Со времён изобретения Джеймсом Уаттом паровой машины стояла задача построения шарнирного механизма, переводящего движение по окружности в прямолинейное движение. Великий русский математик Пафнутий Львович Чебышев не смог точно решить изначальную задачу, однако, исследуя её, разработал теорию приближения функций и теорию синтеза механизмов. Два неподвижных красных шарнира, три звена имеют одинаковую длину. Из-за своего вида, похожего на греческую букву «лямбда», этот механизм и получил своё название «лямбда-механизм» Незакреплённый серый шарнир маленького ведущего звена вращается по окружности, при этом ведомый синий шарнир описывает траекторию, похожую на профиль шляпки белого гриба. Расставим на окружности, по которой равномерно вращается ведущий шарнир, метки через равные промежутки времени и соответствующие им метки на траектории свободного шарнира. Нижнему краю «шляпки» соответствует ровно половина времени движения ведущего звена по окружности
Методическая обработка занятия: «Программная отладка модели робота»
Цели занятия:
Образовательные: сформировать умения строить модели по схемам, закрепить работу с
датчиком касания и датчиком звука, проектирование технического, программного решения
идеи, и ее реализации в виде функционирующей модели.
Развивающие: развитие умения ориентироваться в пространстве, развитие мелкой
моторики.
Воспитательная: воспитание самостоятельности, аккуратности и внимательности работе.
Форма занятия групповая (занятие –практическая работа)
Виды форм: монолог, диалог, решение задач.
Типы взаимодействия: взаимодействие учащихся и учителя, работа в группах, поисковое
взаимодействие.
Вариант использования: объяснение, инструктирование, постановка теоретических
задач, постановление практических задач, эксперимент.
Методы обучения: частично – поисковые (поиск решения под руководством учителя).
Оборудование для занятия: компьютер учительский, проектор; Легоконструкторы
MindstromsNXT 2.0; ПК с установленной средой программирования ПервоРоботNXT 1.1.
Данному занятию предшествовал этап начального конструирования и моделирования,
включающий в себя: знакомство с кинематикой андроидного робота, с основными понятиями
программирования, с программноуправляемыми моделями.
Тип учебного занятия: занятие комплексного применения знаний.
1. Организационный момент
Педагог приветствует учащихся, проверяет подготовленность рабочего места к уроку и
Ход занятия
организует внимание учащихся.
2. Объявление темы, целей, задач занятия
Педагог сообщает тему занятия, цели и задачи.
Сегодня мы более подробно познакомимся с принципами аппаратной и программной
отладки готовой модели робота. Применитьзнания полученные ранее на практике и
протестировать, выполненный проект «Шагающий робот, реагирующий на столкновение с
препятствием». Для этого необходимо вспомнить работу с датчиками касания и звука их
назначение, функции.
Задачи занятия:
1) Собрать, доработать (отладить) модель по технологической карте.
2) Написать и отладить для нее программу, загрузить программу в NXT.
3) Протестироватьмодель и отладить
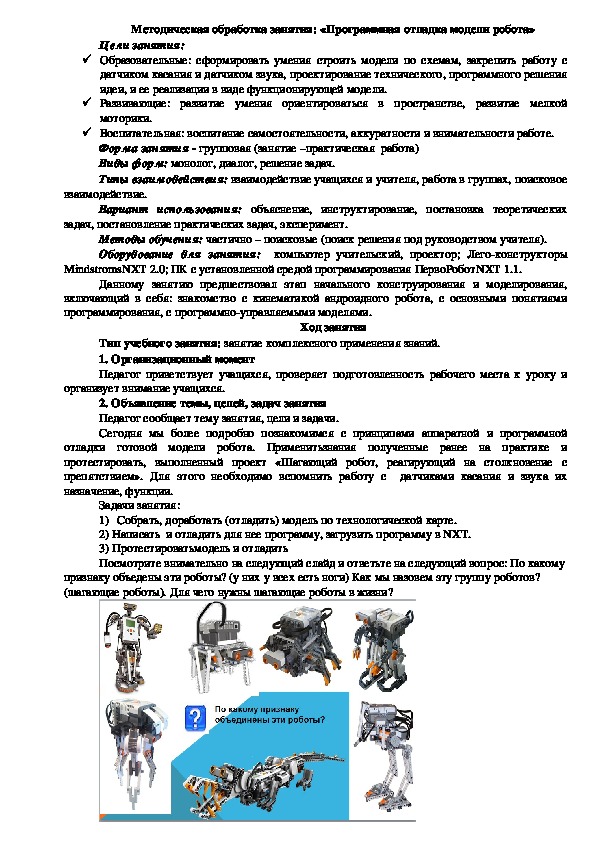
Посмотрите внимательно на следующий слайд и ответьте на следующий вопрос: По какому
признаку объедены эти роботы? (у них у всех есть ноги) Как мы назовем эту группу роботов?
(шагающие роботы). Для чего нужны шагающие роботы в жизни?Ответы на вопросы.
3. Историческая справка
Со времён изобретения Джеймсом Уаттом паровой машины стояла задача построения
шарнирного механизма, переводящего движение по окружности в прямолинейное движение.
Великий русский математик Пафнутий Львович Чебышев не смог точно решить изначальную
задачу, однако, исследуя её, разработал теорию приближения функций и теорию синтеза
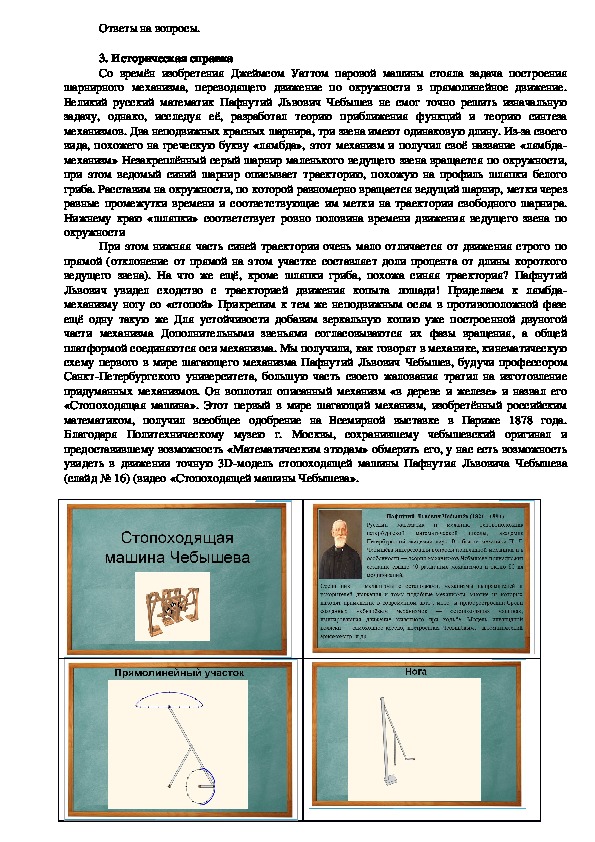
механизмов. Два неподвижных красных шарнира, три звена имеют одинаковую длину. Изза своего
вида, похожего на греческую букву «лямбда», этот механизм и получил своё название «лямбда
механизм» Незакреплённый серый шарнир маленького ведущего звена вращается по окружности,
при этом ведомый синий шарнир описывает траекторию, похожую на профиль шляпки белого
гриба. Расставим на окружности, по которой равномерно вращается ведущий шарнир, метки через
равные промежутки времени и соответствующие им метки на траектории свободного шарнира.
Нижнему краю «шляпки» соответствует ровно половина времени движения ведущего звена по
окружности
При этом нижняя часть синей траектории очень мало отличается от движения строго по
прямой (отклонение от прямой на этом участке составляет доли процента от длины короткого
ведущего звена). На что же ещё, кроме шляпки гриба, похожа синяя траектория? Пафнутий
Львович увидел сходство с траекторией движения копыта лошади! Приделаем к лямбда
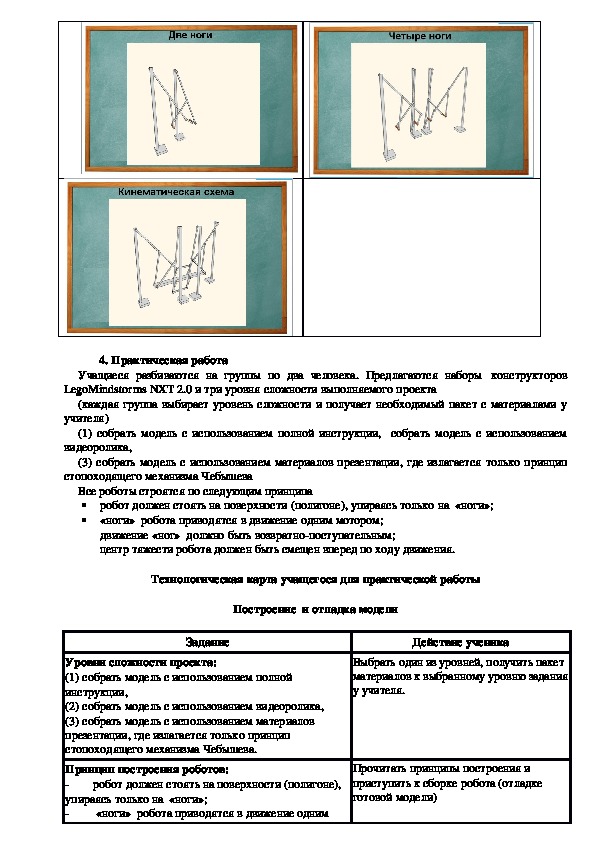
механизму ногу со «стопой» Прикрепим к тем же неподвижным осям в противоположной фазе
ещё одну такую же Для устойчивости добавим зеркальную копию уже построенной двуногой
части механизма Дополнительными звеньями согласовываются их фазы вращения, а общей
платформой соединяются оси механизма. Мы получили, как говорят в механике, кинематическую
схему первого в мире шагающего механизма Пафнутий Львович Чебышев, будучи профессором
СанктПетербургского университета, большую часть своего жалования тратил на изготовление
придуманных механизмов. Он воплотил описанный механизм «в дереве и железе» и назвал его
«Стопоходящая машина». Этот первый в мире шагающий механизм, изобретённый российским
математиком, получил всеобщее одобрение на Всемирной выставке в Париже 1878 года.
Благодаря Политехническому музею г. Москвы, сохранившему чебышевский оригинал и
предоставившему возможность «Математическим этюдам» обмерить его, у нас есть возможность
увидеть в движении точную 3Dмодель стопоходящей машины Пафнутия Львовича Чебышева
(слайд № 16) (видео «Стопоходящей машины Чебышева».4. Практическая работа
Учащиеся разбиваются на группы по два человека. Предлагаются наборы конструкторов
LegoMindstorms NXT 2.0 и три уровня сложности выполняемого проекта
(каждая группа выбирает уровень сложности и получает необходимый пакет с материалами у
учителя)
(1) собрать модель с использованием полной инструкции, собрать модель с использованием
видеоролика,
(3) собрать модель с использованием материалов презентации, где излагается только принцип
стопоходящего механизма Чебышева
Все роботы строятся по следующим принципа
робот должен стоять на поверхности (полигоне), упираясь только на «ноги»;
«ноги» робота приводятся в движение одним мотором;
движение «ног» должно быть возвратнопоступательным;
центр тяжести робота должен быть смещен вперед по ходу движения.
Технологическая карта учащегося для практической работы
Построение и отладка модели
Задание
Уровни сложности проекта:
(1) собрать модель с использованием полной
инструкции,
(2) собрать модель с использованием видеоролика,
(3) собрать модель с использованием материалов
презентации, где излагается только принцип
стопоходящего механизма Чебышева.
Принцип построения роботов:
робот должен стоять на поверхности (полигоне),
упираясь только на «ноги»;
«ноги» робота приводятся в движение одним
Действие ученика
Выбрать один из уровней, получить пакет
материалов к выбранному уровню задания
у учителя.
Прочитать принципы построения и
приступить к сборке робота (отладке
готовой модели)мотором;
движение «ног» должно быть возвратно
поступательным;
центр тяжести робота должен быть смещен
вперед по ходу движения.
Программирование модели
Принцип построения программы:
использовать блок «Цикл», сконфигуровать его
как бесконечный цикл;
использовать блок «Движение» внутри
бесконечного цикла;
настроить блок, выбрав двигатель А,
направление движения вперед, уровень мощности
50%, длительность движения бесконечность.
Прочитать принципы написания
программы, составить программу,
загрузить в робота.
протестировать работоспособность
программы
Произвести отладку программы
Эксперимент
Учащиеся проводят тестирование и демонстрацию готовых моделей роботов.
Оценка проделанной работы.
По окончанию практической работы учащиеся представляют свои работы. Обсуждают
проект (что можно было добавить в программу). Выбор лучшей модели.
5. Подведение итогов занятия
Учащиеся подводят итог занятия, чему научились, что нового узнали.
С какими роботами мы сегодня работали?
Что показалось вам сегодня трудным?
А что удавалось без особого труда?
Что еще вы хотели бы узнать о шагающих роботах?
Помогает ли отладка в разработке проекта?
Обсуждают, где можно применить андроидных и шагающих роботов. Приходят к выводу, что
изучение данной темы существенно облегчает программирование модели и делает программу
более универсальной.