Поделиться

МИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ ДОНЕЦКОЙ НАРОДНОЙ РЕСПУБЛИКИ
ГОРЛОВСКИЙ КОЛЛЕДЖ ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЙ И ЭКОНОМИКИ
ТЕОРЕТИЧЕСКОЕ ПОСОБИЕ
по дисциплине
«ЭЛЕКТРИЧЕСКИЕ МАШИНЫ»
Специальность 27.02.04 «Автоматические системы управления»
г. Горловка, 2016 г
.
Теоретическое пособие по
дисциплине «Электрические машины» разработал преподаватель: А.В. Исаев -
Горловка: ГКПТЭ, 2016.- 156 с.
Вложенные теоретические основы учебного материала по курсу «Электрические машины» в виде тематических лекций по блокам модулей в соответствии рабочей учебной программе дисциплины по дневной форме обучения. Содержание лекций содержит теоретический материал, вынесенный на самостоятельную проработку студентами с соответствующими отметками. Приведенные варианты контрольных вопросов по темам лекций.
Предназначен для использования при организации аудиторного учебного процесса и самостоятельной работы программного материала студентами дневной и заочной форм обучения специальности 27.02.04 «Автоматические системы управления»
Рассмотрены и приняты на заседании комиссии профессиональной электромеханической подготовки протокол № 1 от « 31 » 08.2016 г.
Протокол №__1__ 2016.31.08.
председатель ц/к ________________ Е.П. Бондаренко
СОДЕРЖАНИЕ
|
БЛОК 1 - ПП 03.07.01 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И АППАРАТЫ Содержательный модуль 1: Трансформаторы |
|
|
Тема 1. Введение |
4 |
|
Тема 2. Однофазные трансформаторы |
7 |
|
Тема 3. Трехфазные трансформаторы |
9 |
|
Тема 4. Трансформаторы специального назначения |
11 |
|
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 2: Электрические машины постоянного тока |
|
|
Тема 5. Общие сведения машины постоянного тока |
16 |
|
Тема 6. Генераторы постоянного тока (ГП) |
25 |
|
Тема 7. Двигатели постоянного тока (ДПТ) |
31 |
|
Тема 8. Тахогенераторы постоянного тока |
37 |
|
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 3: Электрические машины переменного тока. |
|
|
Тема 9. Общие сведения о электрические машины переменного тока |
38 |
|
Тема 10. Асинхронные двигатели |
41 |
|
Тема 11. Синхронные машины переменного тока |
45 |
|
Тема 12. Шаговые двигатели |
47 |
|
Тема 13. Тахогенераторы переменного тока |
49 |
|
БЛОК 2 - ЧП 03.07.02 ЭЛЕКТРООБОРУДОВАНИЯ СТАНКА С ПУ И РТК СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 4: Назначение и состав электрооборудования станков с ПУ и РТК |
|
|
Тема 14. Общие сведения о назначении и состав электрооборудования станков с ЧПУ и РТК |
50 |
|
Тема 15. Электромагнитные реле постоянного и переменного тока |
55 |
|
Тема 16. Аппараты ручного управления |
63 |
|
Содержательный модуль 5: Электромагнитные устройства автоматики |
|
|
Тема 17. Электромагниты |
65 |
|
Тема 18. Электромагнитные муфты |
75 |
|
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 6: Аппаратура релейно-контактной управления |
|
|
Тема 19. Аппаратура релейно-контактной управления двигателями постоянного тока (ДПТ) |
95 |
|
Тема 20. Аппараты дистанционного управления асинхронными двигателями (АД) |
103 |
|
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 7: Аппаратура электрической защиты |
|
|
Тема 21. Аппаратура электрической защиты |
112 |
|
Тема 22. Схемы электрической защиты и блокировки |
133 |
|
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 8: Автоматическое управление станками с ПУ и РТК |
|
|
Тема 23. Автоматическое управление в функции пути. |
136 |
|
Тема 24. Автоматическое управление в функции времени |
142 |
|
Тема 25. Автоматическое управление в функции скорости и нагрузки |
149 |
|
Тема 26. Электрооборудование автоматических линий |
155 |
БЛОК 1-ПП 03.07.01 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И АППАРАТЫ
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 1: ТРАНСФОРМАТОРЫ
Тема 1. Вступление
1.1 Общие понятия о электрооборудования станков с ЧПУ и ПР
1.2 Роль электрификации в автоматизации процес сов
1.3 Классификация трансформаторов
1.4 Назначение. Устройство и принцип действия.
1.1 Общие понятия о электрооборудования станков с ЧПУ и ПР
Для эксплуатации современного электрооборудования нужны разносторонние знания по модернизации существующего электрифицированного и автоматизированного производства и создание нового высокоэффективного и гибкого технологически совершенного производства. Специалисты в области электрооборудования промышленных предприятий должны хорошо знать электрическую часть, конструкцию установок и технологические процессы с тем электрооборудованием, которое является основой современных автоматизированных производственных комплексов. В современной технологии и оборудовании большую роль играет электрооборудования, то есть совокупность электрических машин, аппаратов, приборов и устройств, использованием которых выполняется преобразование электрической энергии в другие виды энергии и осуществляется автоматизация технологических процессов.
В современных условиях задачи эксплуатации, проектирования и модернизации существующего электрифицированного оборудования решаются совместными усилиями технологов, механиков и электриков.
1.2 Роль электрификации в автоматизации процессов
Важнейшим направлением научно-технического прогресса, базой для всех других направлений является электрификация. Электрификация промышленности представляет собой процесс широкого внедрения электроэнергии как источника питания производственного силового аппарата в технологические процессы, средства управления и контроля хода производства.
На основе электрификации производства осуществляется комплексная механизация и автоматизация производства, внедрение прогрессивной технологии. Электрификация обеспечивает в промышленности замену труда машинным, расширяет влияние электроэнергии на предметы труда. Особенно большая эффективность применения электрической энергии в технологических процессах, технические средствах автоматизации производства и управления, инженерных расчетах, обработке информации, в счетно-вычислительных машинах. Советов важных преимуществ перед традиционными механическими средств обработки металлов и других материалов имеет электрофизические и электромеханические методы. Они дают возможность получать изделия сложных геометрических форм, точные по размерам, различие в соответствующие шероховатости поверхности и укреплены в местах обработки. Не остается секретом, что использование энергии составляет большую часть себестоимости продукции, особенно это касается энергоемких производств. Какой же остается выход, чтобы снизить себестоимость продукции за счет электроэнергии, если простое сокращение ее потребления приведет просто к снижению объемов производства, а никак не к снижению себестоимости продукции? Выход - получение более дешевой энергии, полученной с помощью альтернативных, новых видов производства энергии.
1.3 Классификация трансформаторов
Трансформатор - электрический аппарат, состоящий из набора индуктивно связанных обмоток на каком магнитопроводе или без него и предназначенное для преобразования посредством электромагнитной индукции одной или нескольких систем переменного тока в одну или несколько других систем переменного тока без изменения частоты систем (системы) переменного тока.
Трансформаторы классифицируют:
по назначению:
- силовые (для питания силового и осветительного нагрузок)
-специальные (для питания токоприёмников специального назначения)
-измерительные (для преобразования контрольного сигнала стандартной величины, подлежащего измерению)
- преобразующие (для преобразования числа фаз переменного сигнала, для преобразования частоты, для выпрямительных установок )
-импульсные (для получения импульсных сигналов и другого, возникающих в установках автоматики и телемеханики)- автотрансформатор (для преобразования напряжения в небольших пределах)
по числу фаз, трансформируются:
- однофазные
- трехфазные
- многофазные
по форме магнитной системы:
- стержневые
- броневые,
- многостержневые
по числу обмоток на фазу:
- двухобмоточные
- многообмоточные
по виду охлаждения
- с воздушным (сухие тр),
- Масляным (масляные)
- Охлажденным негорючим диэлектриком
1.4 Назначение. Устройство и принцип действия.
 В простейшем случае трансформатор состоит из двух
катушек (обмоток), надетых на замкнутый сердечник. Одна из обмоток - первичная
- соединена с источником переменного напряжения. Вторая обмотка - вторичная - к
которой присоединяют нагрузки, то есть приборы и устройства, которые потребляют
электроэнергию.
В простейшем случае трансформатор состоит из двух
катушек (обмоток), надетых на замкнутый сердечник. Одна из обмоток - первичная
- соединена с источником переменного напряжения. Вторая обмотка - вторичная - к
которой присоединяют нагрузки, то есть приборы и устройства, которые потребляют
электроэнергию.
Рисунок 1.1 Трансформатор
Сердечники набирается из тонких изолированных листов трансформаторной стали для борьбы с токами Фуко.
Преимущественное использование в электрических устройствах получили силовые трансформаторы, преобразующие напряжение переменного тока при неизменной частоте. Трансформаторы для преобразования не только напряжения переменного тока, но и для частоты, количества фаз и т.д. называют трансформаторными устройствами специального назначения.
Преимущественное использование в электрических устройствах получили силовые трансформаторы, преобразующие напряжение переменного тока при неизменной частоте. Трансформаторы для преобразования Не только напряжения переменного тока, но и для частоты, количества фаз и т.д. называют трансформаторными устройствами специального назначения.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1 Что такое электрификация?
2 Что такое трансформатор?
3 Как классифицируют трансформаторы?
4 Из чего состоит трансформатор?
5 Где используются трансформаторы?
Тема 2. Однофазные трансформаторы
2.1 Режимы работы
2.2 Характеристики. Использование в станках с ЧПУ и РТК
2.1 Режимы работы
Режим холостого хода - это режим, при котором на первичную обмотку подается напряжение, а вторичная обмотка разомкнута. В режиме холостого хода ток во вторичной обмотке I2 = 0 а ток первичной обмотки, который сказывается I1,0, очень мал и не превышает нескольких процентов от номинального первичного тока. Таким образом, в режиме холостого хода
 (2.1)
(2.1)
Коэффициент трансформации будет равна:
![]() (2.2)
(2.2)
Потери мощности в трансформаторе равна
∆P = Pм + Pст (2.3)
где Pм - потери мощности в меди (в первичной и вторичной обмотках)
Pст - потери мощности в стали (в магнитопроводе)
Таким образом, в режиме холостого хода определяется коэффициент трансформации и потери мощности в магнитопроводе.
Режим короткого замыкания - это аварийный режим работы трансформатора, в котором на первичную обмотку подается номинальное напряжение. А сопротивление нагрузки равна нулю. В аварийном режиме короткого замыкания устанавливаются большие токи короткого замыкания, которые приводят к выходу из строя обмоток трансформатора, а потому обязательно в круги обеих обмоток устанавливают предохранители. Надо отличать режим короткого замыкания от опыта короткого замыкания. Опыт короткого замыкания проводится при пониженном напряжении. Опытом короткого замыкания определяют потери мощности в меди. Таким образом, если провести опыты короткого замыкания и холостого хода, можно определить потери мощности в трансформаторе и его коэффициент полезного действия.
![]() (2.4)
(2.4)
2.2 Характеристики. Использование в станках с ЧПУ и РТК
Однофазный трансформатор небольшой мощности применяют как сварочного, сварочного, испытательного, специального назначения и для бытовых нужд.
Измерительный однофазный трансформатор предназначен для включения электрических измерительных приборов в сети высокого напряжения или сильного тока.
Испытательный однофазный трансформатор используется для получения высоких и сверхвысоких напряжений, необходимых при испытаниях на электрическую прочность электроизоляционных изделий. Однофазные трансформаторы - радиотрансформаторы, применяются в устройствах радио- и проводной связи, в системах автоматики и телемеханики для получения необходимых напряжений, согласования сопротивлений электрических цепей, гальванического разделения цепей и др.
Мощный однофазный трансформатор служит для трансформации электрической энергии трехфазного тока и для питания специальных промышленных установок.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1 Охарактеризуйте режим холостого хода трансформатора
2 Охарактеризуйте режим короткого замыкания трансформатора
3 Использование однофазных трансформаторов
4 Чему равен коэффициент трансформации?
Тема 3. Трехфазные трансформаторы (на самостоятельную проработку)
3.1 Назначение. Устройство и принцип действия
3.2 Характеристики. Использование
3.1 Назначение. Устройство и принцип действия
Для преобразования электрической энергии трехфазного тока одного напряжения в электрическую энергию трехфазного тока другого напряжения используют трехфазные трансформаторы.
Рисунок 3.1. Схема трехфазного трансформатора
В трехфазных трансформаторах магнитопровод из листовой электротехнической стали состоит из трех стержней, замкнутых на краях ярмами. На каждом стержне намотаны обмотки высшего и низшего напряжений, которые относятся к одной фазы. Начала фаз обмотки высшего напряжения обозначаются заглавными буквами А. В, С, а концы - X, Y, Z, а ниже - начала строчными буквами а, в, с, а концы - х, у, z.
Каждая обмотка трехфазного трансформатора является однофазным трансформатором, а потому все, о чем шла речь при рассмотрении однофазных трансформаторов, полностью касается отдельной фазы трёхфазного трансформатора.
Первичные обмотки трехфазного трансформатора соединяются по схемам звезды и треугольника. По таким же схемам соединяются и вторичные обмотки.
Соединение по схеме звезды обозначается символом В, а по схемою треугольника - Δ. Если обмотка трансформатора соединена звездой и имеет выведенную нейтральную (нулевую) точку, то это обозначается символом Y-.
Работа нескольких трехфазных трансформаторов на общую нагрузку (сеть) при параллельном соединении их первичных и вторичных обмоток называется параллельной работой трансформаторов.
Параллельная работа трехфазных трансформаторов более экономная по сравнению с тем, когда они работают обособленно. Кроме того, в этом случае создается некоторый резерв мощности.
3.2 Характеристики. Использование
Для питания различных узлов электроприборов требуются самые разнообразные напряжения. Блоки питания в устройствах, которым необходимо несколько напряжений различной величины содержат трансформаторы с несколькими вторичными обмотками или содержат в схеме дополнительные трансформаторы. Например, в телевизоре с помощью трансформаторов получают напряжения от 5 вольт (для питания микросхем и транзисторов) до нескольких киловольт (для питания анода кинескопа через умножитель напряжения). В прошлом в основном применялись трансформаторы, работающие с частотой электросети, то есть 50-60 Гц. В схемах питания современных радиотехнических и электронных устройств (например, в блоках питания персональных компьютеров) широко применяются высокочастотные импульсные трансформаторы. В импульсных блоках питания переменное напряжение сети сначала выпрямляют, а затем преобразуют с помощью инвертора в высокочастотные импульсы. Система управления с помощью широтно-импульсной модуляции (ШИМ) позволяет стабилизировать напряжение. После чего импульсы высокой частоты подаются на импульсный трансформатор, на выходе из которого, после выпрямления и фильтрации получают стабильное постоянное напряжение. В прошлом сетевой трансформатор (на 50-60 Гц) был одним из самых тяжелых деталей многих приборов. Дело в том, что линейные размеры трансформатора определяются передаваемой им мощностью, причем оказывается, что линейный размер сетевого трансформатора примерно пропорционален мощности в степени 1/4. Размер трансформатора можно уменьшить, если увеличить частоту переменного тока. Поэтому современные импульсные блоки питания при одинаковой мощности значительно легче. Трансформаторы 50-60 Гц, несмотря на их недостатки, продолжают использовать в схемах питания, в тех случаях, когда нужно обеспечить минимальный уровень высокочастотных помех, например при высококачественном звуковоспроизведения.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Из чего состоит трёхфазный трансформатор?
2. Принцип действия трёхфазного трансформатора
3.
Где используются трехфазные
трансформаторы?
Тема 4. Трансформаторы специального назначения
(на самостоятельную проработку)
4.1 Сварочные трансформаторы
4.2 Измерительные трансформаторы
4.3 Автотрансформаторы
4.4 Строение и принцип действия
4.5 Характеристики і использование
4.1 Сварочные трансформаторы
Для питания сварочной дуги переменным током предназначены сварочные трансформаторы. Они просты по устройству, отличаются малыми размерами и весом, имеют высокий КПД и тратят электроэнергии почти в два раза меньше по сравнению с источниками постоянного тока.
Сварочные трансформаторы должны отвечать следующим требованиям:
-Иметь падающую внешнюю характеристику;- ограничивать ток короткого замыкания
-Иметь напряжение холостого хода не выше 80 В;
 -Плавно и в широких пределах регулировать значение
сварочного тока и та в широких пределах регулировать значение сварочного тока.
-Плавно и в широких пределах регулировать значение
сварочного тока и та в широких пределах регулировать значение сварочного тока.
Рисунок 4.1 Сварочный трансформатор
4.2 Измерительные трансформаторы
Основной задачей измерительных трансформаторов являются:
- Изоляция измерительных приборов и аппаратов автоматической защиты от круга высокого напряжения, для безопасности измерения;
- Расширение пределов измерения измерительных приборов.
Измерительные трансформаторы бывают двух типов:
-Трансформаторы напряжения;
-Трансформаторы тока.
Первичная обмотка (обмотка высшего напряжения) трансформатора напряжения включается как вольтметр.
На вторичную обмотку включается вольтметр и цепи напряжения других приборов. Итак,
 (4.1)
(4.1)
Первичной обмоткой трансформатора тока является сама
линия. Вторичную обмотку замыкают на амперметр и цепи тока других измерительных приборов. Итак,
 (4.2)
(4.2)

 (4.3)
(4.3)
Рис 4.2 Измерительные трансформаторы
4.3 Автотрансформаторы
Автотрансформаторы бывают однофазными и трехфазными, повышающими и понижающими. Принципиальная схема однофазного автотрансформатора изображена на рисунке.
Трансформаторы бывают однофазными и трехфазными, повышающей и понижающей. Принципиальная схема однофазного автотрансформатора изображений на рисунке.
Сварочный трансформатор преобразует переменный ток одного напряжения в переменный ток другого напряжения той же частоты и служит для питания сварочной дуги. Трансформатор имеет стальной сердечник (магнитопровод) и две изолированные обмотки. Обмотка, подключенная к сети, называется первичной, а обмотка, подключенная к электрододержателю и изделие.

Рисунок 4.3 Автотрансформатор
4.4 Строение и принцип действия
свариваемого вторичной. Для надежного зажигания дуги вторичное напряжение сварочных трансформаторов должно быть не менее 60-65 В; напряжение дуги при ручной сварке обычно не превышает 20-30 В.
Автотрансформатор отличается от обычного трансформатора тем, что у него первичная и вторичная обмотка соединены в одно общее электрическую цепь. При этом обмотка низшего напряжения является частью обмотки высшего напряжения.
Измерительные трансформаторы используются для включения измерительных приборов и реле в цепи высокого напряжения. Измерительные трансформаторы являются понижающими. Поэтому они позволяют использовать обычные приборы для измерения больших напряжений, токов, мощностей и при этом повышают безопасность обслуживающего персонала.
Измерительные трансформаторы используются для включения измерительных приборов и реле в цепи высокого напряжения. Измерительные трансформаторы являются понижающий. Поэтому они позволяют использовать обычные приборы для измерения больших напряжений, токов, мощностей и при этом повышают безопасность обслуживающего персонала.
Трансформаторы тока предназначены для измерения больших токов, когда невозможно включения приборов непосредственно на токи контролирующих кругов. Они состоят из замкнутого сердечника и двух обмоток - первичной и вторичной. Вторичную обмотку изолируют от первичной и заземляющих ее с точки зрения обеспечения безопасности обслуживающему персоналу. Количество витков в первичной и вторичной обмотках должна быть такой, чтобы ток во вторичной обмотке при номинальной в первичной составил 5А.
4.5 Характеристики и использование
Трансформаторы широко используются в различных целях.
- Для передачи и распределения электрической энергии. В настоящее время для высоковольтных линий электропередач применяются силовые трансформаторы с масляным охлаждением напряжением 330, 500 и 750 кВ, мощностью до 1200 - 1600 МВ * А. Таким образом снижаются потери энергии и сокращается расход цветных металлов. Трансформаторы, повышая напряжение, автоматически уменьшают ток, поэтому передаваемая мощность остается неизменной, а потери в проводах линии, пропорциональны квадрату силы тока, резко сокращаются. Например, при увеличении напряжения передаваемой энергии в 10 раз потери снижаются в 100 раз. Для повышения напряжения линий электропередачи устанавливают трансформаторы, повышающие а чтобы напряжение снизить до величины, на которую строят токоприемники (от 127 В до нескольких киловольт), в конце линии устанавливают понижающие трансформаторы. Для этого сооружают подстанции, распределяющие электроэнергию между группами потребителей (заводами, фабриками, поселками домами и др.).
В современной электроэнергетике главную роль играют силовые трансформаторы, т.е. трансформаторы, служащие для преобразования электрической энергии в электрических сетях и установках, принимающих и используют ее. К силовым относятся трехфазные и многофазные трансформаторы мощностью 6,3 кВА и более н однофазные мощностью 5 кВА и более.
- Для обеспечения нужной схемы включения вентилей в преобразовательных устройствах и согласования напряжения на входе и выходе преобразователя. Трансформаторы, применяются для этой цели, называются преобразовательными. Их мощность достигает тысячи киловольт-ампер, напряжение 110 кВ; они работают при частоте 50 Гц и более.
Данные трансформаторы выполняют одно-, трех- и многофазными с регулировкой выходного напряжения в широких пределах и без регулирования.
- Для различных технологических целей: сварки (сварочные трансформаторы), питание электротермических установок (электропечные трансформаторы) и др. Мощность их достигает десятков тысяч киловольт-ампер при напряжение до 10 кВ; они работают обычно при частоте 50 Гц
- Для включения электроизмерительных приборов и некоторых аппаратов, например реле, в электрические цепи, по которым проходят большие токи, с целью расширения пределов измерения и обеспечения электробезопасности. Трансформаторы, применяемые для этой цели, называются измерителями.
- Для включения электроизмерительных приборов и Некоторых аппаратов, например реле, в электрические цепи, по Которым проходят большие токи, с целью расширения пределов измерения и обеспечения электробезопасности. Трансформаторы, применяемые для этой цели, называются измеритель.
- Для питания различных цепей радио- и телевизионной аппаратуры; устройств связи, автоматики и телемеханики, электробытовых приборов; для разделения электрических цепей различных элементов этих устройств; для согласования напряжения и т.п.
Трансформаторы, используемые в этих устройствах, обычно имеют малую мощность (от нескольких вольт-ампер до нескольких киловольт-ампер), невысокую напряжение, работают при частоте 50 Гц и более. Их выполняют двух-, трех- и многообмоточных; условия работы, предъявляемые к ним требования и принципы проектирования весьма специфичны.
Как правило, трансформаторы питания изготавливаются комбинированными, то есть позволяют снимать несколько напряжения; при этом первичная обмотка (сетевая) может быть выполнена в виде одной обмотки с двумя отводами или двух одинаковых обмоток с одним отводом в каждом из них.
Во втором варианте первичная обмотка на различное напряжение (110, 127 или 220 В) переключается специальным сетевым переключателем. Обмотка трансформатора питания, повышающий выполняется со средним выводом при использовании двухполупериодного выпрямителя на двух диодах и без среднего вывода для мостовой схемы выпрямителя.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Что такое автотрансформаторы?
2. Какова основная задача измерительных трансформаторов?
3. Для чего предназначены сварочные трансформаторы?
4. Каким требованиям должны соответствовать сварочные трансформаторы?
5. Принцип
действия трансформаторов специального назначения
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 2: ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПОСТОЯННОГО ТОКА
Тема 5. Общие сведения о электрические машины постоянного тока
5.1 Классификация электрических машин постоянного тока в составе электрооборудования станков с ПУ и РТК
5.2 Устройство основных узлов машин постоянного тока
5.3 Коммутация и реакция якоря машины постоянного тока и средства ее улучшения (на самостоятельное изучение)
5.4 Роль добавочных полюсов (на самостоятельное изучение)
5.5 Схемы включения обмоток возбуждения (на самостоятельную проработку)
5.6 Потери и КПД машин постоянного тока (на самостоятельную проработку)
5.7 Электродвижущая сила и электромагнитный момент машин постоянного тока (на самостоятельное изучение)
5.1 Классификация электрических машин постоянного тока в составе электрооборудования станков с ПУ и РТК
Одна и та же машина постоянного тока в принципе может работать и как генератор, и как двигатель. (Это свойство машины постоянного тока, называется оборачиваемостью, позволяет не рассматривать отдельно строение генератора или двигателя.) Однако каждую электрическую машину производитель выпускает с определенным назначением - работать только как генератор или только как двигатель. Очень редко используют машины постоянного тока, предназначены для работы как генератором, так и двигателем.
Генераторы постоянного тока применяют тогда, когда нужно иметь самостоятельный источник тока, например для питания некоторых видов электромагнитов, электромагнитных муфт, электродвигателей, сварочных установок, находят применение в установках для зарядки аккумуляторных батарей и агрегатах, преобразующие переменный ток в постоянный, необходимый для питания электролизных установок и других потребителей постоянного тока; в синхронных машинах переменного тока для питания обмотки питания ротора; в электромашинных агрегатах, которые используются в промышленности для широкого и плавного регулирования скорости рабочих машин, например в троллейбусах, электровозах, некоторых типах подъемных кранов, в приборах автоматики.
5.2 Строение основных узлов машин постоянного тока
Статор машины постоянного тока состоит из станины и сердечника. Станину изготавливают из малоуглеродистой стали, имеет значительную магнитную проницаемость. Поэтому станина есть также и магнитопроводом. Одновременно это основная деталь, объединяющая другие детали и сборочные единицы машины в единое целое. Так, к станине с середины прикрепляют болтами полюса, которые состоят из сердечника, полюсного наконечника и катушки.
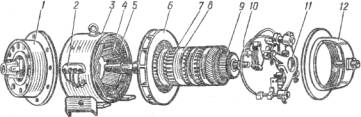
Рисунок 5.1 Устройство машины постоянного тока:
1 - задний подшипниковый щит; 2 - зажимы; 3 - станина; 4 - главный полюс; 5 - обмотка главного полюса; 6 - вентилятор; 7 - обмотка якоря; 8 - сердечник якоря; 9 - коллектор; 10 - вал; 11 - траверса с щитков механизмом; 12 - передний подшипниковый щит
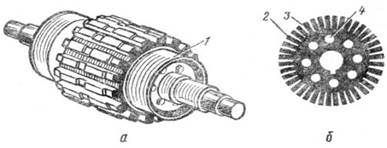
Рисунок 5.2 Якорь машины постоянного тока:
а - якорь без обмотки; б - стальной лист сердечника якоря; 1 - нажимные шайбы; 2 - зубец; С - паз; 4 - вентиляционное отверстие
Ротор (якорь) машины постоянного тока состоит из сердечника и обмотки. Сердечники якоря набирают из тонких листов электротехнической стали, изолированных друг от друга лаковым покрытием, что уменьшает потери на вихревые токи. В пазы сердечника вкладывают обмотку якоря. В сердцевине якоря делают вентиляционные каналы. Чтобы ток от обмотки якоря во внешнюю цепь (в генераторе) или с зовнишнього круга до обмотки якоря (в двигателе) проходил в одном и том же направлении, в машине постоянного тока устанавливают коллектор. Набирают его из медных пластин, изолированных друг от друга миканитовыми прокладками. Каждую пластину коллектора соединяют с одним или несколькими витками обмотки якоря. Сердечники якоря и коллектор закрепляют на одном валу. Итак, коллектор - это устройство, которое конструктивно объединенный с якорем (ротором) электрической машины и является механическим преобразователем частоты.
5.3 Коммутация и реакция якоря машины постоянного тока и средства ее улучшения
Работа машин постоянного тока часто сопровождается искрением между щетками и коллектором. Сильное искрение делает нормальную работу машины невозможной.
Причинами искрение могут быть механические дефекты: шероховатая поверхность коллектора, слабый давление щеток, загрязнение коллектора, вибрация и другие неисправности, приводящие к нарушению в отдельные моменты времени контакта щеток с коллектором.
В процессе эксплуатации бывают случаи, когда машина, вполне дело в механическом отношении, сильно искрит. Причиной искрение здесь есть физический процесс, происходящий при переходе щетки с одной коллекторной пластины на другую. Суть этого процесса объясним схеме якорной обмотки с 16 стержнями.
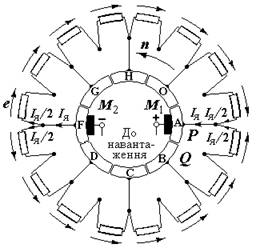
Рисунок 5.3 Коммутация
При вращении якоря коллекторные пластины поочередно вступают в контакт со щетками. При этом переход щетки с одной пластины на другую, например щетки М1 с пластины А на пластину В, будет сопровождаться переключением секции PQ якорной обмотки с одной параллельной ветку на другую. При этом ток в этой секции меняется с + Iя / 2 в -Iя / 2. Вследствие быстрого изменения тока в секции (на величину Iя) возникает ЭДС самоиндукции Еl, величина которой тем больше, чем выше скорость вращения якоря. Комплекс явлений, связанных с изменением направления тока в замкнутых щеткой секциях якорной обмотки, называют коммутацией.
ЕРС еL, возникающая в секции коммутируемый, вызывает появление микроскопических дуг между краем щетки и коллекторной пластиной, выходит из-под щетки. Эти дуги снаружи воспринимаются как искрение щеток.
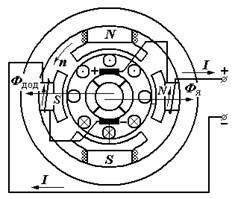
Рисунок 5.4 Дополнительные полюса
Основным средством борьбы с коммутационным искрением служат дополнительные полюса. Магнитный поток этих полюсов индуцирует в подвижной секции ЕРС ек, коммутируемого и направленную навстречу ЕРС еL, так что ек + еL » 0. Этим устраняется возникновения недопустимого искрения.
Нужно отметить, что если скорость вращения машины превышает предельно допустимое значение, то условие ек + еL » 0 нарушается и машина снова начинает искрить.
 |
 |
 |
|||
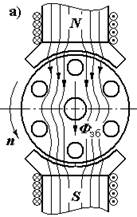
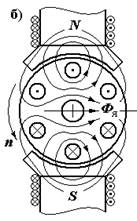
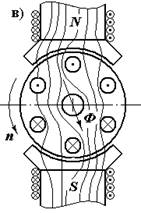
Рисунок 5.5 Реакция якоря
В нагруженном генераторе ток, проходящий по обмотке якоря, создает собственный магнитный поток Фя. В двухполюсного машине (рисунок 5.5 б) ось потока якоря Фя перпендикулярна оси основного потока (т.е. оси полюсов N-S). Два магнитных потоки Фзб и Фя образуют результирующий магнитный поток Ф машины. Влияние, которое оказывает магнитный поток якоря на основной магнитный поток, называют реакцией якоря.
Вследствие реакции якоря происходит деформация магнитного поля машины: увеличивается плотность магнитных линий с одной стороны каждого полюса и уменьшается плотность с другой стороны полюсов (рисунок 5.5 в). Реакция якоря вызывает нежелательные последствия: сильное искрение под щетками, что нарушает нормальную работу машины; уменьшение ЕРС генератора, что приводит к дополнительному снижению напряжения на клеммах генератора при увеличении его нагрузки.
Основным средством ослабления реакции якоря применение компенсационной обмотки, которая размещается в полюсах машины и соединяется последовательно с якорем.
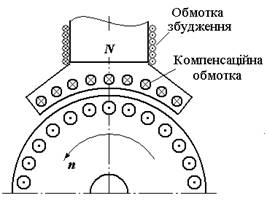
Рисунок 5.6 Обмотка
Магнитное поле, созданное током компенсационной обмотки, направленное навстречу магнитному полю обмотки якоря. Соответствующим выбором числа витков компенсационной обмотки можно добиться практически полной компенсации реакции якоря.
5.4 Роль дополнительных полюсов
Дополнительные полюса устанавливают в ма¬шинах повышенной мощности (более 1 кВт) для улучшения работы ма¬шины; обмотку дополнительных полюсов соединяют последовательно с обмоткой ротора (якоря).
5.5. Схемы включения обмоток возбуждения
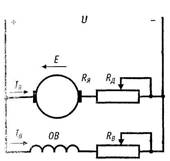
Рисунок 5.7 Схема параллельного возбуждения машины постоянного тока
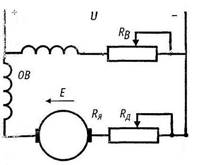
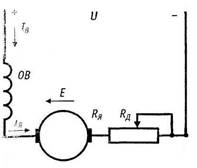 Рисунок 5.8 Схема смешанного возбуждения машины
постоянного тока
Рисунок 5.8 Схема смешанного возбуждения машины
постоянного тока
Рисунок 5.9 Схема последовательного возбуждения машины постоянного тока
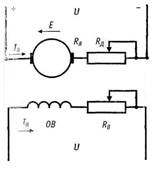
Рисунок 5.10 Схема независимого возбуждения машины постоянного тока
5.6 Потери и КПД машин постоянного тока
1) Магнитные потери в стали якоря Pc и в поверхностном слое полюсных наконечников Рп;
2) механические потери от трения: в подшипниках, вращающихся частей о воздух (сюда же надо отнести вентиляционные потери - на вращение вентилятора, если он есть), щеток о коллектор, Рмех;
3) электрические потери в обмотках цепи якоря и в переходных контактах щеток, Ре;
4) потери на возбуждение, РВ;
5) потери дополнительные, РДОБ.
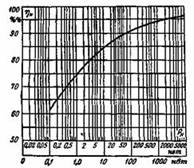
Рисунок 5.11 КПД машин постоянного тока
КПД генератора
 (5.1)
(5.1)
КПД генератора
 (5.2)
(5.2)
где SP - сумма перечисленных выше потерь
5.7 Электродвижущая сила и электромагнитный момент машин постоянного тока
В каждой машине постоянного тока имеет место взаимодействие между током якоря Iя и магнитным потоком Ф. На каждый стержень якоря действует электромагнитная сила F = В×I× l.
Направление действия этой силы определяется правилом левой руки.
Подставив сюда среднее
значение магнитной индукции ![]() и величину тока в каждом из стержней обмотки якоря
и величину тока в каждом из стержней обмотки якоря ![]() , получим
, получим
 .
(5.3)
.
(5.3)
Электромагнитный момент, действующий на якорь машины при числе проводников N обмотки якоря:
![]() или
или
![]() ,
(5.4)
,
(5.4)
где  – величина,
постоянная для данной машины.
– величина,
постоянная для данной машины.
В машинах постоянного тока относительно больших размеров магнитная система не одну, а несколько пар полюсов, расположенных равномерно вокруг якоря. Полярность полюсов чередуется. Для примера на рисунке показана магнитная система четырехполюсной машины.
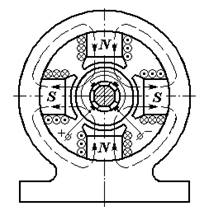
Рисунок 5.12 Магнитная система 4-полюсной машины постоянного тока.
Якорная обмотка также может, иметь не одну, а несколько пар параллельных ветвей. Число пар полюсов и число пар параллельных ветвей определяются в процессе проектирования электрической машины.
Если обозначить магнитный поток одного полюса Ф, число пар полюсов (которое всегда является парным) 2p, диаметр якоря d и длину его l, то среднее значение. магнитной индукции на поверхности якоря:
![]() (5.5)
(5.5)
Среднее значение ЭДС, индуцированной в каждом из стержней обмотки якоря при скорости вращения якоря n (об. / Мин),
 (5.6)
(5.6)
Поскольку ЭДС генератора равна результирующей ЭДС одной параллельной ветви обмотки якоря, то, обозначив через N общее число стержней обмотки якоря, а через 2а - число параллельных ветвей получим
 (5.7)
(5.7)
Для каждой машины величины р, N и а являются постоянными и в условиях эксплуатации не изменяются. Поэтому в дальнейшем будем пользоваться формулой
![]() (5.8)
(5.8)
где постоянный коэффициент ![]()
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Объясните сущность явления реакции якоря. Как она влияет на работу машины?
2 Какие существуют способы улучшения коммутации?
2 Какова роль дополнительных полюсов?
4 Схемы включения обмоток возбуждения
4 КПД и потери машин постоянного тока
Тема 6. Генераторы постоянного тока (ДПТ)
6.1 Генераторы постоянного тока с независимым возбуждением
6.2 Генераторы постоянного тока с параллельным возбуждением
6.3 Схемы. принцип действия
6.4 Характеристики. Использование
6.5 Генераторы постоянного тока с последовательным возбуждением (на самостоятельную проработку)
6.6 Схема. принцип действия
6.7 Характеристики. Использование (на самостоятельную проработку)
6.1 Генераторы постоянного тока с независимым возбуждением
На рисунке представлена электрическая схема генератора постоянного тока с независимым возбуждением. Обмотка возбуждения питается током, получаемой от постороннего источника, например от аккумуляторной батареи. Ток возбуждения Iзб в этой схеме не зависит от условий работы генератора.

Рисунок. 6.1 Электрическая схема генератора постоянного тока с независимым возбуждением
При разомкнутой внешней цепи ток генератора равна нулю (I0), и вольтметр, подсоединенный к клеммам генератора (до щеток якоря), измеряет ЭДС, индуцированной в якоре .:
![]() (6.1)
(6.1)
где rя – сопротивление обмотки якоря.
Реостат rр в цепи возбуждения позволяет изменять ток возбуждения и тем самым регулировать магнитный поток Ф, а следовательно, и ЭДС Е генератора.
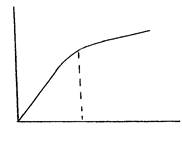
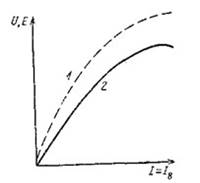
На рисунке представлена характеристика холостого хода генератора. Из-за наличия остаточного магнитного потока в стальном магнитопроводе характеристика холостого хода начинается не с нуля, а с некоторого значения Езал (при Iзб = 0).
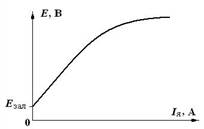
Рисунок. 6.2 Характеристика холостого хода генератора
6.2 Генераторы постоянного тока с параллельным возбуждением
Необходимость постороннего источника для питания обмотки возбуждения усложняет эксплуатацию генератора, в результате чего машины с независимым возбуждением применяются только для специальных целей. В генераторах постоянного тока в большинстве случаев применяют самовозбуждения, то есть питания обмотки возбуждения от якоря самой машины.
Принцип самовозбуждения заключается в следующем. Сначала при вращении якоря остаточный магнитный поток (что всегда имеет место в магнитопроводе машины) приводит в обмотке якоря незначительную ЭДС Езал. Последняя вызывает небольшой ток в обмотке возбуждения. Этот ток усиливает магнитное поле полюсов, что в свою очередь повышает ЭДС, приводится в якоре и увеличивает ток возбуждения. В результате магнитный поток вскоре достигает нормальной величины.
Для обеспечения самовозбуждения необходимо:
- Наличие остаточного магнитного потока в магните;
- Правильное присоединение концов обмотки возбуждения к клеммам якоря, при котором ток возбуждения будет усиливать, а не ослаблять остаточный магнитный поток.
Кроме того, необходимо, чтобы сопротивление цепи возбуждения не превышал определенного для каждой машины значения.
Обмотка возбуждения может быть присоединена к якорю параллельно или последовательно. На практике применяются генераторы с параллельным возбуждением, а также генераторы со смешанным возбуждением, имея две обмотки возбуждения параллельную и последовательную.
На рисунке приведена схема генератора с параллельным возбуждением. Обмотка возбуждения и внешний круг (нагрузка) присоединяются к якорю параллельно. Ток якоря разветвляется по двум параллельным кругах - внешнем и кругу обмотки возбуждения:
Iз = I + Iзб (6.2)
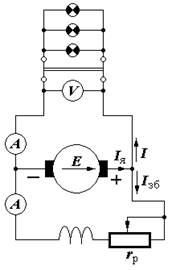
Рисунок 6.3 Схема генератора с параллельным возбуждением
Параллельная обмотка возбуждения выполняется из большого числа витков тонкой проволоки. При этом намагничивая сила, пропорциональная числу ампер-витков, значит достаточной для создания необходимого магнитного потока при сравнительно небольшом токе возбуждения (ток возбуждения составляет 1 - 5% от номинального тока машины).
6.3 Схемы. Принцип действия
Генератор постоянного тока - электрическая машина постоянного тока (генератор), что превращает механическую энергию в электрическую. Действие генератора постоянного тока основывается на явлении электромагнитной индукции: возбуждении переменной ЭДС в обмотке ротора (якоря), при его вращении в основном магнитном поле, создаваемом обмоткой возбуждения на полюсах. Обмотка ротора соединена с коллектором (механическим преобразователем переменного эдс на постоянное напряжение), по пластинам которого скользят контактные щетки, подключая обмотку к внешнему электрической цепи. Различают генераторы постоянного тока с независимым возбуждением (от постороннего источника тока) и с зависимым возбуждением (самовозбуждением), обусловленным остаточным магнетизмом в станине и полюсах. Мощность генераторов постоянного тока - от нескольких ватт до десятков тысяч киловатт, напряжение - от единиц до сотен и тысяч вольт. КПД их при полной нагрузке - от 0,7 (маломощные генераторы) до 0,96 - генераторы большой мощности.
6.4 Характеристики. Использование
Основные величины, характеризующие работу генератора, следующие: напряжение и частота вращения п, ток якоря, ток возбуждения. Конечно характеристики снимают при неизменной частоте вращения.
Характеристика холостого хода - это зависимость при = 0. Эта зависимость фактически кривой намагничивания машины. Она нелинейная, так как при значительных токах возбуждения сталь магнитной системы насыщается. Номинальная точка обычно выбирается на колене характеристики, чтобы, с одной стороны, сталь была использована, а с другой, при значительном насыщении затрудняется регулирования напряжения. По характеристике холостого хода можно судить о правильности изготовления машины.
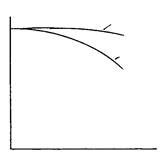
Внешняя характеристика для генератора независимого возбуждения зависимость при неизменном токе возбуждения. С ростом тока нагрузки увеличивается падение напряжения на якоре, что приводит к уменьшению напряжения на выходе. Кроме того, уменьшение напряжения сприичняе действие реакции якоря, что уменьшает суммарный поток в машине, а следовательно и эдс
|
Івн |
U 1 2 |
||||||||||||
|
Рисунок 6.4 Внешняя характеристика |
|
В генераторов равностороннего возбуждения внешняя характеристика снимается при неизменном сопротивлении цепи возбуждения.
Характеристика мягкая, то есть напряжение сильнее падает с ростом нагрузки. Это можно объяснить тем, что в данном генераторе добавляется третья причина - уменьшение тока возбуждения вследствие уменьшения напряжения на якоре.
Генератор смешанного возбуждения позволяет получить желаемую внешнюю характеристику за счет разного включения последовательной обмотки возбуждения.
Генераторы постоянного тока применяют для питания постоянного тока электродвигателей, в сварочных устройствах, электрических установках самолетов, тепловозов, автомобилей, в устройствах автоматики (микрогенераторы постоянного тока), для электролиза и тому подобное.
6.5 Генераторы постоянного тока с последовательным возбуждением
В генератора с последовательным возбуждением обмотка возбуждения соединяется последовательно с якорем; в этом случае обмотку возбуждения называют последовательной обмоткой возбуждения. Ее ток возбуждения равен току якоря.
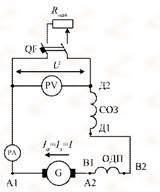
Рисунок 6.5 Генератор с последовательным возбуждением
6.6 Схема. принцип действия
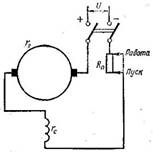
Рисунок 6.6 Схема включения двигателя постоянного тока последовательного возбуждения
6.7 Характеристики.
Использование
Рисунок 6.7 Внешняя характеристика характеристика холостого хода генератора последовательного возбуждения
Так как напряжение генератора последовательного возбуждения сильно меняется с изменением нагрузки, то он не пригоден для питания большинства потребителей и применяется только в некоторых специальных установках.
Контрольные вопросы:
1. Охарактеризуйте схему генератора с независимым возбуждением
2. Охарактеризуйте схему генератора с параллельным возбуждением
3. Принцип действия ГПС
4. Использование ГПС
5. Охарактеризуйте схему генератора постоянного тока с последовательным возбуждением
6. Использование ГПС с последовательным возбуждением
Тема 7. Двигатели постоянного тока (ДПТ)
7.1 Двигатели постоянного тока с параллельным возбуждением
7.1.1 Схемы. Принцип действия
7.2 Двигатели постоянного тока с независимым возбуждением
7.2.1 Схемы. Принцип действия. Характеристики
7.3 Двигатели постоянного тока с последовательным и смешанным возбуждением
7.3.1 Пуск. Торможение
7.3.2 Регулирование частоты вращения
7.1 Двигатели постоянного тока с параллельным возбуждением
Параллельное возбуждения - якорная обмотка и обмотка возбуждения подключены к сети параллельно. Такой двигатель не сильно реагирует на изменение нагрузки, а с тем соответственно имеет жесткую характеристику. Некоторые двигатели с параллельным возбуждением имеют небольшую, на несколько витков, обмотку последовательного возбуждения, которая подключена встречно с параллельной обмоткой, и предназначена для уменьшения реакции якоря.
7.1.1 Схемы. Принцип действия
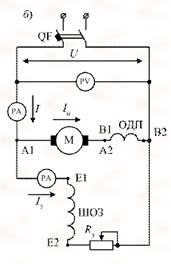
Рисунок.1 Схема двигателя постоянного тока с параллельным возбуждением
В двигателе с последовательным возбуждением ток возбуждения равен току якоря: Iв=Iа , поэтому магнитный поток Ф является функцией тока нагрузки Да. Характер этой функции изменяется в зависимости от величины нагрузки . При Ia <(0,8 ... 0,9) Iном, огда магнитная система ненасыщенная , Ф=кфIа, причем коэффициент пропорциональности Кф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем росте нагрузки поток Ф растет медленнее, чем Ia, и при больших нагрузках (Ia> Iном) можна считать , что Ф = const. В соответствии с этим меняются и в зависимости n=f(Ia), M=f(Ia)
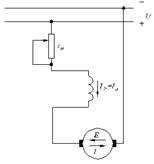
Рисунок. 7.2 1) схема двигателя с последовательным возбуждением; 2) в зависимости его момента и скорости вращения от тока якоря (Iя - ток якоря; Ин - ток возбуждения; rn - сопротивление нагрузки; n - скорость вращения, 1 - естественная характеристика; 2,3 - реостатные характеристики соответствуют разным значениям дополнительного сопротивления rn) .
7.2 Двигатели постоянного тока с независимым возбуждением
Электрический двигатель - это электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
7.2.1 Схемы. Принцип действия. Характеристики
Среди ДПС двигатели с независимым возбуждением наиболее распространенными, а в замкнутых системах управления электроприводами постоянного тока в основном используются только они.
7.3 Двигатели постоянного тока с последовательным и смешанным возбуждением
Последовательное возбуждение - обмотка возбуждения подключена последовательно с якорной обмоткой, и в ней протекает такой же ток, как и в якорной. Такой двигатель имеет мягкую характеристику - сильная реакция на изменение нагрузки. Если снять нагрузку с двигателя, соответственно упадет сила тока в обоих обмотках. Спад тока в обмотке возбуждения приведет к уменьшению ее магнитного потока, и тем самым - к увеличению частоты вращения якоря. При увеличении частоты вращения якоря, противо-ЭДС еще больше уменьшит силу тока в обмотке, и этим еще больше уменьшит магнитный поток обмотки возбуждения. Такой электродвигатель пойдет «вразнос». Поэтому двигатели с последовательным возбуждением должны быть прочно соединены с нагрузкой (рабочим механизмом).
Смешанное возбуждение - такой двигатель имеет две обмотки возбуждения - последовательную и параллельную. Последовательная обмотка может быть подключена встречно или по параллельной обмоткой. Такой двигатель имеет жесткую характеристику чем двигатель с последовательным возбуждением.
7.3.1 Пуск. Торможение
В первый момент пуска, когда якорь неподвижный, пусковой ток будет очень большой из-за низкого сопротивление якорной цепи. Двигатель постоянного тока не выдерживает режима прямого пуска, прежде всего, из-за коммутацию, резко ухудшается. Поэтому при пуске в круг якоря включают пусковой реостат.
- По мере разгона двигателя э.д.с. растет, ток якоря падает, а пусковой реостат постепенно выводят до конца.
- Такой способ пуска имеет значительный недостаток, связанный с наличием потерь энергии в пусковом реостате и поэтому применять его в приводах с частыми пусками невыгодно. В настоящее время нашел применение тиристорно-импульсный способ, который позволяет осуществлять плавный безреостатный пуск изменением среднего значения импульсного напряжения, которое подают на двигатель. Таким образом пуска используется при управлении двигателями транспортных и ряда других подобных средств.
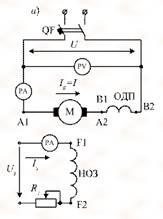
Для осуществления принудительного электрического торможения ЭП двигатель должен быть переведен в генераторный режим работы.
Динамическое торможение ДПС ПО. Этот режим может быть реализован по двум схемам - с независимым возбуждением и с самовозбуждением.
Рисунок 7.4 Характеристики динамического торможения с независимым возбуждением ДПС
Динамическое торможение ДПС с независимым возбуждением реализуется аналогично режиму, рассматриваемом для ДПС НЗ. Характеристики имеют вид прямых 1 - 3, проходящих через начало координат, как показано на рисунке. Как надо, с увеличением R д наклон характеристик к горизонтальной оси увеличивается.
Динамическое торможение с самовозбуждением реализуется в схеме (рисунок 7.5, а) с последовательным соединением обмоток якоря 7, возбуждения 2 и резисторы 3 (резистор может отсутствовать).
Рисунок 7.5 Схема динамического торможения ДПС ПО с самовозбуждением (а) и характеристики (б)
Для возникновения и существования режима самовозбуждения необходимо выполнение следующих условий: наличие остаточного магнитного потока Фост в двигателе; совпадение по направлению Фост и основного магнитного потока Ф, создаваемого током возбуждения; сопротивление цепи обмотки якоря (с учетом сопротивления R д резистора 3) должно быть меньше критического.
Динамическое торможение с самовозбуждением происходит следующим образом. При наличии остаточного магнитного поля и вращении якоря в нем наводится ЭДС, под действием которой по якорю и обмотке возбуждения двигателя начнет протекать ток. Этот ток создает основной магнитный поток Ф, что, совпадая по направлению с остаточным потоком Фост, приведет к увеличению ЭДС. Это, в свою очередь, приведет к увеличению тока в двигателе и таком процессе его самовозбуждения будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.
Универсальные характеристики 1-3 ДПС ПО в этом режиме, соответствующие различным опорам Rя1 <RЛ2 <Rл3, показанные на рисунке.
Торможение противовключением ДПС ПО. Этот режим осуществляется изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в обмотке возбуждения (или наоборот). При этом изменяется знак момента двигателя. Для ограничения тока в этом режиме в цепь якоря 1 вводится дополнительный резистор 2. Схема включения двигателя приведена на рисунке.
Рисунок 7.6 Схема торможения противовключением ДПС ПО (а) и характеристики (б)
К торможению двигатель работал в точке а на характеристике 1, преодолевая момент сопротивления Мс. После указанных переключений и введения в цепь якоря дополнительного резистора RД двигатель переходит на характеристику 2 в точку b. Начинается процесс торможения противовключением, которому соответствует участок bс характеристики 2. В точке с торможение заканчивается (скорость двигателя ω = 0), и схема управления отключает его от сети.
Торможение противовключением также реализуется и в том случае, когда двигатель нагружен активным моментом Мc, что превышает момент короткого замыкания МКЗ.
Предположим, что двигатель в исходном режиме работает в точке а на характеристике 1, преодолевая активное момент нагрузки МС. Если теперь, не меняя полярность напряжения на двигателе, ввести в его якорная цепь дополнительный резистор R д, то двигатель будет иметь характеристику вида 3 и перейдет в точку е этой характеристики. Потому что момент двигателя при этом стал меньше момента нагрузки, то он начнет сначала тормозиться, а затем под действием активного Мс> МКЗ и разгонять в противоположном направлении, пока в точке d моменты нагрузки Мс и двигателя не сравнятся. Двигатель при этом будет работать в режиме торможения противовключением. Такой способ торможения часто используется в ЭП грузоподъемных машин и механизмов.
7.3.2 Регулирование частоты вращения
Регулирование частоты вращения двигателей с последовательным возбуждением, как и двигателей с параллельным возбуждением, возможно тремя способами:
1) изменением потока возбуждения Ф. В двигателей с последовательным возбуждением это можно реализовать включением шунтирующего реостата (Rш) параллельно обмотке возбуждения. При этом магнитный поток будет уменьшаться, а частота вращения - увеличиваться.
2) изменением сопротивления цепи якоря. Включая в круг якоря пусковые реостаты с опорами Rп1, Rп2 и Rп3 кроме естественной характеристики 1 (рисунок 7.6, а) можно получить реостатные характеристики 2, 3 и 4, причем, чем больше значение Rп, тем ниже размещается характеристика, то есть становится "мягкой Если ";
3) изменением напряжения. Как и в двигателях с параллельным возбуждением, это возможно только в направлении уменьшения скорости вращения, так как напряжение относительно номинальной можно только уменьшать. Если на общую нагрузку работают два двигателя, то их можно переключать с параллельного соединения на последовательное. Напряжение на каждом двигателе при этом уменьшается вдвое, соответственно уменьшается и частота вращения.
Контрольные вопросы:
1. Охарактеризуйте двигатели постоянного тока с параллельным возбуждением
2. Какая схема включения двигателя постоянного тока с параллельным возбуждением
3. Охарактеризуйте двигателя постоянного тока с независимым возбуждением
4. Как выглядит схема двигателя постоянного тока с независимым возбуждением
5. Двигатели постоянного тока с последовательным и смешанным возбуждением
6. Пуск и торможение двигателей постоянного тока с последовательным и смешанным возбуждением
7. Регулирование частоты вращения двигателей с последовательным и параллельным возбуждением
Тема 8.Тахогенераторы постоянного тока (на самостоятельную проработку)
8.1 Строение. Принцип действия
8.2 Назначение. Использование
8.1 Строение. Принцип действия
Тахогенераторов (ТГ) называются электрические машины небольшой мощности, предназначенные для преобразования угловой скорости в электрический сигнал. Тахогенераторы представляют собой преобразователи механической энергии в электромагнитную и бывают постоянного и переменного тока.
В тахогенераторов постоянного тока выходное постоянное напряжение прямо пропорциональна угловой скорости. В процессе вращения ротора в поле статора на щеточном контакте возникает постоянное напряжение. Зависимость выходного напряжения тахогенератора от угловой скорости имеет высокую линейность, но при ее нулевом значении не равна нулю, то есть присутствует зона нечувствительности.
Рисунок 8.1 Тахогенератор постоянного тока
8.2 Назначение. Использование
Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какое назначение тахогенераторов
2. С каких составляющих складывается тахогенератор постоянного тока
3. Какой принцип работы тахогенераторов постоянного тока
4.
Недостатки тахогенераторов
постоянного тока
Содержательный модуль 3: ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПЕРЕМЕННОГО ТОКА
Тема 9. Общие сведения о электрические машины переменного тока
9.1 Классификация электрических машин переменного тока в составе электрооборудования станков с ПУ и РТК
9.2 вращающий магнитное поле
9.3 Строение машин переменного тока
9.1 Классификация электрических машин переменного тока в составе электрооборудования станков с ПУ и РТК
Электрические машины переменного тока делятся на синхронные, асинхронные и коллекторные. Наиболее распространены синхронные генераторы и асинхронные двигатели; коллекторные электродвигатели переменного тока позволяют легко осуществить регулирование скорости, в асинхронных электродвигателях затруднительно. Однако из-за высокой стоимости и сложности конструкции коллекторные электродвигатели переменного тока широко не применяются. Электрические машины постоянного тока оборудуются механическим преобразователем - коллектором. Они бывают с последовательным, параллельным, смешанным, а также с независимым возбуждением. Электродвигатели постоянного тока применяют для привода механизмов, требующих плавного регулирования скорости.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. В синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения "синхронная" с частотой тока. Не трудно догадаться, что в асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока.
Кроме разделения на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения.
Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращения ротора происходит с частотой изменения тока.
9.2 Вращая магнитное поле
Вращающееся магнитное поле создается обмоткой статора, состоит из трех катушек. Эти катушки расположены под углом 120 "друг к другу и на них подается трехфазное синусоидальное напряжение. То есть в катушках проходят токи, сдвинутые друг к другу на 120 Можно рассмотреть моменты времени, когда фазные токи достигают максимальных значений. С таблицы видно, что максимальный ток не совпадает по направлению с двумя другими фазными токами.
Три катушки статорной обмотки (начала А, В, С, концы х, у, z) расположены под углом 120 °. Согласно таблице на рисунке изображены направления токов. Если объединить проводники с одинаковым направлением токов, можно изобразить магнитное поле статора. Это поле будет вращаться в соответствии с частотой тока,
![]()
Рисунок 9.1 Вращая магнитное поле
9.3 Строение машин переменного тока
Электрическая машина имеет статор и ротор, разделенные воздушным зазором. Активными частями ее являются магнитопровод и обмотки. Все остальные части - конструктивные, обеспечивающие необходимую жесткость, прочность, возможность вращения, охлаждения и т. П.
Магнитопровод машины, по которому замыкается переменный магнитный поток, выполняют шихтованный - из листов электротехнической стали, как и у трансформатора. Если поток постоянен, то магнитопровод можно выполнять массивным; в этом случае он может осуществлять и конструктивные функции, то есть служить элементом, обеспечивающим прочность данной части машины (статора или ротора).
Так как в частных электрических машин магнитный поток замыкается по сложным контурам, отличным от прямолинейных, в них, как правило, применяется изотронная холоднокатаная сталь. Только для изготовления полюсов синхронных машин и больших машин постоянного тока иногда применяется анизотропная холоднокатаная сталь, так как в полюсах направление магнитных линий совпадает с направлением прокатки, в котором магнитная проницаемость очень велика. Сердечники статоров и роторов асинхронных машин и якорей синхронных машин постоянного тока штампуют из изотронной рулонной холоднокатной стали, что позволяет при раскрое получать экономию около 10-15% по сравнению с листовой, вследствие чего листовая сталь применяется очень редко.
![]()
Рисунок 9.2 Машина переменного тока
1 - статор; 2 - обмотка статора; 3 - воздушный зазор; 4 - ротор; 5 - обмотка ротора; 6 - подшипники; 7 - подшипниковые щиты; 8 - вал ротора; 9 - вентилятор; 10 - станина
Контрольные вопросы:
1.Что такое вращающееся магнитное поле машины переменного тока?
2.Как классифицируют машины переменного тока?
3.Какое строение имеет машина переменного тока?
Тема 10. Асинхронные двигатели
10.1 Принципы действия асинхронных двигателей
10.2 Рабочие характеристики
10.3 Пуск. Торможение
10.4 Регулирование частоты вращения
10.1 Принципы действия асинхронных двигателей
Асинхронный двигатель состоит из неподвижной части - статора и вращающейся части - ротора. На статоре расположена трехфазная обмотка, которая подключается к трехфазной сети, на роторе - обмотка, замкнутая накоротко.
Известно, что токи трехфазной системы катушек при питании от трехфазной сети создают вращающееся магнитное поле, частота вращения которого (в мин.):
![]() .
(10.1)
.
(10.1)
![]() – частота
оборотов поля
– частота
оборотов поля
![]() – частота тока
генератора
– частота тока
генератора
![]() – число пар
полюсов.
– число пар
полюсов.
Вращающееся поле статора при пересечении обмотки ротора будет вводить в ней переменную э Поскольку обмотка ротора замкнута накоротко, то по ней потечет ток. При взаимодействии активной составляющей тока ротора и вращающегося поля возникает крутящий момент. Под действием этого момента ротор будет вращаться. Частота вращения ротора п в двигательном режиме меньше, чем частота вращения поля, так как при синхронном вращении в роторе НЕ БУДЕТ приводится э, НЕ БУДЕТ тока и в обмотке, а потому не будет создаваться и вращающий момент. Поэтому двигатель называется асинхронным. Скольжения S является мерой относительных скоростей поля и ротора
![]() ,
(10.2)
,
(10.2)
где ![]() и
и ![]() – соответственно
скорость и частота вращения поля,
– соответственно
скорость и частота вращения поля,
a ![]() и
и ![]() – соответственно
скорость и частота вращения ротора.
– соответственно
скорость и частота вращения ротора.
10.2 Рабочие характеристики
Нагрузкой двигателя является тормозной момент, приложенный к валу со стороны рабочей машины.
Основные уравнения можно записать, учитывая сходство и различие в работе асинхронного двигателя и трансформатора.
Для круга статора (на одну фазу обмотки):
![]() ,
(10.3)
,
(10.3)
где ![]() – ток статора:
– ток статора:
![]() – индуктивное
сопротивление рассеяния обмотки статора;
– индуктивное
сопротивление рассеяния обмотки статора;
![]() – активное
сопротивление обмотки статора;
– активное
сопротивление обмотки статора; ![]() – эдс, приведенная в обмотке статора основным
потоком:
– эдс, приведенная в обмотке статора основным
потоком:
![]() ,
(10.4)
,
(10.4)
где ![]() – обмоточный
коэффициент, учитывающий, что обмотка статора является распределенной, а также
учитывает конструктивные особенности этой обмотки.
– обмоточный
коэффициент, учитывающий, что обмотка статора является распределенной, а также
учитывает конструктивные особенности этой обмотки.
Вторичная цепь - цепь ротора является коротко замкнутой. Поэтому:
![]() ,
(10.5)
,
(10.5)
где ![]() – ток ротора;
– ток ротора;
![]() – активное
сопротивление обмотки ротора;
– активное
сопротивление обмотки ротора;
![]() – индуктивное
сопротивление рассеяния роторной обмотки;
– индуктивное
сопротивление рассеяния роторной обмотки;
![]() – е.р.с.,
которая индуктируется в обмотке ротора основным потоком.
– е.р.с.,
которая индуктируется в обмотке ротора основным потоком.
Поскольку обмотка ротора
вращается относительно поля со скоростью скольжения, частота ротора ![]() является частота
вращения
является частота
вращения
![]() .
(10.6)
.
(10.6)
Тогда
![]() ,
(10.7)
,
(10.7)
![]() ,
(10.8)
,
(10.8)
 .
(10.9)
.
(10.9)
Если обозначить э.д.с. и
индуктивное сопротивление ротора при скольжении S = 1, то есть при неподвижном
роторе, через ![]() и
и ![]() , то
, то
 .
(10.10)
.
(10.10)
Отсюда можно сделать вывод, что основные размеры, которые характеризуют работу асинхронного двигателя, зависят от скольжения.
10.3 Пуск. Торможение
Управление электрическим двигателем заключается в пуске, регулировании частоты вращения, реверс, создании специальных механических характеристик, торможении.
Реверс асинхронного двигателя (изменение направления вращения) осуществляется изменением направления вращения поля статора с помощью изменения порядка чередования фаз обмотки. Для этого достаточно поменять местами любые два провода, идущие к статора.
Создание специальных механических характеристик при работе асинхронного двигателя простыми способами осуществлять не удастся, поэтому в широкой практике не применяется.
Рассмотрим подробнее пуск и регулирование частоты вращения асинхронных двигателей.
Сначала рассмотрим пуск короткозамкнутых двигателей. Различают прямой пуск - пуск путем непосредственного подключения обмоток статора на полное напряжение сети и пуск от пониженного напряжения. Прямой пуск осуществляется с помощью магнитных пускателей.
Очень существенный недостаток прямого пуска - большой пусковой ток. Он возникает потому, что в первый момент, пока ротор НЕ развернулся, асинхронный двигатель подобный трансформатора в режиме короткого замыкания. Следует отметить, что для асинхронных двигателей малой мощности пусковой ток, как правило, не является опасным, так как за короткое время пуска не происходит недопустимый нагрев обмотки статора большим током. При этом пусковой ток может быть опасен для сети, потому что в ней может наблюдаться недопустимо большое для других потребителей падения напряжения.
Для снижения пускового тока применяют способы пуска при пониженном напряжении. Чаще всего применяют три способа:
1. АВТОТРАНСФОРМАТОРНОЕ. При этом способе пуска сначала асинхронный двигатель подключают к вторичной обмотки понижающего трехфазного автотрансформатора, а после разгона - на полное напряжение сети.
2. Реакторный. Он заключается в том, что в момент пуска последовательно с двигателем в трехлинейный провод включают индуктивные катушки - реакторы. В результате падения напряжения на реакторе напряжение на обмотке статора двигателя уменьшается. После разгона обмотка включается на полную напряжение.
3. Пуск переключением звезда-треугольник. Этот способ пуска применяют, если нормально обмотка статора соединена треугольником. Тогда при пуске она собирается звездой. При этом линейный ток уменьшается в три раза. После пуска обмотку статора соединяют в треугольник.
Существенным недостатком способов пуска от пониженного напряжения является уменьшение пускового момента. Как было сказано ранее, он пропорционален квадрату фазного напряжения. Следовательно, эти способы применимы только для пуска без нагрузки. Кроме того, они более сложные от прямого и требуют наличия дополнительной аппаратуры. Если нужно, применяют короткозамкнутый двигатель при тяжелых условиях пуска в приводе мощных поршневых компрессоров вентилятора. В момент пуска таких асинхронных двигателей происходит увеличение пускового момента и уменьшения пускового тока. По мере разгона частота в роторе уменьшается и двигатель переходит на естественную характеристику. При пуске двигателей с фазным ротором в цепь ротора вводится пусковой реостат. Увеличивается пусковой момент и уменьшается пусковой ток. С разгоном реостат выводят к закорачивания обмотки ротора. Необходимо отметить, что оставлять включенными ступени пускового реостата при работе нельзя, так как пусковой реостат рассчитан на кратковременный режим работы.
10.4 Регулирование частоты вращения
Регулирование частоты вращения асинхронного двигателя осуществляют двумя способами:
1. Изменением частоты сети. Этот метод позволяет плавно регулировать частоту вращения, но требует значительных затрат на использование источника трехфазного напряжения переменной частоты. Ранее для этой цели применяли каскад электрических машин. В настоящее время используют полупроводниковые тиристорные преобразователи частоты.
2. Изменение числа пар полюсов. В настоящее время двигатели с таким способом регулирования частоты фактически не встречаются на практике. Из вышеизложенного в п.2.5.2 ясно, что для асинхронных двигателей нет способа регулирования частоты вращения, который бы удовлетворял всем требованиям плавности, широты диапазона регулирования, экономичности.
Контрольные вопросы:
1. Из чего состоит асинхронный двигатель?
2. Принцип действия асинхронного двигателя
3. Рабочие характеристики асинхронного двигателя
4. Пуск асинхронных двигателей
5. Торможение асинхронных двигателей
6. Регулирование частоты вращения
Тема 11. Синхронные машины переменного тока (на самостоятельную проработку)
11.1 Классификация. Назначение
11.2 Устройство и принцип действия синхронных машин переменного тока
11.1 Классификация. Назначение
Синхронные машины сегодня мало применяются в производстве. Поэтому здесь даются только общие сведения о них.
Синхронной машиной называется потому, что ее ротор вращается с одинаковой скоростью с вращающимся полем статора (то есть синхронно). Она имеет статор, устроен так же, как статор асинхронного двигателя. На статоре расположена трехфазная обмотка. В отличие от асинхронного двигателя ротор синхронной машины активный - на роторе расположена обмотка возбуждения, питается постоянным током.
11.2 Устройство и принцип действия синхронных машин переменного тока
Синхронные генераторы применяют на электростанциях как устройства, преобразующие механическую энергию, получаемую от первичного двигателя (турбины, двигателя внутреннего сгорания), в электрическую.
Почти вся электроэнергия в мире производится синхронными генераторами. Принцип действия синхронного генератора прост. При вращении от первичного двигателя возбужденного ротора поле ротора пересекает витки статорной обмотки и приводит в ней э Пространственное сдвиги обмоток различных фаз приводит к временному сдвигу э в фазах обмотки. Так образуется трехфазная система ЭДС
Конструктивно синхронные машины могут быть выполнены с явно и неявно выраженными полюсами ротора.
Это делается для того, чтобы увеличить надежность электроснабжения, уменьшить нужен резерв, улучшить возможности маневрирования электроэнергией. Известно, что для этих целей электросети объединяются в энергосистемы. Поэтому мощность сети, на которой работает генератор, обычно значительно больше мощности данного генератора.
Поскольку частота сети определяется всеми генераторами, при включении данного генератора на параллельную работу с сетью необходимо выполнить ряд условий для его синхронизации.
Регулирование нагрузки (активной мощности, отдаваемой в сеть) параллельно работающего генератора осуществляется изменением момента на валу за счет приводного двигателя. Важным свойством синхронной машины при параллельной работе с сетью является возможность регулирования коэффициента мощности путем изменения тока возбуждения.
Синхронные генераторы выпускаются большой единичной мощности - в сотни тысяч и даже более одного миллиона киловатт. Это связано с тем, что чем выше мощность машины в единице, тем выше ее КПД и меньше материалоемкость.
Синхронные двигатели применяют значительно меньше асинхронных через их недостатки: сложное строение, очень сложный пуск. В то же время, синхронные двигатели отличаются абсолютно жесткой механической характеристикой (частота вращения определяется частотой сети и числом пар полюсов), а также возможностью регулирования коэффициента мощности. Причем в синхронных двигателях можно установить опережающий, то есть компенсировать с его помощью коэффициент мощности других потребителей.
Находят применение синхронные двигатели и в системах автоматики (микродвигатели).
Контрольные вопросы
1. Что такое синхронная машина переменного тока?
2. Где применяются синхронные машины?
3.
принцип действия
Тема 12. Шаговые двигатели (на самостоятельную
проработку)
12.1 Назначение. Строение
12.2 Принцип действия и характеристики шаговых двигателей
12.1 Назначение. Строение
Шаговый двигатель - это исполнительный привод многих современных аппаратов: станков, приводов, автоматов. Шаговый двигатель в паре со специальным блоком управления призван превращать входной электрический сигнал в механическое перемещение ротора - определенный угол, называемый также основным угловым шагом двигателя.
Преимущества и недостатки шаговых двигателей
Шаговые двигатели имеют существенные преимущества: во-первых, это отсутствие обратной связи, которая обычно используется для управления положением или частотой вращения, во-вторых, не происходит накопления ошибки положения ротора двигателя, в-третьих, шаговые приводы совместимы с современными цифровыми устройствами .
Отсутствие обратной связи можно отнести как к достоинствам, так как система значительно упрощается, так и к недостаткам - потому что возможна потеря положения.
К недостаткам шаговых двигателей относят и явление резонанса. Однако, это кому недостаток в значительной степени устраняется дроблением основного шага двигателя.
Области применения шаговых двигателей
Шаговые двигатели благодаря простоте и невысокой стоимости распространены в станках ЧПУ, координатных столах, робототехнике, при автоматизации технологических процессов - в устройствах подачи, дозирования, сварочных автоматах.
Шаговые двигатели распространены в станках с ЧПУ и координатных столах. Доступность и невысокая стоимость программного обеспечения (CNC-программы), простота применения делают использование шагового привода в этих устройствах наиболее приемлемым и экономичным вариантом. Для управления двигателями в таких случаях используются драйверы, которые подключаются непосредственно к LPT-порту компьютера и принимается от пинов данных порта сигналы 0В / 5В, генерируемые программой. Программа устанавливает скорость двигателя, направление, величину перемещения (или траекторию - если происходит управление одновременно двумя и более шаговыми приводами).
12.2 Принцип действия и характеристики шаговых двигателей
По принципу действия шаговый двигатель относится к двигателям синхронного типа: в нем существует связь между сигналом питания и положением ротора двигателя.
На данный момент распространены и повсеместно применяются гибридные шаговые двигатели, которые обладают достоинствами двигателей с постоянными магнитами и синхронных реактивных двигателей с переменным магнитным сопротивлением. Гибридные шаговые двигатели имеют крутящий момент, пропорциональный току, и характеризуются большим числом шагов на оборот. Управление шаговым двигателем
Шаговые двигатели работают в паре со специальными блоками управления, которые являются источником тока для двигателя, осуществляют при необходимости дробления основного углового шага и выполняют коммутацию фаз двигателя.
Современные блоки управления часто являются многофункциональными устройствами - с возможностью программирования и синхронизации с другими устройствами. Пример программируемого блока управления - SMSD-3.0, разработанного компанией «НПФ Электропривод». Такой блок может управляться от компьютера через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт - получая специальные команды, определяющие характер (и алгоритм) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (применяется при автоматизации технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения - датчиком реверса.
Контрольные вопросы
1. Какой двигатель называется шаговым?
2. Назовите принцип действия шаговых двигателей
3. Строение шаговых двигателей
4. Какие преимущества и недостатки имеют шаговые двигатели?
5. Где используют шаговые двигатели?
Тема 13. Тахогенераторы переменного тока (на самостоятельную проработку)
13.1 Строение. Принцип действия
13.2 Назначение. Использование
13.1 Строение. Принцип действия
В тахогенератора используется классический принцип электромагнитной индукции, а конструкция их приспособлена для неограниченного вращения. Все тахогенераторы представляют собой электрические машины, содержащих статор и ротор. Видов тахогенераторов разработано много, поэтому рационально ввести их классификацию:
- Тахогенераторы постоянного тока;
- Тахогенераторы переменного тока
- Синхронные тахогенераторы;
- Асинхронные тахогенераторы;
- Индукторной тахогенераторы.
13.2 Назначение. Использование
По назначению тахогенераторы можно подразделить на три основные группы:
1) тахогенераторы как указатели скорости. Могут использоваться наименее точные тахогенераторы постоянного и переменного тока;
2) тахогенераторы как датчики ускоряющих и замедляющих сигналов обратной связи в системах автоматического регулирования и как элементы системы стабилизации скорости вращения. Допускается использовать тахогенераторы постоянного тока и асинхронные классов точности 0,5-ь1;
3) тахогенераторы как элементы автоматических вычислительных устройств для решения задач дифференцировки и интеграции функций. Используются тахогенераторы постоянного тока и асинхронные высоких классов точности 0,05 ч-0, 2.
Контрольные вопросы
1. Строение тахогенератора
2. Как классифицируют тахогенераторы?
3.
Где используют тахогенераторы
переменного тока?
БЛОК 2-ПП 03.07.02 электрооборудования станка С
ПУ И РТК
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 4: НАЗНАЧЕНИЕ И СОСТАВ электрооборудования станка С ПУ И РТК
Тема 14. Общие сведения о назначении и состав электрооборудования станков с ЧПУ и РТК
14.1. Основные термины и определения
14.2. Основные виды электрооборудования
14.3. Виды электрических схем электрооборудования
14.1. Основные термины и определения
Электропривод - электромеханическая система, состоящая из преобразовательного, электродвижущего, передающего и управляющего устройств и предназначена для приведения в движение исполнительного органа рабочей машины и управления этим движением.
На структурной схеме показано составные части электропривода и их взаимосвязь.
Питание электрической энергией осуществляется от источника питания (ИП) (например, генератора или сети постоянного или переменного тока).
Преобразовательный устройство (ЧПр) может: повышать и / или понижать напряжение (например, трансформатор, автотрансформатор), превращать переменное напряжение на постоянную (например, полупроводниковый выпрямитель) или постоянную на переменную (например, инвертор), изменять частоту тока (тиристорный преобразователь частоты) , изменять показатели качества электрической энергии (например, стабилизатор).
Преобразовательный устройство не является обязательной составной частью электропривода. Он может отсутствовать, если электрические параметры источника питания и электродвижущего устройства согласованы и их не нужно менять в процессе работы электропривода.
![]()
Рисунок 14.1. Структурная схема электропривода
Электродвигательное устройство (ЭДУ) предназначено для преобразования электрической энергии в механическую или механической в электрическую. Его функции могут выполнять, например, электромагниты и электродвигатели постоянного и переменного токов, которых может быть несколько в составе одного электропривода.
Электродвижущее устройство является обязательной составной частью электропривода.
Передающее устройство (ПП) предназначен для передачи механической энергии от электродвижущего устройства в исполнительный органа (ВО) рабочей машины, и согласование вида и скоростей их движения. Например, при необходимости уменьшения или увеличения скорости вращения функцию передаточного устройства могут выполнять редукторы, ременные и цепные передачи и др., А при необходимости преобразования вращательного движения в поступательное эту функцию выполняют передача «винт-гайка», кривошипно-шатунный механизм и др.
Передающее устройство не является обязательной составной частью электропривода и может отсутствовать, если скорость и вид движения подвижной части электродвижущего и передающего устройств согласованы.
Управляющее устройство (УУ) - это электротехническое устройство, предназначенное для управления одним, несколькими или всеми вышеупомянутыми устройствами. Цель такого управления может быть разной. Например, изменяя сигнал управления Р3ел, можно изменять напряжение или частоту на выходе преобразовательного устройства и тем самым увеличивать или уменьшать скорость вращения электродвигателя, или же, наоборот, поддерживать скорость постоянной при изменении нагрузки. С помощью сигнала Р5ел можно изменять, например, количество пар полюсов электродвигателя и тем самым ступенчато изменять скорость его вращения. С помощью сигнала Р6еч меняется, например, передаточное отношение передающего устройства.
Управляющее устройство является обязательной составной частью электропривода и может быть простым и выполнять только функцию «включить-выключить» или очень сложным, выполняя функцию автоматического управления работой электропривода во всех режимах работы, а также функции защиты, сигнализации и др.
Механическая энергия от передающего устройства передастся исполнительному органу рабочей машины.
Рабочая машина - это машина, которая осуществляет изменение формы, свойств, состояния или положения предмета труда (например, насосы, вентиляторы, компрессоры, конвейеры, станки и др.).
Исполнительный орган (ВО) рабочей машины - это элемент рабочей машины, который перемещается и выполняет рабочую операцию (например, поршень или рабочее колесо насоса, лента или цепь конвейера, суппорт станка и др.).
14.2 Основные виды электрооборудования
Групповой электропривод – электропривод, который обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины.
Индивидуальный электропривод – электропривод, который обеспечивает движение только одного исполнительного органа рабочей машины.
Электропривод постоянного тока – электропривод с электродвигательным прибором постоянного тока.
Реверсивный электропривод – электропривод, который обеспечивает движение электродвигательного прибора в противоположных направлениях.
Нереверсивный электропривод – электропривод, который обеспечивает движение электродвигательного прибора только в одном направлении.
.
14.3 Виды электрических схем электрооборудования
Для пояснения работы электропривода используют электрические схемы разных типов.
Структурная схема определяет основные функциональные составные части электропривода, их назначения и взаимосвязь между ними. Такие схемы исполняют на первой стадии проектирования и используются для общего ознакомления и согласования состава основных частей электропривода
Функциональная схема, кроме информации, которую дает структурная схема, поясняющая процессы, происходящие в отдельных составных частных электропривода. Такие схемы используются для изучения принципа действия электропривода.
Рассмотрим функциональную схему, которая представлена на рисунке 14.2. Источником питания такой схемы является сеть переменного синусоидального тока напряжением 380 В и частотой 50 Гц. Функцию преобразовательного устройства выполняет тиристорный преобразователь частоты, который имеет диапазон изменения частоты напряжения на выходе от 45 до 55 Гц.
Функцию электродвигательного устройства выполняет трехфазный асинхронный двигатель с двумя степенями синхронной скорости :1500 и 1000 об. / Мин. Функцию передающего устройства выполняет редуктор с передаточным отношением и - 2,5. Управляющее устройство управляет работой превращающего и электродвигательного устройств.
Принципиальная (полная) схема определяет полный состав элементов и связей между ними и дает полное и детальное представление о принципе работы электропривода во всех без исключения режимах работы. Такие схемы является основой для разработки конструкторской документации на всю рабочую машину.
![]()
Рисунок 14.2. Функциональная схема электропривода
При черчении принципиальных электрических схем используют условные графические изображения элементов, основные из которых приведены в приложении А.
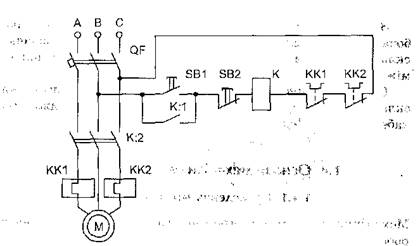
Рисунок 14.3. Принципиальная схема нереверсивного электропривода
В качестве примера рассмотрим схему, изображенную на рисунке 14.3. Питание схемы обеспечивается источником трехфазной напряжения (А, В, С). Потребителем электрической энергии является асинхронный двигатель с короткозамкнутым ротором М, который выполняет функцию электродвигательного устройства электропривода.
В состав управляющего устройства входят такие электрические аппараты: автоматический выключатель QF, контактор (на схеме показанные его катушка К, вспомогательный К 1 и силовые К 2 контакты), кнопки «Пуск» (8В1) и «Стоп» ( 8В2) и реле электро-тепловые УК1 и КК2 (на схеме показаны их воспринимающие элементы и контакты).
Схема электрических соединений (монтажная) показывает связи между элементами, из чего они выполнены (проволока, жгут, кабель и др.), а также места их соединения и ввода. Эти схемы используются при разработке конструкторской документации и, в первую очередь, конструкторских чертежей, определяющие размещение и способы крепления проводов, жгутов, кабелей и др. По таким схемам выполняют электромонтажные работы в рабочих машинах.
Схемы подключения показывают внешнее электрическое подключения рабочей машины.
Общая схема. Эту схему используют тогда, когда рабочая машина является составной частью комплекса и определяет составные части этого комплекса и электрические соединения между ними.
Схема расположения определяет относительное расположение составных частей рабочей машины, а также проводов, жгутов, кабелей, их соединяют.
Контрольные вопросы:
1. Из каких основных элементов состоит электропривод рабочей машины и каково его назначение?
2. Что имеют общего и чем отличаются структурная и функциональная электрические схемы?
3. Какую информацию дают принципиальные электрические схемы?
4.
Проанализируйте электрические
схемы соединений, подключений, общую схему и схему размещений.
Тема 15. Электромагнитные реле постоянного и
переменного тока
15.1. Электромагнитные релейные исполнительные механизмы.
15.2. Принцип действия реле
15.3. Принципом действия реле переменного тока
15.4. Мощные контакторы и магнитные пускатели переменного тока
15.1 Электромагнитные релейные исполнительные механизмы
Из группы РВМ наибольшее распространение получили электромагнитные реле. Они подразделяются на реле постоянного и реле переменного тока. Реле постоянного тока, в свою очередь, подразделяются на нейтральные и поляризованные.
Нейтральные электромагнитные реле одинаково реагируют на полярность входного сигнала постоянного тока (т.е. положение якоря не зависит от направления тока в обмотке реле). Поляризованное реле реагирует на полярность входного сигнала.
По характеру движения якоря электромагнитные нейтральные реле подразделяются на два типа: с поворотным якорем и с втяжные якорем.
Конечно сердечник обеспечивается полюсными наконечниками, уменьшает магнитное сопротивление рабочего воздушного зазора.
При отсутствии управляющего сигнала якорь удален от сердечника на максимальное расстояние за счет возвратной пружины. В этом случае одна пара контактов замкнута (РК - размыкающие контакты), а другая пара - разомкнута (ЗК - замыкающие контакты).
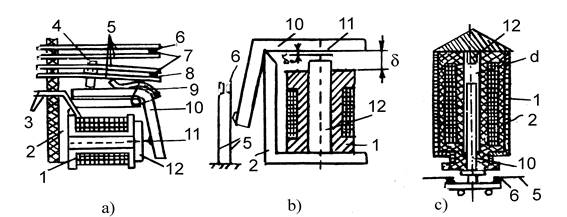
Рисунок 15.1 Схемы электромагнитных реле: а b - клапанного типа; c - с якорем, втягивается внутрь катушки; 1 - каркас с обмоткой; 2 - ярмо; 3 - выводы обмотки; 4 - колодка; 5 - контактные пружины; 6 - замыкающий контакт, ЗК; 7 - подвижные контакты; 8 - контакт, РК, размыкается; 9 - возвратная пружина; 10 - якорь; 11 - штифт отлипания; 12 – сердечник
15.2. Принцип действия реле
Принцип действия реле основан на следующем: при подаче тока в обмотку (катушку) создается магнитный поток, проходя через сердечник, ярмо, якорь и воздушный зазор d создает магнитное (тяговое) усилие, притягивает якорь к сердечнику. При этом якорь, воздействуя на колодку, перемещает ее таким образом, что контакты ЗК замыкаются, а РК - размыкаются.
Таким образом электромагнитное реле состоит из трех основных частей: контактной системы, выполненной из материала нейзильбера, магнитопровода (ярмо, сердечник, якорь), выполненные из мягкой стали, и обмотки (катушки). Магнитную цепь составляют сердечник, якорь, ярмо и воздушный зазор между якорем и сердечником.
Перемещение якоря электромагнитного реле происходит под действием двух сил: силы тяги, обусловленной электромагнитным полем и противодействующей силы, обусловленной упругой деформацией пружин. Обе эти силы зависят от перемещения якоря, то есть от величины зазора между якорем и сердечником.
Зависимость между
электромагнитной силой тяги Fе и величине зазора называется тяговой
характеристикой реле![]() . Зависимость между противодействующей
силой Fм и величине зазора называется механической характеристикой реле
. Зависимость между противодействующей
силой Fм и величине зазора называется механической характеристикой реле ![]() .
.
Значение электромагнитной
силы при изменении воздушного зазора описывается уравнением
(15.1)
Отсюда следует, что электромагнитное (тяговое) усилие (сила притяжения) прямо пропорционально квадрату магнитодвижущей силы (I * W), то есть не зависит от направления тока в управляющей обмотке, и обратно пропорционально квадрату длины воздушного зазора (d2).
Тяговая характеристика представляет собой гиперболу (теоретическая характеристика уходит в бесконечность при d = 0, однако практически эта характеристика отличается от гиперболы, что объясняется некоторой приближенностью формулы, не учитывает магнитное сопротивление стальных элементов магнитопровода (сердечника, ярма и якоря).
Части магнитопровода реле
после отключения обмотки питания сохраняют некоторое намагничивания,
обусловленное коэрцитивной силой. Это намагничивания при![]() может создавать
тяговое усилие, достаточное для удержания якоря в привлеченному состоянии.
Может произойти так называемое "залипание" якоря. Для исключения
"залипания" на вертикальной части якоря против оси сердечника
закрепляется штифт (наклепом или прокладки) из немагнитного материала. При
привлеченному якоре, благодаря наличию штифта,
может создавать
тяговое усилие, достаточное для удержания якоря в привлеченному состоянии.
Может произойти так называемое "залипание" якоря. Для исключения
"залипания" на вертикальной части якоря против оси сердечника
закрепляется штифт (наклепом или прокладки) из немагнитного материала. При
привлеченному якоре, благодаря наличию штифта,
15.3. Принцип действия реле переменного тока
По принципу действия реле переменного тока ничем не отличается от электромагнитного реле постоянного тока. Это объясняется тем, что тяговое усилие пропорционально квадрату намагничивая силы, и не зависит от направления тока. Поэтому, хотя переменный ток периодически меняет свое направление, знак тягового усилия не будет зависеть от направления тока, оставаясь неизменным.
Электромагнитная сила, создаваемая обмоткой реле переменного тока равна
 (15.2)
(15.2)
где  - максимальное амплитудное
значение электромагнитной силы, создаваемый катушкой реле.
- максимальное амплитудное
значение электромагнитной силы, создаваемый катушкой реле.
Рисунок 15.2 Изменение тока и характеристика реле переменного тока
Как видно из этой формулы,
тяговое усилие колеблется с двойной частотой ![]() и не меняет своего знака,
но дважды за период питающего напряжения обращается в нуль. Итак, якорь реле
может вибрировать, периодически втягиваться от
сердечника противодействующей пружиной, вызывает дрожь якоря и, как следствие,
быстрый износ контактов.
и не меняет своего знака,
но дважды за период питающего напряжения обращается в нуль. Итак, якорь реле
может вибрировать, периодически втягиваться от
сердечника противодействующей пружиной, вызывает дрожь якоря и, как следствие,
быстрый износ контактов.
Для устранения этого недостатка применяют три способа:
Применение более тяжелого якоря.
Более тяжелый якорь благодаря
большой инерции не может вибрировать с удвоенной частотой (![]() ), то есть он не
успевает отходить от сердечника в те моменты времени, когда ток в обмотке реле
переходит через ноль. Вибрация якоря в этом случае уменьшается. Однако
применение более тяжелого якоря вызывает увеличение его размеров, приводит к
уменьшению чувствительности реле, кроме того, габариты, вес и стоимость реле
увеличиваются. Значительно ухудшаются временные параметры реле.
), то есть он не
успевает отходить от сердечника в те моменты времени, когда ток в обмотке реле
переходит через ноль. Вибрация якоря в этом случае уменьшается. Однако
применение более тяжелого якоря вызывает увеличение его размеров, приводит к
уменьшению чувствительности реле, кроме того, габариты, вес и стоимость реле
увеличиваются. Значительно ухудшаются временные параметры реле.
Применение двухфазного реле.
Двухфазное реле имеет две
обмотки, расположенные на двух сердечниках, имеющих общий якорь. Обмотки реле
соединены параллельно относительно друг друга. В цепь одной из обмоток включен
конденсатор С, благодаря чему токи в обмотках реле будут сдвинуты по фазе на
угол ![]() .
Следовательно, и сжимающие усилия развивающихся обмотками будут также сдвинуты
по фазе на 90
.
Следовательно, и сжимающие усилия развивающихся обмотками будут также сдвинуты
по фазе на 90![]() . Это значит, что в момент, когда тяговое
усилие, развиваемое одной обмоткой равна нулю, то тяговое усилие, развиваемое
другой обмоткой в этот момент будет иметь максимальное значение. Поэтому в
. Это значит, что в момент, когда тяговое
усилие, развиваемое одной обмоткой равна нулю, то тяговое усилие, развиваемое
другой обмоткой в этот момент будет иметь максимальное значение. Поэтому в
любой момент времени результирующее усилия не будет равна нулю, то есть
![]()
Конечно магнитные потоки развивающихся обмоткой реле, уровне.
Тогда ![]() , а
результирующее усилия равна
, а
результирующее усилия равна
![]() (15.3)
(15.3)
Применение короткозамкнутого витка.
Короткозамкнутый виток (экран) охватывает часть конца сердечника (расщепленный сердечник) и является наиболее эффективным способом устранения явления дребезга контактов в реле переменного тока.
На рис. изображена схема реле переменного тока с короткозамкнутым витком. Конец сердечника, обращенный к якорю, расщепленный (пропилен) на две части, в одну из которых надета короткозамкнутая обмотка - экран С (один или несколько витков). Магнитопровод выполняют из отдельных листов для уменьшения потерь.
Принцип работы реле заключается в следующем. Переменный магнитный поток Фонд основной обмотки W обм, проходя через разрезанную часть сердечника, делится на две части. Часть потока Ф1 проходит через экранированную половину полюса сердечника S2, в которой размещается короткозамкнутая обмотка (экран), а другая часть потока Ф1 проходит через.
Рисунок.15.3 Реле переменного тока с короткозамкнутым витком
неэкранированную половину
полюса приятным S1. Поток Ф2 приводит в короткозамкнутой развития э (eкз), что
создает ток Iкз (на рисунке 15.3, б разрез паза показан в увеличенном
масштабе). При этом возникает еще один магнитный поток ФКЗ, что влияет на
магнитный поток Ф2 и вызывает отставание этого потока по фазе относительно
потока Ф1 на угол φ = 60 ... 80![]() . Благодаря этому результирующее тяговое
усилие Fз никогда не доходит до нуля, так как оба потока проходят через ноль в
разные моменты времени.
. Благодаря этому результирующее тяговое
усилие Fз никогда не доходит до нуля, так как оба потока проходят через ноль в
разные моменты времени.
Результирующее тяговое усилие, создаваемое двумя
потоками, равна
![]()
![]() (15.4)
(15.4)
Для полного устранения переменной составляющей тягового усилия необходимо выполнить следующие условия
1) чтобы ![]() , то есть
, то есть ![]() ;
;
2) чтобы фазовый угол между ![]() между
потоками Ф1 и Ф2 равен
между
потоками Ф1 и Ф2 равен ![]() .
.
Последнее
условие выполнить невозможно из-за наличия активных потерь в короткозамкнутой
развития (сопротивление короткозамкнутого витка не может равняться нулю).
Практически фазовый сдвиг ![]() может достигать 60-80
может достигать 60-80![]() и,
следовательно, тяговое усилие содержит переменную составляющую, но в меньших
пределах, чем в реле, не имеет короткозамкнутой обмотки и расщепленного
сердечника. Среднее тяговое усилие Fесер при наличии экрана меньше тягового
усилия Fеoсер без экрана. Кроме того, для надежной работы реле необходимо,
чтобы минимальное усилие Fеmin было больше, потому что именно это усилие
определяет допустимую нагрузку реле без вибрации. Размер Fеmin зависит от степени
охвата сердечника короткозамкнутой обмотки и других факторов. Опытным путем
установлено, что самые выгодные параметры короткозамкнутой обмотки могут быть
получены при условии, если площадь поперечного сечения экранированного полюса
будет в два раза больше площади поперечного сечения неэкранированного полюса,
то есть S2 = 2 * S1.
и,
следовательно, тяговое усилие содержит переменную составляющую, но в меньших
пределах, чем в реле, не имеет короткозамкнутой обмотки и расщепленного
сердечника. Среднее тяговое усилие Fесер при наличии экрана меньше тягового
усилия Fеoсер без экрана. Кроме того, для надежной работы реле необходимо,
чтобы минимальное усилие Fеmin было больше, потому что именно это усилие
определяет допустимую нагрузку реле без вибрации. Размер Fеmin зависит от степени
охвата сердечника короткозамкнутой обмотки и других факторов. Опытным путем
установлено, что самые выгодные параметры короткозамкнутой обмотки могут быть
получены при условии, если площадь поперечного сечения экранированного полюса
будет в два раза больше площади поперечного сечения неэкранированного полюса,
то есть S2 = 2 * S1.
Следует отметить, что реле переменного тока по ряду параметров уступают реле постоянного тока. Анализ работы реле переменного тока показывает, что они при одинаковых размерах с реле постоянного тока развивают меньше тяговое усилие. Или, другими словами, при одинаковых развиваемых тяговых усилиях, реле переменного тока имеет большие габариты. Реле переменного тока имеет меньшую чувствительность, сложнее и дороже, поскольку нужно иметь шихтованный магнитопровод (набранный из отдельных листов). Необходимость применения специальных мер для устранения вибраций якоря еще более усложняет их конструкцию.
Реле переменного тока получили широкое распространение в энергоснабжении и системах сельскохозяйственной автоматики. Основное их преимущество - не требуется дополнительных устройств по выпрямлению тока с переменного в постоянный.
Электромагнитные реле, которые применяются в качестве РВМ в цепях постоянного и переменного токов, называются соответственно контакторами и магнитными пускателями. Они предназначены для коммутации мощных силовых цепей (при токах нагрузки несколько ампер и более). Как правило, род тока в цепях управления РВМ совпадает с родом тока в силовой цепи их контактов.
Для интенсивного гашения электрической дуги контакторы постоянного тока обеспечиваются дугогасительными камерами. На рис. показана схема контактора постоянного тока и дугогасительная камера с узкой щелью и магнитным дутьем.
![]()
Рисунок. 15.4 Схема контактора постоянного тока - а) и дугогасительной камеры с магнитным дутьем - б)
Щелевая камера образована двумя стенками 1, выполненными из изоляционного материала. Зазор между ними сужен до узкой щели. Ее ширина чуть меньше диаметра электрической дуги. Магнитное дутье необходимое для создания электродинамических сил гашение электрической дуги. При этом в результате взаимодействия электрического тока дуги с магнитным полем появляется сила F, под действием которой дуга растягивается и перемещается в узкую щель, где она гаснет за счет усиленного отвода тепла стенками камеры. Система магнитного дутья состоит из катушки 4, включенной последовательно с главными контактами и оборудованной сердечником 3. Для отвода магнитного потока в область горения электрической дуги используются ферромагнитные щечки 2. Иногда применяют щелевые камеры с зигзагообразной щелью, что обеспечивает улучшенный теплоотвод.
При последовательном включении контакта и катушки магнитного дутья электродинамические силы не меняют своего направления при любом направлении тока 1 в главной цепи. Это позволяет использовать магнитное дутье не только в цепях постоянного, но и в цепях переменного тока.
Как в цепях постоянного, так и переменного тока для гашения дуги широко применяются камеры с дугогасящие решеткой. Дугогасительная решетка представляет собой пакет тонких металлических пластин. Под действием электродинамических сил, создаваемых системой магнитного дутья, электрическая дуга попадает на решетку и рвется на ряд коротких дуг. Пластины решетки интенсивно отводят тепло от дуги и тушат ее. Однако, пластины дугогасительной решетки обладают значительной термической инерционностью - при большой частоте включений РВМ они перегреваются и эффективность дугогашения падает.
15.4 Мощные контакторы и магнитные пускатели переменного тока
Мощные контакторы и магнитные пускатели переменного тока имеют главные контакты, оборудованы системой дугогашения - магнитным дутьем и дугогасящие камерой с узкой щелью или дугогасящие решеткой, как и контакторы постоянного тока. Конструктивное отличие состоит в том, что устройства переменного тока выполняют многополюсными; обычно они имеют три главных замыкающих силовых контакты. Все три контактных узлы работают от общего электромагнитного привода клапанного типа, возвращает вал РВМ с установленными на нем подвижными контактами. На том же валу устанавливают вспомогательные переключающие контакты.
Для переменного тока магнитные пускатели используют при коммутации цепей мощностью до 75 кВт напряжением до 500 В. Для коммутации цепей мощностью более 75 кВт используют контакторы.
По значениям тока и напряжения силовых контактов магнитные пускатели выбирают
 (15.5)
(15.5)
где Iном - номинальный ток контактов; Iроб - наибольший ток нагрузки; Uап - коммутирующая напряжение контактов; Uсети - рабочее напряжение нагрузки; Uкат - напряжение питания катушки пускателя; Uц.упр - напряжение питания цепей управления; причем значение номинального тока берется ближайшее по величине к рабочему тока коммутируемого нагрузки.
.
Контрольные вопросы:
1. Что общего имеют и чем отличаются по конструкции и принципу действия контакторы постоянного и переменного токов?
2. На какие типы подразделяют электромагнитные нейтральные реле?
3. Охарактеризуйте принцип действия реле.
4. Чему равна электромагнитная сила, создаваемая обмоткой реле переменного тока?
Тема 16. Аппараты ручного управления (на самостоятельную проработку)
16.1 Аппараты ручного управления.
Ручное управление применяют в простых случаях неавтоматизированного производства и только для приводов, установленных в помещениях с нормальными оператора условиями работы, при управлении которыми не возникает опасности поражения электрическим током, не требуется больших физических усилий, быстродействия, большого количества операций.
Аппараты ручного управления приводятся в действие непосредственно усилием оператора. К ним относятся рубильники, пакетные выключатели, реостаты, контролеры.
Рубильники - аппараты для ручного включения и отключения элементов электрических цепей. Их применяют при напряжениях до 500 В и токах до 1000 А. Для отключения цепей без нагрузки служат простые рубильники без дугогасящие приспособления, а для отключения цепей под нагрузкой применяют рубильники с дугогасительными приспособлениями. Самым простым из них является особый дугогасящий контакт, который крепится на основном контакте. Дугогасящий эффект достигается тем, что размыкание цепи происходит быстро под действием пружины растягивается при размыкании основного контакта. В цепях переменного тока с напряжением 380 и 500 В и постоянного тока при напряжении 200 В и более применяют рубильники с дугогасительными камерами.
Пакетные выключатели - малогабаритные аппараты для ручного включения и выключения электрических цепей постоянного и переменного токов. Их применяют при напряжении 220 и 380 В и токах от 10 до 400 А.
В контактную систему пакетного выключателя входит набор контактных групп. Каждая группа состоит из двух неподвижных контактов 3, укрепленных на неподвижных изоляционных шайбах 2, и подвижного контакта 4, что насажен на четырехгранный валик с ручкой 5.
Неподвижные контакты имеют зажимы, к ним присоединяют провод электрической цепи. В определенном положении ручки подвижный контакт соединяет между собой два неподвижных контакты, расположенных на одном диаметре, то есть соединяют два провода электрической цепи в соответствии с заданной схемы. При повороте ручки на 90 ° возвращается также подвижный контакт и эта цепь разрывается. Для ускорения разрыва под крышкой 1 имеется пружинный механизм. При повороте ручки пружина заводится, а затем возвращает подвижной контакт.
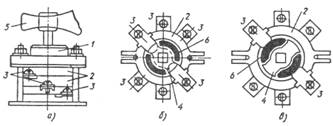
Рисунок 16.1 Пакетные выключатели
Электрическая искра, возникает между контактами при разрыве цепи, гасится не только путем ускорения разрыва; этому способствуют также газы, выделяемые фиброй, из которой сделаны прокладки 6, специально положены в одной плоскости с подвижным контактом.
Контроллеры - многопозиционные аппараты для включения и переключения в силовых цепях и цепях управления.
Их применяют обычно для переключений резисторов при пуске, регулировании частоты вращения и реверсировании электродвигателей.
Устройство контроллера позволяет, в отличие от рубильника, включать электрические цепи не одновременно, а в определенной, заранее установленной последовательности. На рис, а показана схема действия одного звена контроллера кулачкового типа.
Рабочие контакты 5 и 4 укреплены на изоляционных основаниях - подвижном 3 и неподвижном 6. На подвижной основании, что может поворачиваться вокруг оси 2, укрепленный ролик 8. На валовые 1 укреплена кулачковая шайба 9. Если она сталкивается с роликом поверхностью меньшего радиуса, контакты замкнуты действием пружины 7. Поворачивая вал 1 и кулачковую шайбу, контакты можно разомкнуть. Таких кулачковых элементов вдоль вала 1 устанавливается столько, сколько требует схема управляемого электрической цепи.
![]()
Рисунок 16.2 Схема действия одного звена контроллера кулачкового типа.
Контрольные вопросы:
1. Где применяется ручное управление?
2. Что такое рубильники?
3. Где применяют контроллеры?
4. Что такое пакетные выключатели?
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 5: ЭЛЕКТРОМАГНИТНЫЕ
УСТРОЙСТВА АВТОМАТИКИ
Тема 17. Электромагниты
17.1. понятие электромагнетизма
17.2. Понятие и классификация электромагнитов
17.3. Практическое использование электромагнитов
17.4. Схемы электромеханического торможения.
17.1 Понятие электромагнетизма
Электромагнетизм, наука, которая занимается вопросом взаимозависимости магнитных и электрических явлений, например, возникновение магнитного поля при прохождении электрического тока.
Электромагнит, катушка с ферромагнитным сердечником (например .. из мягкой стали), которая под воздействием магнитного поля, созданного при прохождении через обмотку электрического тока, становится магнитом.
Электричество, 1) явления, в которых существенную роль играет электрический заряд или ток, 2) наука о электрические заряды и связанные с ними электрические и магнитные поля (напр. Магнитное поле вокруг проводника с током) взаимосвязь между электрическими и магнитными полями, а также связанные с ними явления.
Магнетизм, явления и свойства материи, связанные с взаимодействием тел через магнитное поле.
Магнит, элемент с магнитного, твердого материала, источник постоянного магнитного поля; каждый магнит имеет два разноименных полюса (т.н. южный и северный), вокруг которых поле сильнейшим; магниты бывают брусковые, тороидальные, в форме подковы и др .; используются в компасах, электрогенераторы, двигателях, громкоговорителях, микрофонах, замках, и тому подобное.
Явление магнетизма известно людям давно. Китайцы говорили о естественном магните: "любящий камень притягивает железо, как любящая мать прижимает детей". Древние греки называли магнит "грекулесовим камнем". Если их так удивляла сила притяжения природного магнита, что бы они сказали, увидев современные электромагниты, которые поднимают тонны железа.
Вещество, из которого состоит "геркулесов камень" - магнетит, или иначе магнитный железняк (химический состав: 31% FeO i 69% Fe2 O3) - это намагниченные каменные кусочки, иногда довольно больших размеров (до нескольких килограммов). Название "магнит", как утверждал Платон, была дана Еврипидом, который называл его в своих драмах "камнем с Магнезии" (Греция). Магнит действует не только на железо. Никель, кобальт, марганец, платина, золото, серебро, алюминий также привлекаются магнитом, только не так сильно. А диамагнитны тела, например цинк, свинец, висмут отталкиваются от сильного магнита. Если наполнить чистым кислородом мыльный пузырь и поместить ее между полюсами сильного магнита, она заметно растянется от одного полюса к другому. Пламя свечи между полюсами сильного электромагнита меняет свою обычную форму.
Лучше направление магнитного поля можно определить, если насыпать мелкие железные стружки тонким ровным слоем на стеклянную пластинку или кусок гладкого картона, подвести под него обычный магнит и легко встряхивать стружки. Они намагнитятся под действием магнита и после встряхивания образуют такую картину: чем ближе к полюсу, тем гуще и чистые линии стружек. С удалением они становятся все розридженишимы и менее четкими.
А как же происходит намагничивания? Каждый атом железа, входящего в состав стали, мы можем представить как маленький магнитик. Точнее, рассматривать нужно не атомы, а домены - образования, состоящие из большого количества атомов, иногда видимые невооруженным глазом. В ненамагниченной стали они расположены хаотично, так что действие каждого уничтожается действием противоположно расположенного "магнитика". Когда же брусок стали натирают магнитом, он как бы возвращает силой своего притяжения "магнитики" одноименными полюсами в один и тот же сторону. Но этот способ намагничивания годится для получения только слабых магнитов.
17.2 Понятие и классификация электромагнитов
Электромагнит - устройство, создающее магнитное поле при прохождении электрического тока. Конечно электромагнит состоит из обмотки и ферромагнитного сердечника, который приобретает свойства магнита при прохождении по обмотке тока. В электромагнитах, предназначенных, прежде всего, для создания механического усилия также присутствует якорь (подвижная часть магнитопровода), передающий усилие.

Рисунок 17.1 Электромагнит
Обмотки электромагнитов изготавливают из изолированного алюминиевого или медного провода, хотя есть и сверхпроводящие электромагниты. Магнитопроводы изготавливают из магнитомягких материалов - обычно с электротехнической или качественной конструкционной стали, литой стали и чугуна, железоникелевых и железокобальтовых сплавов. Для снижения потерь на вихревые токи магнитопроводы выполняют из набора листов (шихта).
Электромагниты применяют для создания магнитных потоков в электрических машинах и аппаратах, устройствах автоматики и т.д. (генераторов, двигателей, реле, пускатели и т.д.).
Нейтральные электромагниты постоянного тока
В таких магнитах сила притяжения зависит только от величины тока в обмотке и не зависит от направления тока.
Поляризованные электромагниты постоянного тока
В электромагнитах этого типа создается 2 независимых магнитных потока: поляризационный, который образуется обычно полем постоянного магнита, и рабочий магнитный поток, который возникает под действием обмотки управления, намагничивающей силы (м. Р. С.). Действие такого магнита зависит как от величины магнитного потока, так и от направления электрического тока в рабочей обмотке.
Электромагниты переменного тока
В этих магнитах питания обмотки осуществляется от источника переменного тока, а магнитный поток периодически изменяется по величине и направлению, в результате чего сила притяжения пульсирует от нуля до максимального значения с удвоенной частотой по отношению к частоте тока питания.
Другие классификации
Электромагниты различают также по ряду других признаков: по способу включения обмоток - с параллельными и последовательными обмотками; по характеру работы - работающие в длительном, прерывистом и кратковременном режимах; по скорости действия - быстродействующие и замедленного действия и т.д.
Самый простой электромагнит
Самым простым электромагнитом является проводник намотаный на цилиндрическую катушку - соленоид. Гораздо сильнее магнитное поле можно создать, вставив в катушку сердечника из ферромагнитного материала. При этом магнитное поле катушки намагничивающего сердечник и то, в свою очередь, создает дополнительное магнитное поле.

Рисунок 17.2. - Электромагнит
Устройства, где используются электромагниты.
Электромагниты используются там, где необходимо магнитное поле, которое можно быстро и легко изменить, например в электрическом звонке, телеграфии, электромашинах, релейной технике.
17.3 Практическое использование электромагнитов
На металлургических заводах можно видеть гигантские электромагнитные подъемные краны, переносят огромные грузы - массивные железные глыбы, или части машин в десятки тонн - без всякого прикрепления. На одном только металлургическом заводе электромагнитный кран переносит сразу 10 рельсов, заменяя ручной труд 200 человек. Но если ток по какой причине прекратится, авария неизбежна. Диаметр электромагнита, изображенного на рис.5 достигает 1,5 м, он может поднять до 16 тонн груза (товарный вагон). Он не сможет переносить только слишком раскаленный металл: нагретый до 800 ° С магнит теряет магнитные свойства. Исключением является случай, когда по раскаленным металла течет сильный ток, образующий магнитное поле, способное взаимодействовать с внешним магнитным полем.
Как ни странно, но защитой от магнитных сил также железо. Внутри железного кольца магнитная стрелка компаса не отклоняется магнитом, расположенным вне кольцом. Старые механические часы со стальными или железными частями выходят из строя, если их намагнитить. Но если часы имеют железную или стальную крышку, то его намагнитить даже самый сильный электромагнит.
Силой электромагнитов иногда пользуются фокусники. Известный например трюк, когда человек очень сильна не могла поднять ту вещь, которую легко поднимала секунду назад. Дно ящика железное, сам он стоит на подставке, является сильным электромагнитом. Достаточно пустить ток, и его не смогут поднять даже два-три силачей.
Тяжелоатлеты используют электромагнит для тренировок. Его подвешивают на высоте, немного большей человеческого роста, а спортсмен, держа в руках железную утюг, пытается побороть магнитное притяжение. В зависимости от тока, который регулируется тренером, привлечение бывает разной силы, и может быть таким, что атлет, не желая выпускать утюги с рук, рискует повиснуть на магните.
Сельскохозяйственная техника использует магниты для того, чтобы отделить ворсистых семян сорняков от гладкого зерна культурных растений. Если смесь семян осыпать железным порошком, то крупинки железа облепят семена сорняков, но не примут к гладкой семена полезных растений. Магнит вылавливает все сорняки. Электромагнетизм позволяет также работникам музеев разделять страницы древних документов с помощью одноименной электризации страниц документов.
Институт железнодорожных технических исследований в Японии продолжает разработку транспорта на магнитной подушке. Проводятся многократные экспериментальные пробеги поезда на специальной железной дороги в преф. Миядзаки на о. Кюсю с целью создания системы, которую можно было бы запустить в практическую эксплуатацию. Во время пробега в 1979 г.. Без пассажиров была достигнута скорость 517 км / ч, в 1987 году. С пассажирами - 400 км / ч. В линейном двигателе экспериментального поезда использован как сверхпроводник ниобий-титановый сплав, а в качестве охладителя - жидкий гелий. Впрочем, гелий имеет один недостаток: он очень дорогой. Ученые работают над тем, чтобы достичь нужной сверхпроводимости хотя бы при температуре жидкого кислорода.
Были попытки создать магнитный вечный двигатель - perpetuum mobile. Вот один из таких проектов: сильный магнит А размещается на колонке. К ней приставлены два наклонных желоба М и N, причем верзний имеет отверстие С в верхней части, а нижний N изогнутый. Этот двигатель должен действовать так: если в точку В положить небольшой железный шарик, то под действием магнита А она покатится вверх, провалится через отверстие С в нижней желоб N, покатится вниз, поднимется по закруглению D желоба и попадет на верхней желоб М. Отсюда притянется магнитом вверх к отверстию С, и так бесконечно. Ошибка изобретателя в том, что скорость шарика, который катится по желобу N будет недостаточна для того, чтобы подняться по закруглению D. Это - еще одно доказательство невозможности существования perpetuum mobile.
Вечных двигателей не существует, однако долговечны - вполне возможная вещь. В 1903 году Стрэттоном был изобретен "радиевый часы", с заводом на 1600 лет. Строение его достаточно несложная. В стеклянном баллоне, с которого выкачан воздух, на кварцевой нити В (рисунок 17.2), не проводит электрический ток, подвешенная небольшая стеклянная трубочка А, которая содержит несколько тысячных долей грамма радиевой соли. К концу ее подвешены два золотых листочка. β лучи, которые легко проходят сквозь стекло и состоят из потока электронов, относят с собой отрицательный заряд, а потом сама трубка с радием постепенно заряжается положительно. Этот позитивный заряд переходит на золотые листочки и заставляет их раздвигаться , при этом касаясь стенок баллона. В соответствующих местах приклеены полоски фольги, по которым заряд отходит, и листочки снова сходятся. Скоро накапливается новый заряд, листочки снова расходятся, и так будет продолжаться целые годы, пока радуйся продолжать излучение .Способность радио излучать лучи ослабляется вдвое через 1600, том радиевый часы будет идти не меньше тысячи лет. Если бы в эпоху начала Руси было создано такие часы, то он продолжал бы работать и в наше время. Но мощность этого двигателя настолько мала, что его невозможно использовать для других целей.
17.4. Схемы электромеханического торможения.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет потрачена вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбега. Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительная и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в подвижной системе, называемый торможением.
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
При механическом торможении кинетическая энергия превращается в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя или отдается в сеть, или преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительные.
Схема динамического торможения асинхронных двигателей
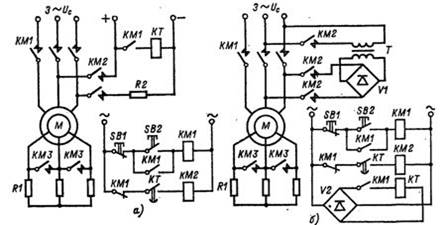
Рисунок 17.3 - Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе задачей времени используются узлы схем, приведены на рисунку17.3, из которых схема рисунок 17.3, а, а применяется при наличии сети постоянного тока, а схема рисунок17.3, б - при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокирующим контактом линейного контактора КМ1.
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рисунок 17.3, а дополнительным резистором R2, а в схеме соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть избран как на постоянном, так и на переменном токе в зависимости от необходимого числа включений в час и использования пусковой аппаратуры.
Приведеные на рисунке 17.3 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведена на рис.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис.
В качестве реле противовключения используется реле контроля скорости SR, укрепленное на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 - 0,2) ωуст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной и в нереверсивные схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, что отключают обмотку статора от напряжения при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
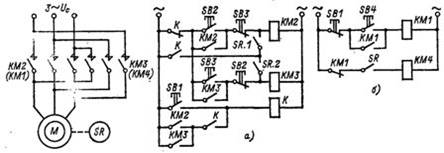
Рисунок 17.4. Узлы схемы управления торможения противовключением асинхронного двигателя с короткозамкнутим ротором с контролем скорости при остановке в реверсивной и нереверсивные схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящий из R1 и R2, приведен на рис. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЕВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Частота для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД схеме управления, приведенной на рис., Но может использоваться и при остановке в нереверсивные схеме управления, приведенной на рис.
При пуске двигателя реле противовключения К V НЕ включается и степень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
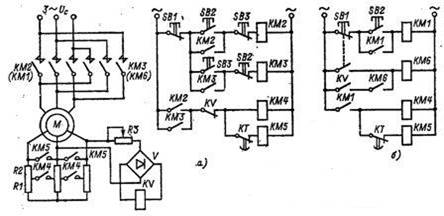
Рисунок 17.5. Узлы схем управления торможением противовключением асинхронных двигателей с фазным ротором с контролем скорости при реверсе и остановке
В режиме противовключения после подачи команды на реверс или остановки скольжения электродвигателя повышается и происходит включение реле KV.
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляет примерно 10 - 20% установившейся начальной скорости ωпер = (0,1 - 0,2) ωуст, реле KV отключается, обеспечивая команду на отключение степени противовключения R1 с помощью контактора КМ4 и на реверсирования электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивные схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллеры и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для содержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем.
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз одновременно с двигателем, а с некоторой задержкой по времени, например, после окончания электрического торможения.
Выдержку времени обеспечивает реле времени КТ, которая получает команду на начало отсчета времени, обычно при отключении линейного контактора КМ1.
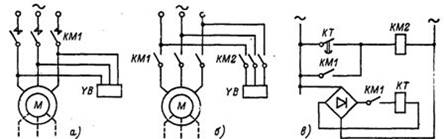
Рисунок 17.6. Узлы схем, которые осуществляют механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схема конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможения с самовозбуждением. Оно обеспечивается конденсаторами C1 - С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рисунок 17.7, а) или треугольника.
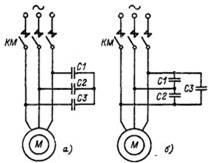
Рисунок 17.7. Узлы схем, которые осуществляют конденсаторное торможения асинхронных двигателей
Контрольные вопросы:
1. Что такое электромагнетизм?
2. Что такое самый электромагнит?
3. Где используются электромагниты?
4. На сколько видов можно разделить способы торможения электродвигателей?
Тема 18. Электромагнитные муфты.
18.1. Электро Механические муфты
18.2. Электромеханические муфты трения
18.3. Электромеханические муфты сухого трения
18.4. Ферропорошковые муфты трения
18.5. Электромеханические муфты скольжения
18.6. Использование электромеханических муфт скольжения
18.7. Плавная регулировка скорости вращения
18.8. Регулирование крутящего момента
18.9. ЭМК в следящих системах малой мощности
18.10 Электромагнитные плиты, строение, принцип действия, назначение (на самостоятельную проработку)
18.10.1 Применяют электромагнитных столов и плит.
18.10.2. Принцип работы электромагнитной плиты.
18.10.3. Недостатки электромагнитных плит и столов
18.1. Электромеханические муфты
Муфта - устройство, служащее для сцепления двух валов, то есть для передачи крутящего момента с одного вала (ведущего) на другой (известный). Ведущий вал вращается приводным двигателем, а ведомый вал связан с нагрузкой. Муфта называется электромеханической, если для передачи механического момента используются электрические явления. Управление муфтой осуществляется при этом с помощью электрического сигнала, следовательно, она представляет собой преобразователь электрического сигнала в механический вращающий момент. Так как мощность, развиваемая на ведомом валу, гораздо больше мощности управляющего сигнала, электромеханическая муфта осуществляет также и усиление мощности сигнала. Двигатель, вращающий ведущий вал, в энергетическом отношении играет ту же роль, что и источник питания в обычном электрическом усилителе. В обоих случаях входной электрический сигнал управляет потоком мощности от этого источника. Электромеханические муфты нашли свое применение в ряде систем сельскохозяйственной автоматики и как регулируемые электроприводы сельскохозяйственных машин.
Муфты бывают релейной действия, осуществляют жесткое сцепление валов при подаче сигнала, и непрерывного действия, осуществляющих гибкое сцепление, когда скорость ведомого вала зависит от величины входного сигнала и эта зависимость может быть предоставлена плавной статической характеристикой "скорость ведомого вала - входной сигнал". Для автоматических систем основной интерес представляют муфты гибкой сцепки.
Электромеханические муфты применяются как исполнительные элементы. Они заменяют исполнительный двигатель с управляемой скоростью вращения, позволяя применять в качестве приводных двигателей нерегулируемые электрические и неэлектрические двигатели. Такая замена, как правило, упрощает схему и конструкцию автоматической системы в целом, повышает ее надежность.
Однако основное преимущество электромеханических муфт перед обычным управляемым электродвигателем в их большей производительности. Это объясняется тем, что момент инерции вращающихся частей муфты, связанных с ведомым валом, можно сделать значительно меньше момента инерции приводного двигателя, определяет быстродействие системы управления скоростью нагрузки при воздействии на двигатель, а не на муфту.
Электромеханические муфты применяются в диапазоне мощности от нескольких видов (например, в маломощных следящих системах приборного типа) до десятков тысяч киловатт (в электроприводах прокатных станов, металлорежущих станков, в приводах гребных винтов на судах).
Исполнительные механизмы с электромеханическими муфтами отличаются от электродвигательные ВМ более простой конструкцией, низкой стоимостью, высокой надежностью и долговечностью и меньшей экономичностью при большом диапазоне регулирования скорости вращения.
Их применение оказывается зачастую целесообразным в тех механизмах, где стоимость затраченной энергии составляет небольшую долю себестоимости продукции. В этих случаях повышение надежности, а, следовательно, уменьшение простоев и брака, как правило, окупает увеличение расхода энергии, а низкая себестоимость этих ВМ приводит к минимуму расчетных расходов. Кроме того, рациональной областью их применения механизмы с вентиляторной моментом нагрузки, пропорциональным квадрату скорости вращения.
По принципу действия электромеханические муфты делятся на два основных типа: электромеханические муфты трения (ЕМТ) и электромеханические муфты скольжения (ЭМС). Они в большинстве случаев выполняют две основные функции:
- Соединение и разъединение приводного двигателя с рабочим механизмом;
- Регулирование скорости вращения рабочего механизма независимо от скорости вращения приводного двигателя (как правило, при ее постоянной величине).
18.2. Электромеханические муфты трения
В муфтах трения крутящий момент на ведомом валу создается за счет силы трения. Электромеханические муфты трения в свою очередь подразделяются на муфты сухого трения и феропорошковые (магнитоэмульсионные) муфты трения.
18.3. Электромеханические муфты сухого трения
Принцип действия муфты сухого трения иллюстрируется рис. Муфта состоит из двух половин 1 и 2 (полумуфт), на которых укреплены диски трения с фрикционного материала. Одна полумуфта может перемещаться вдоль своего вала на шпонке, другая соединена со своим валом жестко. Если прижать обе половины муфты друг к другу, то неподвижный до этого известный вал станет вращаться вместе с ведущим, то есть произойдет сцепление валов за счет силы трения, препятствует проскальзыванию дисков трения друг друга.
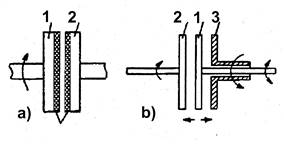
Рисунок 18.1. Принцип действия муфт сухого трения: а - нереверсивный, b – реверсивной
На рисунке 18.1 показан принцип действия реверсивной муфты трения, которая позволяет изменять направление вращения ведомого вала. Она представляет собой комбинацию двух простых нереверсивных муфт: ведомый диск 1 находится между двух ведущих дисков 2 и 3, вращающихся в разные стороны. Направление вращения ведомого диска можно менять, прижимая его то к одному, то к другому ведущего диска. Ведущие диски приводятся во вращение или двумя отдельными двигателями, или одним общим. В последнем случае один из дисков соединяется с двигателем через зубчатую передачу, меняет направление его вращения по сравнению с другим диском.
Если необходимо быстрее тормозить, то ведомый вал муфты трения комбинируют с тормозом. Такая комбинированная муфта выглядит как реверсивная, только второй ведущий диск в этом случае заменяется недвижимым диском, жестко укрепленным на основе муфты. Торможение ведомого диска осуществляется путем прижатия его к этому неподвижного диска.
Прижатия частей муфты друг к другу может осуществляться, например, с помощью гидравлического или пневматического сервомотора. Тогда мы имеем соответственно гидравлическую или пневматическую муфту трения с гидравлическим или пневматическим управлением. Если же части муфты сжимаются с помощью какого-либо электромеханического преобразователя, то получается электромеханическая муфта трения.
Основное распространение получили электромеханические муфты трения с электромагнитным управлением, где для сцепления обеих половин муфты применяется электромагнит. Наиболее быстродействующие электромеханические муфты трения выполняются с магнитоэлектрическим управлением. В этом случае вместо электромагнита применяется магнитоэлектрический преобразователь электрического сигнала в перемещение и силу.
На рис. показан фрагмент простейшей Нереверсивные муфты трения с электромагнитным управлением. Она представляет собой электромагнит, состоящий из якоря 1 и магнитопровода 2 с обмоткой 3. Подведение тока в обмотку осуществляется с помощью двух контактных колец с щетками.
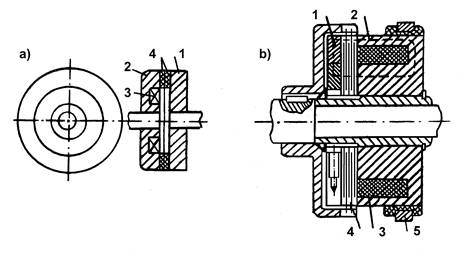
Рисунок 18.2. Муфта трения с электромагнитным управлением: а - однодисковая, b - многодисковая; 1 - якорь, 2 - магнитопровод, 3 - обмотка, 4 - диски трения, 5 - контактный кольцо
На магнитопроводе и якоря укреплены диски трения 4. Якорь может перемещаться вдоль одного вала на шпонке. Магнитопровод укрепленный на другом валу жестко. Якорь оттягивается от магнитопровода возвратной пружиной (она на рисунке 18.2 не показаны). Поэтому при отсутствии тока в обмотке ведомый вал неподвижен. Когда сигнал на обмотку якорь притягивается к магнитопровода и происходит сцепление валов.
Муфты трения с электромагнитным управлением бывают однодисковым и много дисковыми. Многие Дисковыми делают мощные муфты для уменьшения их габаритов.
На рис. показан вариант муфты трения с электромагнитным управлением и неподвижной обмоткой. Такие муфты не только свободные от скользящих контактов для подвода тока в обмотку, но и имеют большое быстродействие (имеют меньшую постоянную времени обмотки). Но они отличаются повышенными размерами обмотки через увеличен воздушный зазор.
![]()
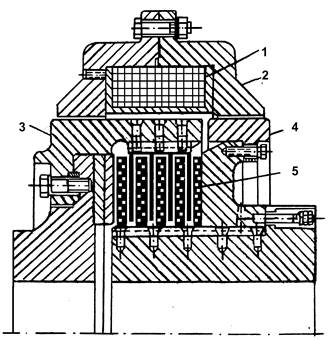
Рисунок 18.3. Муфта трения с электромагнитным управлением и неподвижной катушкой: 1 - обмотка, 2 - магнитопровод, 3 и 4 - полумуфты, 5 - диски трения
В электромагнитных муфтах трения применяют, как правило, электромагниты постоянного тока, поскольку они имеют известные преимущества перед электромагнитами переменного тока. При наличии сигнала переменного тока в электромагниты постоянного тока встраивают выпрямитель.
Расчет муфты трения с электромагнитным управлением состоит из расчета поверхностей трения и расчета электромагнита. Исходными данными являются величина крутящего момента, который должен передаваться муфтой, и габариты муфты. Рассмотрим порядок расчета муфты на примере дисковой муфты.
Передаваемый муфтой крутящий момент
 ,
(18.1)
,
(18.1)
где m - число поверхностей трения, обусловлено числом дисков трения; Кр = (R1 / R2) * Ктер - расчетное отношение; Ктер - коэффициент трения, зависит от материала дисков и состояния их поверхностей; R1 и R2 - внутренний и внешний радиусы дисков трения; р - давление, с которым диски прижимаются электромагнитом.
Задавшись внешним радиусом дисков трения R2, можно найти число поверхностей трения m, необходимое для передачи заданного крутящего момента M, или задав m, можем найти R2.
Тяговое усилие от электромагнита, определяется как
![]() .
(18.2)
.
(18.2)
Далее производится расчет электромагнита. Для уменьшения размеров обмотки, ограниченных допустимым ее нагревом, в мощных муфтах делают жидкостное охлаждение. Менее мощные просто поставляют ребрами, повышающих охлаждения.
Ориентировочные значения входных в формулы величин:
Коэффициент трения Ктер для трущихся тел из стали, чугуна, бронзы примерно равна 0,1 - 0,2; для специальных фрикционных материалов типа Ферродо его значение принимают равным 0,4 - 0,8; отношение Кр принимают равным 0,3-0,6; величина давления p = 2¸3 кг / см.
Рассмотрим динамику работы электромеханической муфты трения. Переходный процесс от момента подачи напряжения на обмотку муфты, когда ведомый вал неподвижен, к установлению постоянной скорости вращения ведомого вала состоит из следующих трех этапов. Первый этап - от подачи входного напряжения до момента столкновения поверхностей трения - представляет собой этап срабатывания электромагнита. Его продолжительность равна времени срабатывания электромагнита. При необходимости его уменьшения применяют обычные способы изменения временных параметров электромагнитов.
Второй этап заканчивается полным сцеплением поверхностей трения. Это этап, в течение которого прекращается скольжение ведомого вала по ведущего. Однако переходный период этим не заканчивается, так как в результате сцепления полумуфт, к двигателю, вращающий ведущий вал и работал ранее вхолостую, оказывается приложена нагрузка ведомого вала. Поэтому после второго этапа наступает третий этап, который представляет собой переходный процесс для приводного двигателя, вызванный накидом нагрузки.
Полное время срабатывания муфты с электромагнитным управлением, равной сумме времен всех трех этапов переходного процесса измеряется сотыми и десятыми долями секунды.
Рассмотрены муфты трения применяются, главным образом, для жесткого соединения валов. Однако и с их помощью можно осуществить плавное изменение установившегося значения скорости ведомого вала путем импульсного управления муфтой. В этом случае входной сигнал представляет собой импульсы напряжения, которые движутся с постоянной частотой. За время импульса муфта срабатывает и ведомый вал начинает разгоняться; за время паузы между импульсами происходит отпуска муфты и торможения вала. При этом скорость ведомого вала колеблется относительно некоторого среднего значения с частотой следования управляющих импульсов.
Величиной этого среднего значения можно управлять, изменяя скважность выходных импульсов.
18.4. Ферро Порошковые муфты трения
Основное назначение этих муфт - гибкое сцепление валов, хотя они применяются и для твердого сцепления. Принципиально феропорошковая муфта трения отличается от рассмотренной выше муфты сухого трения с электромагнитным управлением тем, что воздушный зазор между полумуфтами заполнен ферромагнитным наполнителем. Известная полумуфта при этом жестко соединена со своим валом, как и ведущая полумуфта. Таким образом, зазор между полумуфтами не меняется. Ферромагнитный наполнитель представляет собой механическую смесь ферромагнитного (обычно железного) порошка с жидким или твердым диэлектриком. В качестве жидкого диэлектрика используют чаще всего различные масла, в качестве твердого диэлектрика - графитовый порошок или тальк.
Если поместить такой ферромагнитный наполнитель в магнитное поле, то отдельные ферромагнитные частицы начинают смещаться, притягиваясь друг к другу и образуя целые цепочки, ориентированные вдоль поля. В результате с увеличением магнитного поля жидкий наполнитель густеет, переходя сначала в студенистый состояние, а затем и вовсе затвердевает. Аналогично и твердый наполнитель превращается в конце концов с легко сыпучего порошка в твердое тело, спаянное силами магнитного поля.
Это свойство ферромагнитного заполнителя затвердевать в магнитном поле и использована в феропорошкових муфтах трения. При отсутствии сигнала на обмотке электромагнита с ведущего вала на ведомый вал передается незначительный момент за счет начальной небольшой вязкости ферромагнитного наполнителя. При пропускании по обмотке электромагнита тока магнитный поток, создаваемый в зазоре между полумуфтами, приводит к увеличению вязкости наполнителя. В результате момент, передаваемый на ведомый вал, увеличивается. По мере роста тока в обмотке возрастает и вращающий момент на ведомом валу, причем до тех пор, пока он не достигнет величины полного момента, развиваемого ведущим валом, происходит при жестком сцеплении обоих полумуфт затвердевшим наполнителем.
Крутящий момент на ведомом валу определяется, таким образом, током в обмотке электромагнита и практически не зависит от скорости вращения ведомого вала. На показана типовая форма статической характеристики феропорошковой муфты трения "крутящий момент на выходе - входной сигнал". На рис. показан эскиз феропорошковои муфты трения цилиндрического типа. Выполняются такие муфты и дискового типа, как рассмотрено выше муфта сухого трения.
Конструктивно феропорошковые муфты трения значительно сложнее муфт сухого трения. Основные сложности заключаются в необходимости создать надежные уплотнения, не допускающие попадания порошка в подшипники, и предотвратить выделение ферромагнитного порошка из наполнителя под действием центробежной силы при вращении муфты и вследствие его осадки, когда муфта стоит.
![]()
Рисунок 18.4 Ферро Порошковая муфта трения: а - статическая характеристика муфты; b - эскиз муфты цилиндрического типа (1 - ведущий вал, 2 - уплотнение, 3 - фланец из немагнитного материала, 4 - детали из ферромагнитного материала, 5 - ведомый вал, 6 - обмотка)
Остановимся на динамике Ферро порошковых муфт. Так что здесь нет подвижного якоря (разумеется, речь идет о поступательном движении), как в муфтах сухого трения, феропорошкови муфты отличаются большим быстродействием. Можно считать, что вращающий момент на ведомом валу в переходный период не отстает во времени от магнитного потока в зазоре. Поэтому инерционностью процесса изменения вязкости наполнителя можно пренебречь. Мгновенное значение магнитного поля, в свою очередь, определяется током в обмотке, то есть характеристика М = f (I), приведена на рисунке 18.4, а, справедлива и в переходный период. Уравнения передаточной функции феропорошковои муфты трения, связывает величину момента на ведомом валу с напряжением на обмотке, имеет вид:
![]() ,
(18.3)
,
(18.3)
где Кэ = U / R -
электромагнитный передаточный коэффициент муфты; U - напряжение на обмотке
муфты; R - сопротивление обмотки муфты; Kм = DM / DI - электромеханический передаточный коэффициент муфты, определяется
статистической характеристикой, приведенной на рис.3-4, а; То = L / R -
электромагнитная постоянная времени муфты; L - индуктивность обмотки муфты; ![]() - -
Электромеханическая постоянная времени муфты; J - момент инерции муфты; Мн -
номинальный крутящий момент муфты;
- -
Электромеханическая постоянная времени муфты; J - момент инерции муфты; Мн -
номинальный крутящий момент муфты; ![]() - угловая частота вращения ведущего вала
муфты;
- угловая частота вращения ведущего вала
муфты; ![]() - Номинальное скольжение муфты.
- Номинальное скольжение муфты.
Уравнения передаточной
функции Ферро порошковой муфты трения в общем случае является нелинейным.
Нелинейность определяется изменением значений передаточных коэффициентов и
постоянных времени муфты в зависимости от рабочей точки. Во-первых, если учесть
насыщения магнитопровода, то при этом электромагнитная постоянная времени цепи
Tе будет уменьшаться с ростом сигнала из-за уменьшения индуктивности обмотки L.
Во-вторых, из-за наличия момента сопротивления нагрузки Мс меняются значения
электромеханического передаточного коэффициента Kм и электромеханической
постоянной времени Тм. Причем зависимость ![]() может быть сама нелинейной
функцией, также приводит к нелинейности передаточной функции муфты.
может быть сама нелинейной
функцией, также приводит к нелинейности передаточной функции муфты.
Если ограничиваться небольшими отклонениями входного сигнала U от его установившегося значения, соответствует некоторой исходной постоянной скорости вращения системы муфта-рабочая машина, то передаточную функцию муфты можно линеаризировать. В результате получим в точке установившегося режима, по которому взяты отклонения переменных, уравнение передаточной функции феропорошковои муфты трения в виде апериодического звена второго порядка. Значения коэффициентов этого звена являются переменными величинами и их определяют по статической характеристике муфты для каждой из ее рабочих точек отдельно.
18.5 Электромеханические муфты скольжения
Наибольшее применение в промышленности и в сельском хозяйстве нашли ВМ с ЭМК и автоматическим регулятором скорости, обеспечивает ее жесткие механические характеристики.
ЭМК в большинстве ВМ выполняют две основные функции:
- Соединение и разъединение приводного двигателя с рабочим механизмом;
- Регулирование скорости вращения рабочего механизма независимо от скорости вращения двигателя.
ВМ с ЭМК по сравнению с ЕМТ имеют следующие преимущества:
- Возможность бесступенчатого регулирования скорости вращения рабочего механизма при постоянной скорости вращения двигателя;
- Повышенную надежность и долговечность, связанную с отсутствием трущихся фрикционных элементов;
- Предотвращение двигателя и рабочего механизма от перегрузок и поломок, обусловлено ограниченностью величины предельно передаточного момента;
- Сглаживание (демпфирование) ударов и колебаний нагрузки, повышает срок службы рабочего механизма, механических передач и двигателя.
К недостаткам ВЫ с ЭМК относятся:
- Меньше экономичность, обусловленная наличием потерь скольжения не только во время переходных процессов, но и в постоянных рабочих режимах;
- Меньше быстродействие, связанная в большинстве случаев с повышенными значениями электромеханической и электромагнитной постоянных времени;
- Меньшие значения удельных вращающих моментов, приходящихся на единицу объема или веса муфты.
Приводы с ЭМК по своим конструктивным схемам и устройства механической части отличаются большим разнообразием. Конструктивная схема привода в ряде случаев определяет величину минимального воздушного зазора, который может повлиять на электромагнитные параметры муфты скольжения.
Как правило, ЭМК применяемые для гибкого сцепления валов и плавного регулирования скорости вращения выходного вала, состоят из двух частей: индуктора и якоря. На рис. показан вариант такой ЭМК. Индуктор представляет собой электромагнит постоянного тока, магнитный поток которого замыкается через якорь. Пусть, например, индуктор соединен с ведущим валом, а якорь с ведомым валом (может быть и наоборот). При вращении индуктора его магнитное поле будет вращаться относительно якоря. В якоре при этом приводятся токи, которые, взаимодействуя с полем индуктора, создают вращающий момент, захватывает якорь в движение вслед за индуктором.
Рисунок 18.5 Электромеханическая муфта скольжения: 1 - якорь; 2 - индуктор; 3 - контактные кольца; 4 - обмотка индуктора; 5 - полюса индуктора
Таким образом, эта муфта имеет индукционное управления. Принцип действия ее такой, как и асинхронного двигателя, только вращающееся магнитное поле создается здесь переменным многофазным током, а вращением полюсов электромагнита постоянного тока.
В отличие от обычных асинхронных машин, в муфте, изображенной на рисунке 18.5, якорь - внешний, а индуктор находится внутри него. Однако делаются муфты и с внутренним якорем. В муфтах скольжения, как и в асинхронных двигателях, якорь выполняется в виде короткозамкнутой обмотки - "беличье колесо", сплошного массивного ротора, а в быстродействующих маломощных муфтах в виде пустого ротора - стакана.
На рисунке 18.6 показаны типичные статические характеристики муфты скольжения: зависимость скорости ведомого вала от момента на нем при различных значениях тока в обмотке индуктора. Если известна зависимость момента сопротивления нагрузки от скорости ее вращения Mс = f (ω) (пунктир на рисунке 18.6), то, когда мы нанесем такую зависимость в той же системе координат, по точкам пересечения характеристик муфты и нагрузки можно построить результирующую статическую зависимость скорости вращения нагрузки от тока в обмотке индуктора ω = f (I) или напряжения на ней.
![]()
ЭМК позволяют регулировать скорость загрузки в диапазоне примерно 1: q10. Такие муфты выполняются на мощности от десятков ватт до тысяч киловатт. Как и муфты трения, они могут быть сделаны реверсивными.
Кроме того, применяются комбинированные муфты, где объединены муфта скольжения с муфтой трения, последняя служит для жесткого соединения валов после разгона нагрузки, осуществляемого с помощью муфты скольжения.
Динамика муфты скольжения описывается такими же уравнениями, что и ферро порошковой муфты трения.
Серийно выпускали комплектные привода серии ПМС, которые состоят из электродвигателя, муфты скольжения индукторного типа и автоматического регулятора скорости. Они имеют шесть типоразмеров на вращающие моменты от 1,7 до 30 Нм, могут использоваться в различных производственных механизмах с постоянным и вентиляторным моментами нагрузки. Технические данные этих приводов приведены в таблице.
Впоследствии привода с ЭМК серии ПМС были заменены на более совершенные в конструктивном плане привода серии ПМС - М, имеющие в основном аналогичные технические характеристики.
ЭМК серии ИМС также имеют шесть типоразмеров на моменты от 70 до 1600 Нм и предназначены для использования в качестве силовой электропривод, они применяются в основном для механизмов с вентиляторной нагрузкой. Особенностью их конструкции является открытое исполнение, требует при монтаже применения защитных ограждений, а также они поставляются без приводного электродвигателя. В сельскохозяйственной автоматике привода этой серии ИМС практически не используются.
18.6 Использование электромеханических муфт скольжения
ЭМК широко используются в качестве исполнительных элементов как в устройствах с регулируемым электроприводом, так и в системах автоматического управления. Они применяются для плавного изменения скорости вращения обеспечивают безударный пуск рабочих механизмов с большими маховыми массами, используются для ограничения и регулирования крутящего момента и в других случаях.
18.7 Плавная регулировка скорости вращения
Из рассмотрения принципа действия ЭМК видно, что изменение ее скорости вращения возможна за счет соответствующего изменения тока возбуждения муфты. В связи с мягкими природными характеристиками приходится применять замкнутую систему автоматического регулирования скорости вращения. При этом за счет автоматического изменения тока возбуждения, компенсирует отклонения скорости вращения от заданной, могут быть обеспечены твердые механические характеристики ЭМК. Изготавливаются комплектные электроприводы с использованием ЭМК, состоящие из асинхронного двигателя, ЭМК и автоматического регулятора. Остановимся на энергетических показателях такого электропривода.
Мощность потерь на скольжение расходуется на нагрев активной поверхности якоря. При увеличении скольжения увеличивается э, что приводится в якоре, что вызывает увеличение ихрових токов. В результате джоулей потери растут, вызывая нагрев якоря.
Мощность потерь ЭМК подсчитывается по формуле
![]() ,
кВт (18.4)
,
кВт (18.4)
где M - передаваемый момент,
кгм; n - скорость вращения электродвигателя, об / мин; s - скольжение ЭМК ; nм - скорость
вращения известной части муфты.
; nм - скорость
вращения известной части муфты.
Коэффициент полезного действия муфты (без учета вентиляционных потерь и потерь на возбуждение) равна
![]() ,
(18.5)
,
(18.5)
где hд - к.п.д. электродвигателя.
Полученное выражение показывает, что к.п.д. муфты тем ниже, чем больше ее скольжения.
Коэффициент мощности привода с ЭМК зависит не от скорости вращения, а от передаваемого момента. Также как в асинхронного короткозамкнутого двигателя при полной загрузке муфты до момента ее максимальный и равен номинальному значению электродвигателя. Энергетические параметры привода с ЭДС при различных режимах показаны на рис. Последний режим работы соответствует вентиляторной нагрузке. Абсолютные потери при этом не превышают 17% максимальной мощности, передаваемой муфтой. Для этого режима выпускаются муфты как малой, так и большой мощности. Для работы при постоянном моменте в связи с большими потерями на скольжение мощность, передаваемая муфтой, не должна превышать 3-4 кВт. Увеличение предельной мощности допустимо только для случаев повторно-кратковременного режима работы или режима, когда основное время работы происходит при малых значениях скольжения.
![]()
Рисунок 18.7
Энергетические параметры ЭМК в различных режимах работы: а - М = const; б - Р =
const; в -![]() ; 1 - потребляемая мощность; 2 - потери в
муфте; 3 - полезная мощность на ведомом валу; 4 - к.к.д. муфты.
; 1 - потребляемая мощность; 2 - потери в
муфте; 3 - полезная мощность на ведомом валу; 4 - к.к.д. муфты.
18.8 Регулировка крутящего момента
С этим вопросом приходится сталкиваться при эксплуатации привода намотки различных материалов (проволоки, ленты, бумаги, текстильных изделий, кабелей, металлической ленты и др.). По мере увеличения диаметра намотки необходимо сохранить постоянным усилия натяжения. С этой целью скорость вращения постепенно следует уменьшать. При небольшой кратности диаметров намоточного барабана регулировки момента ЭМК делают без специального регулятора тока возбуждения; при кратности диаметров более 4: 1 - ЭМК обеспечивается автоматическим регулятором тока возбуждения в функции усилия натяжения.
ЭМК, установлена между приводным двигателем и рабочим механизмом с большими маховыми массами, обеспечивает безударный, плавный пуск привода. Это достигается с помощью замедленного увеличения тока возбуждения ЭМК. Таким методом можно достичь необходимого времени пуска. При различном характере изменения тока возбуждения муфты при пуске можно получать различные пусковые диаграммы.
Ограничения крутящего момента
Устанавливая заранее необходимое значение тока возбуждения муфты, можно осуществить ограничения крутящего момента. При крутящем моменте нагрузки более допустимого скорость вращения начинает резко снижаться и наконец становится равной нулю. Для этой цели наиболее удобные муфты, имеющие якоря гильзу из материала с высокой электрической проводимостью, или муфты с короткозамкнутой обмоткой на якоре.
Можно также ограничивать момент путем снижения тока возбуждения при достижении предельно допустимой перегрузки по моменту.
18.9 ЭМК в следящих системах малой мощности
Для работы в следящих системах муфта должна иметь максимальное быстродействие. С этой целью якорь муфты выполняется в виде тонкостенной гильзы из немагнитного материала (алюминий и др.), Что дает минимальный маховой момент. Для получения реверса исполнительный механизм содержит две муфты, вращающихся в противоположные стороны. В зависимости от потребности включается возбуждения одной или другой муфты.
ЭМК в качестве тормоза - для получения тормозных свойств достаточно закрепить неподвижно одну из частей муфты. Вторая часть (обычно якорь) связывается с валом, который надо тормозить. В момент торможения включается ток возбуждения. Так как скольжение при этом максимально, тормозной момент достигает двух - трехкратного номинального момента муфты. Следует учитывать, что по мере снижения скорости тормозной момент снижается и к концу его становится равным нулю (так как скольжения также равна нулю).
При использовании ЭМК в качестве вариатора скорости вращения возможны два способа регулирования тока возбуждения: ручной и автоматический. Ручной способ применяется редко из-за неустойчивости характеристик муфт и зависимости их от нагрузки, колебания сетевого напряжения, нагрева и частоты.
Широкое применение находят автоматические системы регулирования выходной скорости ЭМК. Такие системы обеспечивают три основных режима регулирования: n = const, М = const, P = const, структурные схемы которых приведены на
На рисунке 18.8 приведена схема, обеспечивающая автоматическое регулирование в режиме n = const. Схема состоит из двигателя 1, муфты 2, датчика скорости вращения 3, усилителя 4 и пульта управления с устройством 5, что обеспечивает настройку привода на заданную скорость вращения. На вход усилителя подается сигнал, равный разности сигналов фактической и заданной скорости вращения. Выходное напряжение усилителя подается на катушку возбуждения муфты. Изменение скорости вращения автоматически вызывает такое изменение напряжения возбуждения, при которой скорость стремится к своему первоначальному значению. В результате имеет место автоматическая стабилизация скорости вращения независимо от изменения нагрузки, температуры и колебаний напряжения сети.
Описанная система является непрерывной системой регулирования. С целью упрощения и повышения надежности системы при сравнительно небольших диапазонах регулирования применяется импульсная система регулирования. Такая система применяется в приводах серии ПМС.
На рис. приведена схема регулирования, обеспечивает режим М = const. С этой целью между двигателем 1 и усилителем 4 используется обратная связь 6 по мощности, потребляемой двигателем. Сигнал обратной связи сравнивается с задающим сигналом. Их разница подается на вход усилителя. Дальнейший ход регулирования аналогичный выше описанному. Соблюдение условия М = const обеспечивается путем автоматического изменения скорости вращения. Такая система применяется в приводе прессов, где путем изменения передаваемого момента устанавливаются различные значения давления пуансона пресса.
Задача регулирования в режиме постоянной мощности встречается в приводе намоточных машин. Там нужно выполнить условие неизменности линейной скорости наматываемого материала и усилия натяжения при увеличении диаметра намоточного устройства. Схема такого привода приведена на рис. 3.8, в. У нее есть два канала обратной связи: канал 3 по скорости вращения и канал 6 по потребляемой двигателем мощности. Оба сигнала обратной связи сравниваются с задающим сигналом. Результирующий сигнал подается на вход усилителя. В результате обеспечивается работа привода ЭМК в режиме постоянной заданной мощности.
18.10 Электромагнитные плиты, строение, принцип действия, назначение (на самостоятельную проработку)
18.10.1. Применение электромагнитных столов и плит.
Во время шлифовки вместо механических закрепляющих устройств часто применяют электромагнитные столы и плиты с горизонтальной рабочей поверхиостью. Вращающиеся электромагнитные устройства называют электромагнитными столами, поступательно перемещаются устройства - электромагнитными плитами. Обрабатываемые стальные детали, расположенные на таких столах и плитах, содержатся во время обработки силами магнитного притяжения. Электромагнитное закрепления имеет преимущества по сравнению с зажатием в кулачках. Влючая ток, можно сразу закрепить многие детали, расположенных на рабочей поверхности. Примером может служить шлифовки торцов втулок или колец одной высота.
Также быстро можно закрепить и мелкую деталь, которую при механическом зажима необходимо зажать во многих точках.
![]()
Рисунок 18.9 Электромагнитные плиты
При электромагнитном закреплении заготовки может быть достигнута большая точность обработки, так как деталь при нагревании в процессе обработки, не испытывая бокового сжатия, свободно расширяется. При электромагнитном закреплении можно обрабатывать детали со всех сторон, кроме плоскости прилегания к поверхности. Для вопрос электромагнитных плит применяют постоянный ток напряжением 24, 48, ПО и 220 В. Питание электромагнитных столов и плит переменным током неприемлемо вследствие сильного размагничивает и нагревающего действия вихревых токов.
Электромагниты плита имеет металлический корпус 1, днище которого обеспечено полюсными выступлениями 2. Сверху наложена крышка 3, в которой участки 4, расположены под полюсами, отделенные слоями 5 из немагнитного материала (сплав свинца и сурьмы, олова сплавы, бронза и др.) При пропускании постоянного тока через катушки 6 все участки внешней поверхности крышки (зеркала), окружены немагнитными прослойками, является одним полюсом (например, северным), вся же остальная поверхпость плиты - другим полюсом. Обрабатываемая деталь 7, перекрывающий в любом месте немагнитной прослойкой, замыкает магнитную цепь одного из полюсов 2 и привлекается к рабочей поверхности плиты. Применяют и другие конструкции электромагнитных плит.
Для закрепления небольших деталей расстояться между полюсами желаемый делать как можно меньше. Однако это осуществить трудно, так как между полюсами должны быть размещены витки двух катушек 6. Поэтому для закрепления мелких деталей применяют электромагнитные плиты с несквозные прослойками из немагнитного материала. Такая плита имеет только одну катушку 2. Корпус 1 плиты накрытый толстой стальной крышкой 3 с близко расположенными параллельными канавками 4, заполненными немагнитным материалом. При размещении на поверхности плиты с детали 5 часть силовых линий магнитного поля замыкается через крышку 3 ниже слоев, а часть, огибая немагнитной прослойкой, перекрытия деталью 5, замыкается через нее, обеспечивая притяжеиие. Сила притяжения в таких плит значительно ниже, чем у плит, имеющих сквозные прослойки. Заполнение канавок 4 немагнитным материалом необходимо, иначе канавки будут заполняться ферромагнитной стружкой и сила тяжести будет уменьшаться.
Сила притяжения электромагнитной плитой в большой степени зависит от материала и размеров закрепляемой детали, от числа деталей на ее поверхности, от положения детали на плите и от конструкции плиты. Сила притяжения в современных електромагиитних плит в зависимости от класса точности колеблется в пределах 15 - 25 Н на единицу площади (см2).
18.10.2. Принцип работы электромагнитной плиты
При работе электромагнитная плита нагревается, а при выключении охлаждается. Это вызывает движение воздуха через все зазоры, в результате чего внутрь плиты может попадать охлаждающая жидкость. Кроме того, в результате различннх коэффициентов линейного расширения материала полюсов, крышки и немагнитных слоев вблизи мест соединения возможно появление микротрещии. Позтому при конструировании электромагнитных плит важно предусмотреть защиту катушек плиты от воздействия охлаждающей жидкости. Для этого внутреннюю полость плиты заливают битумом, а иногда минеральным маслом.
Катушки отдельных полюсов электромагнитной плиты чаще всего соединяют последовательно. Если переключатель SА находится в положений, указанном на схеме, привод движения плиты или стола может быть включен только при включенных электромагнитах. В этом случае обмотка электромагнитной плиты УН получает питание от вьпрямителя УС, подключенного к сети через трансформатор ТУ. Услуги ¬ ледовательно с этой обмоткой "включена катушка реле тока УК, замыкает контакт которого включен последовательно с катушкой контактора КМ. Если в результате какой-либо аварии питания электромагнитной плиты прекратится, реле тока УК замыкающим контактом разорвет цепь катушки КМ и двигатель привода плиты или стола ( часто и двигатель привода главного движения) отключится. Пробой изоляции обмотки электромагнитной плиты или ее отключения в данном случае исключен. Цепь обмотки после отключения плиты остается замкнутой на выпрямитель.
Рисунок 18.10. Схема включения электромагнитной плиты
Вследствие остаточного магнетизма стальные детали после обработки часто бывает трудно снять с плиты. Для съема деталей через обмотку электромагнитной плиты после окончания обработки в течение некоторого времени пропускают небольшой ток противоположного направления.
18.10.3. Недостатки электромагнитных плит и столов
Электромагнитные плиты и столы имеют следующие недостатки. Сила прижима заготовок недостаточна для обработки детали с большими припусками. При аварийном перерыве в питаний обмотки электромагнитной плиты, даже при автоматическом отключении двигателя привода главного движения, в результате сил инерции вращающихся масс привода происходит срыв детали с поверхности плиты. Кроме того, электромагнитные плиты и столы требуют специальных блоков вопрос. Перестановка их с одного станка на другой требует много времени.
Частично лишены этих недостатков плиты с постоянными магнитами, которые все чаще используются в станкостроении. Сила притяжения в них на единицу площади (см2) в зависимости от класса точности колеблется в пределах 16-30 Н. Долговечность плит с постоянными магнитами в 3-4 раза превосходит долговечность электромагнитных плит. На основе постоянных магнитов изготавливают магнитные плиты и патроны. Плита имеет корпус, внутри которого расположен пакет, набранный из постоянных магнитов 2. Между ними помещены бруски 1 из мягкой стали, отделенные от магнитов
Рисунок 18.11. Плита с постоянными магнитами
прокладками 6 из магнитного материала. Постоянные магниты изготовлены из специального сплава и имеют форму пластин. Пакет взыскан латунными болтами 8; снизу он опирается на основание 3, вьполненное из мягкой стали, а сверху накрыт плитой 5 также из мягкой стали. Плита 5 имеет немагнитные слои, отделяющие часть ее поверхности находится под полюсами. Корпус 4 плиты выполнен из силумина или немагнитного чугуна. Деталь 7 из ферромагнитного материала, возложена на плиту 5, притягивается находятся под ней полюсами; силовые линии магнитного поля полюсов замыкаются через деталь.
Для съема детали с электромагнитами плиты полюсный пакет сдвигают. При таком положений полюсов их магнитные потоки замыкаются, минуя деталь 7 (штриховая линия). При этом деталь можно легко снять. Пакет перемещают вручную с помощью эксцентрика (не показано на рисунке). Внутреннюю полость плиты заполняют узком антикоррозионным смазочным материалом, который уменьшает силу, необходимую для смещения блока с магнитами. В промышленности применяют стационарные, поворотные, синусные, разметочные, шабровочные и другие плиты с постоянными магнитами.
В последнее время начали применять ферритные керамические постоянные магниты. Они отличаются высокой силой притяжения. Плиты с такими магнитами успешно применяют на фрезерных, строгальных и других станках.
Рисунок 18.12. Демагнетизатор
Для удаления остаточной намагниченности деталей используют специальные розмагничувачи устройства - демагнетизатор. Демагнетизатор, показания на рис., Предназначенный для размагничивания деталей массового производства, например колец шарикоподшипников.
Детали, которые нужно размагнитить, скользят по наклонному мостике 1 из немагнитного материала. При этом они проходят внутри катушки 2, питаемый переменным током и, поддаваясь перемагничивания переменным током, теряют остаточную намагниченность. Интенсивность поля ослабевает по мере удаления подвижной детали от катушки 2. Демагнетизаторы устанавливают на станках.
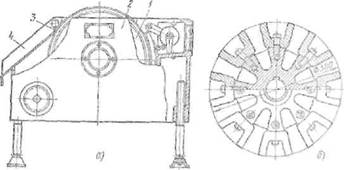
Рисунок 18.13. магнитный сепаратор
При работе шлифовальных станков нередко применяют магнитные сепараторы (фильтры). Их исиользуют для очистки смазочноохлаждающих жидкостей от очень мелкой ферромагнитной стружки. Такой сепаратор имеет ротор 1, у которого до металлического основания, посаженного на вал, иривинчено восемь рядов подковообразных постоянных магнитов. Каждый ряд имеет шесть магнитов. Магниты закрыты тонким листом немагнитного металла, который образует гладкий цилиндр с полюсами на поверхности. Отдельный электродвигатель вращает ротор в баке 2, через который проходит СОЖ. Слой жидкости между стенкой бака 2 и поверхностью ротора подвергается воздействию магнитного поля. Ферромагнитная стружка притягивается к поверхности ротора и затем счищается скребком 3 в лоток 4. При таком фильтровании вместе с ферромагнитными частицами с СОЖ удаляется до 80% неферромагнитных частиц, в том числе абразивных.
Контрольные вопросы:
1. Что такое муфта?
2. Какие преимущества у электромеханических муфтах?
3. Где используются электромеханические муфты?
4. Каково назначение в феропорошкових муфт трения?
5. От чего зависит коэффициент мощности привода с ЭМК?
6. называют электромагнитными плитами?
7. Из чего состоит электромагнитная плита?
8. Какие недостатки имеют электромагнитные плиты и столы?
9. Что нужно сделать чтобы снять детали с электромагнитной плиты?
СОДЕРЖАТЕЛЬНЫЙ МОДУЛЬ 6: АПАРАТУРА РЕЛЕЙНО- КОНТАКТНОГО УПРАВЛЕНИЕ
Тема 19. Аппараты релейно-контакторного управления двигателями постоянного тока (ДПТ)
19.1. Релейно-контактный управления электроприводами
19.2. Общие сведения о схемах управления
19.3. Схемы управления асинхронным двигателем с фазным ротором
Для выполнения функций управления электроприводами, различных по содержанию и целям, нужны соответствующие системы управления, отличающиеся по составу элементов и степени сложности.
Пуск в ход, перевод поводу с одной скорости на другую, реверсирования, торможения и другие относительно простые функции успешно выполняются системами управления, построенными на основе релейно-контактной аппаратуры, если число срабатываний отдельных аппаратов в час невелико.
Релейно-контактных системы относятся к типу разомкнутых систем, определяет особенностью которых является полная независимость регулирующего воздействия от регулируемой величины. Иначе говоря, в разомкнутой системе управляющая информация идет в одном направлении - от источника к приемнику, а обратные связи отсутствуют.
19.2. Общие сведения о схемах управления.
В понятие «элементы схемы» входят аппараты, машины, приборы в целом или их части, выполняющие в схеме определены функции (катушки, контакты, предохранители и т.п.). Отдельные элементы изображают условными графическими обозначениями, причем располагают их, руководствуясь только соображениями удобства начертания и чтения схем, не обращая внимания на действительное расположение элементов в установке. Связи между элементами наносят наиболее короткими линиями, по возможности избегая пересечений.
Этим условиям лучше других отвечают разнесены схемы, на которых элементы, конструктивно относятся том же аппарату, приборные, но выполняющие самостоятельные функции, располагают раздельно. Например, силовые контакты контактора, включающих электродвигатель в сеть входят в силовую цепь, а катушка того же контактора находится в цепи управления.
В электрических аппаратах различают контакты замыкающие (с) и замыкает (р). Если аппарат находится в отключенном положении (в катушке электромагнитного аппарата нет тока, кнопка с пружинным возвратом отпущенная), то его замыкающие контакты разомкнуты, а размыкающие замкнуты. Такое положение контактов называют нормальным или начальным; в этом положении их изображают на принципиальных схемах. Кроме условных графических обозначений на схемах применяют обозначения буквенные и цифровые. Каждый аппарат имеет свое буквенное обозначение, относится ко всем элементам схемы, конструктивно принадлежащем этому аппарату. Если таких аппаратов немного, то после буквенного обозначения ставят порядковый номер аппарата. Например, обозначение РП2 по ЕСКД расшифровывается так: реле промежуточное № 2.
![]()
Рисунок 19.1. Пусковая диаграмма с тремя степенями сопротивления пускового резистора
Для того чтобы облегчить чтение схем, в них выделяют силовые цепи двигателей и генераторов (эти цепи иногда называют главными) и цепи управления (вспомогательные). Силовые цепи изображают утолщенными линиями, а цепи управления - тонкими.
Типовые узлы схем управления пуском электродвигателей постоянного тока. В процессе пуска электродвигателя изменяются скорость, ток, момент и другие характеристики режима.
Автоматизация пуска не только облегчает ввод поискового процесса, но позволяет устранить возможные ошибки оператора, повышает производительность механизмов.
На рисунке показана пусковая диаграмма с тремя степенями сопротивления пускового резистора, рассчитанными так, чтобы ток изменялся в пределах допустимых величин I1, I2, причем от I1 до I2 ток уменьшается плавно в связи с ростом скорости, а от I2 к I1 - прыжком в результате выключения ступени пускового реостата. Пределы изменения тока выбирают из двух условий: допустимых толчков нагрузки и возможно большего сокращения общего времени пускового процесса. Исключать ступени пускового резистора, как видно из диаграммы, надо при определенной частоте вращения ротора (n1, n2, ПО), определенном токе (I2) и в определенные моменты времени (t1, t2, t з) - Значит, управлять пуском можно в функции скорости или пропорциональной ей э обмотки якоря, в функции тока, в функции времени. Для управления пуском необходимо контролировать одну из этих величин и в зависимости от результатов контроля влиять на соответствующий аппарат в схеме управления.
Для примера рассмотрим узлы некоторых схем управления. Управление в функции ЭДС с. Обмотки контакторов управления КУ1, КУ2, Ку3 включены параллельно обмотке якоря двигателя, поэтому на их зажимах напряжение зависит от ЭДС обмотки якоря и выражается равенством Uk = IRn + E.
Процесс пуска начинается с нажатием кнопки КНП, в результате чего устанавливается ток в обмотке линейного контактора КЛ, срабатывает и силовыми контактами КЛ включит двигатель М в сеть при большом сопротивлении в цепи якоря (все три ступени R1, R2, R3 пусковые резисторы последовательно включены в цепь якоря), поэтому ток I = I1, а напряжение на зажимах двигателя и на обмотках контакторов управления КУ1, КУ2, Ку3 в начальный момент времени имеет величину UKO = IiRЯ, потому что э Ео = 0 Контакторы управления настроены так, что этого напряжения для их срабатывания недостаточно.
![]()
Рисунок 19.2. Узлы схем управления
С ростом скорости увеличивается э и уменьшается ток в якоре, что к моменту времени t1 достигают величин Е1, I2. В этот момент срабатывает контактор КУ1 (он настроен на напряжение срабатывания UK1 = I2 / Rя + E1). Замыкаются контакты К.У1 и первая ступень резистора (R1) выводится из цепи якоря. В результате этого ток снова увеличивается до I1, а скорость и э продолжают увеличиваться и в момент времени t2 достигают величин Е2 и I2; при напряжении на зажимах якоря U2 = I2Rя + E2 срабатывает контактор КУ2, исключается вторая ступень резистора в цепи якоря. Далее схема работает аналогично и после срабатывания Ку3 исключается третья (последняя) степень пускового резистора, а двигатель выходит на естественную характеристику.
Управление в функции тока. В этом случае в цепь якоря двигателя включают пусковой резистор и, кроме того, по числу его ступеней - столько же токовых реле.
О принципе управления пуском двигателя дает полное представление узел схемы на рисунке 19.2, б, где показаны одна ступень пускового резистора R1 и одно Токовое реле РТ1. В результате замыкания в силовой цепи контакта КЛ линейного контактора рабочее напряжение сети подается в цепь якоря и на обмотку блокирующего реле РБ.
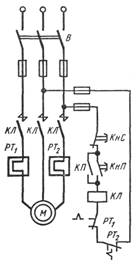
Рисунок 19.3. Схема принципа управления пуском двигателя
Ток в цепи якоря ограничен пределом I1 (см. Рисунок 19.3), так как в нее введен пусковой резистор R1 (контакт КУ разомкнут). Значение тока I1 достаточно для срабатывания токового реле PT1, что размыкает нормально замкнутый контакт в цепи управления раньше, чем замкнется в этой же цепи контакт реле РБ, так как собственное время срабатывания реле РТ1 выбирается меньше, чем в реле РБ. Такое действие этих реле не позволяет включиться контактор ускорения КУ до тех пор, пока ток в якоре уменьшается до значения I2, равного тока отпускания реле PT1.
Когда ток якоря достигает этого значения, контакт реле РТ 1 в цепи управления замыкается и возникает ток в катушке контактора КУ. Этот контактор срабатывает и, замыкая силовой контакт КУ в цепи якоря, замыкает накоротко ступень пускового резистора. Ток якоря увеличивается скачком, но цепь катушки контактора остается замкнутым блоком-контактом этого же контактора, включенным параллельно контакторы РТ1.
Принцип управления в функции времени рассмотрен далее при разборе работы схемы автоматического управления пуском асинхронного двигателя с фазным ротором.
Схемы магнитных пускателей. Пуск, остановка, реверсирование асинхронных двигателей большой мощности с короткозамкнутым ротором осуществляют обычно с помощью магнитных пускателей.
Магнитный пускатель- аппарат, состоящий из контактора переменного тока и двух тепловых реле, смонтированных в общем кожухе. Реверсивный магнитный пускатель имеет два контактора, один из которых включит двигатель «вперед», другой - «назад». В схеме рисунок 19.3 силовую цепь и цепь управления подключены к одному источнику напряжения - электросети переменного тока. Несмотря на предельную простоту, схема выполняет несколько важных функций управления. Она позволяет осуществлять дистанционный пуск и остановку двигателя, защищать двигатель от перегрузок и коротких замыканий, автоматически выключает двигатель в случае значительного снижения или исчезновения напряжения в сети.
Для того чтобы включить двигатель, нажимают пусковую кнопку КНП, в результате чего устанавливается ток в катушке контактора КЛ. Контактор срабатывает и, замыкая свои контакты в силовой цепи, включит двигатель в сеть. После срабатывания контактора кнопку КНП можно отпустить. Для остановки двигателя его отключают от сети нажатием кнопки КНС («Стоп»). В катушке контактора ток прерывается, контактор и его контакты возвращаются в исходное положение.
Двигатель отключается от сети не только кнопкой КНС, но и в случае срабатывания хотя бы одного из тепловых реле PT1, Рт2, служащие для защиты двигателя от перегрузок. Нагревательные элементы тепловых реле находятся в силовой цепи и в случае длительной перегрузки двигателя реле срабатывает и размыкает свой контакт в цепи управления.
С целью быстрого подключения электродвигателя от сети при коротком замыкании в силовой цепи и в цепи управления установлены плавкие предохранители. Двигатель отключается от сети контактором и в случае значительного снижения или исчезновения напряжения в сети, как только ток в катушке контактора уменьшится до величины тока отпуска.
На рис. показана схема управления с помощью реверсивного магнитного пускателя, в которой контакторы обозначены KB (вперед) и КН (назад).
![]()
Рисунок 19.4. схема управления с помощью реверсивного магнитного пускателя
19.3. Схемы управления асинхронным двигателем с фазным ротором
Одна из схема ручного управления пуском асинхронного двигателя с фазным ротором с помощью кулачкового контроллера показана на рис. Кулачковый контроллер в данном случае имеет девять выключателей (I-IX). Поворачивая рукояткой вал 1, его можно установить в пяти позициях «вперед» и «назад». Замкнутом положению контактов выключателя соответствует точка на схеме позиций. В позиции 0 все контакты разомкнуты, двигатель отключен, хотя один провод из сети подведен к зажиму С2 статора; пусковые резисторы R1, R2, R3 введены целиком и соединены в звезду.
Включение «вперед». В позиции 1 - замкнутые выключатели 2 и 4, статор соединен с сетью, ротор вращается при полном пусковом опоре. В позиции 2 остаются замкнутыми выключатели, IV и дополнительно замыкается V и часть резистора R1 замыкается накоротко; затем по мере увеличения частоты вращения (разгона двигателя) рукоятка последовательно возвращается в позициях 3, 4, 5 и в результате каждого поворота выводится часть одного из резисторов в цепи ротора. В позиции 5 пусковые резисторы полностью исключены и двигатель работает с короткозамкнутым ротором.
В схеме автоматического управления, изображена на рис.14, сопротивление в цепи ротора меняется в необходимом порядке с помощью контакторов КП, К.У1, КУ2.
Кроме пуска в ход схема позволяет изменять направление вращения, скорее затормозить ротор после выключения двигателя, защитить двигатель от перегрузки и короткого замыкания.
Одна из особенностей схемы заключается в том, что аппараты управления получают питание от источника постоянного тока. Перед пуском двигателя КОМАНДОКОНТРОЛЛЕР УК необходимо поставить в нулевое положение, затем подать напряжение в цепь управления рисунок 19.5, б и силовую цепь рисунок 19.5, а (замкнуть выключатели ВА и В).
Команду для запуска двигателя падают поворотом рукоятки командоконтроллера в одно из пусковых положений «вперед >> или« назад ». После этого схема работает автоматически.
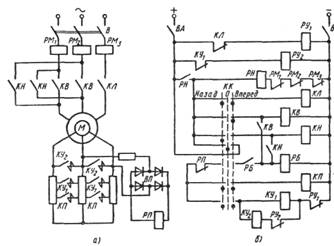
Рисунок 19.5. Цепь управления; силовую цепь.
В результате замыкания контактов В в цепи управления получают питание реле ускорения РУ1 и РУ2 и через командоконтроллер - реле напряжения РН. Реле ускорения размыкают свои контакты в цепи катушек контакторов ускорения КУ1 и КУ2.
В положении «вперед» включаются контакторы КЛ, KB и реле РБ. Замыкаются контакты KB и РБ в цепи контактора КП. В цепи ротора имеется реле РП, что получает питание через выпрямитель ВП, на вход которого подается линейное напряжение цепи ротора. В неподвижном состоянии ротора это напряжение недостаточна для срабатывания реле РП, поэтому контакт РП в цепи контактора КП остается замкнутым. Контактор КП срабатывает и замыкает контакты в цепи ротора и этим шунтирует одну степень резисторов. Эта степень в процессе пуска не принимает участия и пусковыми являются следующие две ступени.
В результате срабатывания контакторов КЛ и KB к обмоток статора подается напряжение сети (контакты КЛ и KB в цепи двигателя замкнулись) и одновременно разомкнулся контакт КЛ в цепи реле РУ1, что выдержку времени при отпускании.
Таким образом, ротор разгоняется при полном пусковом сопротивлении до тех пор, пока разомкнут контакт РУ1 в цепи контактора КУ1.
По истечении времени выдержки контакт РУ 1 замыкается, срабатывает контактор КУ 1 и, замкнув контакты КУ1 в цепи ротора, исключает одну пусковую степень резистора.
Одновременно размыкается контакт КУ1 в цепи реле РУ2, что также выдержку времени при отпускании. По истечении этого времени замыкается контакт РУ2 в цепи контактора Ку2, что срабатывает и исключает второй пусковой степень резистора. С этого момента двигатель работает на естественной механической характеристике.
Чтобы изменить направление вращения ротора, то командоконтроллер надо перевести в положение «назад». При этом нельзя проходить нулевого положения, в котором вся схема управления вернется в исходное состояние. В положении «назад» включаются контакторы КЛ и КН и меняется чередование фаз на входных зажимах двигателя. Но ротор двигателя по инерции продолжает вращаться вперед, следовательно, возникает режим противовключения, вследствие чего происходит быстрое торможение.
В начале торможения напряжение в цепи ротора достаточно большая, реле РП срабатывает и размыкает свой контакт в цепи контактора КП, для того чтобы он не сработал преждевременно. Поэтому в процессе торможения ротора в его цепь включены не только пусковые ступени резистора, но и степень противовключения.
Реле РП запрет свой контакт только тогда, когда торможение закончится и ротор практически остановится, после чего схема управления осуществит пуск двигателя «назад».
Надо заметить, что реле блокировки РБ имеет некоторую выдержку времени при срабатывании для того, чтобы реле РП успело разомкнуть свой контакт в цепи контактора КП.
Для защиты двигателя от коротких замыканий и перегрузки в схеме имеется максимальную защиту (реле РМ1, РМ2, РМ3) и защита от недопустимого снижения напряжения (реле РН).
Контрольные вопросы:
1. Что такое магнитный пускатель?
2. К какому типу относятся релейно-контактных системы
3. Охарактеризуйте схемы управления асинхронным двигателем с фазным ротором
4. Как защитить двигатель от коротких замыканий и перегрузки
Тема 20 Аппараты дистанционного управления асинхронными двигателями (АД)
20.1. Магнитный пускатель
20.2.Реверсивные релейно-контакторные схемы управления электродвигателями (на самостоятельную проработку)
20.2.1 Схема управления пуском трехфазного асинхронного двигателя
20.1. Магнитный пускатель
Магнитный пускатель - это комплектное устройство, предназначенное главным образом для пуска трехфазных асинхронных двигателей. Основной составной частью магнитного пускателя является трехполюсный контактор переменного тока. Кроме того, контактор имеет кнопки управления и термальное реле.
Схема включения трехфазного асинхронного двигателя с короткозамкнутым ротором показана на рис.20.1 Для пуска электродвигателя М нажимается кнопка SB1 («Пуск»). Через катушку контактора КМ протекает ток, срабатывает электромагнит контактора, и замыкаются все его контакты, которые на схеме обозначены теми же буквами КМ. Силовые контакты КМ подключают на трехфазное напряжение обмотки электродвигателя М.
![]()
Рисунок 20.1.Схема включения трёхфазного АД
![]()
Рисунок 20.2. Конструкция нереверсивного асинхронного электродвигателя с свиного магнитного пускателя магнитным пускателем
Параллельно кнопки SB1 подключены блокировочные контакты КМ. Поскольку они замкнулись, то после отпускания кнопки SB1 катушка контактора получает питание по этим контактам. Итак, для включения электродвигателя нужно все время держать кнопку нажатой, достаточно ее один раз нажать и отпустить. Для остановки электродвигателя служит кнопка SB2 («Стоп»), при нажатии которой разрывается цепь питания контактора КМ. Для защиты электродвигателя от перегрева используются термальные реле FP1 и FP2, чувствительные элементы которых включаются в две фазы электродвигателя, а контакты размыкания, обозначенны теми же буквами, включены в цепь питания катушки контактора КМ. Для защиты самой схемы управления используются плавкие предохранители FV. На схеме показан переключатель Р, обычно замкнутый. Его размыкают лишь в том случае, когда собираются проводить ремонтные работы. Подобная схема является типичной, она применяется во всех случаях, когда не требуется изменение направления вращения (реверс) электродвигателя и интенсивное (принудительное) торможение.
На рисунке 20.2 показана конструкция нереверсивного магнитного пускателя, который смонтирован в ящике с открывающейся крышкой. Электромагнитный механизм 1 контактора при срабатывании перемещает трех подвижных контакты 2, размещенных в дугогасительных камерах. В то же время переключаются блокировочные контакты 3. Последовательно с двумя главными контактными узлами включены термальные реле 4.
![]()
Рисунок 20.3. Схема включения трехфазного асинхронного электродвигателя с реверсивным магнитным пускателем
Кнопки «Пуск» и «Стоп» обычно находятся вне ящиком пускателя, они размещены на пульте управления под рукой у рабочего. Кнопка «Стоп» имеет красный цвет. Реверсивная схема включения трехфазного асинхронного двигателя показана на рисунке 20.3 Для того, чтобы реверсировать (изменить направление вращения) трехфазный асинхронный двигатель, необходимо изменить порядок чередования фаз на обмотке статора. Например, если для прямого вращения фазы подключались в последовательности АВС, то для обратного вращения необходима последовательность АСВ. Поэтому в состав реверсивного магнитного пускателя входят два контактора: KB для вращения вперед и КН для вращения назад. Кроме того, реверсивный магнитный пускатель имеет три кнопки управления и термальные реле. Во многих случаях в комплект магнитного пускателя входят пакетный переключатель и плавкие предохранители. Схема, которая приведена на рисунке 20.3, работает следующим образом.
Для включения электродвигателя М в прямом направлении необходимо нажать кнопку SB1 («Вперед»). При этом срабатывает контактор KB и своими силовыми контактами подключает к трехфазной сети обмотки электродвигателя. В то же время блокировочные контакты KB разрывают цепь питания катушки контактора КН, благодаря чему исключается возможность одновременного включения обоих контакторов. Для включения электродвигателя в обратном направлении необходимо нажать кнопку SB2 («Назад»). В этом случае срабатывает контактор КН и своими силовыми контактами подключает к трехфазной сети обмотки электродвигателя. Последовательность с ¢ единения фаз теперь иная, чем при срабатывании контактора КБ: две фазы из трех поменялись местами. При срабатывании контактора КН его блокировочные контакты разрывают цепь питания катушки контактора КВ. Легко увидеть, что при одновременном включении контакторов KB и КН произошло бы короткое замыкание двух линейных проводов трехфазной сети друг к другу. Для того, чтобы исключить такую аварийную ситуацию, нужны блокировочные контакты, размыкающих контакторы KB и КН. Итак, если последовательно нажать обе кнопки (SB1 и SB2), то включится только тот контактор, кнопка которого была нажата раньше.
Для реверса электродвигателя нужно предварительно нажать кнопку SB3 («Стоп»). В этом случае блокировочные контакты готовят круг управления для нового включения. Для надежной работы необходимо, чтобы силовые контакты контактора разомкнулись раньше, чем произойдет замыкание блокировочных контактов в цепи другого контактора. Это достигается с помощью соответствующего регулирования положения блокировочных контактов по ходу якоря электромагнитного механизма контактора. Для блокировки кнопок SB1 и SB2 используются блокировочные контакты соответствующего контактора, замыкаются, которые подключены параллельно кнопке.
Необходимо исключить одновременное срабатывание обоих контакторов, для чего используют двойное или даже тройной блокировки. Для этой цели в схеме применяют кнопки SB1 и SB2. Например, кнопка SB1 при нажатии замыкает свои контакты в кругу контактора KB и разрывает свои контакты в кругу контактора КН. Аналогично работает двухцепной кнопка SB2. Кроме того, реверсивные магнитные пускатели могут иметь механическую блокировку с перекидным рычагом, препятствующим одновременном срабатыванию электромагнитов контакторов. Контакты термальных реле FP1 и FP2, включенные в две фазы обмотки электродвигателя, отключают цепь питания катушек обоих контакторов при длительном протекании большого тока, чтобы не допустить перегрева обмоток. Для защиты схемы управления служат плавкие предохранители FV.
Магнитные пускатели и контакторы выбирают по номинальным токами электродвигателя с учетом условий эксплуатации. В промышленности применяются магнитные пускатели серии ПМЕ и ПМЛ с прямохiднимы контакторами и серии ПАЕ с подвижной системой поворотного типа.
20.2. Реверсивные релейно-контакторные схемы управления электродвигателями (на самостоятельную проработку)
20.2.1 Схема управления пуском трехфазного асинхронного двигателя
Рассмотрим схему управления пуском трехфазного асинхронного двигателя с короткозамкнутым ротором с помощью нереверсивного контакта Л. При нажатии кнопки «Пуск» замыкается цепь питания обмотки контакта Л, что срабатывает и своими силовыми контактами Л подключает к сети обмотку статора двигателя М. Одновременно замыкаются контакты 3-5 этого контакта, шунтируя кнопку «Пуск», чем обеспечивается питание обмотки контакта Л независимо от состояния этой кнопки.
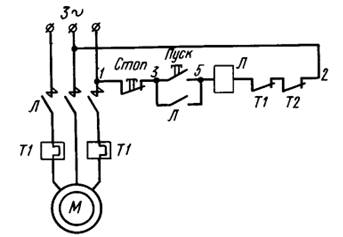
Рисунок 20.4. Схема управления пуском трехфазного асинхронного двигателя
Двигатель отключается нажатием кнопки "Стоп". При этом размыкается цепь питания обмотки контакта Л, что приводит к размыкания всех его силовых контактов Л, что отключают обмотку статора двигателя от сети, и контактов Л, что шунтирующих кнопку «Пуск». При отпускании кнопки "Стоп" цепь обмотки контакта остается разомкнут
В рассматриваемой схеме управления применен защиту двигателя от перегрузок с помощью тепловых реле Т1 и Т2. Тепловое реле состоит из нагревательного элемента, включенного последовательно с силовым контактом Л, биметаллической пластины и размыкающие контактов, включенных последовательно в цепь питания обмотки линейного контактора Л. Если двигатель перегружен и потребляемый им ток превышает допустимое значение, то теплота, которая выделяется нагревательным элементом вызывает такой изгиб биметаллической пластины, при которой размыкаются контакты реле в цепи питания обмотки линейного контакта Л и двигатель отключается от сети.
На рисунке 20.4 показана схема управления трехфазным асинхронным двигателем в функции времени. При нажатии на кнопку «Пуск» замыкается цепь питания обмотки линейного контактору Л, что срабатывает и своими силовыми контактами Л подключает двигатель М к источнику переменного тока и обмотку реле динамического торможения РДГ к источнику постоянного тока. При включении контакта Л размыкаются его контакты 1-9 в цепи контакта торможения Г и замыкаются контакты 3-5, шунтируя кнопку «Пуск». При срабатывании реле РДГ замыкаются контакты 9-11 в цепи контакта торможения Г, но этот контакт не работает, потому что цепь его обмотки остается разомкнут контактами 1-9.
Для остановки двигателя нажимают кнопку "Стоп". При этом прекращается питания обмотки контакта Л и двигатель отключается от сети. Одновременно замыкаются контакты 1-9 в цепи контакта Г, срабатывает и своими контактами Г подключает обмотку статора двигателя к источнику постоянного тока, что и приводит к динамического торможения двигателя. Одновременно размыкаются контакты 5-7, что исключает случайное включение контакта Л. Резистор rт предназначен для ограничения постоянного тока в обмотке статора. Однако протекания тока в обмотке статора недолговременное, так как при отключении контакта Л размыкаются его контакты в цепи питания обмотки реле РДГ, что ведет к размыкания с некоторой временной задержкой контактов РДГ (9-II) в цепи питания обмотки контакта торможения Г. В результате обмотка статора двигателя отключается от сети постоянного тока через некоторое время после отключения двигателя от трехфазной сети. Выдержка времени на размыкание контактов реле РДГ устанавливается опытным путем, с учетом времени, необходимого на торможение двигателя.
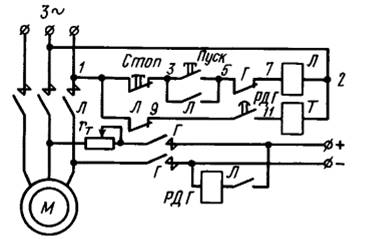
Рисунок.20.5 Схема не реверсивного управления трехфазным асинхронным двигателем с динамическим торможением
Рассмотрим схему реверсивного управления трехфазным асинхронным двигателем с торможением противключением в функции скорости. Подключение двигателя к трехфазной сети возможно через две группы силовых контактов: контакты В, при замыкании которых ротор двигателя вращается в одном направлении ("Вперед"), контакты Н, при включении которых ротор вращается в другом направлении ("Назад"). Схема содержит реле скорости PШ, механически соединено с валом двигателя М. Контакты этого реле РШН и РШВ включены в электрическую схему управления двигателем. Реле скорости Pш работает следующим образом. Постоянный магнит 1, вал которого соединен с валом двигателя М, вращается внутри короткозамкнутой обмотки 2 и приводит в ее стержнях токи. Взаимодействуя с магнитным полем постоянного магнита, эти токи создают электромагнитный момент, под действием которого короткозамкнутая обмотка возвращается и упором 6 действует на контакты 5 или 7, вызывая их замыкания с контактами 4 или 8 (в зависимости от направления вращения ротора двигателя).
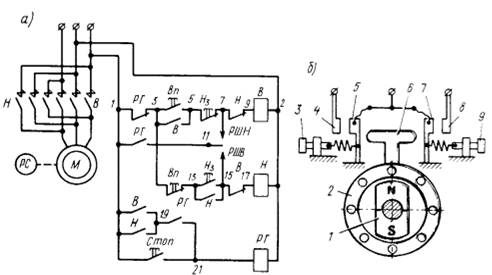
Рисунок. 20.6 Схема реверсивного управления трехфазным асинхронным двигателем с короткозамкнутым ротором с торможением противключенням в функции скорости (а) и устройство реле скорости (б)
Для включения двигателя на вращение "Вперед" нажимают удвоенную кнопку Сп. При этом контакты 3-5 замыкает цепь катушки контактоpa В и одновременно размыкаются контакты 3-13, что исключает возможность случайного замыкания цепи катушки контакта Н, что привело бы к короткому замыканию в силовой части схемы двигателя. При срабатывании линейного контакта В замыкаются контакты 3-5, что шунтирующих кнопку Сп, и включаются силовые контакты У, присоединяют обмотку статора двигателя к сети. Одновременно размыкаются контакты 15-17, исключающие возможность включения контакта Н, и замыкаются контакты В (1-19). После пуска двигателя М срабатывает реле скорости Pш и его средний контакт 11 замыкается с крайним контактом РШВ. Для остановки двигателя нажимают кнопку "Стоп". При этом замыкаются контакты 1-21 подключаемых обмотку реле торможения РГ, при срабатывании которого размыкаются его контакты 1-3, отключающие катушку контактора В, замыкаются контакты 19-21 и 1-11 в цепи контактов реле скорости Pш (11-15 ). Вращение ротора двигателя вызывает срабатывание реле скорости Pш, и контакты 11-15 замыкаются. Отключение контактора В вызывает замыкание контактов 15-17, что ведет к срабатыванию линейного контактора Н. В результате силовые контакты В в цепи статора двигателя М размыкаются, а силовые контакты Н замыкаются и начинается торможение ротора двигателя противключенням. При уменьшении частоты вращения ротора до значения, равного 5-10% от номинального, момент на роторе реле уменьшается настолько, что замкнутая пара контактов 11-15 под действием пружины размыкается и процесс торможения прекращается, что исключает возможность возникновения реверса при торможении противключенням. Частоту вращения ротора, при которой происходит размыкание контактов реле, можно регулировать степенью сжатия пружин регулирующими винтами 3 и 9. Одновременно с отключением контактора Н и остановкой питания двигателя М размыкаются контакты 1-19, отключающие реле торможения РГ, и замыкаются контакты 7-9 в цепи питания обмотки контакта В. Контакты РГ (1-3) замыкаются, а контакты РГ (1-11) размыкаются. В результате схема становится готовой к следующему пуску двигателя.
Если после пуска двигателя в направлении вращения "Вперед" необходимо выполнить реверсирование, то есть изменить направление вращения ротора, то кнопку "Стоп" нажимать не нужно, а нужно нажать кнопку НЗ ("Назад"). При этом размыкаются контакты 5-7, отключающие контакт В, и замыкаются контакти13-15 подключаемых обмотку контакта Н к источнику питания, размыкаются контакты 7-9 и В (1-19) и замыкаются контакты Н (1-19) и 13-15. Силовые контакты В разомкнутся, а силовые контакты Н замкнутся. В результате ротор двигателя изменит направление вращения. Контакт 11 реле скорости PC разомкнется с контактом РШВ и замкнется с контактом РШН. Для отключения и торможения двигателя, как и в предыдущем случае, достаточно нажать кнопку "Стоп".
Рассмотрим схему нереверсивного управления пуском в функции времени двигателя постоянного тока параллельного возбуждения динамическим торможением. Пуск двигателя М в функции времени осуществляется с помощью реле ускорения РП1 и РП2. При кратковременном нажатии кнопки «Пуск» замыкается цепь питания обмотки контакта Л, при срабатывании которого замыкаются контакты 3-5, размыкаются контакты Л в цепи терморезистора rT, замыкаются контакты 7-2, включающих реле ускорения РП1, и замыкаются силовые контакты Л, что подключают к сети постоянного тока двигатель М. При этом начинается пуск двигателя, в цепь обмотки якоря которого включены элементы пускового резистора r1 + r2 (первый уровень пуска). Реле ускорения РП1 с выдержкой времени замедления замыкает своими контактами 9-7 цепь питания обмотки контакта ускорения П1, при срабатывании которого контакты П1 шунтирующих элемент пускового резистора r1. В результате разгон двигателя продолжается с элементом поискового резистора r2 в цепи якоря (второй уровень пуска). Одновременно замыкаются контакты 11-7, подключаемых обмотку реле ускорения РП2, которая срабатывает и с заданной выдержкой времени своими контактами 13-7 подключает обмотку контактора ускорения П2 к источнику. Контакт срабатывает и своими контактами П2 шунтирует элемент пускового резистора r2, двигатель будет включенным на полное напряжение сети. На этом процесс пуска заканчивается. резистора r2, двигатель будет включенным на полное напряжение сети..
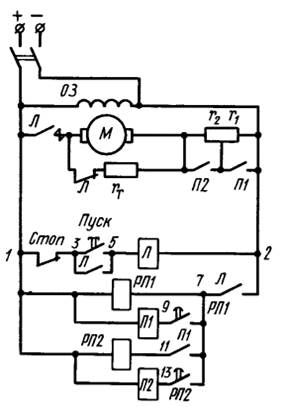
Рисунок 20.7. Схема не реверсивного управления пуском двигателя постоянного тока в функции времени с динамическим торможением
Для отключения двигателя необходимо кратковременно нажать кнопку "Стоп". При этом разомкнется цепь питания обмотки контактора Л, что своими контактами отключит якорь двигателя и цепи обмоток всех ускоряющих реле и контакторов от источника питания. Итак, разомкнутся контакты П1 и П2, что шунтирующих элементы пускового резистора r1 + r2, и схема будет подготовлена к следующему пуску двигателя. Одновременно замкнутся контакты Л в цепи резистора rT и двигатель переходит в режим динамического торможения.
Все операции, связанные с включением и отключением различных элементов в рассмотренных схемах, выполняются автоматически, то есть без участия человека. Только команды «Пуск» и «Стоп» в этих схемах выполняются человеком. Поэтому указанные схемы управления считают полуавтоматическими. Однако любая из этих схем, будучи включенной в систему автоматического управления, становится автоматической и все команды на включение, реверс и остановку двигателя будут выполняться управляющим электрическим сигналом, поступающим на обмотку реле, контакты которого используются вместо управляющих кнопок.
Контрольные вопросы:
1. Что такое магнитный пускатель ?
2. Где находятся кнопки «Пуск» и «Стоп»
3. Как выбирают магнитные пускатели и контакторы?
4. Из чего состоит тепловое реле?
5. Охарактеризуйте схему управления трехфазным асинхронным двигателем в функции времени.
6. Что происходит при нажатии кнопки "Вперед"?
7. Что необходимо сделать для отключения двигателя?
Содержательный модуль 7: Аппаратура электрической защиты
Тема 21. Аппараты электрической защиты
21.1. Аппараты электрической защиты
21.2. Автоматические выключатели (автоматы)
21.3. Автоматы максимального тока
21.4. Реле времени
21.5. Правила эксплуатации
21.6. Техническое обслуживание
21.7. Техника безопасности при работе с реле времени
21.8. Устройство и принцип действия
21.9. Основные технические характеристики
21.10. Схемы включения
21.11. Современные перспективные типы реле тока и реле напряжения
21.12. Тепловые реле: назначение, строение, принцип действия, пределы регулирования срабатывания (на самостоятельную проработку)
21.12.1.Теплови защитные устройства
21.1. Аппараты электрической защиты
Эти аппараты предназначены для защиты электроустановок от токов короткого замыкания. Их основной элемент - плавка вставка, разрушается под действием теплоты при больших значениях тока в ней. Материалом для плавких вставок служат медь и цинк. Последний не окисляется в пределах допустимых температур, позволяет сохранять рабочие характеристики плавкой вставки долгое время.

Рисунок 21.1. плавкие вставки
Для напряжений до 250 В и токов до 60 А применяют пробочные предохранители. Пробочный предохранитель состоит из основания, в которое вворачивается изменяемая при перегорании вставка, опирается на неподвижный контакт. Пробка изготовлена из керамического материала и снабжена двумя металлическими контактами, между которыми припаяна плавка вставка. Для защиты двигателей, электронагревательных установок и других устройств от токов короткого замыкания применяют трубчатые предохранители.
Рисунок 21.2. - Блок плавких предохранителей
Их типичная конструкция представляет собой трубку из электроизоляционного материала (фарфора, керамики, фибры и др.), В которой размещена плавкая вставка в среде воздуха, или различных наполнителей. Возникающая при плавлении вставки электрическая дуга, соприкасаясь с наполнителем, интенсивно охлаждается, и быстро гаснет. Для защиты электронных приборов применяют быстродействующие предохранители в виде тонкого слоя металла (серебра), на электроизоляционную основу
21.2. Автоматические выключатели (автоматы)
Автоматические выключатели (автоматы). Автоматы предназначены для отключения поврежденных участков электрической сети при возникновении в них аварийного режима, например короткого замыкания, снижение напряжения и др. В отличие от контактора автомат имеет измерительное устройство, определяет режим работы сети и сигнал, дающий на отключение.
Различают автоматы универсального, быстродействующие и тушения магнитного поля генераторов большой мощности. Универсальные автоматы предназначены для защиты установок постоянного и синусоидального токов. В указанном положении автомат отключен и силовое электрическую цепь между выводами разомкнут.
Включение автомата осуществляется вращением вручную рукоятки вокруг неподвижной оси О, по направлению движения часовой стрелки. При этом рычаги будут вращать рычаг вокруг неподвижной оси О в том же направлении. Замыкают цепь сначала, а потом главные контакты автомата. Одновременно при включении автомата сводится пружина, отключает.
При токе короткого замыкания в катушке ги электромагнита якорь под действием электромагнитной силы F3M перемещается, переводя рычаги за "мертвую" точку. Она соответствует такому положению рычагов, при котором линия является прямой. При этом автомат силой Fw пружины отключается, контакты размыкаются, а дуга, образующаяся между ними, происходит в дугогасительную камеру и гасится. Время отключения универсальных автоматов составляет десятые доли секунды. Система рычагов выполняет функции механизма свободного расцепления, что позволяет автомату отключаться в любой момент времени, даже в момент включения. Механизм свободного расцепления предотвращает возможность повторных несанкционированных циклов отключения и включения. Быстродействующие автоматы предназначены для защиты установок постоянного тока. Их время отключения составляет тысячные доли секунды и достигается применением поляризованных электромагнитных устройств, интенсивных дугогасительных устройств, а также упрощением кинематической схемы аппарата в системе взаимодействия измерительного элемента (расцепителя) и контактов. Пакетные выключатели. Такие выключатели предназначены для одновременного включения и отключения вручную нескольких цепей. Их набирают из неподвижных соосно-расположенных колец (пакетов) из электроизоляционного материала, внутри каждого из которых устанавливают коммутирующее устройство, связанное с общим валом. Рубильники. Рубильники служат для включения и отключения вручную приемников электрической энергии малой мощности и общих источников питания на распределительных щитах. Различают одно-, двух- и три полюсные рубильники. Все они имеют скользящие контакты Кнопки управления. Кнопки применяют для дистанционного управления электрическими аппаратами. Они могут выполняться как с самовозвратом в исходное положение, так и без него. Несколько кнопок, конструктивно оформлены в одном корпусе, образуют кнопочную станцию.
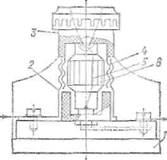
Рисунок 21.3. Автоматический выключатель.
21.3. Автоматы максимального тока
Для защиты двигателя постоянного тока и асинхронного двигателя с фазным ротором, пускаем реостатом, плавкие вставки подбирают на номинальную силу тока электродвигателя. Для короткозамкнутых асинхронных двигателей выбрать ее таким образом нельзя, так как она перегорит под действием пускового тока, превышает в этих электродвигателей номинальной в 5-7 раз.
Поэтому для асинхронных короткозамкнутых двигателей плавкие вставки выбирают по силе тока, в 2 - 2,5 раза меньше его пусковой величины. Вследствие кратковременности поискового процесса электродвигателей станков выбрана таким образом плавка вставка при пуске не успевает перегореть. Однако предохранитель с такой плавкой вставкой не защищает электродвигатель при значительных перегрузках, так как номинальная сила тока плавкой вставки вдвое и более превышает силу тока электродвигателя при полной его нагрузке. В этих условиях предохранитель защищает только провода схемы от коротких замыканий.
Сила тока, при которой перегорает плавкая вставка, находится в обратной зависимости от времени протекания тока. При токах короткого замыкания и при недопустимых перегрузках, приводящих к остановке электродвигателя, перегорание плавкой вставки происходит достаточно быстро. При силе тока, менее 200% номинальной, предохранитель недопустимо долго сохраняет цепь замкнутой.
В цепях управления могут возникать короткие замыкания, поэтому эти цепи защищают отдельными плавкими предохранителями, рассчитанными на небольшую силу тока. В этих случаях чаще используют резьбовые предохранители. На пластмассовом оснований 1 установлена втулка 2 из листового металла с резьбой, выполненной накаткой. В втулку 2 ввернута фарфоровая пробка 3 из укрепленной в ней металлической резьбовой втулкой 4. При этом плавка вставка 5, помещенная в патроне 6, вложенном в пробку 5, замыкает цепь контролируемого тока. Чтобы под влиянием вибраций пробка не могла откручивать, резьба на пробке имеет поперечную насечку. Патрон 6 заполняют кварцевым песком, что ускоряет гашение дуги.
21.4. Реле времени
Реле времени служат для создания выдержки времени в цепях автоматического регулирования, управления и сигнализации. Интервал времени с момента подачи напряжения на обмотку реле до момента изменения положения его контактов называется выдержкой времени.
Реле времени по конструкции делятся на электромеханические, электропневматические, программные, электронные.
Принцип устройства и работы часового механизма реле времени показан на рисунке 21.4. Под влиянием ведущей пружины заводится пусковым устройством реле времени (на рисунке 21.4 не показано), что ведет шестерня начинает вращаться в направлении, указанном стрелкой. Ее вращение передается на шестеренками 8, с которой жестко связана Храпова шестерня 2, имеющий косые зубы. При вращении по часовой стрелке зубы храповой шестерни цепляются за выступление, храповая пружины 3 и тянут ее и связанную с ней анкерную шестерню 1. Непосредственной связи между храповой и анкерной шестернями нет.
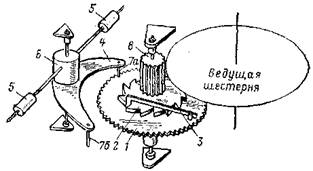
Рисунок 21.4 .. Устройство часового механизма реле времени
Анкерный шестерня 1 образует с анкерной скобой 4 так называемый анкерный или спусковой механизм, создающий выдержку времени. В показан на рис. 1 момент палец анкерной скобы седьмой вошел между зубами анкерной шестерни и остановил ее. Вместе с анкерной шестерней остановятся храповая шестерня 2, шестеренками 8, ведет шестерня и ее ось, на которой она укреплена вместе с подвижным контактом реле времени.
Палец 7а, остановив анкерную шестерню, сам получает удар, в результате чего анкерная скоба 4 поворачивается на своей оси, выводит палец седьмой из зубов анкерной шестерни и освобождает ее. При этом анкерная шестерня и сцеплена с ней храповая шестерня, шестеренками, что ведет шестерня и подвижный контакт свободно возвращаются до тех пор, пока анкерная скоба не вернется и введет свой второй палец 7б между зубами анкерной шестерни, чем снова остановит ее.
Таким образом, движение анкерной шестерни и подвижного контакта происходит не непрерывно, а прерывисто. Частота вращения анкерной шестерни, от которой зависит выдержка времени реле, определяется моментом инерции анкерной скобы, который можно регулировать изменением положения грузиков 5 на коромысле 6. При удалении грузиков от центра коромысла время действия реле увеличивается, а при приближении - уменьшается.
При снятии с обмотки реле напряжения оперативного тока оно мгновенно возвращается в исходное положение возвратной пружиной реле. При возвращении реле ведущая шестерня, шестеренками и храповая шестерня вращаются в обратном направлении. При этом зубы храповая шестерни скользят скошенной поверхностью по выступлении храповая пружины, а не задевая его. Благодаря этому анкерная шестерня остается неподвижной и, следовательно, часовой механизм не препятствует мгновенному возврату реле в исходное положение.
Устройство реле времени типов ЭВ-100 и ЭВ-200 показано на рис. 4. В этом реле времени ведущая пружина 8 нормально растянутая (заведена) и содержится в таком положении тем, что палец 4 упирается в верхнюю часть якоря 2. При подаче напряжения на обмотку реле 1 якорь 2, втягиваясь, сжимает возвратную пружину 3 и освобождает палец 4. Благодаря этому под влиянием освобожденной ведущей пружины 8 зубчатый сектор 9, укрепленный на оси 12, начинает вращаться и вращать сцепленные с ним шестерню 7, что в свою очередь вращает валик с укрепленной на нем контактной траверсой 10.
В самом начале вращения валика происходит его сцепления с ведущей шестерней 5 с помощью фрикционного устройства 11 на оси 6, что в данной конструкции реле выполняет функции храповой шестерни и храповая пружины. Ведущая шестерня 5 через шестеренками 13 и промежуточные шестерни 14 и 15 связана с часовым механизмом 16-18, что устройство, аналогичен рассмотренному на рис. 3. Часовой механизм обеспечивает движение контактной траверсы 10 с определенной скоростью. Поэтому выдержка времени от начала работы реле к замыканию контактов определяется расстоянием между начальным положением подвижного контакта 20 и неподвижными контактами 21 или контактами, проскальзывают, 22, которые для изменения уставок можно перемещать по шкале реле. Помимо контактов с регулируемой выдержкой времени, реле времени имеют переключающие контакты мгновенного действия 19. Переключение мгновенных контактов происходит при втягивании якоря.
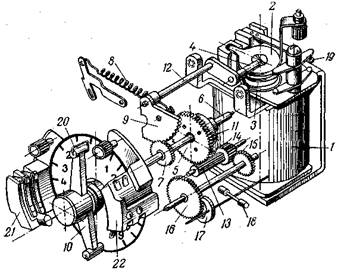
Рисунок 21.5. Устройство реле времени типов ЭВ-100, ЭВ-200
Реле времени типа ЭВ-100 выпускаются для работы на постоянном оперативном токе 24, 48, 110 и 220 В, а реле типа ЭВ-200 - на переменном оперативном токе 100, 127, 220 и 380 В. Реле времени переменного тока типов ЭВ-215 - ЕВ-245 выпускаются на напряжении 100, 127 и 220 В. В исходном положении обмотки этих реле находятся постоянно под напряжением. При этом ведущая пружина растянута и реле готово к действию. При снятии напряжения с реле контактами пусковых реле (или при его снижении или исчезновении по другим причинам) якорь реле отпадает и освобождает ведущую пружину, под влиянием которой реле срабатывает так же, как рассмотрен на рисунке 21.5. При подаче напряжения реле мгновенно возвращается в исходное положение
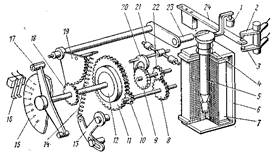
Рисунок 21.6. Электромеханическое реле времени ЭВ-132: 1 - поводок, 2, 3, 16, 17, 24 - контакты, 4 - пружина, 5 - якорь, 6 - магнитопровод, 7 - обмотка, 8, 18, 22 - зубчатые колеса, 9 - анкерная колесо, 10 - шестеренками, 11 - ведущее колесо, 12 - сцепление, 13 - скоба, 14 - пружина, 15 - шкала, 19 - сектор, 20 - анкерная скоба, 21 - противовес, 23 - палец
В электромеханическом реле времени ЭВ-132 (рисунок 21.6) при подаче напряжения на обмотку 7 якорь 5 практически мгновенно втягивается и поводком 1 переключает контакты 2, 3, 24 и освобождает палец зубчатого сектора устройства выдержки времени, выполненного в виде часового механизма. Основными элементами часового механизма является анкерная зубчатое колесо 9 из анкерной скобой 20 и противовесами 21.
Выдержка времени устанавливается перемещением контакта 16 относительно шкалы 15. Часовой механизм с в движение ведущей пружиной 14 усилия которой передается через шестеренками 10 на часовой механизм. Анкерный колесо 9, взаимодействуя с анкерной скобой, ступенчато прерывисто делает отсчет времени, при этом подвижный контакт 17 перемещается к контакту 16, а но истечении выбранной выдержки времени контакты 16, 17 замыкаются.
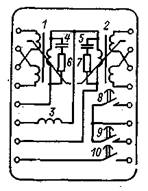
Рисунок 21.7. Схема внутренних соединений реле времени типа РВС
Схема внутренних соединений реле времени переменного тока типов РВМ-12 и РВМ-13 приведена на рис. 6, а конструктивная схема - на рис. 7. Реле содержит промежуточные трансформаторы, насыщаются, 1 и 2, синхронный электродвигатель 3 и контактную систему 8-10. Вторичные обмотки промежуточных что насыщаются трансформатор-зашунтуючимы конденсаторами 4, 5 из последовательно включенными резисторами 6, 7 для улучшения формы кривой напряжения, подводимого к обмотке электродвигателя. Первичные обмотки промежуточных трансформаторов, насыщаются, включаются в цепь трансформаторов тока элемента который защищает.
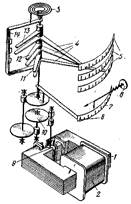
Рисунок 21.8. Устройство реле времени типа РВ
Конструктивно электродвигатель реле состоит из статора 1 (рисунок 21.8) с обмоткой 2, что вовлекается ротора 9 и замедляет редуктора 10. При подаче напряжения на обмотку статора электродвигателя его ротор втягивается в междуполюсное пространство и начинает вращаться с постоянной частотой, зависящей от частоты переменного тока . При втягивании ротора 9 происходит сцепление шестеренками, что находится на его оси, с редуктором 10, через который вращение ротора передается рамке 14 из подвижными контактами. По мере перемещения рамки 14 происходит замыкание подвижных контактов с неподвижными контактами: что проскальзывают 12 и 13 и упорными (конечными) 11.
После отключения поврежденного элемента исчезает ток в первичных обмотках промежуточных трансформаторов, насыщаются, и, следовательно, напряжение на обмотке статора электродвигателя. При этом ротор двигателя опускается и расположена на его оси шестеренками выходит из зацепления с редуктором. В результате этого под влиянием возвратной пружины 3 телефона рамка возвращается в исходное положение.
Реле снабжены указателями выдержки времени 4 на шкале 5, буксирной стрелкой 8, показывает на шкале 7 выдержку времени, вступившим реле времени, и квитирующей кнопкой 6.
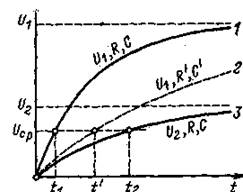
Рисунок 21.9. Изменение напряжения на конденсаторе реле времени: 1 - при напряжении питания U1, и параметрах схемы R и С; 2 - при напряжении питания U1 и параметрах схемы R 'и С' (R '> R или С'> С) 3 - при напряжении питания U2 и параметрах схемы R и С
Реле времени типа РВМ-12 имеет наибольшую выдержку времени 4 с, а реле времени типа РВМ-13 - 10 с.
При последовательном соединении секций первичных обмоток промежуточных трансформаторов, насыщаются, ток начала работы составляет менее 2,5 А, а при параллельном - менее 5 А. Потребляемая мощность реле не более 10 Вт.
В это время используется несколько типов полупроводниковых реле времени. В этих реле выдержка времени образуется за счет времени заряда конденсатора через резистор до определенного значения напряжения. Как известно, напряжение на конденсаторе в такой схеме (рисунок 21.10) плавно меняется со скоростью, прямо пропорциональной питающем напряжении и обратно пропорциональной емкости конденсатора или сопротивления резистора. Выдержка времени заряда конденсатора до напряжения Ucp будет тем больше, чем ниже напряжение питания и чем больше величины R и С.
Функциональная схема реле времени типа ВЛ-27 показана на рис. 9. Аналогичные функциональные схемы имеют реле типов ВЛ-37 и ВЛ-29.
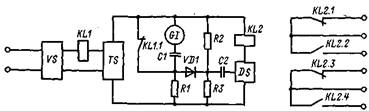
Рисунок 21.10. Функциональная схема реле времени типа ВЛ-27
Выдержка времени реле ВЛ-27 начинается при подаче через выпрямитель VS напряжения питания на схему. При этом срабатывает входящее реле KL1 и размыкает свой контакт KL1.1, начинает работать генератор импульсов GI, подключенный через стабилизатор TS, импульсами с выхода GI через резистор R1 заряжается конденсатор С1. Когда напряжение на конденсаторе достигает уровня опорного напряжения, обусловленного делителем напряжения на резисторах R2 и R3, открывается диод VD1, импульсы генератора GИ проходят через С2 на вход триггера DS и устанавливают его в положение, при котором подается напряжение на выходное реле KL2. Реле KL2 срабатывает и переключает выходные контакты.
Напряжение от выпрямителя на схему заряда подается через стабилизатор TS.
При снятии напряжения питания обесточивается реле KL1 и разряжает конденсатор С1. Триггер DS возвращается в исходное состояние. Реле KL отпадает, выходные контакты реле возвращаются в исходное состояние.
Реле времени серии ВЛ выпускаются для работы на постоянной оперативном токе напряжением 24 и 110 В, а также на переменном оперативном токе напряжением 110 и 220 В. Реле типов ВЛ-27 (шесть исполнений диапазона выдержек времени от 0,1-10 с до 2 200 с) и ВЛ-29 (один диапазон 0,1-10 мин.) выпускаются на напряжение питания 110 В постоянного, 110 и 220 В переменного оперативного тока. Реле ВЛ-37 выпускаются на те же диапазоны и реле ВЛ-27, но на напряжение постоянного оперативного тока 24 В.
Минимальное время подготовки реле в дежурную работы - 0,3 с, максимальное время возврата реле - 0,2 с. Мощность, потребляемая от сети, не превышает 8 В · А. Выходные контакты реле длительно выдерживают ток 4 А, коммутационная их способность: на постоянном токе - 25 Вт индуктивной нагрузки с постоянной времени 0,01 с; на переменном токе - 250 В · А при коэффициенте мощности 0,4.
Принцип заряда конденсатора до определенного уровня использован также в реле типа РО-01. Эти реле имеют диапазоны выдержек времени 0,1-1 с; 0,3-3 с; 0,1-10 с и 0,3-30 с. Выдержки времени регулируются ступенчато с помощью двух переключателей: один - через 10% и другой - через 1% максимальной уставки по шкале реле. Управление работой реле осуществляется подачей напряжения питания. Реле РВ-01 выпускаются для работы на постоянном оперативном токе напряжением 48, 60, 110, 220 В и переменном - 100, 127, 220 и 380 В. Реле имеют два переключающих контакта, которые срабатывают с одинаковой выдержкой времени. Время возврата реле - не более 0,06 с на постоянном токе и 0,075 с на переменном, время подготовки к повторной - не более 0,1 с на постоянном и переменном токе.
Выпускаются также полупроводниковые реле времени РВ-03. Эти реле осуществляют регулируемую выдержку времени после снятия с них напряжения питания (аналогично электромеханическим реле времени серии ЕВ-200). Реле РВ-03 имеют один контакт, переключается без выдержки времени, и два контакта с независимо регулируемой выдержкой на их замыкания. Выдержки времени регулируются ступенчато в пределах от 0,15 до 20 с.
Рисунок 21.11. Кинематическая схема программного реле ВР-10: 1 - электродвигатель, 2 - редуктор, 3 - сцепление, 4 - электромагнит, 5 - возвратная пружина, 6 - тормоз, 7 - шестеренками, 8 - упор, 9 - диски со шкалой, 10 - втулка , 11 - зажимная гайка, 12 - шестерня, 13 - шестеренками, 14 - диск сцепления, 15 - пружина
Программные реле времени Е-52 и ВР-10 (рисунок 21.11) представляют собой электромеханическое устройство с приводом от синхронного электродвигателя 1. Вращение двигателя передается кинематической узлу, состоящий из редуктора 2 и системы шестерен. Шестеренками 13 вращает с помощью шестерни 12 одновременно все диски 9 шкале. Через установленные интервалы времени упор 8 шкалы переключает электрические контакты реле. В зависимости от модификации реле может иметь от трех до шести барабанов выдержек времени и такое же число независимых контактных групп.
Установка времени срабатывания контактных групп производится перемещением барабанов выдержки времени при отпущенном положении зажимной гайки 11. При отключении напряжения с электродвигателя диски 9 под действием возвратной пружины 15 возвращаются в исходное положение.
21.5. Правила эксплуатации
В процессе эксплуатации аппаратуры необходимо обращать внимание на любые, даже небольшие изменения во внешнем состоянии эксплуатируемых средств, чтобы предотвратить более серьезным поломкам. Профилактические осмотры и обычное наблюдение за работой аппаратуры дают возможность вовремя выявить возникающие повреждения и принять меры к их устранению.
В результате осмотра выявляют элементы, вышедшие из строя, а также элементы с явными признаками наступающих отказов. При осмотрах убеждаются в целостности и наличии всех необходимых деталей, надежности крепления, исправности гибких соединений. Прежде всего осматривают катушки электромагнитных реле, а также микроэлектродвигателей и электромагнитов, работающих в составе командоаппаратов и реле времени. Обуглившаяся или потемнела лакотканева изоляция катушек свидетельствует о неисправности соответствующих элементов.
Особенно внимательно осматривают контакты как наиболее уязвимые места в аппаратуре. Если катушки, элементы крепления и возвратные пружины выдерживают до 20 млн. Включений за весь срок службы, то контакты - всего лишь 1 млн. Проявляют элементы с оплавленными, выкрошившихся или окисленными контактами, с увеличенными зазорами между ними или с поврежденными проводами. Выясняют причины наступивших или возможных отказов и, если это не сопряжено с серьезными реконструктивными работами, сразу же устраняют.
Преждевременный выход из строя контактных элементов возможен в результате уменьшения контактного давления (вследствие ослабления пружин и перегрева контактов, их подгорания или оплавления). Уменьшение межконтактного зазоров также недопустимо. Контактное давление конечно регулируют сгибая пружины. О величине давления судят по контактному провале. В процессе регулирования давления следят за межконтактного зазорами. Уменьшение зазоров в условиях вибрации может привести к ошибочным замыканий электрических цепей.
21.6. Техническое обслуживание
Снимают крышку или кожух аппарата, удаляют пыль и грязь. Копоть, сажу и масляные пятна счищают обтирочный материал, смоченным в бензине. Затем проверяют надежность крепления аппаратов к основанию, уплотнения кожухов, а также надежность заземления и присоединения силовых проводов и проводов цепи управления; подтягивают ослабевшие болты и гайки; зачищают подгоревшие контакты. Контролируют состояние проводов и их изоляции, при необходимости их заменяют или накладывают на них изоляционную ленту.
Проверяют на одновременность замыкания контактов, отсутствие перекосов контактной системы, свободное перемещение и отсутствие заеданий подвижной части магнитной системы. Катушка с обуглившиеся или изоляцией, осыпающейся подлежит замене. Подгоревшие контакты зачищают, ослабевших винты подтягивают. При износе одного из контактов допускается подтягивание контактных пластин с целью одновременного замыкания всех контактов. При замкнутом состоянии магнитной системы не должно быть дребезжания и чрезмерного шума. Следы коррозии мест касания подвижной и неподвижной частей магнитопроводов зачищают шабером. Рычаг возврата теплового реле магнитного пускателя должен легко и свободно передвигаться в пазах и возвращаться в исходное положение под действием пружины.
Кнопки управления должны легко и надежно запирать и размыкать электрические цепи.
21.7. Техника безопасности при работе с реле времени
Профилактическое обслуживание и ремонт систем автоматизации в отношении мер безопасности разделяют на несколько категорий: выполняемые при полном снятии напряжения; выполняемые при частичном снятии напряжения; выполняемые без снятия напряжения.
Подготовка рабочего места при полном или частичном снятии напряжения включает следующие операции. Отключают напряжение. Это делают так, чтобы между токопроводящими частями, отключающие и находятся под напряжением был электрический разрыв. Затем принимают меры, препятствующие обратной его подачи. На всех выключателях и ключах управления, с помощью которых напряжение может быть подано к месту работы, вывешивают предупредительные плакаты: «Не включать, работают люди!» Далее с помощью переносных вольтметров или указателей (индикаторов) напряжения убедиться в отсутствии напряжения на участках будущих ремонтных работ и накладывают на токоведущие части переносное заземление (на случай ошибочной подачи напряжения). В местах, где напряжение не снимают, устанавливают заграждения из щитов или натягивают канат и вывешивают плакаты: «Осторожно! Высокое напряжение! ».
21.8. Устройство и принцип действия
Токовые реле мгновенного действия типа ЭТ-520. Токовые реле мгновенного действия, работа которых основана на электромагнитном принципе, имеют наибольшее применение в системах защит от токов короткого замыкания. На рисунке 1 показано: а - конструктивная схема одной из разновидностей реле типа ЭТ-520, б - условное изображение в схемах (с двумя парами контактов), в - реле при снятом защитном кожухе. Реле состоит из: электромагнита 1, на верхнем и нижнем полюсах которого расположены обмотки, имеющих выходы Н1-К1 и Н 2 К2; зетподибного якоря 3, закрепленного жестко на оси 4, контактной системы, имеет подвижной 7, укрепленный на оси 4, и неподвижные 6 и 6 'контакты; противодействующей пружине 8, одним концом закрепленной оси 4, а другим через поводок к рычагу 9; шкалы 10 с нанесенными значениями токов уставки; упорных винтов 2, ограничивающие ход якоря реле.
На якорь реле действуют два момента - тормозной и вращающий. Тормозной момент создается пружиной 8, и его величина зависит от положения рычага 9 на шкале 10, т.е. натяжения пружины: при повороте рычага влево момент уменьшается, вправо - увеличивается. Вращающий электромагнитный момент, создаваемый током Ир, протекающего через катушки реле, пропорциональный квадрату этого тока,. Крутящий момент, воздействуй на якорь, стремится всегда вернуть и поставить его вдоль оси полюсов.
Рисунок 21.12. Токовые реле мгновенного действия
При нормальном режиме работы защищенного элемента крутящий момент, создаваемый рабочим током, меньше тормозного момента, и якорь находится в крайнем левом положении, а подвижный контакт 7 замыкает неподвижные контакты 6. протекающей по катушках реле ток аварийного режима создает крутящий момент, который больше тормозного момента . В этом случае якорь притягивается к электромагнита, и подвижный контакт 7 замыкает неподвижные контакты 6 ', предварительно разомкнув контакты 6. Ток, при котором срабатывает реле, как указывалось выше, называется его током срабатывания (Испра). За правильностью тока срабатывания необходимо тщательно следить при эксплуатации реле. Срабатывания реле при меньших или больших значениях токов против установки указателя на шкале говорит о его неудовлетворительное механическое состояние (изменение характеристики пружины, неисправность подшипников и т. П.).
Электромагнитные токовые реле изготовляют трех типов: ЭТ-521 - с одним замыкающим контактом, ЭТ-522 - с одним размыкаются контактом и ЭТ-523 - с одним размыкается и одним замыкающими контактами, которые применяются в зависимости от необходимости их в схеми.Регулювання реле на ток срабатывания производится двумя способами: плавно - изменением натяжение пружины и постепенным изменением соединения обмоток 5. При последовательном соединении обмоток относится перемычка на К1-Н2, а зажимами Н1-К2 реле присоединяется к трансформатору тока; при параллельном соединении обмоток перемычки ставятся на Н1-Н2 и К1-К2, а зажимами Н1-К1 или Н2-К2 реле присоединяется к трансформатору тока. Указанные способы соединения обмоток позволяют иметь верхний предел срабатывания реле в четыре раза больше его нижней границы. Например, реле ЭТ-523/20, у которого дробью показан верхний предел тока срабатывания, можно регулировать на токи срабатывания: при последовательном соединении - от 5 до 10 а, а при параллельном - от 10 до 20 а. Собственное время срабатывания реле тока порядка 0,02 - 0,04 сек; потребляемая мощность катушки 0,1 ва на минимальной вставке срабатывания, коэффициент возврата не менее 0.85.
Реле напряжения мгновенного действия типа ЭН-520. Это реле имеет такое же устройство, как и токовая реле типа ЭТ-520. Отличие реле ЭН-520 от реле ЭТ-520 состоит в том, что первое имеет катушки с большим числом витков из проводников малого сечения и подключается к сети или трансформатора напряжения как вольтметр, а у второго катушки с малым числом витков, но большого сечения и оно подключается как амперметр. Реле типа ЭН-520 применяется в основном как реле минимального напряжения, то есть реагирует на уменьшение ниже допустимой нормы или исчезновения напряжения. Напряжение срабатывания реле ЭН-520 регулируется изменением натяжения пружины и переключением обмоток. В обозначениях реле верхний предел напряжения срабатывания указывается дробью. Например, реле ЭН-524/100 может быть установлен на напряжение срабатывания от 25 до 100 в. В зависимости от числа и положения контактов, а также величины напряжения, на которое они реагируют (минимальное, максимальное), реле напряжения выпускаются различных исполнений, аналогичных реле ЭТ-520.
21.9. Основные технические характеристики
Рассмотрим зависимость выходного параметра от значения влияющей величины для реле с замыкающим контактом. В этих реле при отсутствии входного сигнала контакты исполнительного органа разомкнуты и ток в управляемом кругу равен нулю. Для бесконтактных реле сопротивление, введен в управляемое круг, не ровен бесконечности и ток имеет минимальное значение. Значение влияющей величины, при котором происходит срабатывания реле, называется значением величины срабатывания. К тому времени, когда х <xср, выходной параметр "в" или равен нулю, или уровень всоею минимальному значению уmin (для бесконтактных аппаратов). При х> xср выходной параметрстрибком меняется уmin к ymax. Происходит срабатывания реле. Если после срабатывания уменьшать значение влияющей величины, то при х <xср происходит отпускания реле. Значение влияющей величины, при котором произошло скачкообразное уменьшение выходного параметра с ymax к уmin, называется значением величины отпуска.
Заданное значение величин (срабатывание или отпуска), на которое отрегулировано аппарат, называется установкой по влияющей величиной. Время с момента подачи команды на срабатывание до момента скачкообразного изменения исходной величины, называется временем включения. Это время зависит от конструкции реле и величественные входного параметра. Чем больше значение влияющей величины по сравнению с хср, тем быстрее и надежнее срабатывает реле. Отношение называется коэффициентом запаса. Для целого ряда реле важным параметром является отношение, которое называется коэффициентом возврата.
Время с момента подачи команды на отключение до момента достижения минимального значения выходной величины называется временем отключения. Для контактных аппаратов настоящее время состоит из двух интервалов - времени отпуска и времени дуги. Важным параметром, характеризующим усиливающие свойства реле, является отношение Ру / Рср, где Ру - максимальная мощность в нагрузке управляемого круга, а СССР - минимальная мощность входного сигнала, при котором происходит срабатывание реле. Для реле с исполняющим органом в виде контактной системы максимальная мощность управления Ру определяется не длительным напряжением, которое может пропустить контакт током, можно многократно отключить.
Требования к реле в значительной степени обусловлены их назначением. К реле защиты энергосистем выдвигают следующие четыре основных требования: селективность, быстродействие, чувственность, надежность. Под селективностью понимают способность реле отключать только поврежденный участок энергосистемы. Скорость действия позволяет резко снизить последствия аварии, сохранить устойчивость системы при аварийных режимах, обеспечить высокое качество елетроенергии. Повышенная чувствительность реле позволяет уменьшить "мертвую" незащищенную зону. Реле защиты энергосистем должны иметь высокую надежность, так как неправильная работа реле может привести к развитию тяжелых аварий и недовыпуск большого количества энергии. По внешним условиям реле защиты работают в облегченных условиях. На них не влияют удары, вибрации, они работают в помещениях без пыли и газов, вызывающих коррозию. Если учитывать, что аварийные режимы в системах редкие, реле работают в относительно легких условиях. Поэтому к реле не предъявляются высокие требования по износостойкости.
Реле, предназначенные для схем защиты и автоматики электропривода, должны удовлетворять специфическим требованиям. Эти реле работают при худших условиях: возможные удары, вибрации, современные схемы электропривода имеют число включений в час порядка (1-10) 106 циклов "включение-выключение". поскольку реле управления и защиты электродвигателей приходится выполнять большое количество операций, они должны иметь высокую надежность. Реле бывают контактные и бесконтактные - на магнитных усилителях и на полупроводниковых приборах.
21.10. схемы включения
Схемы внутренних соединений составных частей реле РТ-40 (рисунок 21.13, а) и РН-50 изображены на рисунке 2.
Рисунок 21.13. Схемы внутренних соединений составных частей реле
Данные указаны в паспортах реле должны обеспечивать неравенство, где Ином, р и Ином, дв - номинальные токи реле и двигателя, который защищается. Для двигателей работающих в повторном-кратковременном режиме Ином = Ином, 25, где Ином, 25 - номинальный ток двигателя работающего в повторно-кратковременном режиме при ПВ = 25%. Схема включения КА приведена на рисунке 3.
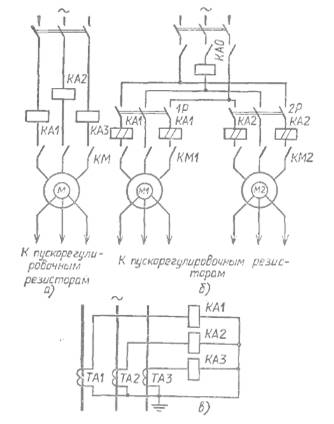
Рисунок 21.14 Схема включения максимально токовых реле
Для того чтобы защитить двигатель при длительном пуска (большая нагрузка на валу) или кратковременной пиковой перегрузки, КА влияет на контактор через реле времени КТ, которое запускается с помощью реле КА4. При нормальном пуске или кратковременной перегрузки, безопасной для двигателя, время пуска или перегрузки меньше времени выдержки tкт контактор КМ в цепи двигателя М не отключается. При этом реле КА4 отпадает и снимает напряжение с реле КТ. Если при пуске или перегрузки, то контакты КТ размыкаются, контактор КМ отключается и двигатель М обесточивается. Такая же схема может использоваться в схемах реверса двигателя.
Рисунок 21.15. Схема максимальной токовой защиты с реле времени
Защита двигателей от снижения напряжения. При КЗ в сети напряжение на двигателях уменьшается, а ток в статоре растет. Если КЗ продолжается 0,03-0,05 с, то, как правило, линейные контакторы и магнитные пускатели не успевают отключить двигатель от сети, а частота его вращения практически не меняется.
При перерыве в подаче электроэнергии более 0,5 с происходит отключение двигателей в неответственных потребителей, причем после восстановления напряжения их повторное включение произойти не должно. Это связано с тем, что одновременный самозапуск большого числа асинхронных двигателей приводит к значительному снижению напряжения, что затрудняет самозапуск двигателей в ответственных потребителей. В ряде случаев неконтролируемый самозапуск двигателей должен быть исключен по условиям технологического процесса.
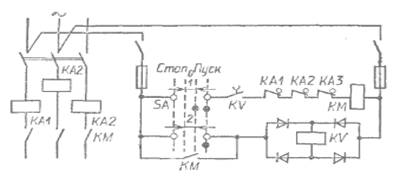
Рисунок 21.16. Схема защиты двигателя при исчезновении напряжения
21.11. Современные перспективные типы реле тока и реле напряжения
Массовый переход на микропроцессорные реле защиты, начался в 70-х годах, был обусловлен стремительным развитием полупроводниковых технологий. Тогда многим на Западе казалось, что эра электромеханических реле закончилась.
Заводы, изготавливали такие реле, срочно переходили на производство полупроводниковых коммутирующих устройств или их просто закрывали. Очнулись все достаточно быстро, и уже через 7 - 10 лет выпуск электромеханических реле был полностью восстановлен. Модернизированные контактные материалы и сплавы, новые пластмассы и лаки позволили резко сократить размеры и повысить надежность электромеханических реле. Сейчас всем хорошо понимают, что полупроводниковые коммутирующих устройств могут занять лишь определенную нишу, но не способны полностью заменить электромеханические коммутирующих устройств.
Конечно, недостатки и справедливые нарекания на конкретные типы реле (очень ограниченной номенклатуры!) Чисто психологически распространяются на весь класс электромеханических реле. Стремление избавиться постоянного обслуживания изношенных электромеханических реле является важным стимулом в релейщик при переходе на многообещающие микропроцессорные устройства. Однако многие специалисты не знают, что расходы на обслуживание старых реле могут быть ничуть не больше от затрат на приобретение дорогих электронных блоков, вышедших из строя и не подлежат ремонту.
Информационный фон, целенаправленно создаваемое компаниями-производителями, дает не совсем точное представление о микропроцессорные реле защиты как об устройствах, обладающих только преимуществами и не имеют недостатков. Слабые места микропроцессорных реле, к сожалению, не обсуждаются даже на страницах специализированных научно-технических журналов.
Массовый переход на микропроцессорные устройства обусловлен не принципиальной неспособностью электромеханических реле обеспечить эффективную защиту энергетических объектов от аварийных режимов и не их недостаточной надежностью, а стремлением крупнейших компаний мира получить сверхприбыль от производства модных реле.
Отдавая предпочтение микропроцессорной релейной защиты, следует ориентироваться не только на рекламные проспекты крупных электротехнических компаний, но и по мнению независимых специалистов. Однако в любом случае такой переход должен быть взвешенным и очень осторожным, особенно в отношении реле, изготовленных малоизвестными фирмами.
Нужно иметь в виду, что функциональные блоки, то есть печатные платы современных реле, выполненные, как правило, на микроэлементах по технологии поверхностного монтажа и является неремонтопригодных. Поэтому заранее стоит обсудить порядок замены плат, вышедших из строя, и их стоимость.
При выборе микропроцессорных устройств того или иного типа для массовой закупки нельзя относиться к нему, как к «черного ящика» с параметрами и характеристиками, указанными компанией-производителем. Необходимо обязательно раскрыть вроде реле и внимательно осмотреть его внутреннюю конструкцию. При этом должна быть учтена элементная база, на которой построены входные и выходные цепи, в частности, входные и выходные клеммы, которые по требованиям стандартов должны выдерживать высокую испытательное напряжение. Кроме того, стоит обратить внимание на наличие и правильный выбор элементов для защиты от перенапряжений входных цепей, соответствие параметров выходных реле требованиям коммутации индуктивной нагрузки в цепи постоянного тока с напряжением 220 В (управление катушкой высоковольтного выключателя) и др. В интернете можно найти технические параметры практически любого электронного компонента и электромагнитных реле, поэтому такая проверка не вызовет большого труда.
Для обеспечения высокой надежности работы микропроцессорных реле необходимо принять специальные меры по обеспечению их бесперебойного питания и защиты сетей питания от перенапряжений и высокочастотных помех. Хорошими помощниками в этом станут специальные фильтры для цепей питания и мощных варисторов, совмещенные с предохранителями и сигнальными элементами. На провода, соединяющие реле, трансформаторы тока и напряжения, должны быть насажены специальные ферритовые кольца, повышают сопротивление для высокочастотных сигналов. Все эти элементы сейчас широко представлены на рынке. Особое внимание следует уделить повышению качества кругов заземления. Лучше отделить контуры заземления микропроцессорных реле и других высокочувствительных электронных систем от контура заземления силового оборудования станций и подстанций.
Учитывая то, что современные микропроцессорные реле защиты многофункциональные и напоминают мини-ЭВМ, надо заранее позаботиться о приобретении «энного» количества портативных компьютеров (ноутбуков) и взять в штат высококвалифицированных специалистов, которым можно было бы доверить работу с такими реле.
Системные администраторы должны принять серьезные меры для защиты локальных компьютерных сетей с подключенными микропроцессорными реле от несанкционированного доступа, в том числе и из интернета.
Таким образом, очевидно, что даже в век высоких технологий безопасность микропроцессорных реле потребует не меньше затрат, чем ремонт электромеханических реле. Итак, модное увлечение микропроцессорным релейной защитой не так уж идеально, как это может быть следствием рекламных проспектов.
21.12. Тепловые реле: назначение, строение, принцип действия, пределы регулирования срабатывания (на самостоятельную проработку)
21.12.1. Тепловые защитные устройства
Тепловые реле применяются для защиты электродвигателей от перегрузок недопустимой продолжительности, а также от обрыва одной из фаз.
Выбор реле производится с кривыми срабатывания, с учетом холодного и теплого старта электродвигателя. Характерным параметром выбора является перегрузочная способность электродвигателя: Kp = Ia / In, где Ia - пусковой ток; С - номинальный ток; минимальное время пуска t и In, указанные в паспортных данных электродвигателя. Кривая срабатывания при холодном пуске должна проходить ниже точки с этими координатами. Правильно подобранные тепловые реле защищают АД не только от перегрузки, но и от заклинивания ротора, перекоса фаз и от затянутого пуска.
Недостатком тепловых реле является то, что трудно подобрать из имеющихся реле такие, чтобы ток теплового элемента отвечал тока электродвигателя. Кроме того, сами реле требуют защиты от короткого замыкания, поэтому в схемах должны быть предусмотрены предохранители или автоматы. Тепловые реле не способны защитить двигатель от режима холостого хода или недогрузка, причем даже при обрыве одной из фаз. Поскольку тепловые процессы, происходящие в биметаллические, имеют достаточно инерционный характер, реле плохо защищает от перегрузки, связанного с быстросменным нагрузкой на валу электродвигателя.
Если нагрев обмоток обусловлено неисправностью вентилятора, загрязнением поверхности двигателя, тепловое реле тоже окажется несостоятельным, так как потребляемый ток не растет или растет незначительно. В таких случаях, только встроенный тепловой защите способен выявить опасное повышение температуры и вовремя выключить двигатель.
Контрольные вопросы:
1. Для чего предназначены аппараты электрической защиты?
2. Как осуществляется включение автомата?
3. Элемент и каким образом обеспечивает задержку во времени в электромагнитном реле времени?
4. Какие функции выполняет и как работает предохранитель плавкий?
5. Каково назначение и принцип действия реле теплового?
6. Назовите недостатки теплового реле.
Тема 22. Схемы электрической защиты и блокування
22.1. нулевую защиту
22.2. тепловая защита
22.3. Минимально токовая защита
22.1 Нулевая защита
Нулевую защиту двигателя от непроизвольных включений двигателя после снижения или снятия напряжения в сети осуществляется установкой реле минимального напряжения РН.
Магнитный пускатель осуществляет нулевую защиту двигателя после его остановки по причине хотя бы кратковременного значительного снижения или полного исчезновения напряжения сети, исключая возможность самопроизвольного пуска двигателя (так называемый самозапуск) после восстановления напряжения.
В схеме предусмотрен также нулевую защиту двигателя с помощью реле напряжения 1РН и 2РН, включенных через трансформаторы напряжения. При пуске двигателя нормально закрытые контакты 1РН и 2РН разомкнуты. При снижении напряжения контакты 1РН или 2РН замыкаются, шунтируя катушку реле времени IP В, которая при этом теряет питание и отключает пусковые контакторы КРЛ или КРУ с помощью нормально открытого контакта 1РВ, размыкает с выдержкой времени. Защитные панели предназначены для максимальной и нулевой защиты двигателей и применяемых при кулачковых и магнитных контроллерах. Панель расположена в металлическом шкафу, в котором на изоляционной асбоцементной плите вмонтированы трехпо-люсний рубильник с внешней рукояткой и линейный контактор. Панель также снабжена максимальным реле, действующими на линейный контактор, предохранителями цепей управления, переключателем испытания цепей и пусковой кнопкой. Панель закрывается на замок, обеспечен блокирующим устройством.
Во время недопустимого перегрузки срабатывает максимальную защиту и разрывает цепь реле напряжения РН, отключая тем самым оперативную цепь от источника тока, так как контакт Ki командоконтроллера при работе двигателя разомкнут. Таким путем осуществляется нулевую защиту двигателя.
22. 2. Тепловая защита
Эта защита отключает двигатель от источника питания, если в результате протекания по его цепях повышенных токов имеет место более высокий нагрев его обмоток. Такая перегрузка возникает, например, при обрыве одной из фаз трехфазного АД или СД.
Тепловая защита двигателей может быть осуществлена с помощью тепловых, максимально-токовых реле и автоматических выключателей.
Тепловые реле FР включаются в две фазы трехфазных двигателей непосредственно или через трансформаторы тока И, если ток двигателя превышает номинальный ток реле. Для защиты ДПТ реле включаются в один или два полюса цепи их вопросы. Размыкающие контакты тепловых реле включаются или в цепи катушек главных (линейных) контакторов, или в цепь защитного реле, как показано на рисунке. Действие теплового реле основано на зффект сгибание биметаллической пластинки при ее нагревании за счет различных температурных коэффициентов линейного расширения образующих ее металлов.
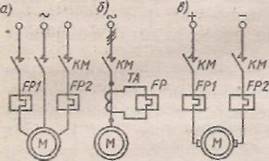
Рисунок 22.1. Тепловые реле.
Номинальный ток теплового элемента реле ИТ, Е выбирают равным или немного больше номинального тока двигателя Ином
В ЭП применяются злектротепловие двухполюсные реле типа ТРН на номинальные токи от 0,32 до 40 А, однополюсные ТРТП на токи от 1,75 до 550 А, трехполюсные РТЛ на токи от 0,17 до 200 А. Они допускают регулировку границ уставки тепловой защиты ; при токе 1,2 Ином время их срабатывания составляет 20 мин.
Тепловая защита двигателей может осуществляться автоматическими выключателями и магнитными пускателями, если они имеют встроенные тепловые расцепители, как, например, в схеме автомата.
При повторно-кратковременных режимах работы ЭП, когда процессы нагрева реле и двигателя разные, защита двигателей от перегрузок осуществляется с помощью максимально-токовых реле FА1 и FА2. Токи уставок реле при этом выбираются на 20-30% выше номинального тока двигателя. Так как ток уставки реле ниже пускового тока, то при пуске его контакты шунтирует контактами реле времени, имеет выдержку времени, немного большую времени пуска двигателя.
22.3. Минимально токовая защита.
Этот вид защиты применяется в ЭП с ДПТ и СД для защиты от обрыва их цепей возбуждения. Исчезновение тока возбуждения опасно тем, что оно вызывает исчезновение противо-ЭДС двигателей и приводит тем самым к значительному росту тока в их силовых цепях и резкого снижения развиваемой ими момента.
Эта защита осуществляется с помощью минимально токового реле
КF, катушка которого включается в цепь обмотки возбуждения двигателя, как это показано на рисунке. Замыкающий контакт реле КF включается в цепь катушки контактора КМ, что позволяет включать двигатель только при наличии тока возбуждения в ОВМ. При работе ЭП в случае исчезновения или резкого снижения тока возбуждения контакт реле КF разомкнется и контактор КМ, потеряв питания, отключите двигатель от сети.
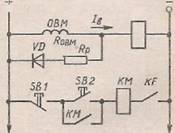
Рисунок 22.2. минимально токовое реле
В качестве реле минимального тока в ЗП используется реле типа СЭВ 830.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Для чего предназначены защитные панели?
2. Когда срабатывает максимальная защита?
3.
Как осуществляется тепловая защита
двигателей?
Содержательный модуль 8: автоматическое
управление станками с ПУ И РТК
Тема 23. Автоматическое управление в функции пути
23.1. Концевые выключатели, назначение, строение, принцип действия.
23.2 Автоматическое управление в функции пути
23.3. Бесконтактное управление, бесконтактные логические элементы схемы включения (на самостоятельную проработку)
23.3.1 бесконтактное управление
23.3.2 Недостатки бесконтактного выключателя
23.3.3 Функции выключателя конечного бесконтактного
23.1. Концевые выключатели, назначение, строение, принцип действия.
Конечные выключатели -это электрические аппараты защиты, ограничивающих перемещение подвижных частей электропривода рабочих машин, а при достижении последним предельных положений вызывают торможение, блокировка, включение звуковой или световой сигнализации и др.
На рис. показано конечный
выключатель типа ВПК2. В исходном состоянии шток 1 и подвижные контакты 2
находятся в левом крайнем положении. Левый подвижный контакт при этом замкнутый
с неподвижными контактами 3, а правый остается разомкнутым. Под действием
подвижной части привода, при достижении им некоторого предельного положения,
шток вместе с подвижными контактами перемещается вправо и тем самым
осуществляет размыкание левой и замыкания правой контактных групп.
Рисунок 23.1 Концевой выключатель типа ВПК 2 (крышка снять): 1 - штук, 2 - подвижные контакты, 3 - неподвижные контакты
Концевые выключатели предназначены для работы в електричриих цепях переменного тока напряжением до 500 В и в цепях постоянного тока напряжением до 440 В, а их контакты рассчитаны на токи до 15 А.
Условные графические обозначения конечных выключателей на электрических схемах показаны в п. 43 приложения А.
23.2. Автоматическое управление в функции пути
Автоматическое управление в функции пути является одной из наиболее распространенные форм электрической автоматизации металлорежущих станков. Основным элементом управления в схемах дорожной электроавтоматики является путевой переключатель. Дорожным переключателем называют аппарат, замыкающий или размыкает цепи управления, когда подвижной элемент машины достигает определенной точки пути. Если путевые выключатели установлены на концах пути, то их называют конечными выключателями. Это название часто распространяют на все пути пермикачи независимо от места их установки.
Путевой выключатели срабатывает при нажатии на шток стального упора, установленного на элементе машины с постепенным или вращательным движением. На штоке закреплены контакты, которые при его перемещении открываются или закрываются. После ухода упора пружина возвращает контактную систему в исходное положение (переключатель с самовозвратом).
Переключатели могут быть мгновенной и не мгновенно действия. В переключателей не мгновенно действия скорость замыкания и размыкания контактов зависит от скорости движения упора, нажав на шток. При медленном движении упора различия контактов также является медленным, в результате чего возникает долговременная электрическая дуга, разрушает контактные поверхности. Поэтому такие переключатели не используют при малых скоростях движения упора (менее 0,6 м / с), а используют путевые переключатели мгновенного действия. Они обеспечивают высокую скорость переключения контактов при любой скорости движения упора.
Конструкция быстродействующего переключателя может быть такой, как показано на рис.
Кроме дорожных переключателей в машиностроении широко используют так называемые микропереключатели. В микропереключателя при нажатии штока на конец пружины особой конструкции с силой выше некоторой величины подвижный контакт скачком переходит из одного положения в другое. Микропереключатели имеют малые габариты и малое рабочее перемещение штока, потребует малой силы нажатия. Для вращательного движения какого-либо узла станка схема установки дорожного переключателя и кулачка, действующего на переключатель, изображена на рис.
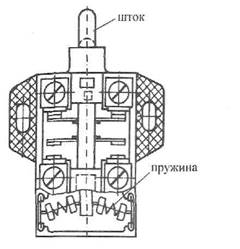
Рисунок 23.2. Конструкция переключателя мгновенного действия
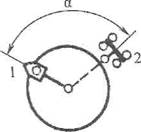
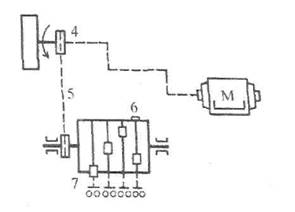
Рисунок 23.3. Управление вращательным движением с помощью дорожных переключателей
Если угол а поворота вала 4 больше 360, вал связывают с барабаном 6 понижающей механической передачей 5. пазах барабана 6 закрепляют кулачки, которые при повороте барабана замкнуть 7 в необходимой последовательности. Такое устройство называют дорожным командоаппаратом. Его используют тогда, когда нежелательно размещать путевые переключатели за ходом узла движется прямолинейно. Например, когда нормальная эксплуатация дорожных переключателей затруднена из-за попадания охлаждающей жидкости, стружки, масла. Путевой командоаппарат с ускоряющей передачей от вала можно использовать для повышения точности остановки или когда длина прямолинейного перемещения мала. Использование дорожного Командоаппарат способствует также централизации управления.
Путевые переключатели используют также для осуществления заданного цикла перемещений нескольких подвижных узлов одной машины или разных машин. Рассмотрим для примера решения одной такой задачи.
При использовании дорожных переключателей особое значение имеет вопрос о точности остановки подвижных узлов. Точность остановки зависит от: строения дорожного переключателя; степени его износа; состояния его контактов; точности установления кулачка или упора величины перемещений инструмента, обусловленной силами инерции, и ряда других.
Для уменьшения пути движения по инерции необходимо уменьшить скорость движения, маховой момент системы и увеличить тормозной момент.
Основную часть момента инерции составляет момент инерции ротора электродвигателя, поэтому при отключении двигателя ротор его отсоединяют с помощью электромагнитной муфты от остальных кинематической цепи.
Для особо точных перемещений используют два дорожных переключатели. Сначала срабатывает один и переключает электродвигатель на работу с пониженной скоростью, а затем второй переключатель отключает электродвигатель от сети.
Стоит отметить, что относительная сложность точной остановки подвижных частей с помощью дорожной электроавтоматики заставляет во многих случаях использовать гидравлические системы. При этом относительно легко достигают малые скорости и подвижный узел может длительное время оставаться прижатым к жесткому упору.
23.3. Бесконтактное управление, бесконтактные логические элементы схемы включения (на самостоятельную проработку)
23.3.1 Бесконтактное управление
Изобретение относится к области электротехники и может быть использовано во взрывобезопасных средах. Техническим результатом является расширение области применения путем использования в цепях постоянного тока напряжением до 220 В, увеличение точности позиционирования. Выключатель конечный бесконтактный состоит из печатной платы, на которой расположена схема с двумя магнитоуправляемых микросхемами и с двумя электронными ключами на полевых транзисторах, образующие два идентичных управляющих канала, работающих независимо друг от друга. В качестве магнитоуправляемых микросхем использованы микросхемы с малой петлей гистерезиса. Печатная плата расположена во взрывоопасном корпусе, подвижный элемент с постоянными магнитами - вне корпуса. Два управляющих канала расположены так, что срабатывают в крайних положениях постоянных магнитов. 2 ил.
Известный контактный датчик перемещения, содержащий постоянный магнит, закрепленный с возможностью перемещения, в котором сигнализация перемещение осуществляется с помощью переключающих размыкающих и замыкающих механических контактов.
23.3.2 Недостатки бесконтактного выключателя
Недостатком данной конструкции является низкая надежность, поскольку в эконом происходит механическое переключение контактов, при этом может происходить «замыкание» и «звон» контактов, уменьшает количество циклов перемещения, большая величина гистерезиса около 20 мТл, ухудшает точность позиционирования.
Наиболее близким к изобретению техническим решением, выбранным в качестве прототипа, является переключатель бесконтактный, содержащий магнитоуправляемых микросхему, подвижную систему, постоянный магнит, закрепленный на подвижной системе, концентратор магнитного поля, корпус.
Недостатками известного выключателя бесконтактного является то, что выключатель может работать только в цепях с низким напряжением, не обладает необходимой точностью позиционирования и не имеет возможности передачи и автоматического отключения управляющего сигнала.
Технический результат, достигаемый изобретением - расширение области применения, путем использования во взрывобезопасных средах и в цепях постоянного тока c напряжением до 220В, передача и автоматическое отключение управляющего сигнала, при достижении исполнительным органом крайнего положения, увеличение надежности и точности позиционирования.
Технический результат достигается тем, что выключатель концевой бесконтактный содержит взрывобезопасный корпус, расположенную в нем печатную плату с двумя магнитоуправляемых микросхемами и двумя электронными ключами на полевых транзисторах, расположенных и соединенных между собой с образованием двух идентичных управляющих каналов, работающих независимо друг от друга , подвижная система с постоянными магнитами расположена вне взрывобезопасного корпуса, магнитоуправляемых микросхемы расположены таким образом, что они срабатывают в крайних положениях подвижных постоянных магнитов. Конструкция выключателя конечного бесконтактного поясняется чертежами:
Выключатель конечный бесконтактный содержит печатную плату 1. На печатной плате 1 расположены две магнитоуправляемых микросхемы 2, 3 и два электронных ключа 4, 5 на полевых транзисторах. Магнитоуправляемых микросхема 2 и электронный ключ 4 на полевых транзисторах и соответственно магнитоуправляемых микросхема 3 и электронный ключ 5 на полевых транзисторах соединены между собой с образованием двух идентичных управляющих каналов, работающих независимо друг от друга. В качестве магнитоуправляемых микросхем 2, 3 использованы магнитоуправляемых микросхемы с малой петлей гистерезиса 1-2 мТл, например магнитоуправляемых микросхемы серии К1116КП. На противоположной стороне печатной платы 1 расположены концентраторы магнитного поля 6 и 7, которые крепятся на магнитоуправляемых микросхемах 2 и 3, которые значительно повышают их магниточувствительных.
Плата 1, с двумя идентичными управляющими каналами, работающими независимо друг от друга, расположена внутри взрывозащищенного корпуса 8 таким образом, что магнитоуправляемых микросхемы 2 и 3 размещены в непосредственной близости к стенке корпуса 8 и параллельно ей.
Магнитоуправляемых микросхемы 2 и 3 взаимодействуют с полями постоянных магнитов 9 и 10, образующие с соответствующими концентраторами 6 и 7 магнитного поля магнитную систему. Постоянные магниты 9 и 10 размещены вне корпуса 8 на подвижной системе 11, выполненной, например, в виде рычагов, которые в свою очередь закреплены на валу 12 исполнительного механизма. Конструкция подвижной системы 11 позволяет производить регулировку момента срабатывания выключателя конечного бесконтактного установкой рычагов на необходимый угол и перпендикулярным перемещением постоянных магнитов 9,10 по магнитоуправляемых микросхем 2, 3.
23.3.3 Функции выключателя конечного бесконтактного
Функции выключателя конечного бесконтактного заключаются в том, что в любом их двух крайних положений исполнительного механизма переключателя конечного бесконтактного поступает информация об этом положении.
С пульта диспетчера на выключатель концевой бесконтактный поступает управляющий сигнал, включая один из управляющих каналов, запускает исполнительный механизм, от которого приводной вал 12 приходит в движение и перемещает рычаги 11 с постоянными магнитами 9 и 10. При подходе постоянного магнита 10 до магнитоуправляемой микросхеме 3 на расстояние 1 мм от центра, магнитоуправляемых микросхема 3 срабатывает и "размыкает" из магнитоуправляемых микросхему 3 контакта электронного ключа 5, подача управляющего сигнала прекращается, а на пульте диспетчера загорается сигнальная лампа (светодиод) сообщает, что команда выполнена.
Так как выключатель концевой бесконтактный включает два управляющих идентичных канала с двумя рычагами, то второй канал аналогично срабатывает при подаче управляющего сигнала на противоположное перемещения.
Контрольные вопросы:
1. Чем отличаются микропереключатели и концевые выключатели?
2. Как осуществляют автоматическое управление в функции пути?
3. Что используют для особо точных перемещений?
4. Где используется бесконтактное управление
5. Назовите недостатки бесконтактного управления.
6. В чем заключаются функции бесконтактного управления?
Тема 24 Автоматическое управление в функции времени
24.1. Моторное реле времени
24.2. Реле времени с электромагнитным приводом
24.3. Электронные (полупроводниковый) реле времени
24.4. Автоматическое управление в функции времени
24.1. Моторное реле времени.
Для получения больших выдержек времени (десятки минут и часы) используют электродвигательную (моторные) реле времени. Моторные реле времени в своей основе имеет специальный низкоскоростной двигатель и редуктор с большим передаточным числом, на валу редуктора. Механизм реле времени, рисунок 1.22 состоит из редуктора 1, диска времени 2, имеющий несколько зубцов, контактов 3, включенных в цепь катушек электромагнитов или пускателей производственной машины и катушки 4 паузного механизма 5. Диск времени, вращаясь с заданной скоростью, своими зубцами замыкает контактную группу 3 и включает электродвигатель производственного механизма или другие технологические установки. С помощью конечного выключателя размыкается цепь механизма 5. механизм реле приводится в действие синхронным двигателем. Выдержка времени создается вследствие замедления, получаемого в редукторе двигателя и дополнительного редуктора, установленного в реле.
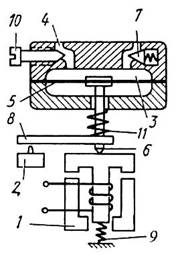
Рисунок 24.1. Пневматическое реле времени с электромагнитом
По такому принципу работает реле времени РВД-1200 с пределами регулирования 1 - 20 мин, погрешностью выдержки времени ± 0,5 сек. Оно имеет пять независимых по времени цепей срабатывания. Подобные реле чаще всего применяют для нанесения программы автоматического управления каким-либо процессом, поэтому их часто называют также программными.
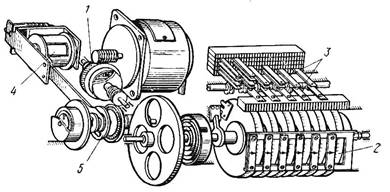
Рисунок 24.2. Моторное реле времени
На рисунке приведена схема моторного реле времени РВД-1200. при замыкании ключа К синхронный двигатель с редуктором начинает вращаться. Одновременно нарушается электромагнит ЭМ и сцепляет зубчатые колеса Z1и Z2. На одной оси с колесом Z1 закреплены профильные шайбы (кулачки), одна из которых показана на рисунке. Двигатель начинает вращать профильные шайбы в направлении стрелки, натягивая при этом пружину F2.Как только уступ выреза профильной шайбы S подойдет к выступлению рычага С, рычаг под действием пружины F3 вернется, размыкая контакты 1 - 2 в цепи двигателя СД и замыкая контакты 3 - 4 выходной цепи реле. Другие профильные шайбы на оси колеса Z1 должны быть установлены на меньшие независимые выдержки времени и запирать (или размыкать) каждая свои, также не показаны на схеме контакты внешних цепей.

Рисунок 24.3. Принципиальная схема моторного реле времени
При размыкании контактов 1 - 2 двигатель СД останавливается, а все профильные шайбы остаются в том положении, которого они достигли до тех пор, пока ключ SA замкнут. При размыкании SA Сцепляющий электромагнит ЭМ отпустит якорь, и пружина F1 расцепить колеса Z1 и Z2. Профильные шайбы под действием пружины F2 вернутся назад до упора А. При этом контакты окажутся снова в исходном положении, и реле времени готово к новому включению. Положение шайб на оси колеса Z1 определяет время замедления срабатывания контакта. Оно (установка времени) может быть установлено с помощью шкалы, градуированной в минутах и секундах.
24.2. Реле времени с электромагнитным приводом
Реле времени с электромагнитным приводом типа ЭВ-100 на постоянном токе показано на рисунке. По имеющейся в реле шкале может задаваться выдержка времени замыкающих и проскальзывают контактов. Реле этого типа могут создавать выдержки времени от 0,1 до 20 сек, и имеют три разновидности исполнения контактов.
При подаче напряжения на обмотку 7 электромагнита цилиндрический плунжер 6 втягивается, сжимая возвратную пружину, при этом освобождается рычаг 5 сцепление с часовым механизмом. Часовой механизм 4 под действием встроенной в нем пружины 1 начинает вращаться, обеспечивая равномерное движение стрелки с подвижным контактом 3, который через заданный промежуток времени вызывает замыкание неподвижных контактов 2, закрепленных на контактной колодке. Выдержка времени задается поворотом контактной колодки 2 против соответствующей цифры на шкале.
Выпускают также аналогичные реле на переменном токе типа ЭВ-200.
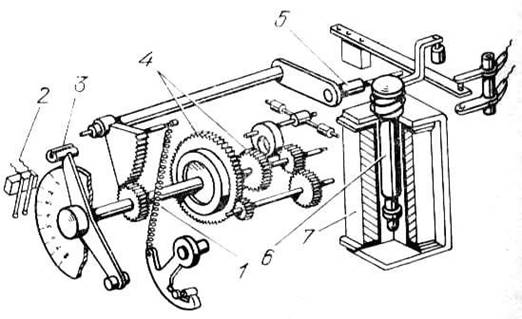
Рисунок 24.4. Реле времени ЭВ-100
24.3. Электронные (полупроводниковый) реле времени
Электронные (полупроводниковый) реле времени (ЭРВ), обычно в своих схемах используют различные полупроводниковые элементы (чаще транзисторные) и конденсаторы, время разряда или заряда и определяет выдержку времени, рисунок 24.4
В исходном положении внешний управляющий контакт. К замкнут и на базу транзистора VT1 подано отрицательный потенциал источника питания GB. Транзистор открыт, при этом потенциал базы транзистора VT2 будет положительным по отношению к его эмиттера и будет закрыт. В результате выходное реле KV будет отключено. В исходном положении конденсатор С будет заряжен с показанной на рисунке полярностью своих обкладок.
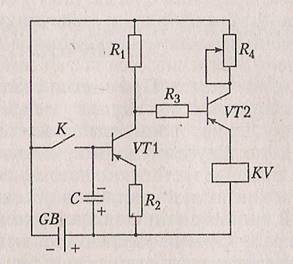
Рисунок 24.4. Схема устройства электронного реле времени
Команда на начало отсчета времени подается при размыкании внешнего управляющего контакта К. после этого начинается разряд конденсатора С через резистор R2 и переход эмиттер - база транзистора VT1. В конце разряда транзистор VT1 закроется, что приведет к появлению на базе транзистора VT2 отрицательного потенциала. Оно откроется, по обмотке реле KV начнет протекать ток, оно сработает и переключит свои контакты. Отсчет времени закончится.
Выдержка времени такого реле определяется временем разряда конденсатора С, которое зависит от величины его емкости и сопротивления резистора R2. Регулируя эти величины, можно устанавливать необходимые выдержки времени реле. Выпускаются электронные реле времени обеспечивают выдержку времени от 0,1 с до 10 мин.
24.4. Автоматическое управление в функции времени
Во время работы производственного механизма часто требуется пауза между двумя последовательными перемещениями. Например, при работе токарного станка нужно иногда остановить суппорт в конце хода и задержать его в этом положении для обеспечения операции зачистки. В данном случае, кроме дорожных переключателей нужно использовать реле времени, которое через установленное время после подачи командного импульса замыкает или размыкает те или иные цепи управления.
Пусть, например, подвижном узлу необходимо обеспечить перемещение с точки 1 в точку 2, остановку в точке 2 в течение определенного времени и возврата в точку 1. Схема управления приводом такого перемещения изображена на рис. 13.26.
При нажатии кнопки 8В19 включается контактор КМ1, который включает двигатель. Подвижный узел А начинает перемещаться к точке 2, в которой упор 4 нажимает на путевой переключатель 8 () 2. Размыкающий контакт этого переключателя разрывает круг катушки КМ1, электродвигатель останавливается и перемещение прекращается. Замыкающий контакт переключателя 8 () 2 включает круг катушки реле времени КТ. Пока механо реле времени работает, узел находится в точке 2. По истечении времени выдержки замыкается контакт реле КТ и включается контактор КМ2.
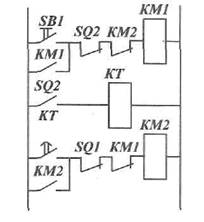
Рисунок 24.5. Схема управления для обеспечения паузы в конце перемещения
Двигатель вращается в противоположную сторону и узел А возвращается в начальную точку 1. Размыкающий контакт переключателя SQ1 снимает питания контактора КМ2 и движение прекращается. Контакт КТ необходимо шунтировать контактом КМ2, так как при уходе узла от точки 2 замыкающий контакт SQ2 размыкается и реле времени выключается.
Наряду с автоматизацией технологических процессов реле времени широко используют для автоматизации процесса пуска или торможения мощных электродвигателей.
В схеме управления динамическим торможением асинхронного двигателя до нажатия на кнопку 8В1 реле времени КТ включено и его размыкающий контакт в цепи катушки тормозного контактора КМ2 разомкнут.
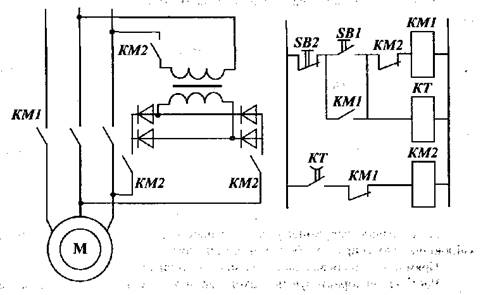
Рисунок 24.6. Схема управления динамическим торможением асинхронного двигателя
После нажатия на кнопку 8В контактор КМИ своими контактами включает двигатель в сеть питания. Одновременно включается реле времени КТ и замыкает контакт КТУ цепи катушки КМ2. Размыкающий контакт КМИ открытый и поэтому не происходит включения контактора КМ2. Если нажать кнопку 8В2, катушка контактора КМИ теряет питания, контакт КМИ замыкает круг катушки КМ2 и размыкаются силовые контакты КМИ (двигатель отсоединяется от сети). При этом замыкаются контакты КМ2, статор двигателя получает питание от постоянного напряжения выпрямителя и возникает динамическое торможение. Реле КТ выключается одновременно с контактором КМИ и через заданную выдержку времени отключает контактор КМ2.
В машиностроении, кроме электромагнитных реле времени, значительное распространение получили пневматические и двигательные реле времени.
Пневматические реле времени обеспечивают выдержку времени от 0,4с до 2 мин. При включении управляющими контактами электромагнита начинает опускаться поршень, на поверхности которого закреплена мембрана. Над поверхностью мембраны создается разреженное пространство, которое заполняется через регулируемый отверстие воздухом из окружающей среды. В зависимости от скорости заполнения воздухом разреженного пространства поршень под действием силы тяжести постепенно опускается и при достижении крайнего нижнего положения упор натаскивает на контактную систему микропереключателя. Время выдержки реле начинается с момента включения электромагнита и заканчивается износом контактной системы микропереключателя. При выключения электромагнита все подвижные части под действием пружины занимают исходное положение.
В моторном реле времени при замыкании управляющих контактов включается синхронный двигатель. Вращения вала двигателя через редуктор, муфту и зубчатые колеса передается главной оси реле, на которой закреплены дискообразные шкалы. Закреплены на дисках кулачки перемещаются и через некоторое время замкнуть. Поворотом дисков можно получить размыкания или замыкания контактов в различных кругах через разные промежутки времени. После размыкания управляющих контактов двигатель выключается и закрученная пружина поворачивает ось в прежнее положение. Реле изготавливаются с тремя или шестью дисками. Время выдержки может быть от 2 с до 24 часов.
Если требуется большое число срабатываний в час, то используют разного рода полупроводниковые реле времени.
Контрольные вопросы:
Устройство и принцип работы моторного реле.
Когда начинается разряд конденсатора?
Какую выдержку обеспечивают пневматические реле?
Почему включается синхронный двигатель?
Тема 25. Автоматическое управление в функции скорости и нагрузки
25.1 Реле скорости. Строение принцип действия. Назначение
25.2 Реле давления, электропатрон, гайковерт. Строение. Принцип действия. Назначение
25.3 Адаптивное управление
25.1 Реле скорости. Строение принцип действия. Назначение
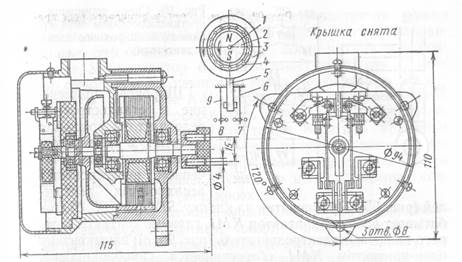
Рисунок 25.1 Индукционное реле скорости
В схемах торможения противотоком асинхронных электродвигателей широко применяют индукционный реле контроля скорости. С валом электродвигателя, угловую скорость которого необходимо контролировать, связывают входной вал реле 5, на котором установлен цилиндрический постоянный магнит 4.
При вращении электродвигателя поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке наводится ЭДС, величина которой пропорциональна угловой скорости вращения вала. Под ее влиянием в обмотке появляется ток и возникает сила взаимодействия, стремится вернуть статор 6 в сторону вращения магнита.
При определенной частоте вращения сила возрастает настолько, что упор 2, преодолевая сопротивление плоской пружины, переключает контакты реле. Реле снабжено двумя контактными узлами: 1 и 7, которые переключаются в зависимости от направления вращения.
Индукционное реле контроля скорости имеет достаточно сложную конструкцию и низкую точность, которая может быть приемлемой только для грубых систем управления. Более высокая точность контроля скорости может быть получена с помощью тахогенератора - измерительной микромашины, напряжение на зажимах которой прямо пропорционально скорости вращения.
Тахогенераторы используют в системах обратной связи регулируемого привода с большим диапазоном изменения скорости, и поэтому погрешность их составляет всего несколько процентов. Наибольшее распространение имеют тахогенераторы постоянного тока.
На рис. показана схема реле контроля скорости электродвигателя М с применением тахогенератора G, в цепь якоря которого включено электромагнитное реле К и регулировочный реостат R. Когда напряжение на зажимах якоря тахогенератора превысит напряжение срабатывания, реле производит переключение во внешней цепи.
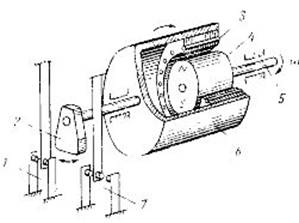
Рисунок 25.2 Индукционное реле скорости
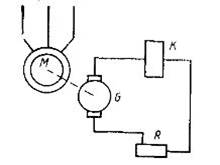
Рисунок 25.3 Реле контроля скорости с тахогенератором
Прямой контроль измерения скорости используют редко.
Чаще используют тахогенератор, электродвижущая сила которого пропорциональна скорости. Якорь тахогенератора жестко присоединяют к валу двигателя. Таким образом, неэлектрических величин (скорость) превращают в электрическую, что позволяет использовать электрические аппараты для управления.
Как командный аппарат в системах автоматического управления в функции скорости используют центробежные или индукционные реле контроля скорости.
Во время пуска двигателя постоянного тока можно обойтись без тахогенератора, потому что электродвижущая сила двигателя, запускается, прямо пропорционально зависит от его скорости.
На рисунке изображена схема автоматического пуска двигателя постоянного тока с параллельным возбуждением в функции скорости (ЭДС).
Катушки двух
контакторов КМ1 и КМ2 подключены к зажимов якоря двигателя. Напряжения на
катушках будут нарастать пропорционально ЭДС якоря. Контакторы налаживают на
срабатывание при определенных (различных) напряжениях, соответствующих
определенным скоростям якоря. Нажатием кнопки SQ1 включают линейный контактор
КМЗ, который подсоединяет якорь двигателя к сети при полностью введенном
пусковом реостате R. С увеличением скорости двигателя увеличивается напряжение
якоря. При определенной скорости (напряжению) срабатывает контактор КМ1 и его контакты замыкают
первую ступень реостата. С дальнейшим увеличением скорости срабатывает
контактор КМ2, что замыкает вторую ![]() ступень реостата.
ступень реостата.
Рисунок 25.4 Схема автоматического реостатного пуска двигателя постоянного тока в функции скорости
25.2 Реле давления, электропатрон, гайковерт.
Реле давления (автоматика включения и выключения насоса) - это "мозг" системы водоснабжения. По стандартной схеме насос управляется командами от реле давления, установленного на трубопроводе. В самом реле настраиваются два параметра: давление включения насоса и давление, при котором насос должен отключиться. Данная схема характерна для индивидуальных скважин и автоматика обычно используется в комплексе с гидроаккумулятором (мембранным баком), предназначенным для поддержания необходимого избыточного давления в сети, компенсации гидравлических ударов и как определенный (небольшой) запас воды. Очень важно провести правильную настройку реле в соответствии с характеристиками насоса и объемом мембранного бака. Чтобы насос не включалось слишком часто, заданный предел давлений должен лежать в средней зоне рабочей характеристики насоса. Значение границ выбирается, как правило, в диапазоне 1,2-2,5 бар с учетом данных о максимально допустимом количестве включений насоса в определенный период времени.
![]()
Рисунок 25.5 Реле скорости
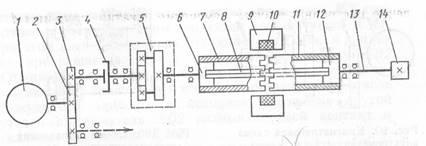
Рисунок 25.6 Кинематическая схема гайковёрта
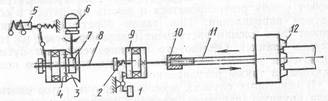
Рисунок 25.7 кинематическая схема электроприёмника
Во многих случаях необходимо контролировать силы и моменты, действующие в тех или иных частях производственного устройства. Это особенно относится к разного рода зажимая устройств (Электроключ, электрические гайковерты, электропатроны т.д.).
Один из простых методов контроля силы основывается на использовании некоторого элемента смещается под действием приложенной силы, сжимает пружину и действует на путевой переключатель.
В зажимая устройствах по мере увеличения силы зажима возрастает момент сопротивления на валу электродвигателя, следовательно и ток, он потребляет. Поэтому контроль силы зажимая устройствах может основываться также на использовании реле тока, катушку которого включают последовательно в цепь тока, потреблял двигатель. Зажима прекращается, если сила тока достигнет величины, которая необходима для срабатывания реле.
На рисунке приведена схема управления электроключ. При нажатии кнопки SB1 включается контактор зажима КМ1 и двигатель начинает вращаться.
Реле максимального тока К8, катушка которого включена в круг потребляемого тока, срабатывает и его размыкающий контакт размыкается. Однако это размыкания никакого действия на схему не вызывает, поскольку в течение короткого времени пуска электродвигателя кнопка 8В1 нажата. Когда пуск закончился, ток электродвигателя уменьшается, реле А5 замыкает свой контакт и контактор КМ1 переходит на самопитание через замыкающий контакт КМ1 и размыкающий контакт КS.
По мере увеличения силы зажима сила тока двигателя увеличивается и, когда сила зажима достигает требуемой величины, реле КS срабатывает и отключает электродвигатель.
![]()
Рисунок 25.8 Схема управления зажимая устройством
При нажатии на кнопку SB2, двигатель переключается на обратное вращение. Отжима происходит до тех пор, пока кнопка SB2 нажата.
Изменение нагрузки гидроприводов сопровождается изменением давления масла. Для контроля нагрузки используют реле давления. При повышении давления масла в трубе прогибается мембрана из маслостойкой резины и поворачивает рычаг, который нажимает на микропереключатель. Такие реле предназначены для работы с давлениями в 5 ÷ 60 атмосфер.
Применение станков с ЧПУ позволяет существенно сократить вспомогательное время, в результате чего себестоимость и производительность обработки на них в большой степени стали зависеть от эффективности процесса резания, параметров процесса резания. Параметры процесса резки (твердость заготовки, припуск, состояние режущего инструмента, технологической системы и т.д.) в процессе обработки меняются, поэтому возникает необходимость поддержания на оптимальном уровне режимов обработки.
Эта задача может быть успешно решена путем применения адаптивных систем (АС), которые позволяют приспосабливаться к изменению условий при обработке с целью получения наилучшего характеристики процесса в целом.
25.3 Адаптивное управление
Адаптивные системы управления предназначены для автоматического изменения в процессе обработки режимов работы и, оптимизируя их, создают возможность изготовления высокоточных изделий из хранением станка и инструмента от таких рабочих перегрузок, которые могут вызвать их поломки или ускоренный износ.
Адаптивные системы управления позволяют автоматически компенсировать такие воздействия, как колебания припусков, твердости, глубины резания, ошибок положения и перемещения, а также автоматически приспосабливаться к оптимальному режиму (выбирать оптимальный режим), обеспечивая предельно управления. Эти системы также позволяют учитывать в о процессе управления упругие деформации, изменение мощности и других параметров. Адаптивные системы, обеспечивающие оптимальное управление, дают возможность в изменяющихся условиях обработки обеспечить экстремальное значение выбранного критерия оптимальности. Эти системы обычно включают управляющую вычислительную машину и сложные логические управляющие блоки
Контрольные вопросы
Охарактеризуйте реле скорости
Какое строение имеет реле скорости?
Принцип действия реле скорости
Реле контроля скорости с тахогенератором
Охарактеризуйте автоматическое управление в функции скорости
6. Что такое реле давления?
7. Охарактеризуйте кинематическую схему электропатроны
8. Охарактеризуйте кинематическую схему гайковерта
9. Какая система управления называется адаптивной?
Тема 26. Электрооборудование автоматических линий (на самостоятельную проработку)
26.1 Электрооборудование автоматических линий
26.2 Схемы управления и контроля основных элементов и устройств линий
26.1 Электрооборудование автоматических линий
Автоматическими называют линии станков, связанных между собой транспортными устройствами. При этом заготовки обрабатываются без непосредственного участия рабочих под наблюдением наладчиков. Такие линии станков проектируют для массового изготовления изделий, устойчивых по конструкции, приспособленных для закрепления заготовок без индивидуальной выверки их положения и удобных для транспортировки.
Число станков в линии определяется технологическим процессом. На каждом станке обрабатываемая заготовка должна быть точно установлена, зафиксирована и закреплена. Эту роль выполняют устройства для фиксации и зажима.
26.2 Схемы управления и контроля основных элементов и устройств линий
![]()
Рисунок 26.1 Схема управления пуском и остановкой линии.
Управление в функции пути строится таким образом, чтобы команда на следующее действие подавалась тогда, когда предыдущая действие уже закончена. Подача команд к началу следующей операции осуществляется с помощью дорожных переключателей или других датчиков пути, а также обработана деталь.
Управление в функции нагрузки используется там, где необходимо контролировать усилия, которые возникают после завершения движения (зажимные устройства). Датчиками усилия являются токовые реле или реле давления.
Управление в функции времени используется когда работа агрегатов происходит без подачи инструмента (закалка, точечная сварка). Датчиками являются реле времени различных конструкций.
Управление в функции скорости используется при электрическом торможении электроприводов. Датчиками являются реле контроля скорости (РКШ).
Управление в функции измерил обрабатываемой детали. Используются устройства активного контроля.
Промежуток времени между подачей двух соседних команд называется тактом линии.
Совокупность тактов, которые необходимы для обработки детали, называется циклом линии.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Что такое автоматическая линия?
2. Охарактеризуйте схему управления пуском и остановкой линии.
3. Что такое цикл линии?
4. Что такое такт линии?
Скачано с www.znanio.ru
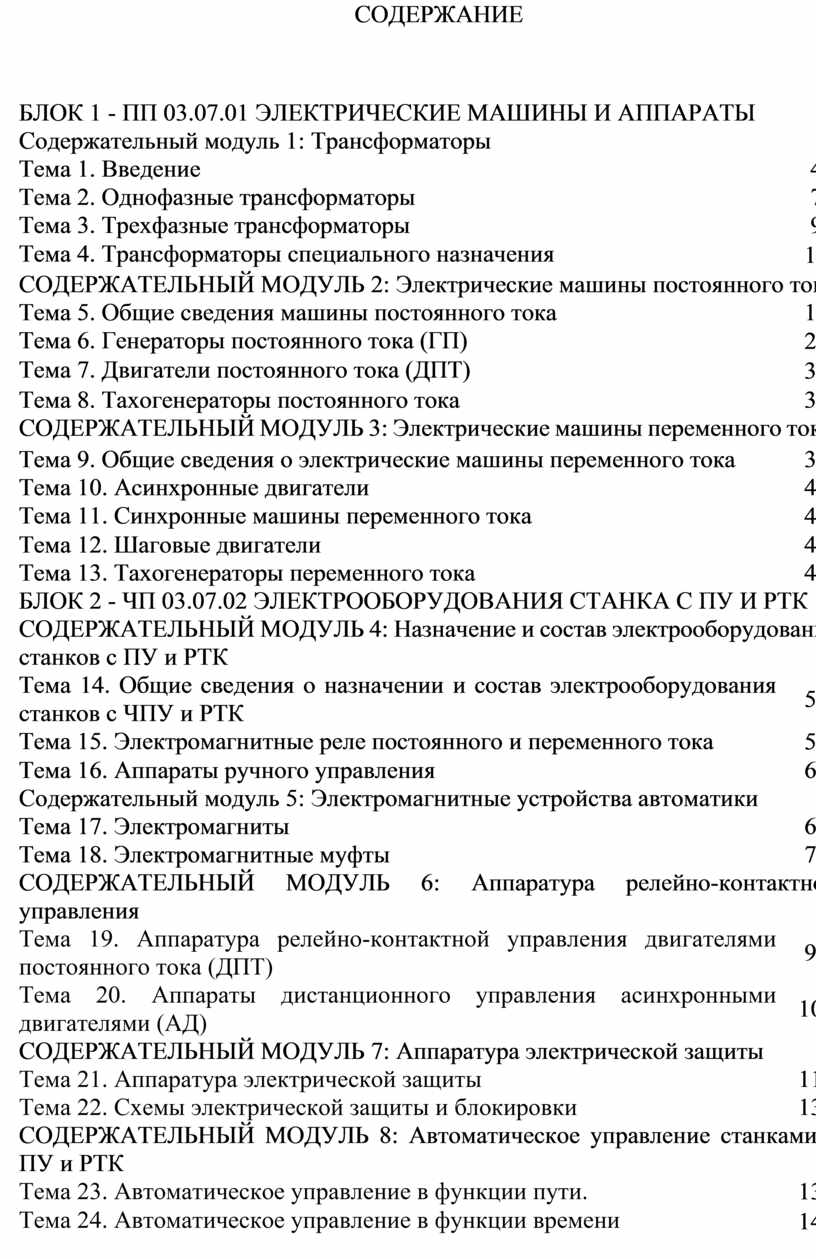
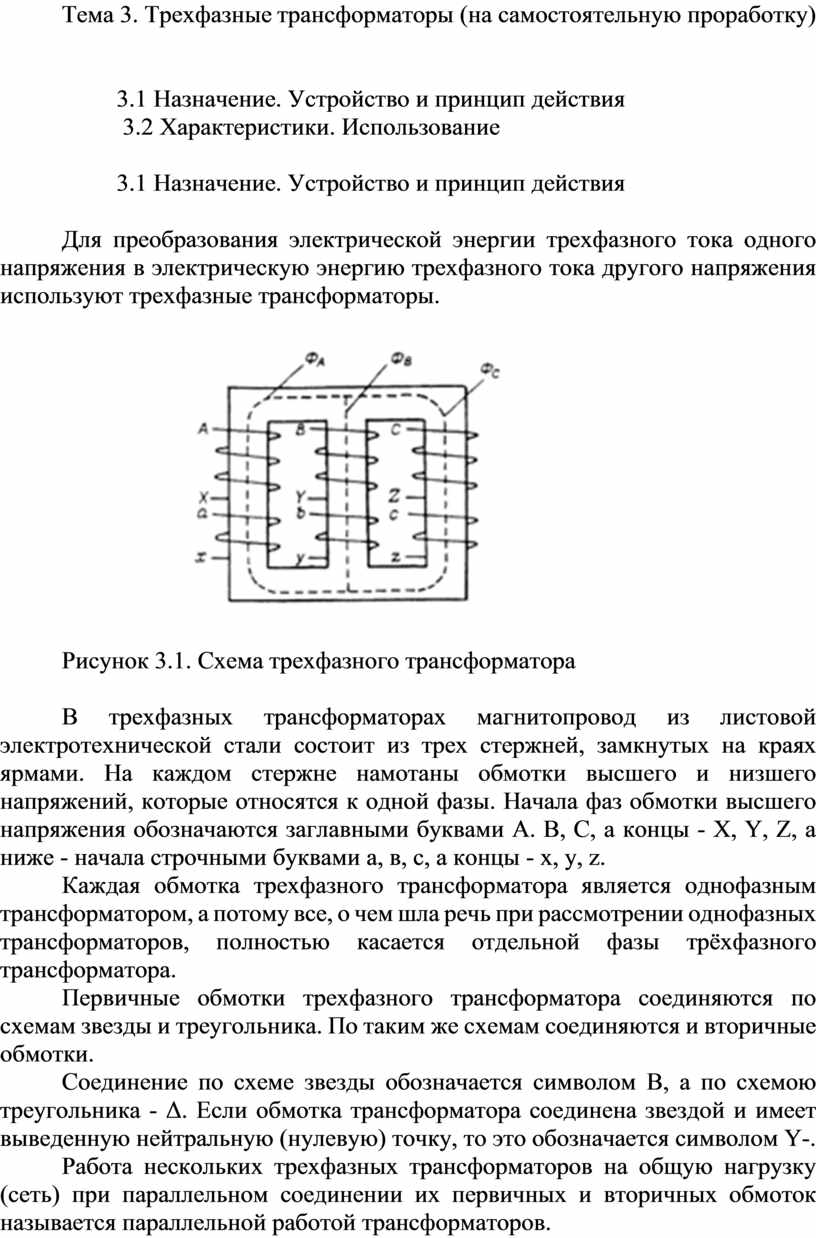
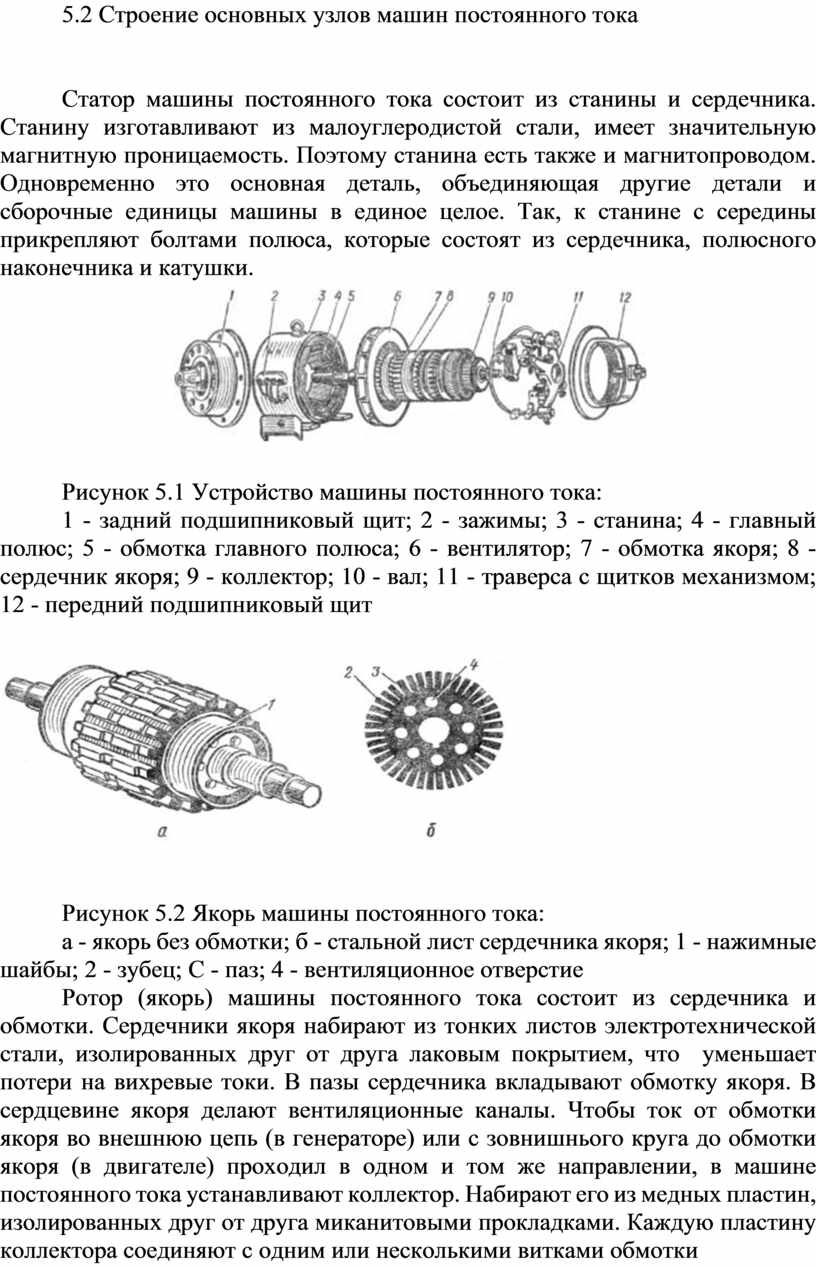

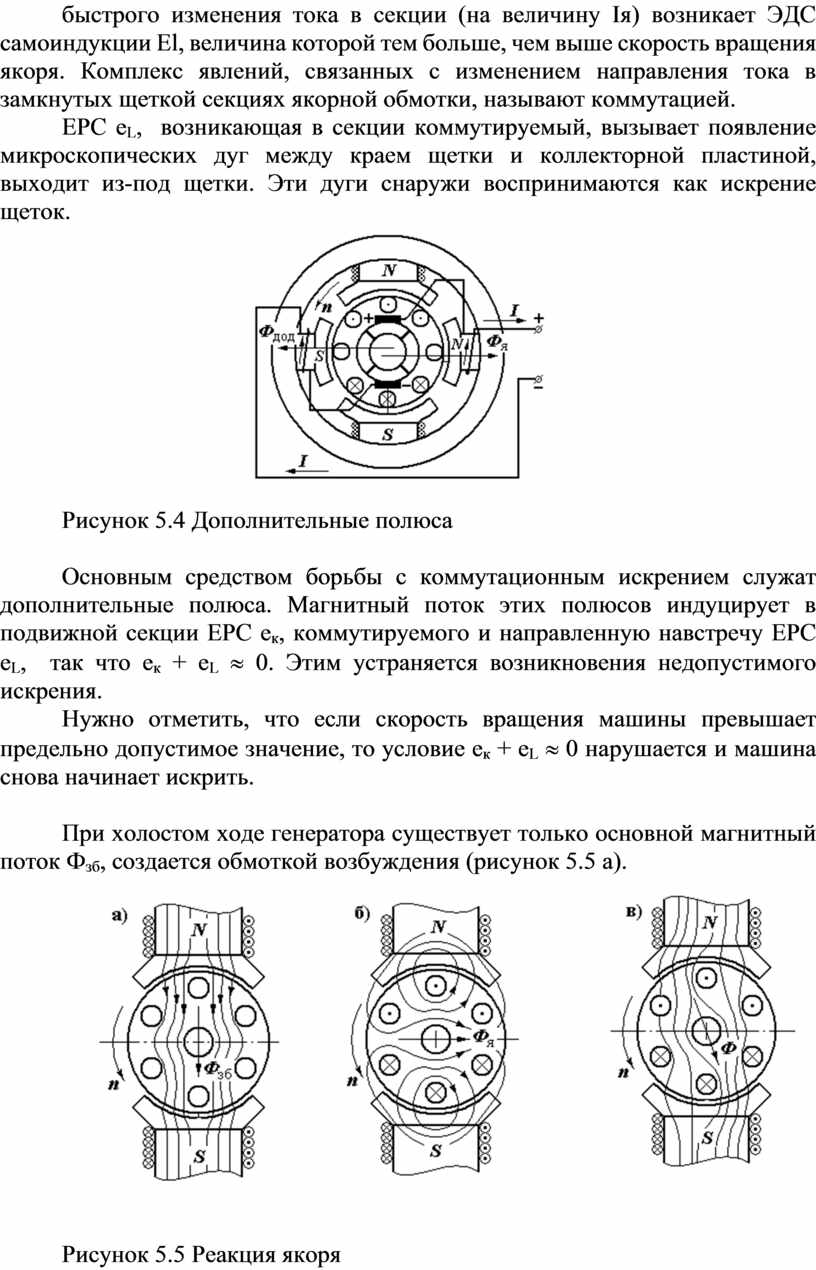
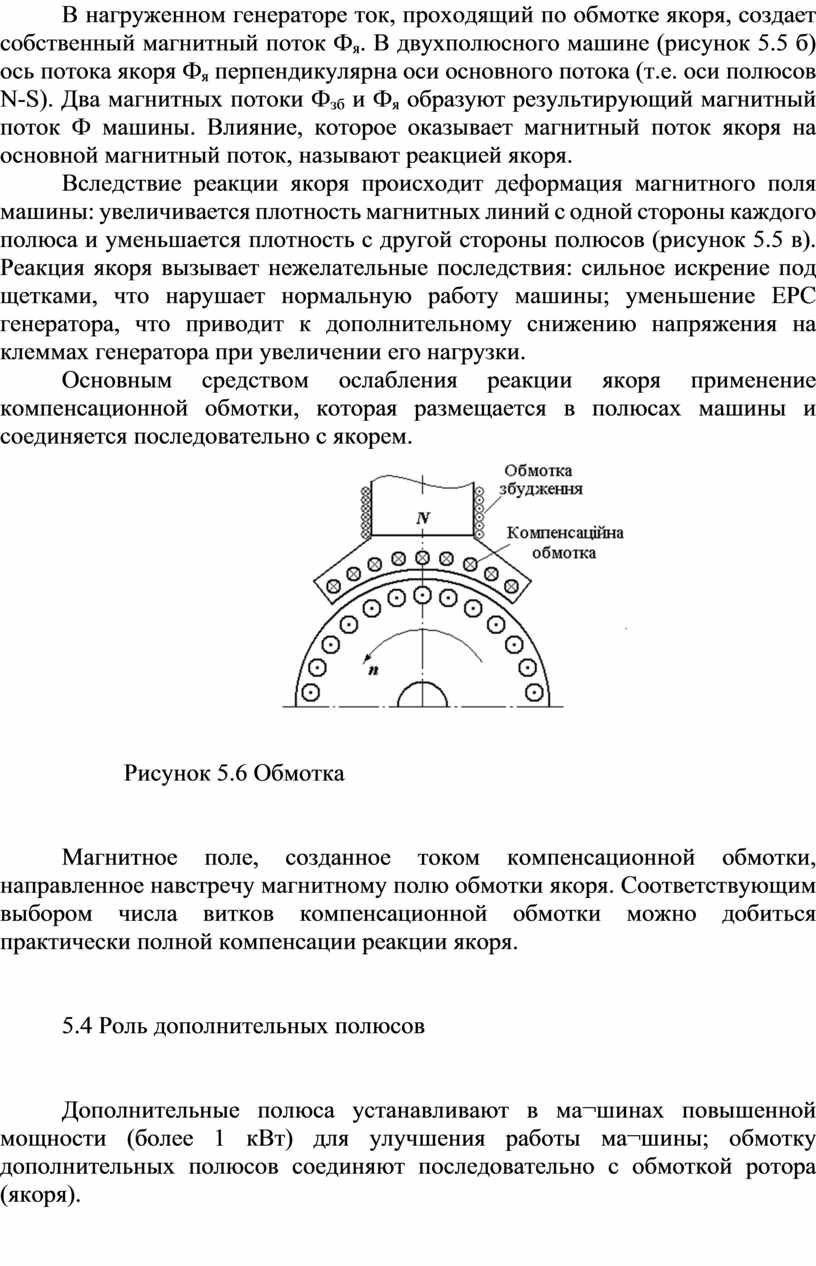
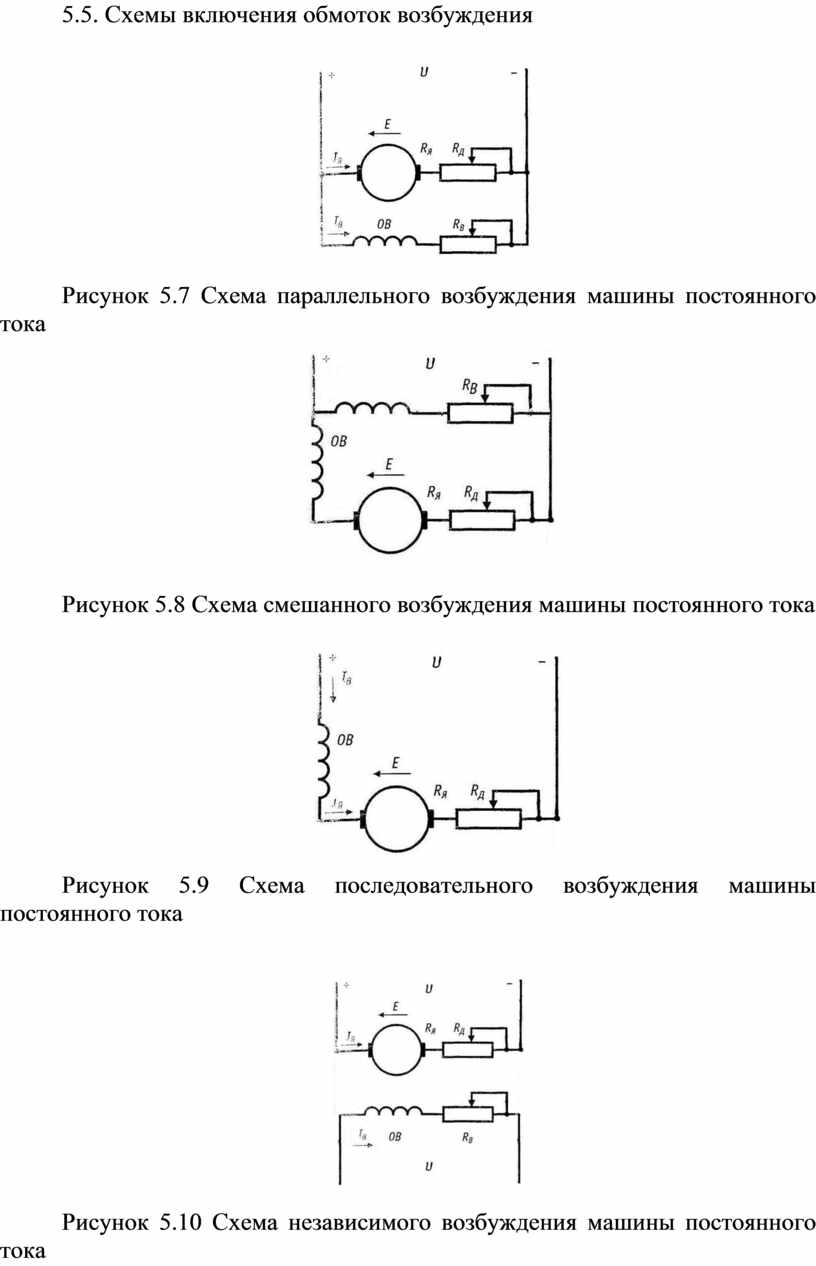
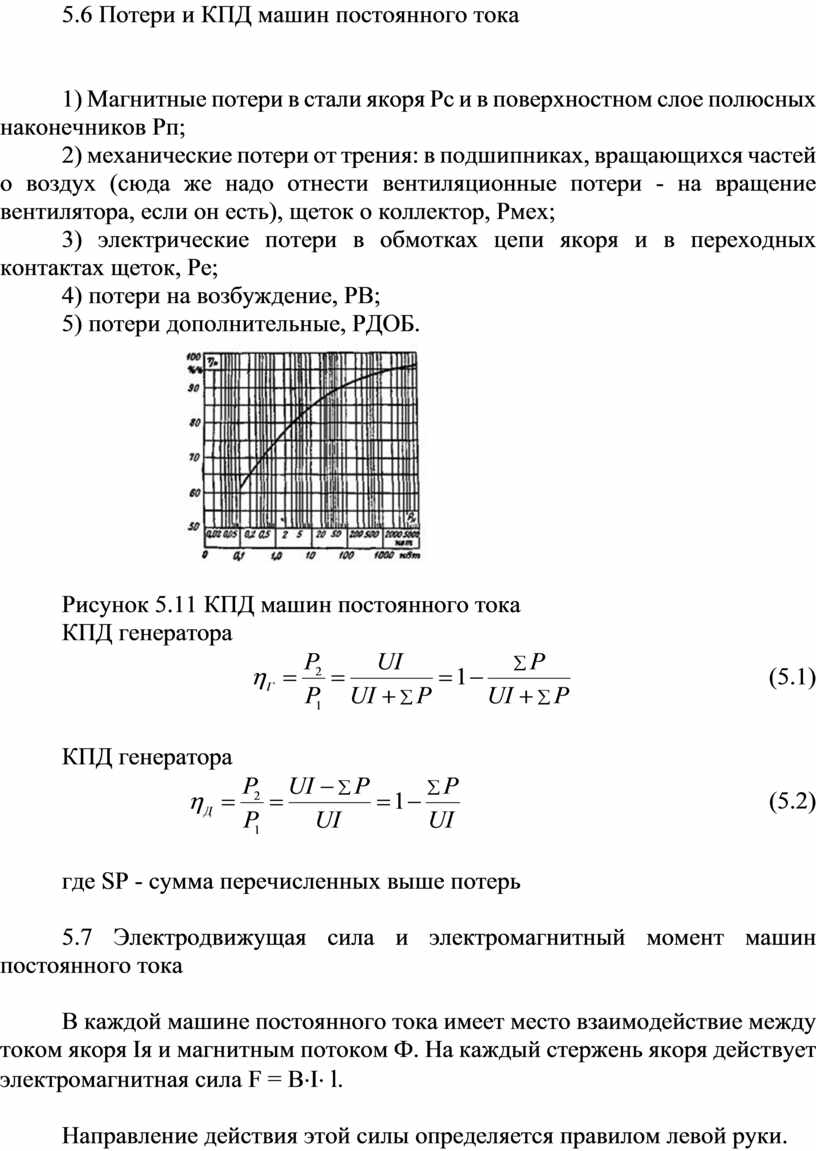
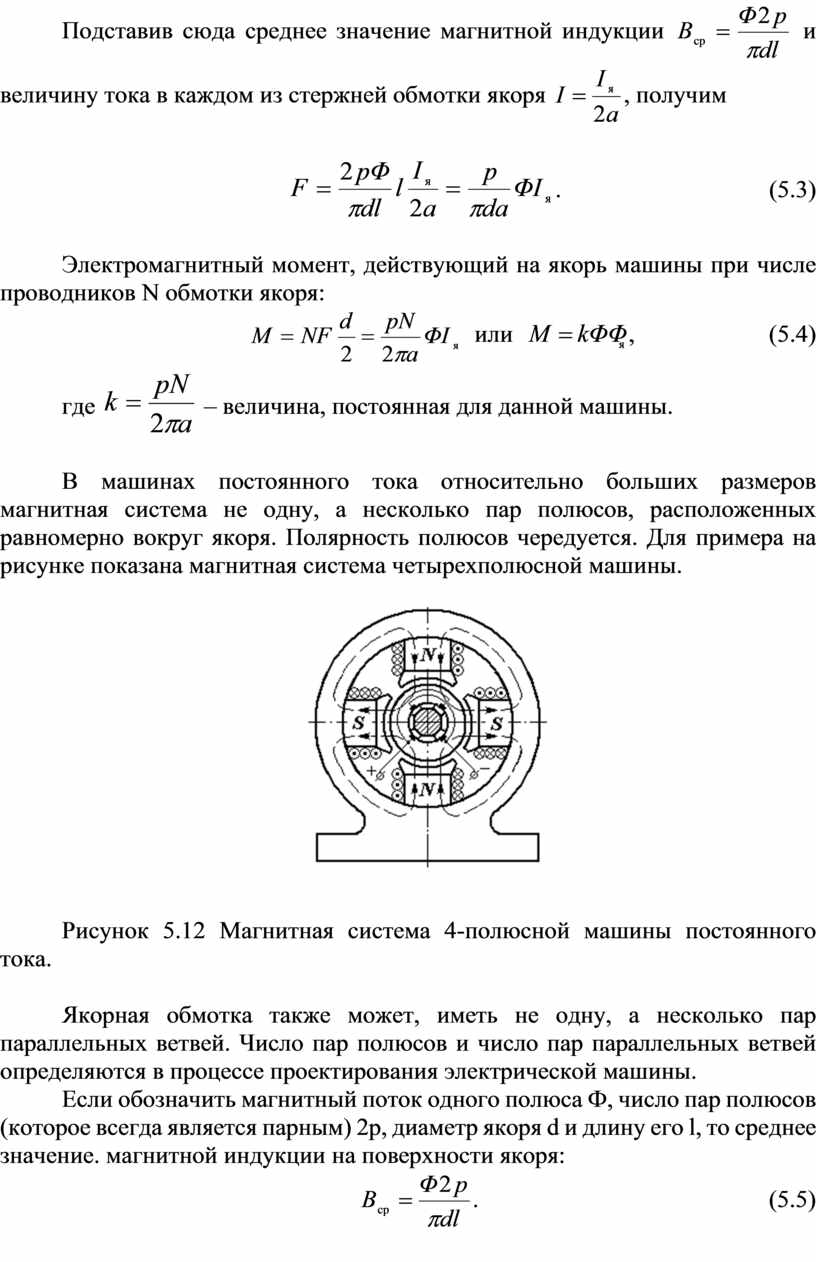
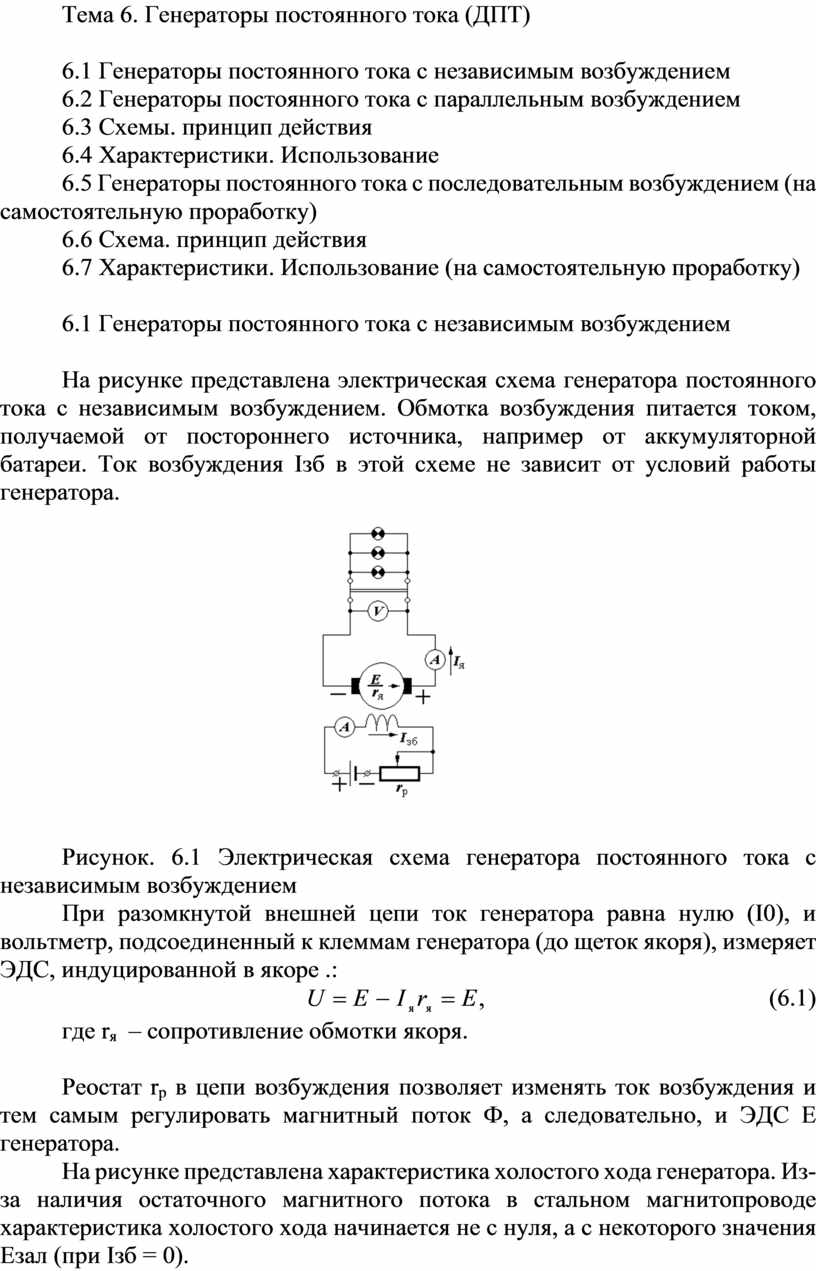
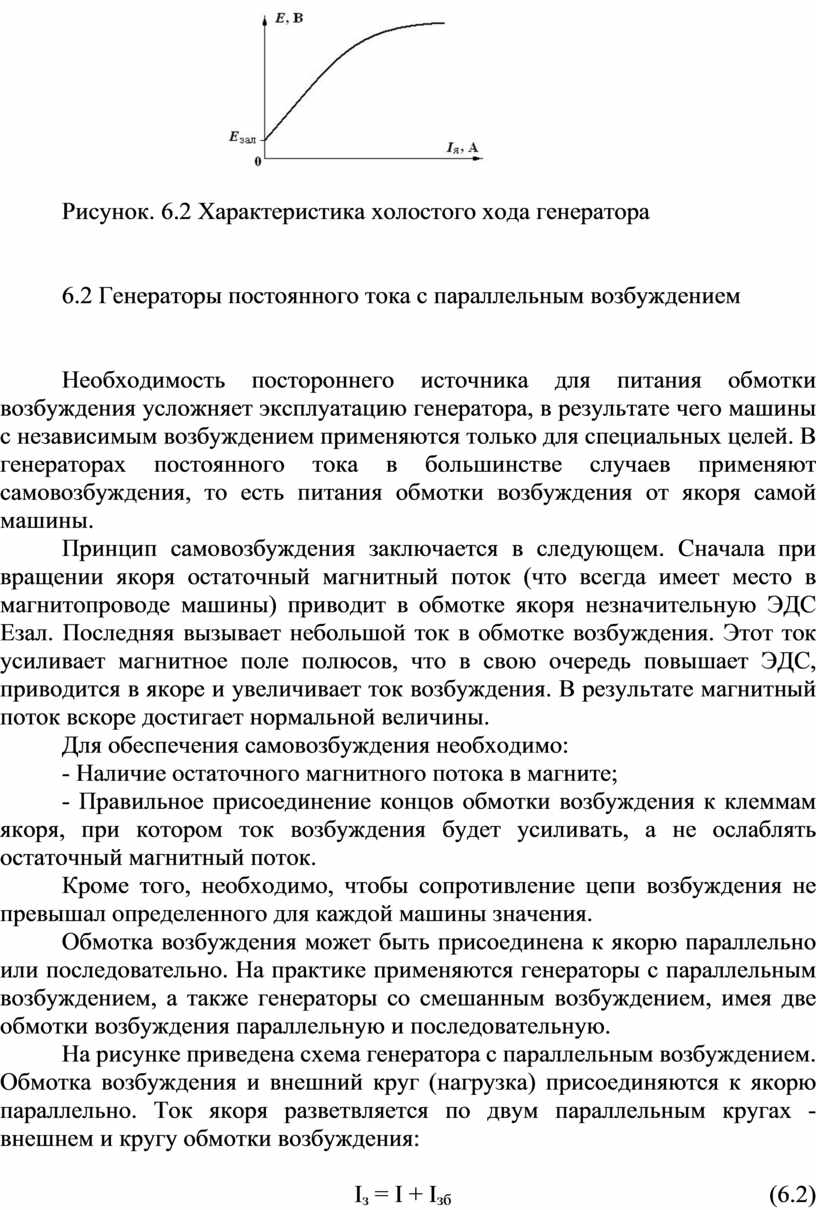
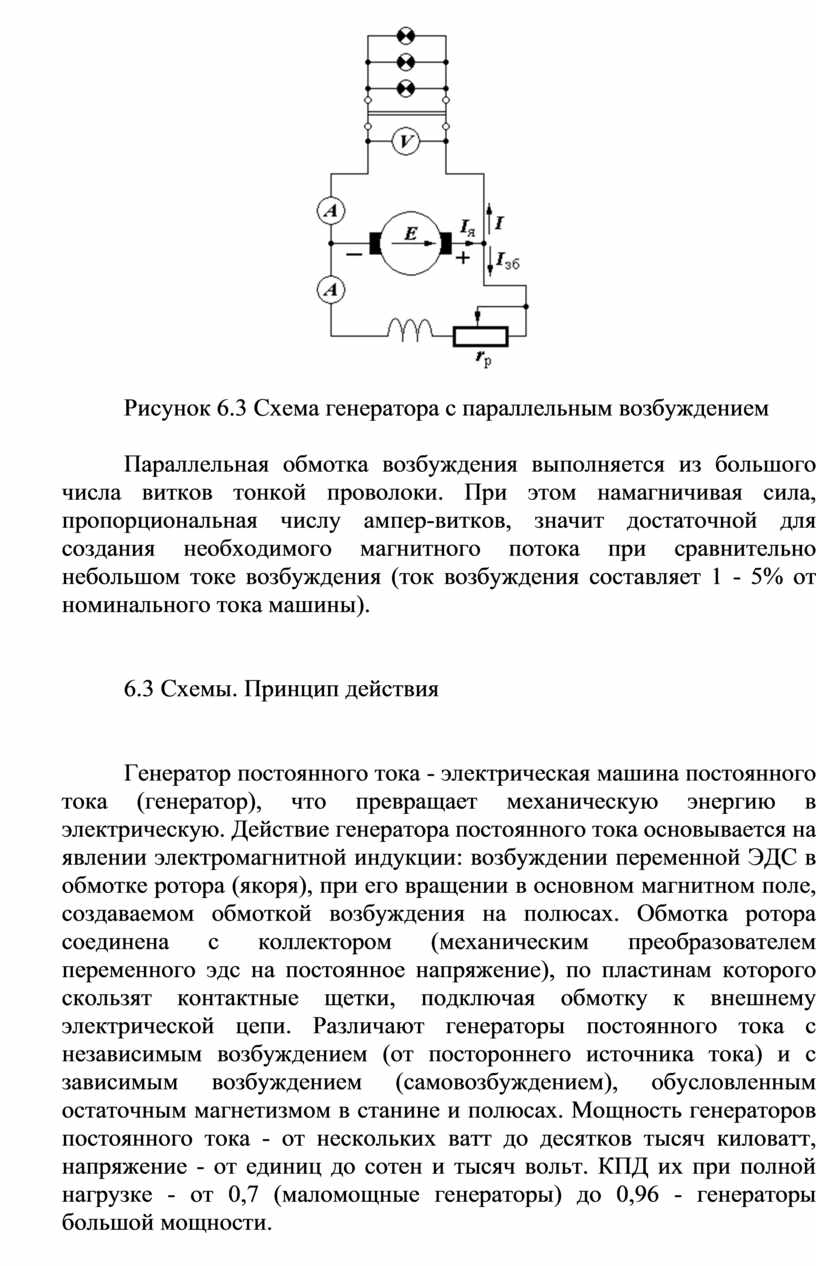
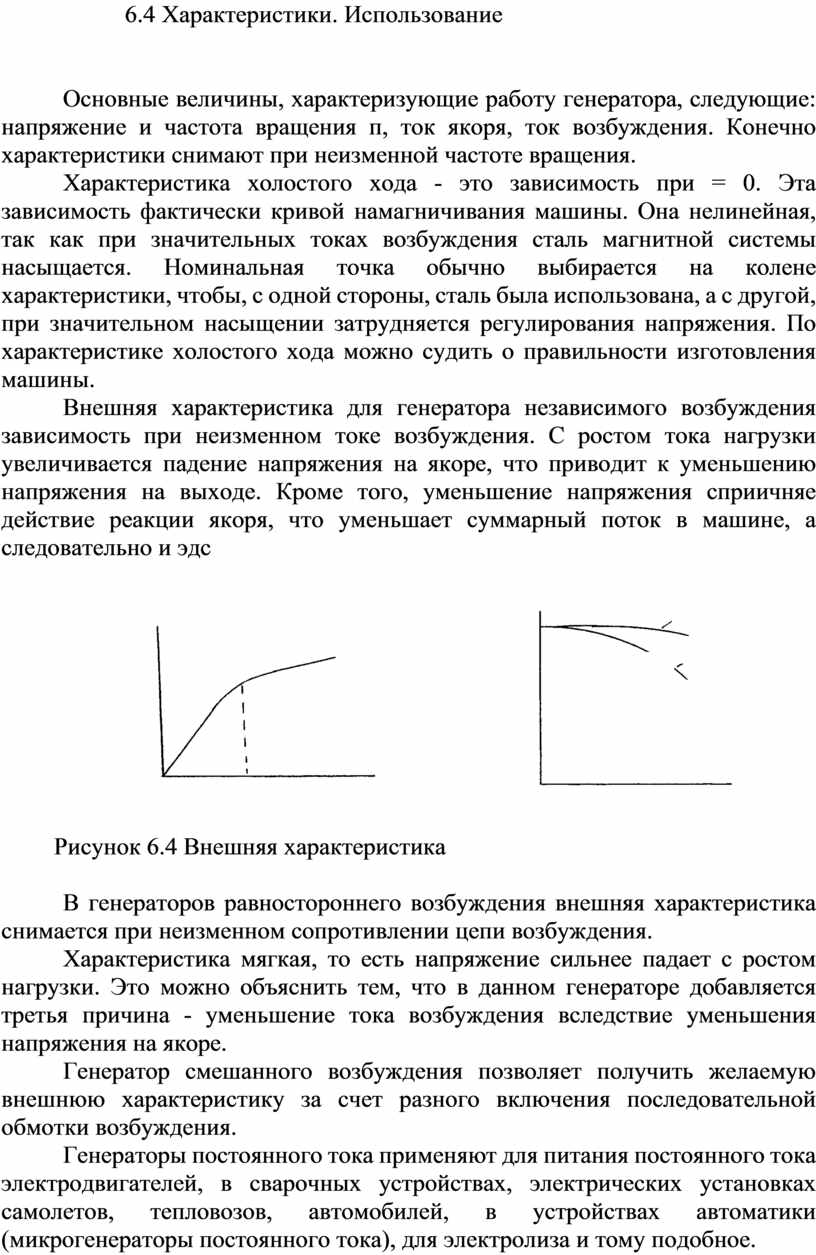
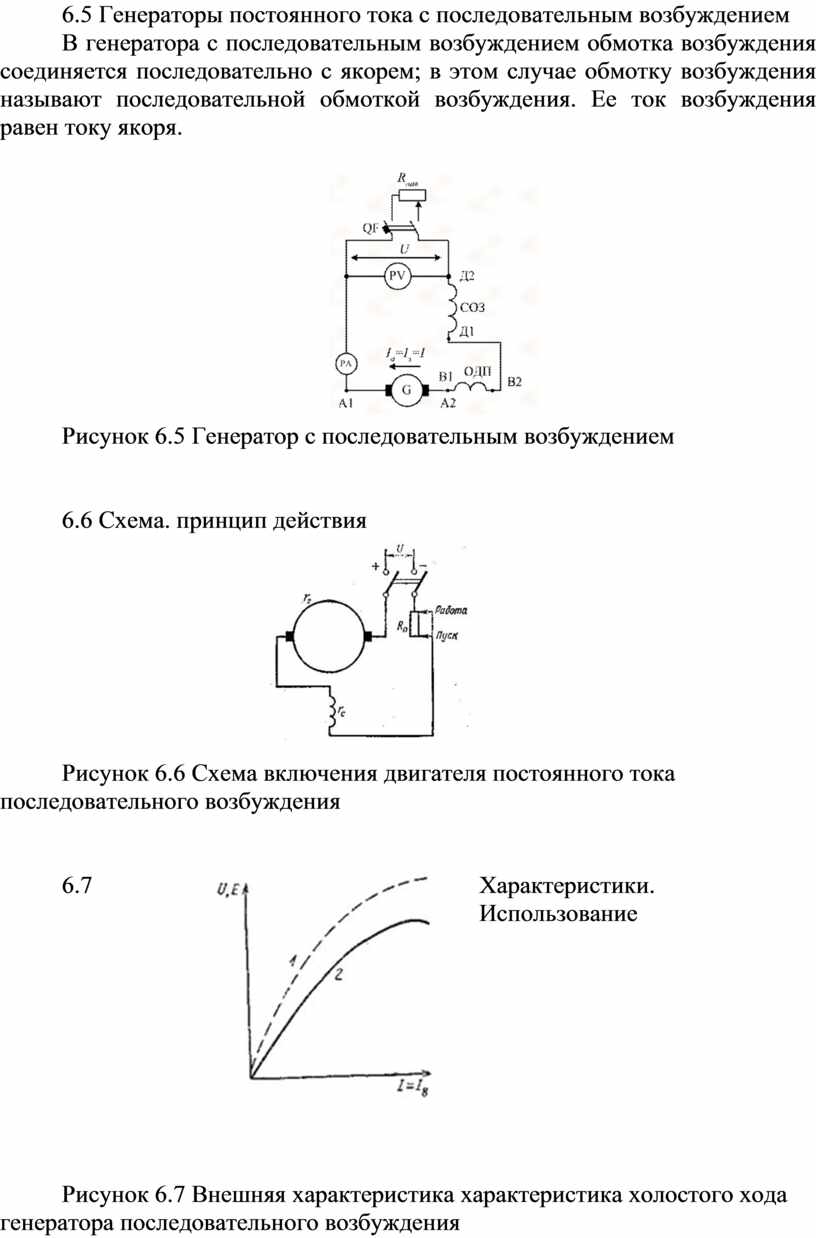
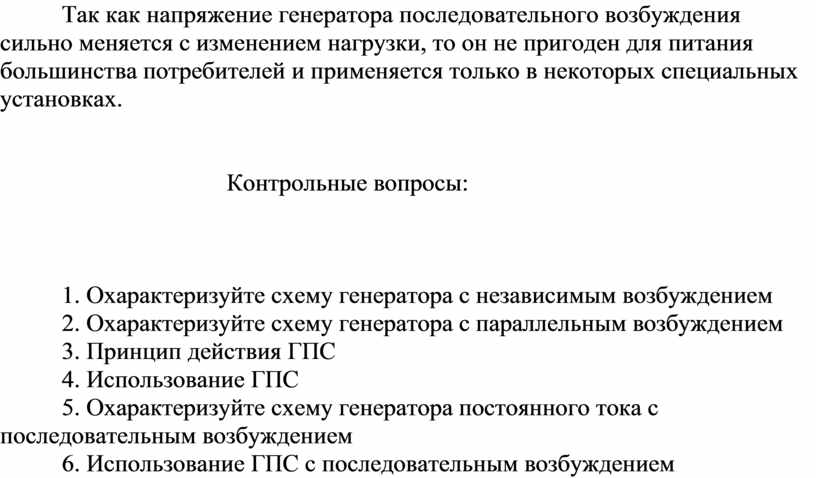
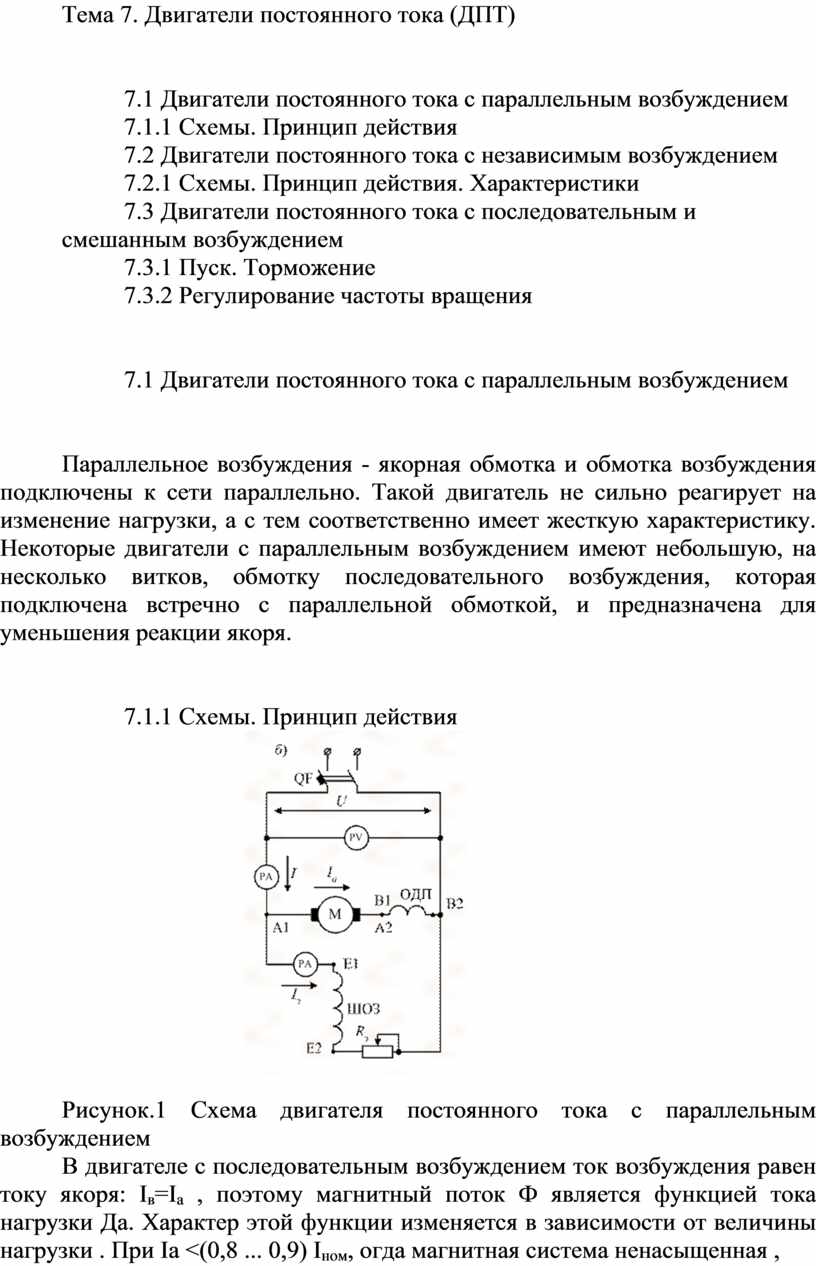
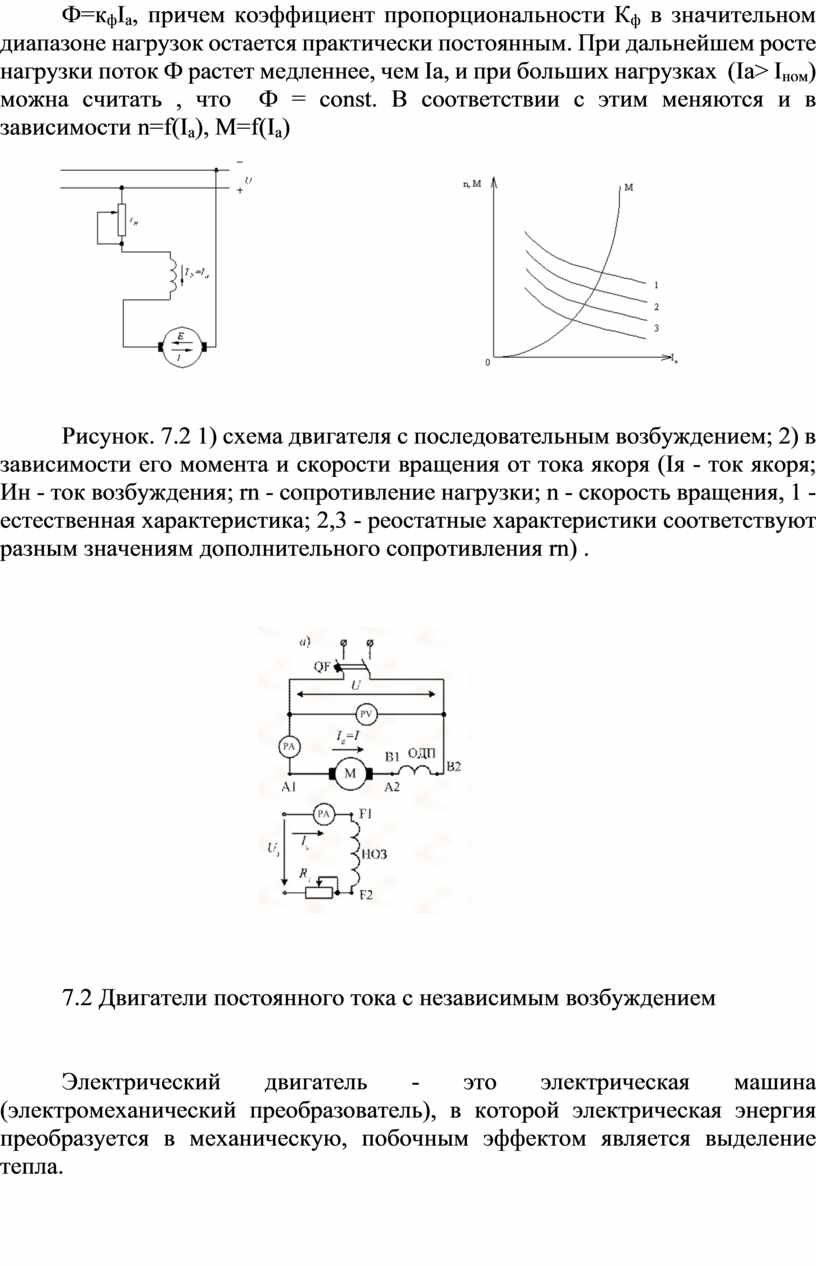
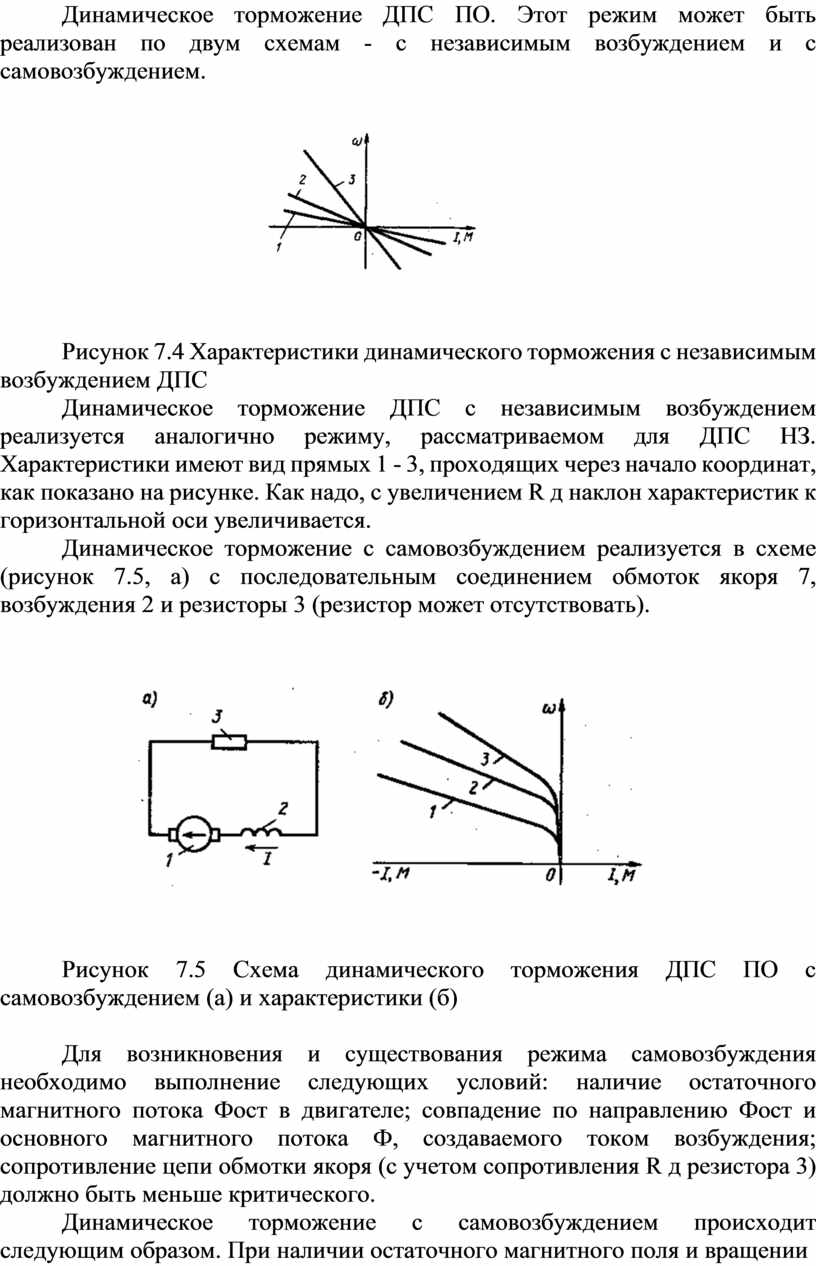
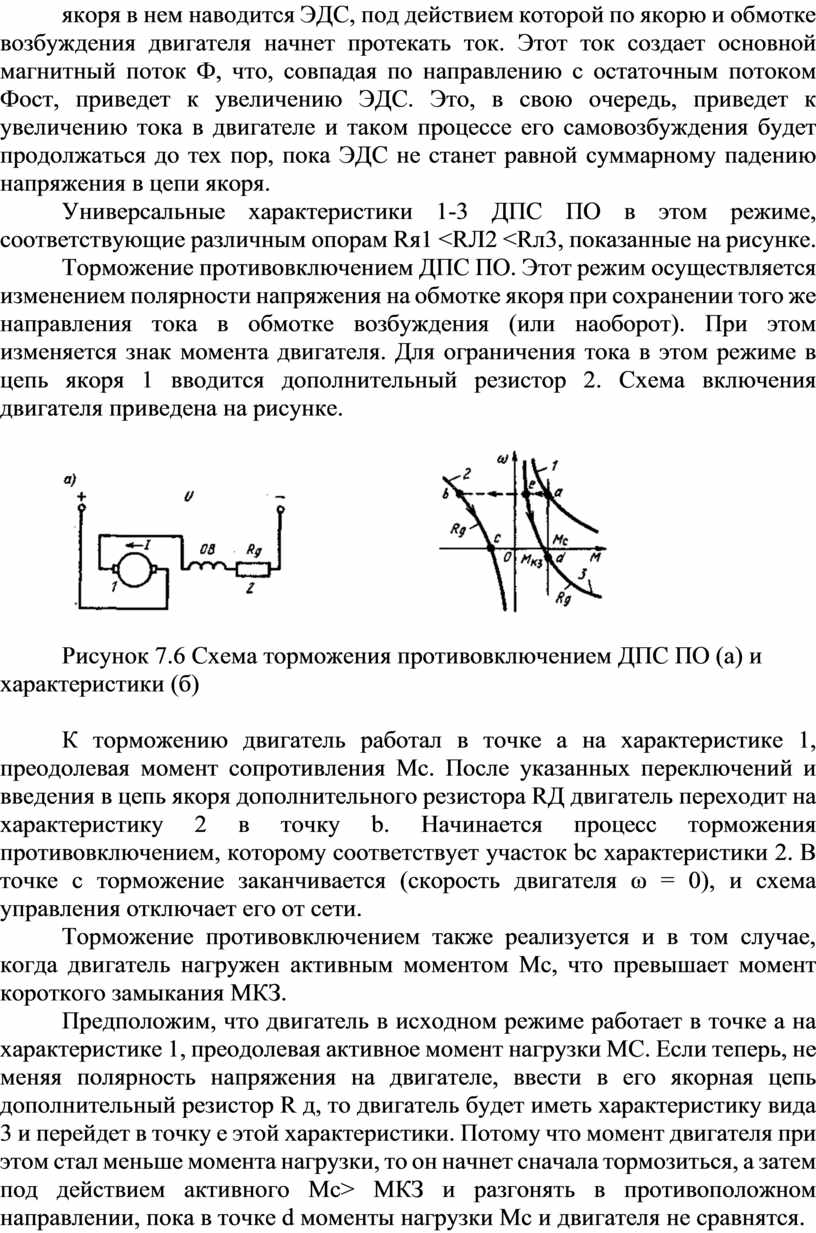
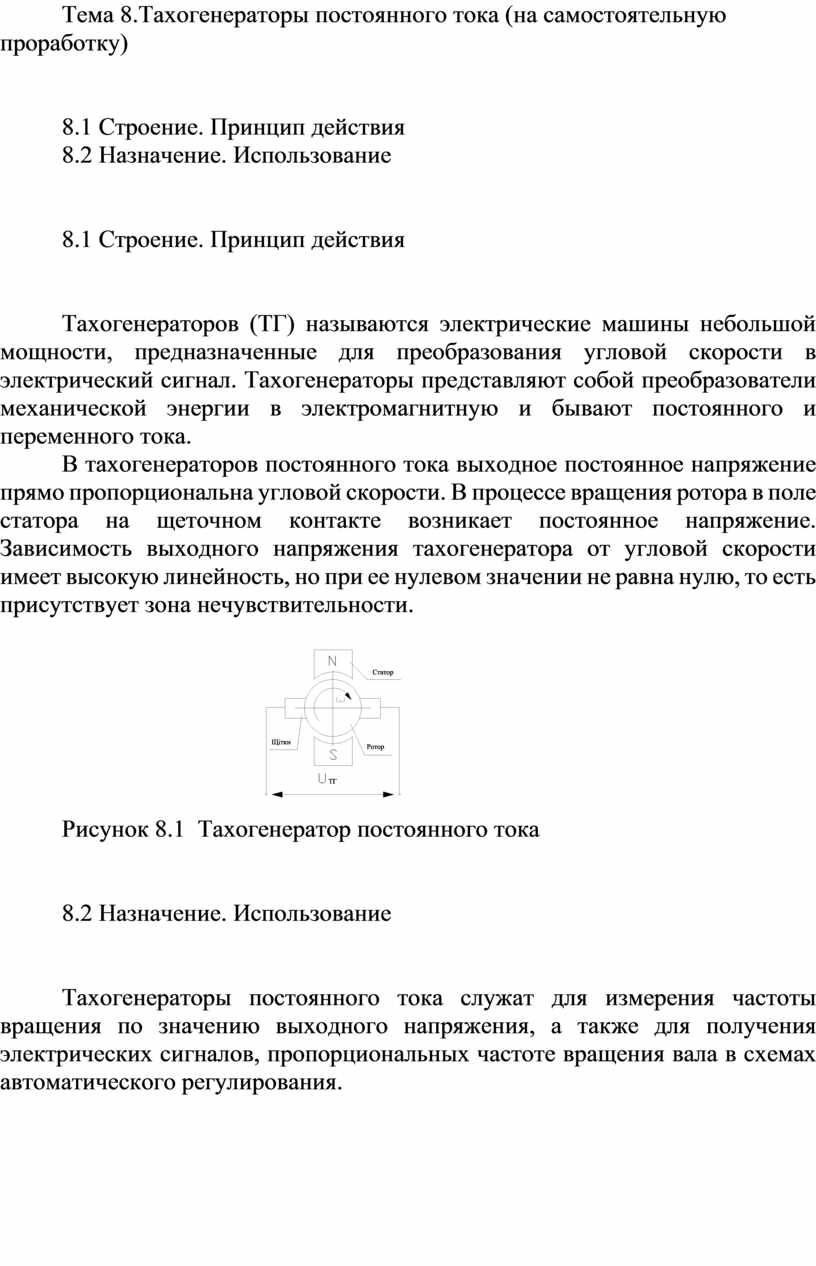
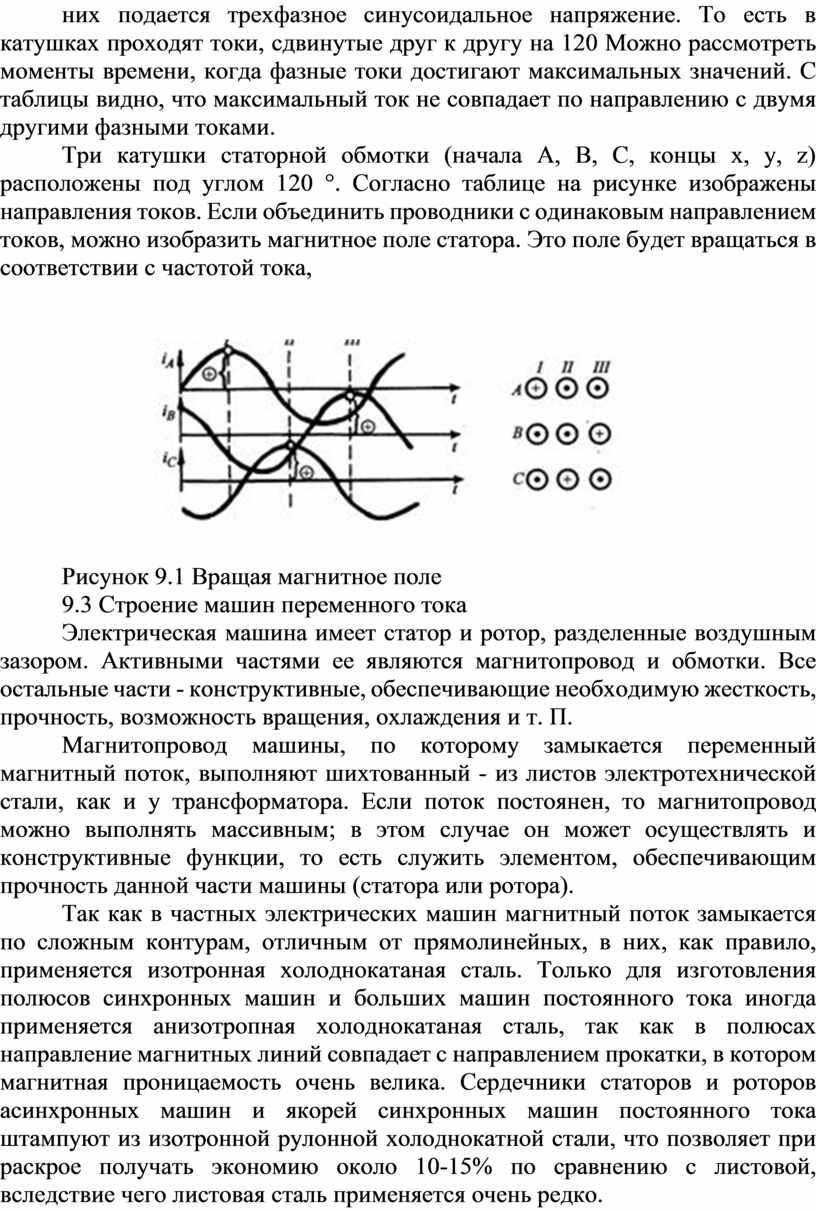
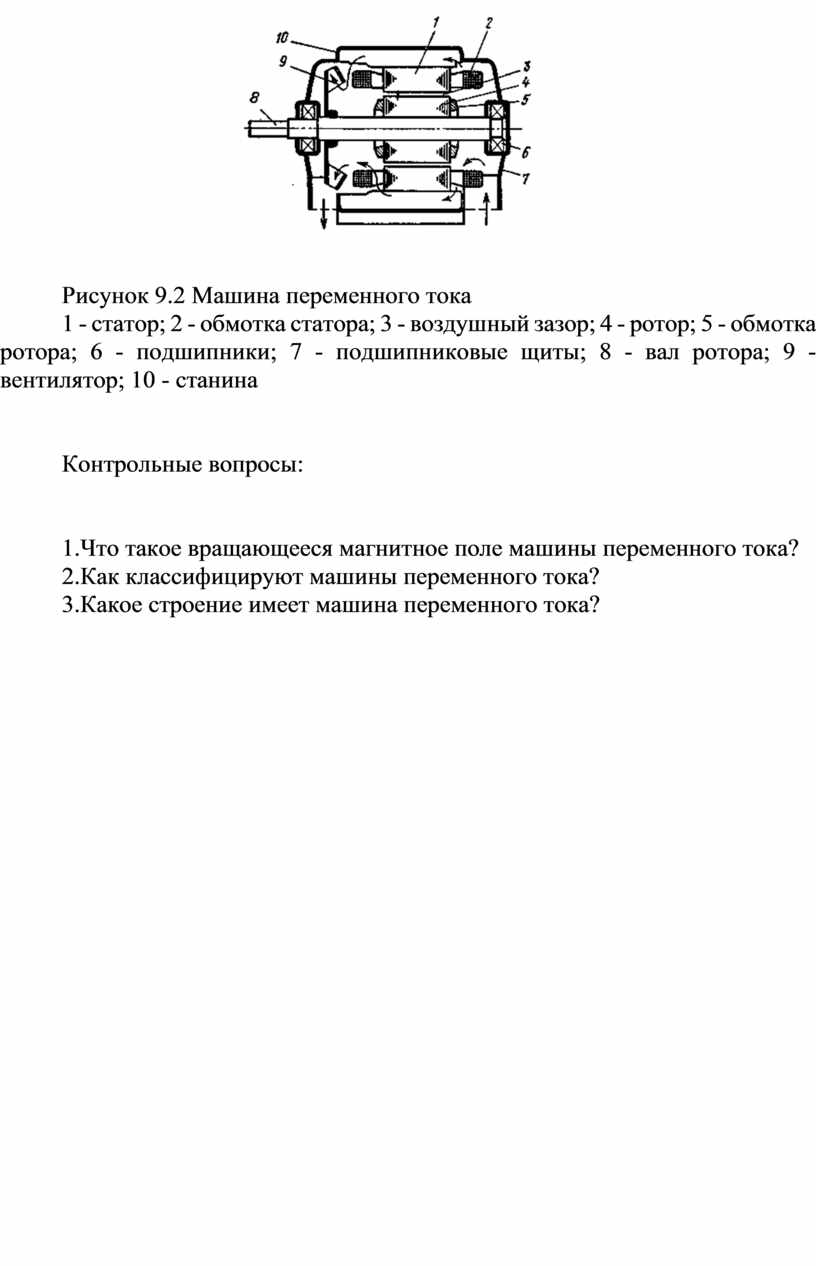
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.