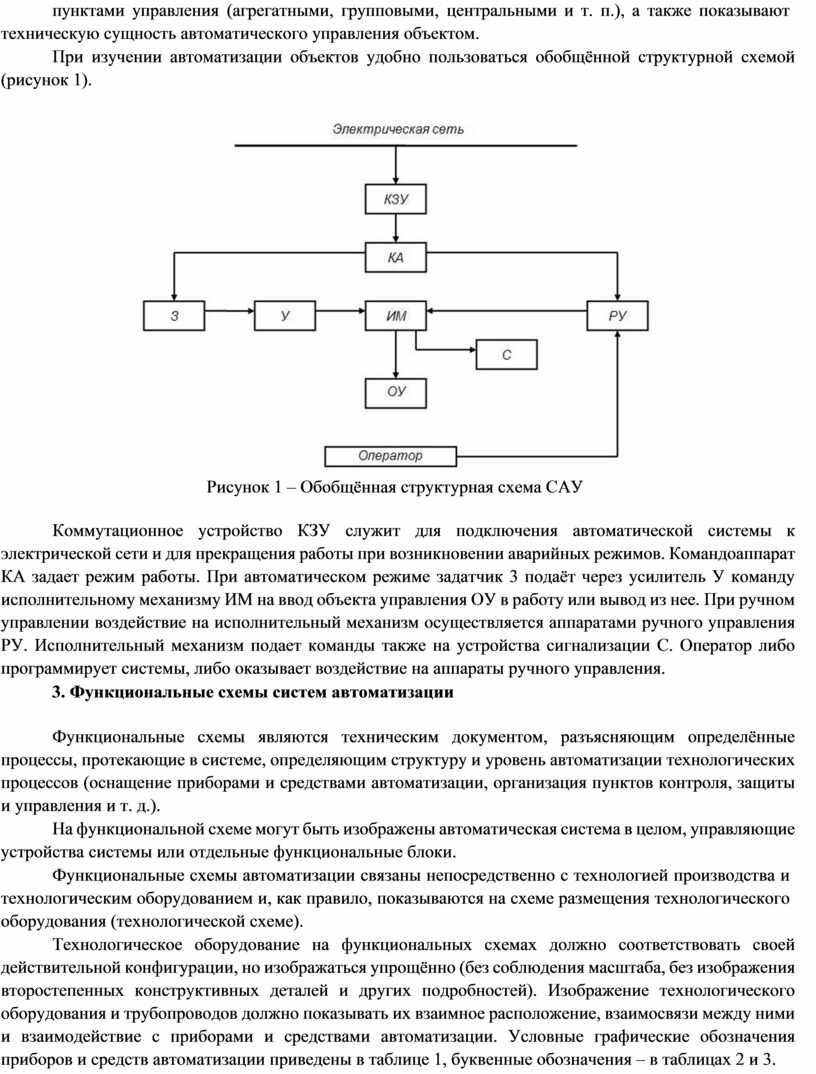
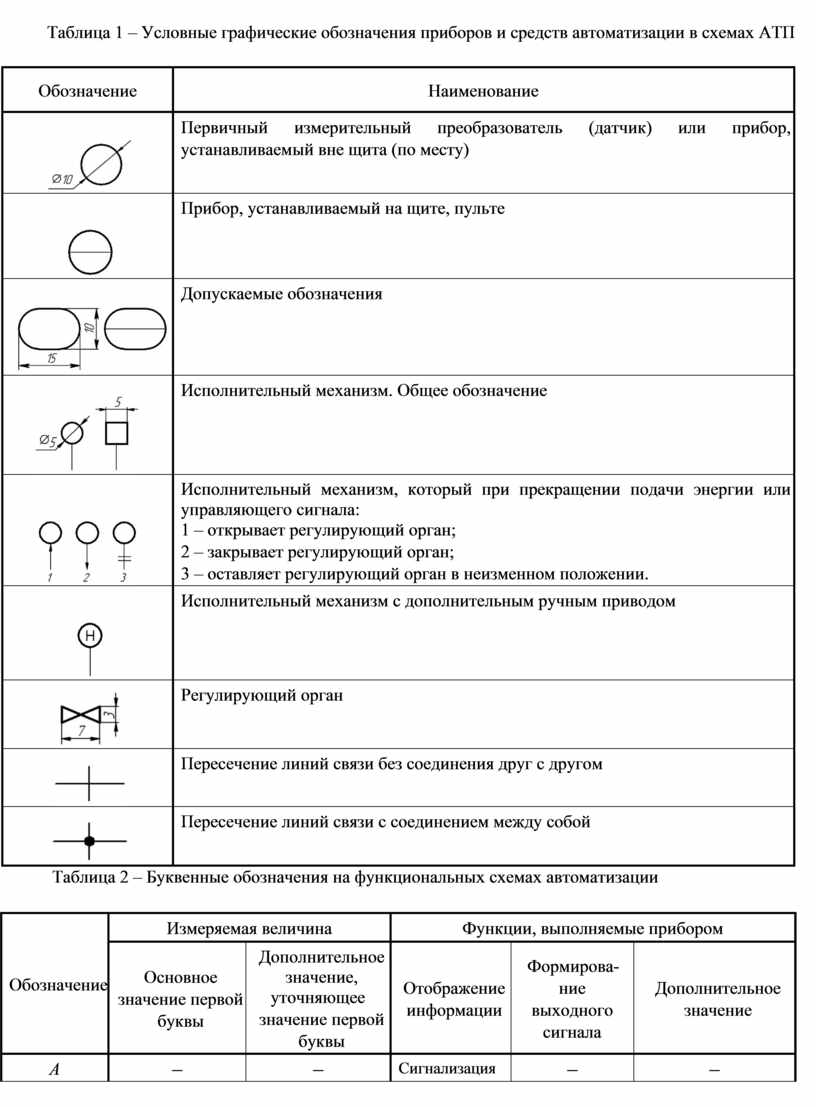

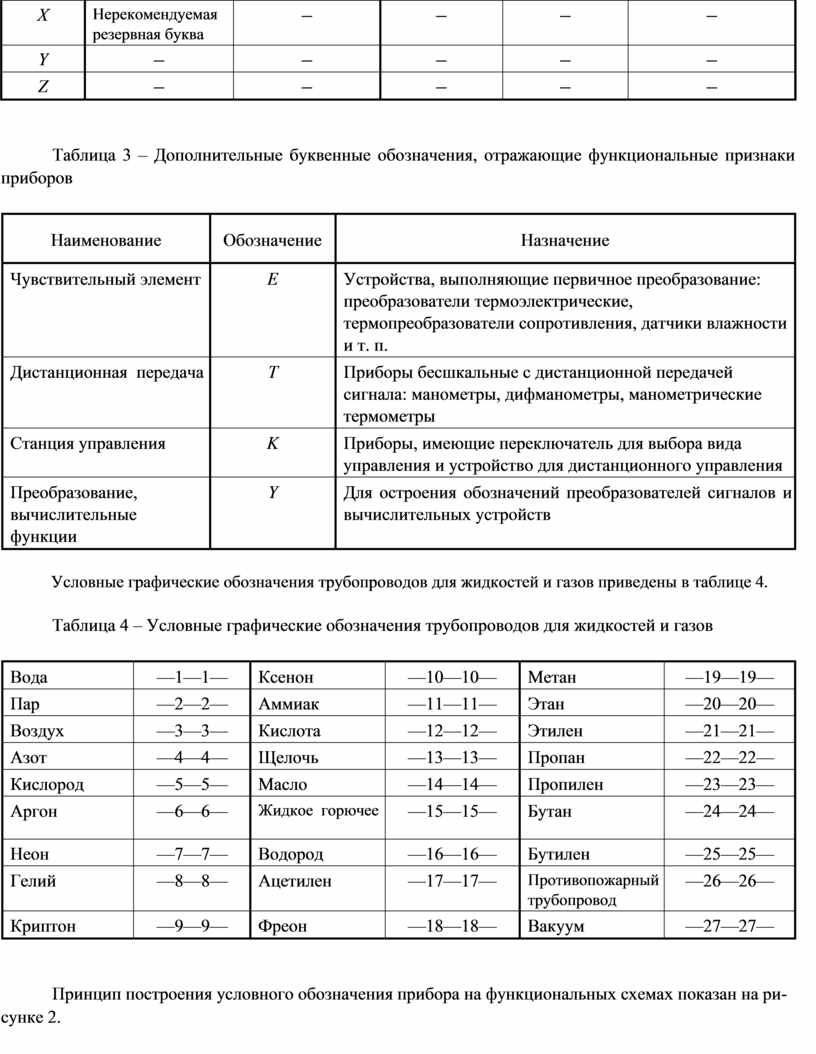
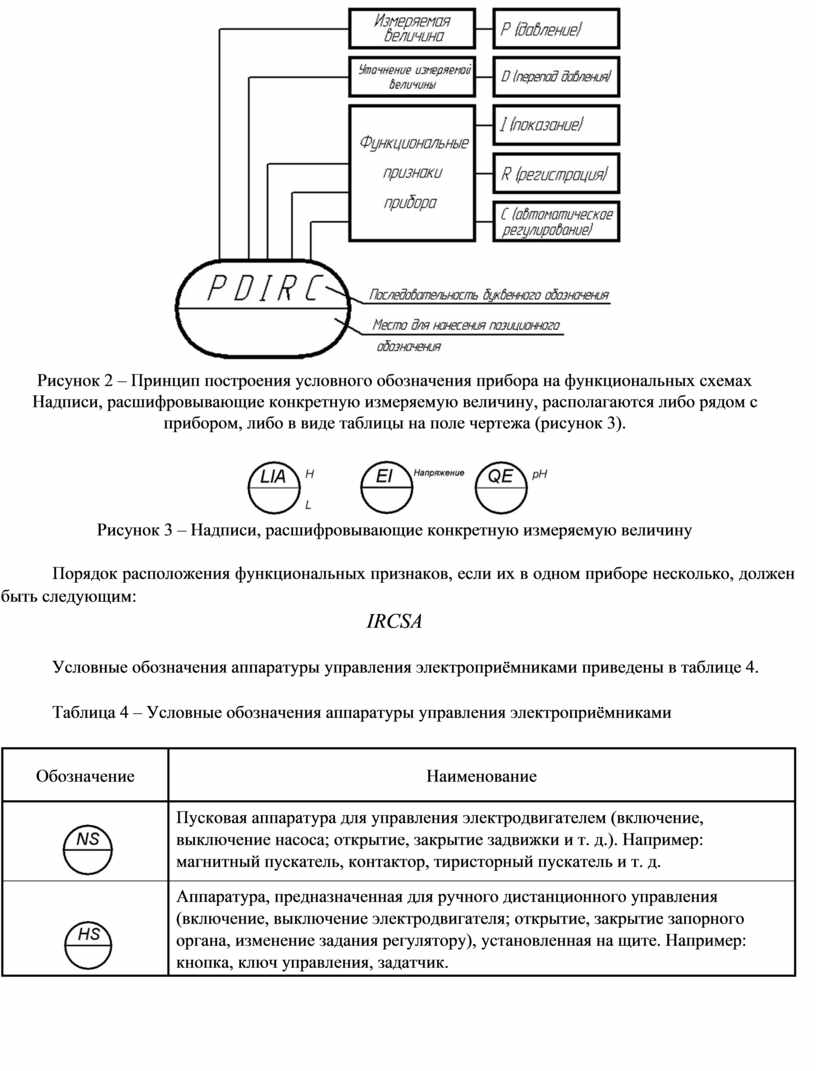
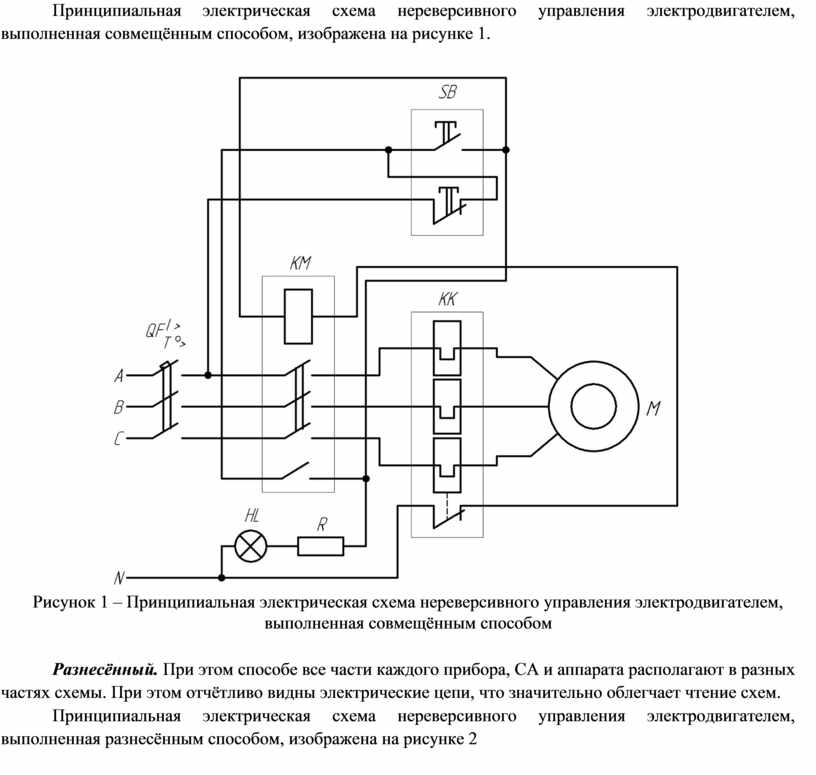
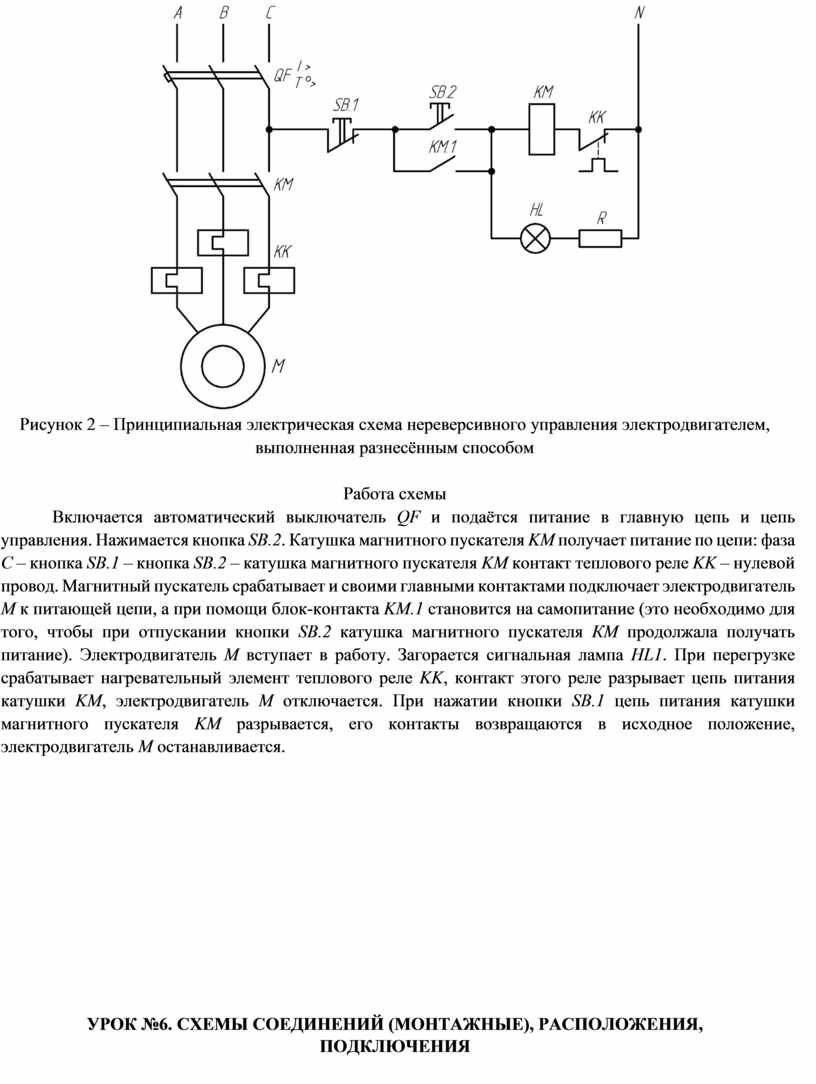
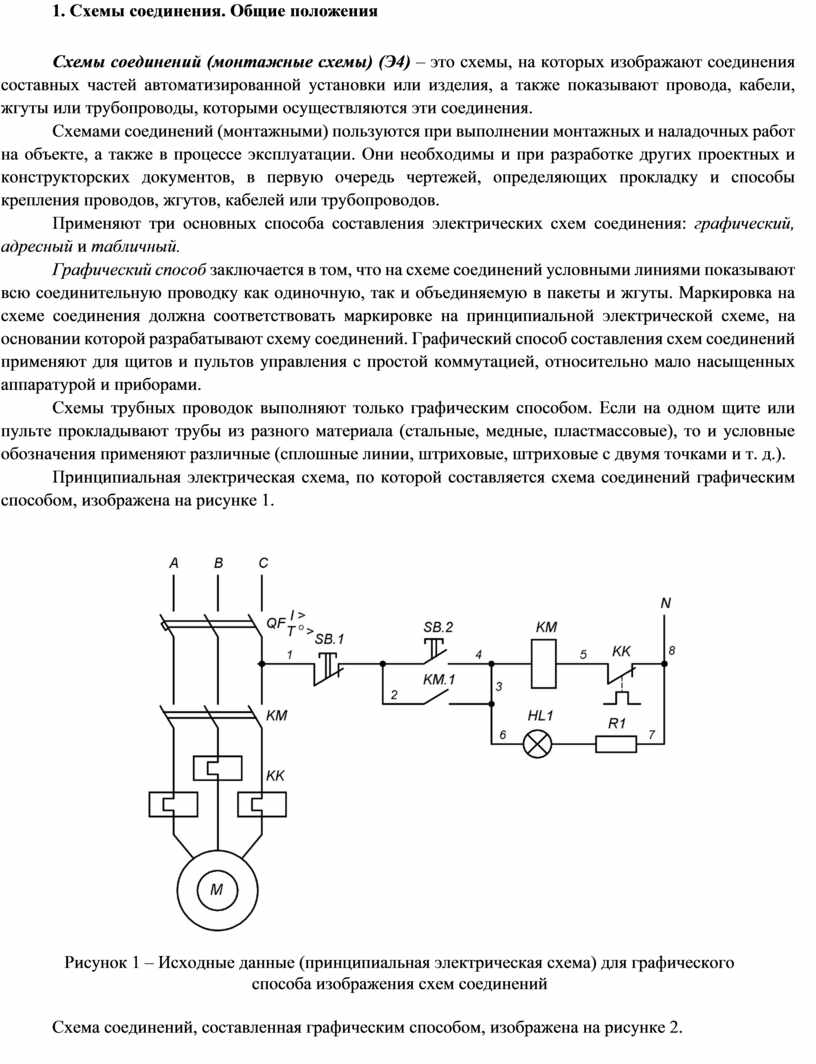
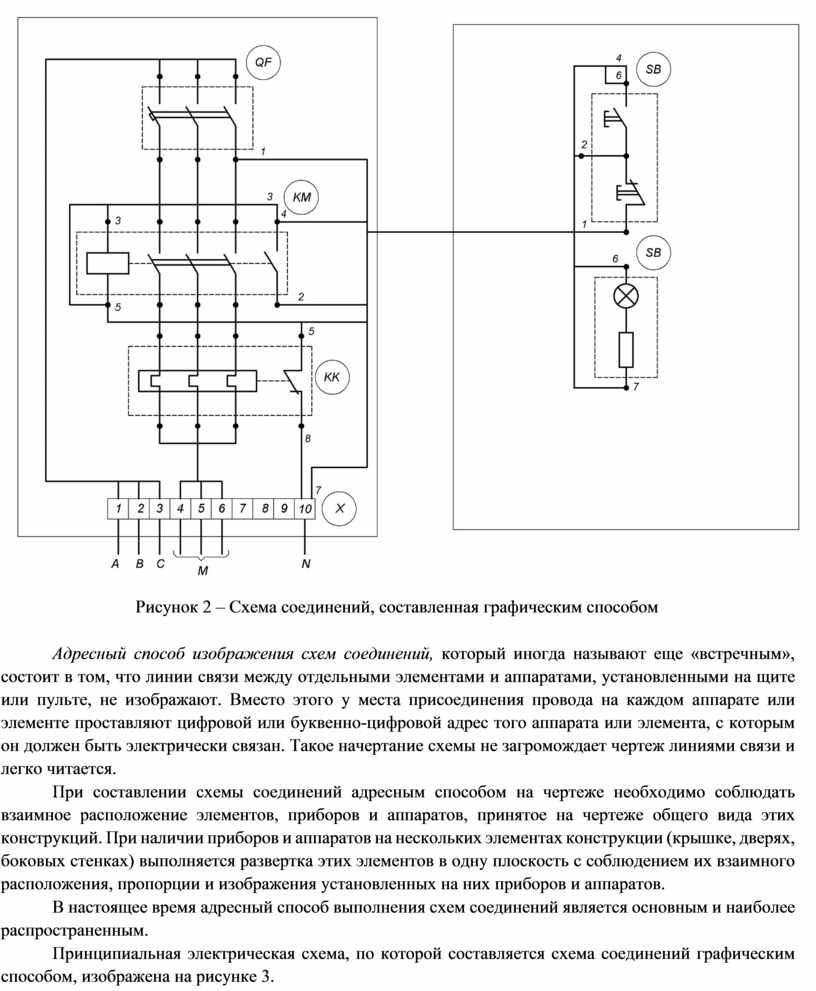
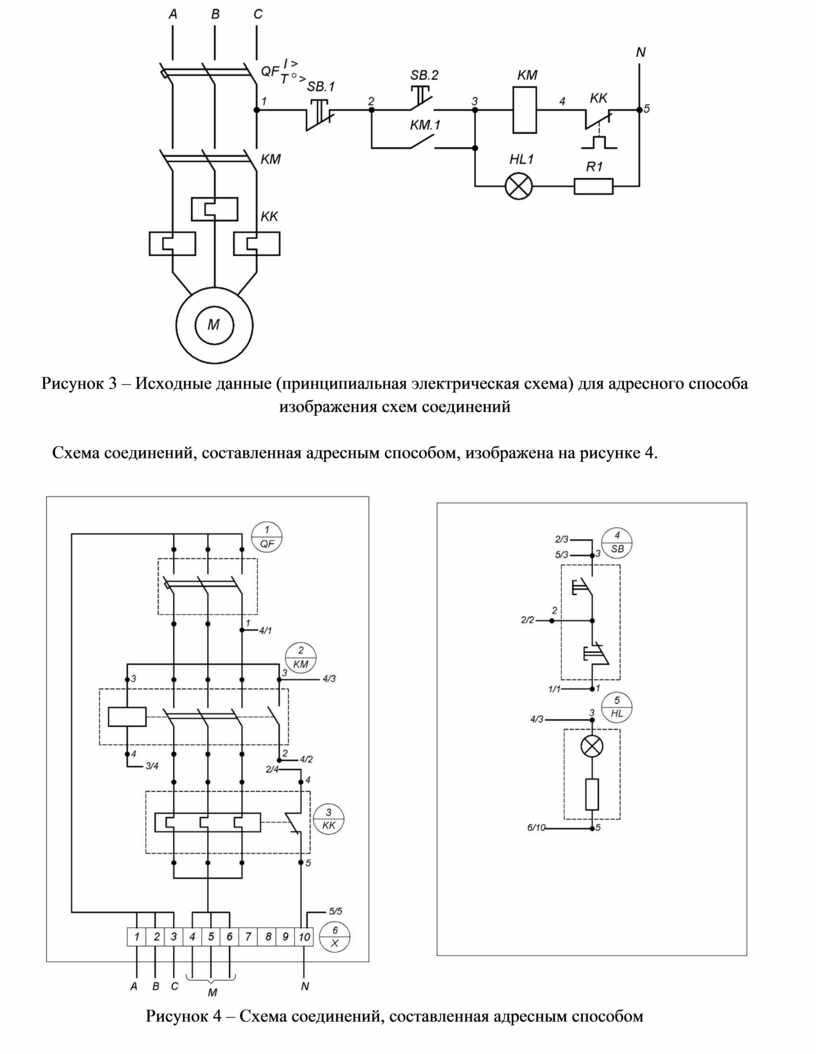

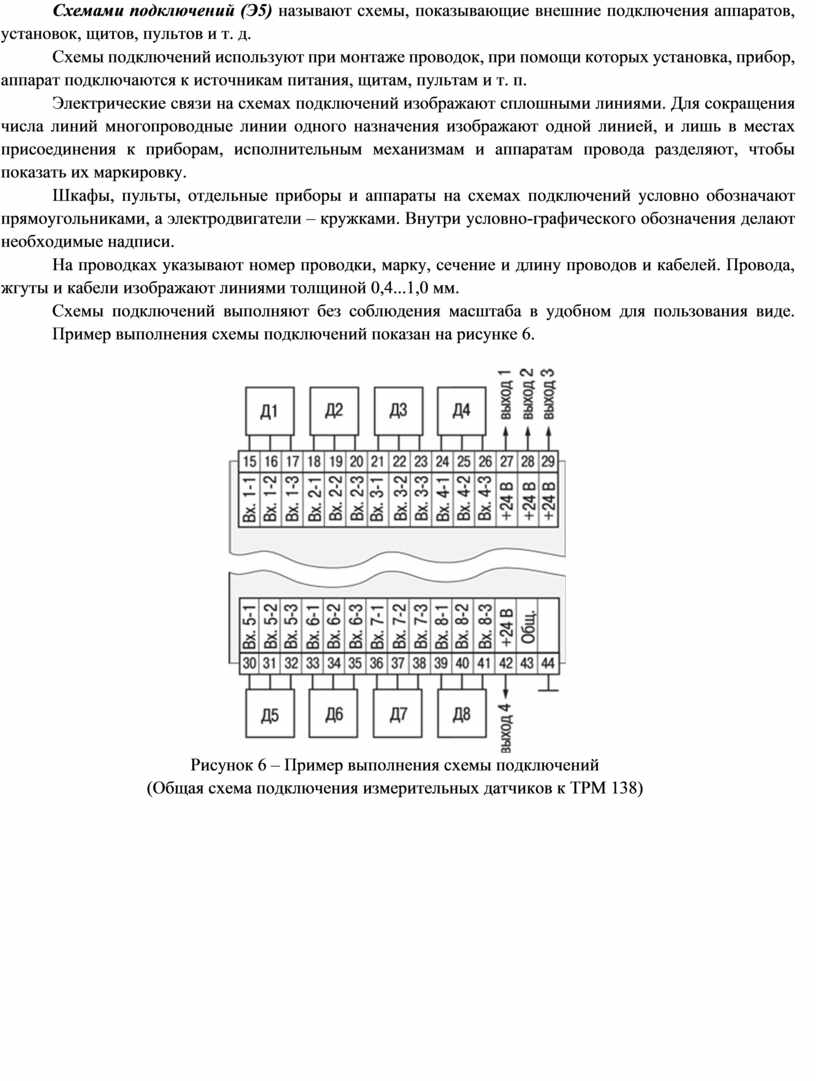


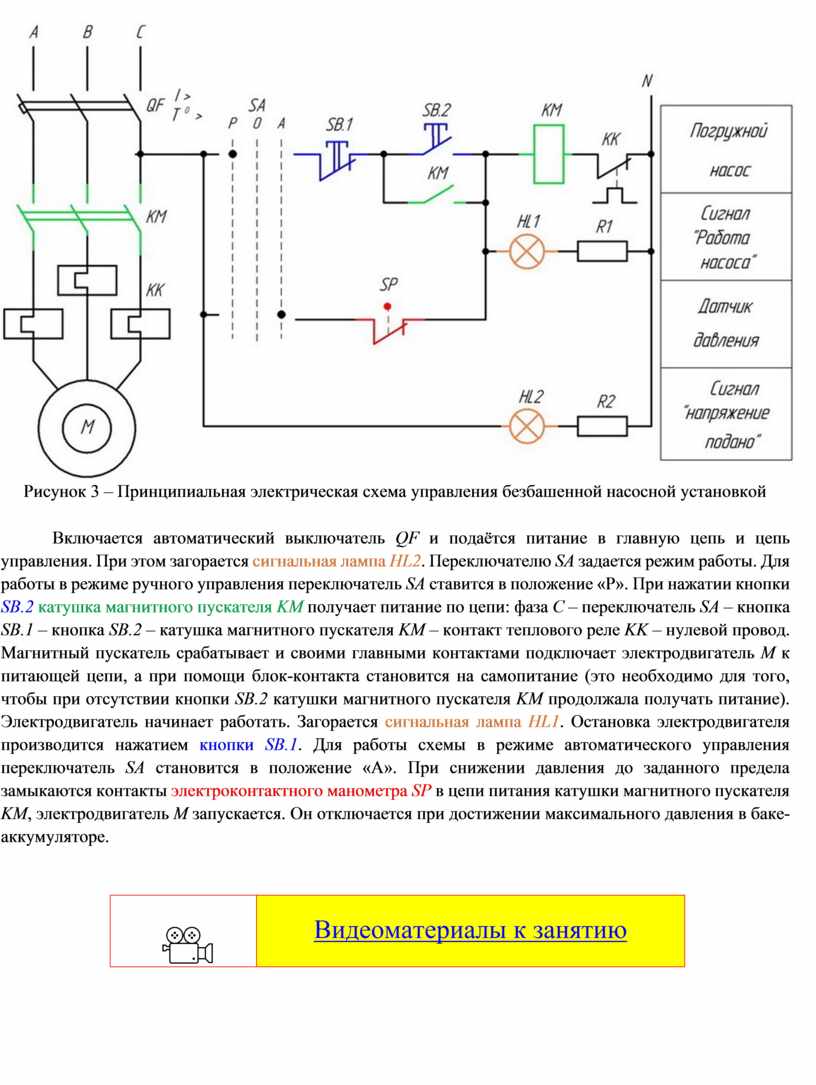
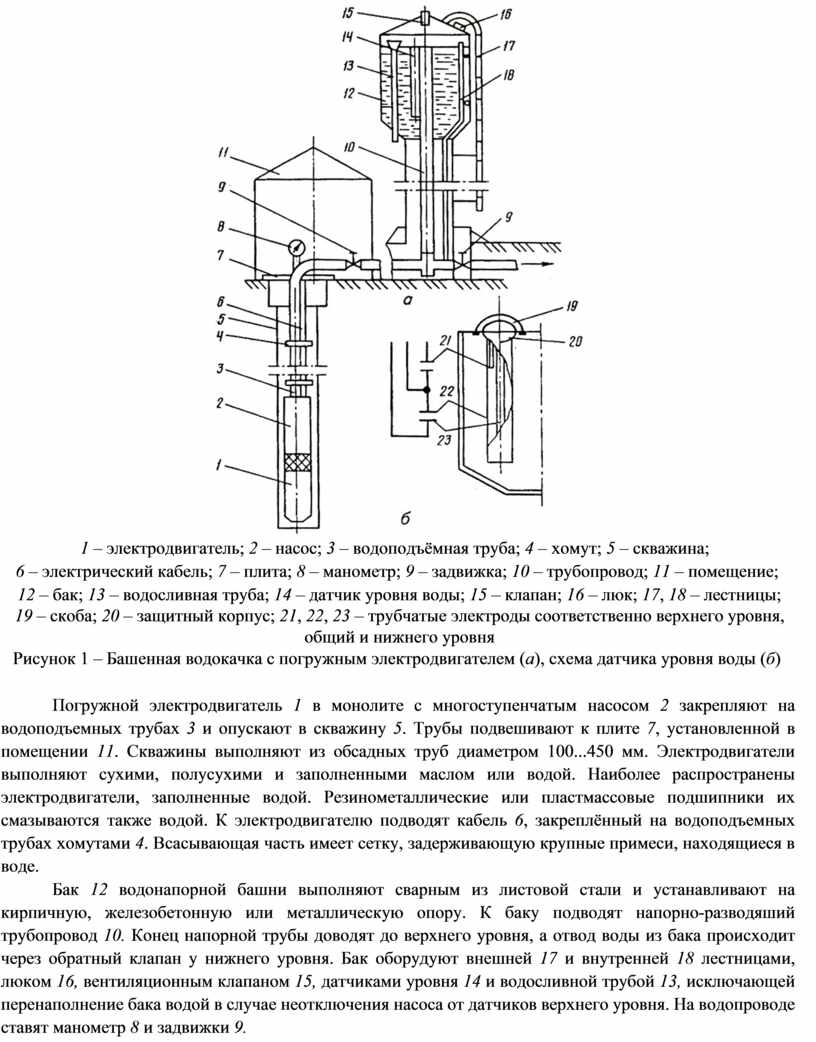

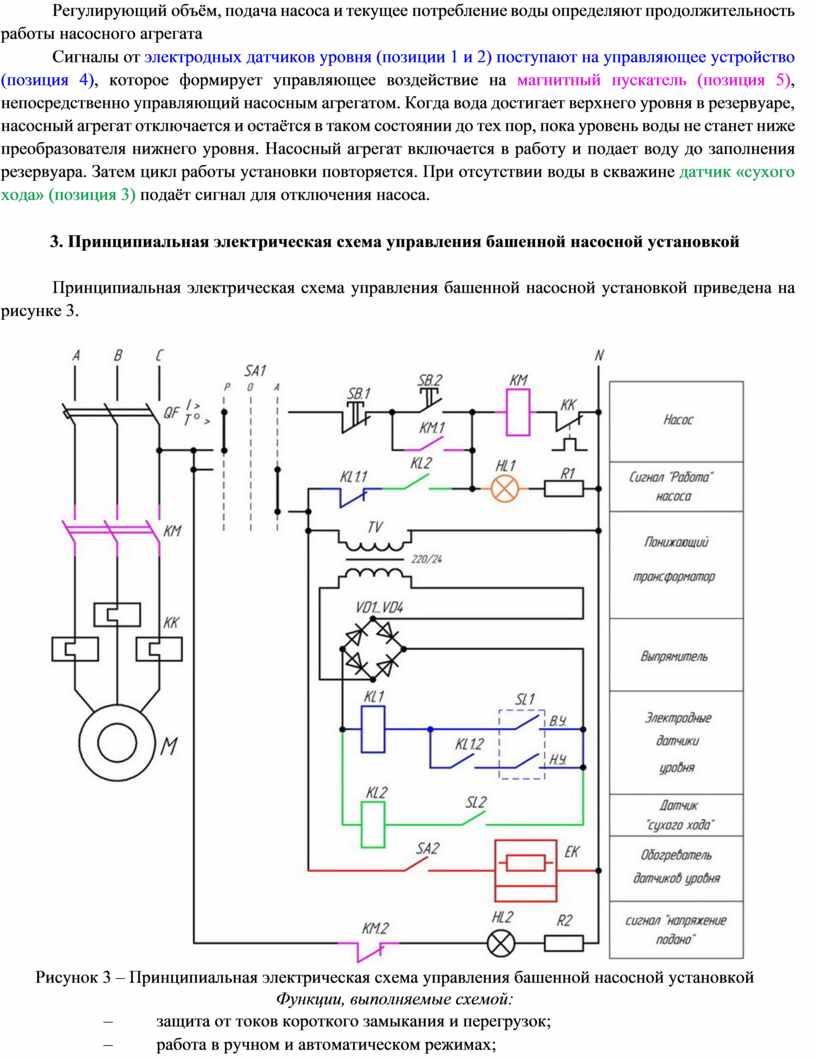
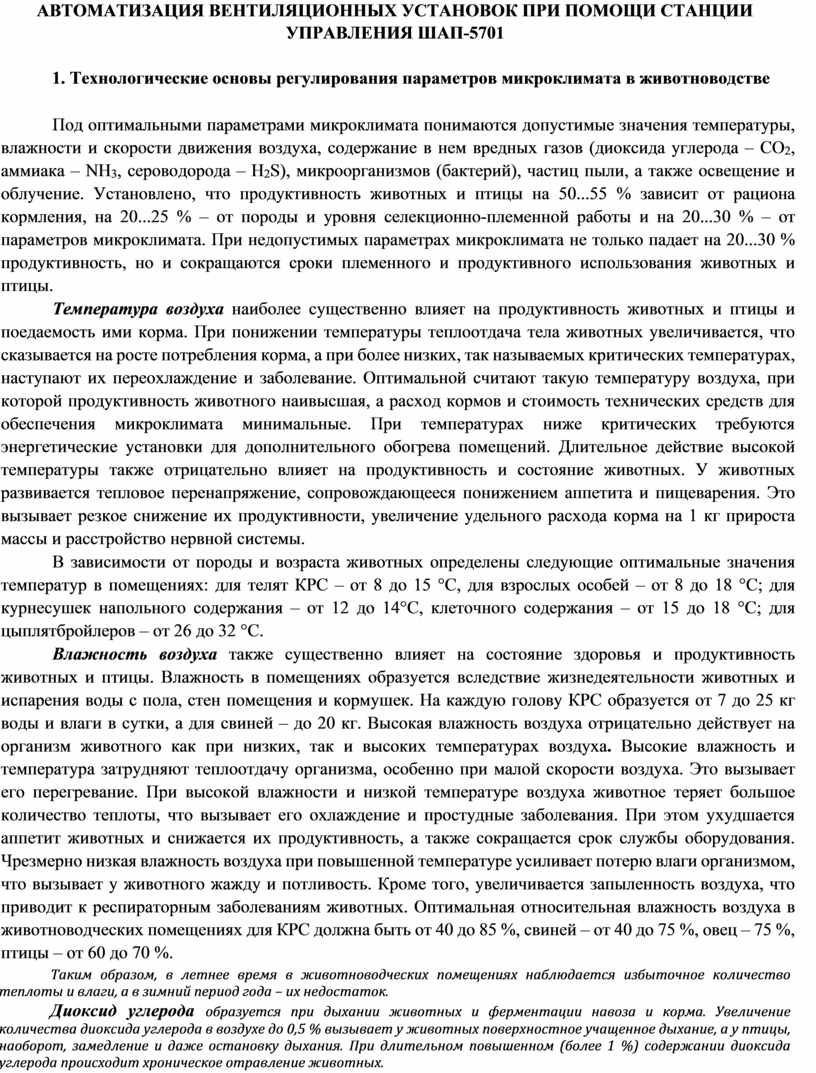
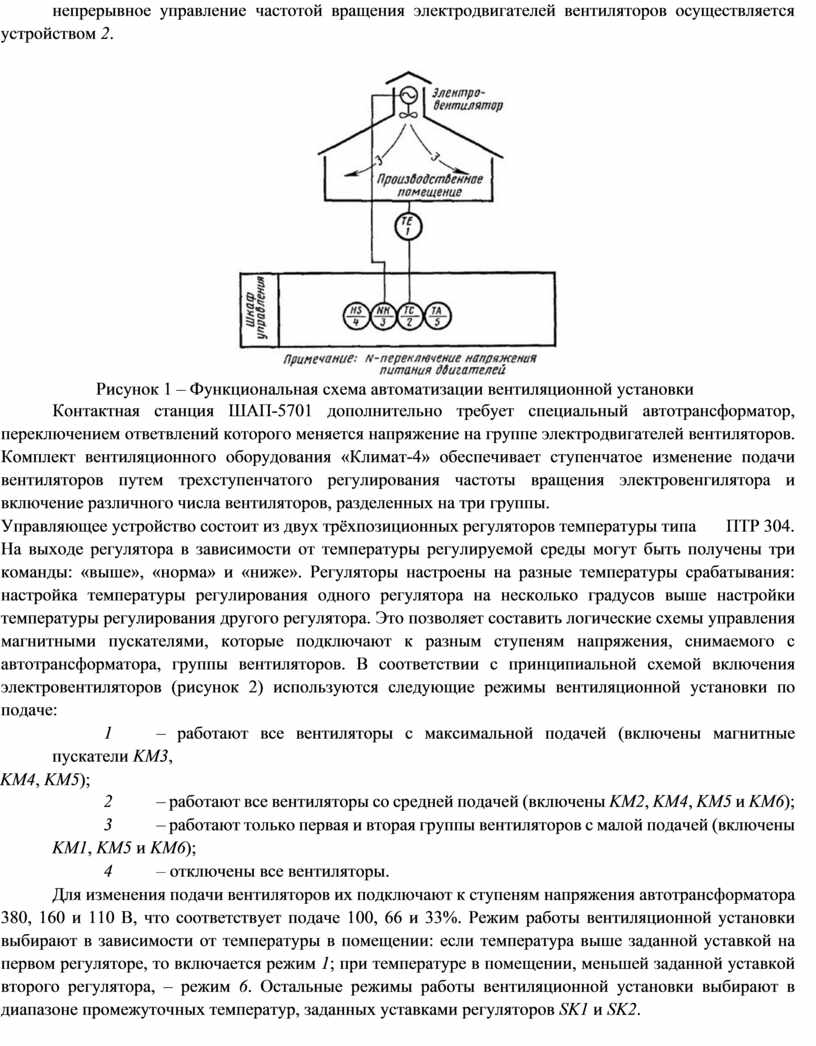
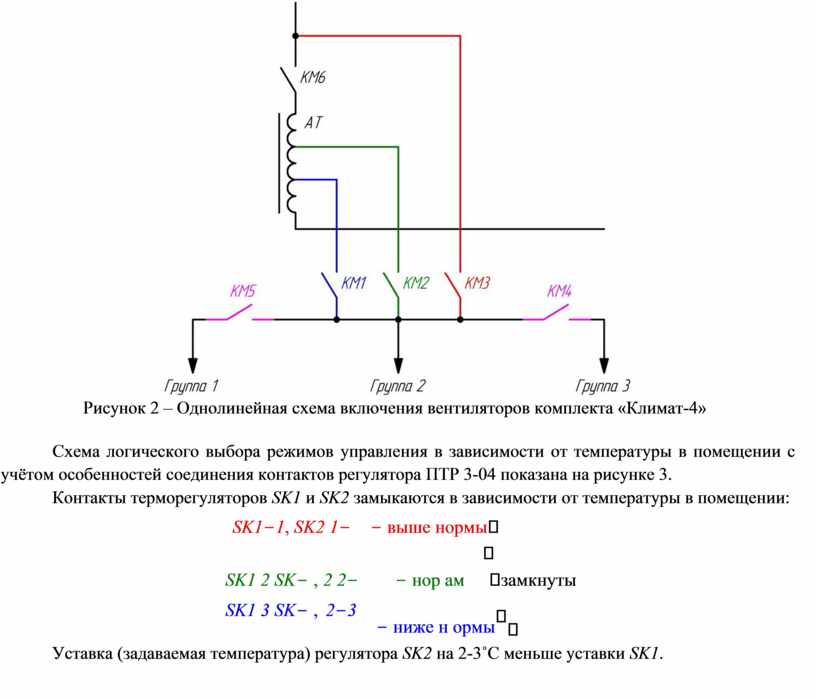
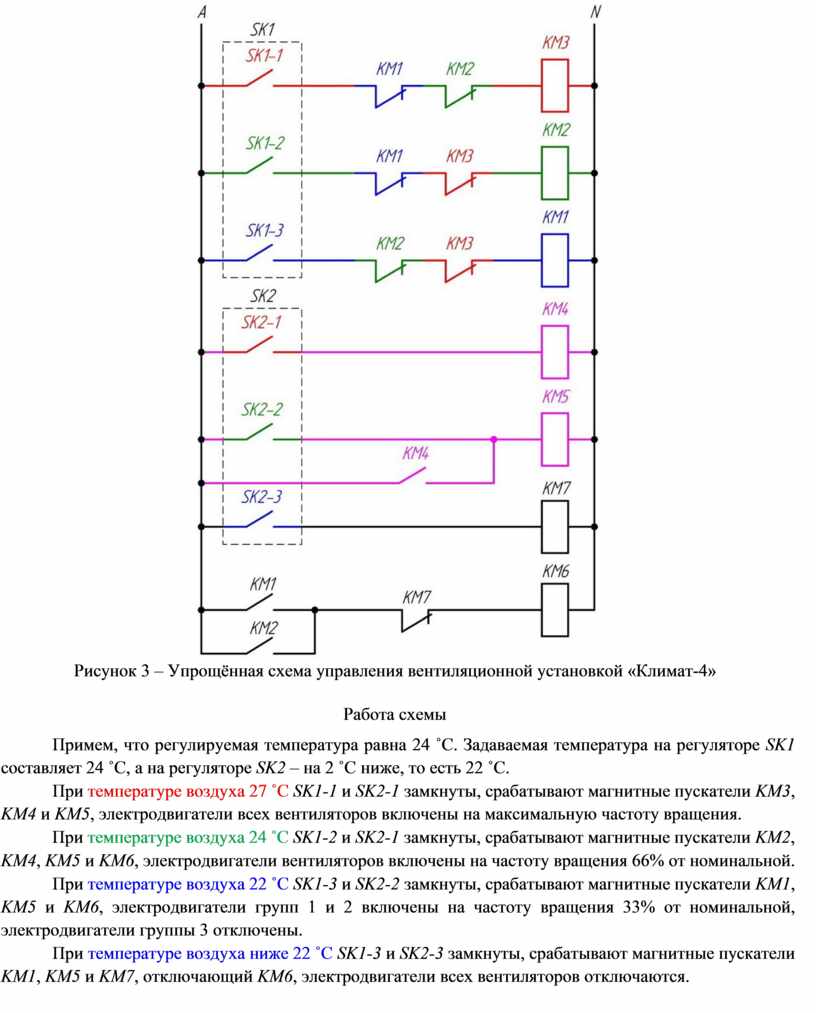
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.